Fakultas Ilmu Komputer
Universitas Brawijaya 4734
Deteksi Helm untuk Keamanan Pengendara Sepeda Motor dengan Metode CNN (Convolutional Neural Network) menggunakan Raspberry Pi
Ikhsan Rahmad Ilham1, Fitri Utaminingrum2
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected]
Abstrak
Faktor kecelakaan lalu-lintas disebabkan oleh 3 faktor seperti kelalaian manusia, keadaan dari kendaraan dan juga factor dari lingkungan. Menurut WHO (World Health Organization) penggunaan helm pada pengendara sepeda motor dapat menurunkan resiko kematian sampai dengan 40% dengan menggunakan helm juga dapat mengurangi resiko cedera parah lebih dari 70%. Penggunaan helm sebagai keamanan bagi pengendara sepeda motor masih dianggap tidak begitu penting sehingga diabaikan, oleh sebab itu kecelakaan pengendara sepeda motor terutama pengendara yang tidak menggunakan helm dan tingkat pelanggaran lalu-lintas tinggi. Faktor kelelahan pada polisi dalam memantau lalu-lintas menyebabkan mengabaikan pengendara yang melanggar dengan tidak menggunakan helm saat berkendara. Oleh karena itu deteksi helm bagi pengendara sepeda motor sangat penting, yaitu menggunakan teknologi untuk memperoleh informasi pengendara sepeda motor yang melanggar aturan. Berdasarkan beberapa faktor tersebut, setelah mengetahui penyebab dari kecelakaan pengendara sepeda motor di lalu-lintas dapat dikurangi salah satu solusi nya yaitu menggunakan computer vision untuk deteksi helm sebagai keamanan pengendara sepeda motor dalam berkendara serta mempermudah pekerjaan aparat polisi dalam menjaga lalu-lintas dengan cara pemberitahuan notifikasi pelanggaran lalu lintas pengendara yang tidak menggunakan helm dengan alert buzzer. Penulis mengusulkan metode CNN (Convolutional Neural Network) sebagai deteksi pengendara motor yang melanggar lalu-lintas seperti tidak menggunakan helm, dengan demikian dapat mengurangi kecelakaan pada lalu-lintas. Hasil pengujian yang telah dilakuukan sistem dapat mendeteksi objek orang tidak menggunakan helm dengan akurasi sebesar 90% menggunakan confusion matrix pada hasil pengujian.
Kata kunci: Convolutional Neural Network, lalu-lintas, pengendara, sepeda motor, kamera, buzzer.
Abstract
Traffic accident factors are caused by 3 factors such as human negligence, the state of the vehicle and also environmental factors. According to WHO (World Health Organization) the use of helmets for motorcycle riders can reduce the risk of death by up to 40%. The use of helmets as safety for motorcycle riders is still considered not so important that it is ignored, therefore motorcycle accidents, especially motorcyclists who do not use helmets and the level of traffic violations are high. The fatigue factor for the police in monitoring traffic causes ignoring motorists who violate by not wearing a helmet while driving. Therefore helmet detection for motorcycle riders is very important, namely using technology to obtain information on motorcycle riders who violate the rules. Based on these factors, after knowing the causes of motorcycle accidents in traffic, one solution can be reduced, namely using computer vision for helmet detection as motorcycle riders' safety in driving and facilitating the work of police officers in guarding traffic by way of notification. notification of traffic violations of motorists who are not wearing helmets with buzzer alerts. The author proposes the CNN (Convolutional Neural Network) method as a detection of motorcyclists who violate traffic such as not wearing a helmet, thereby reducing traffic accidents. The results of the tests that have been carried out by the system can detect objects of people not wearing helmets with an accuracy of 90% using the confusion matrix on the test results.
Keywords: Convolutional Neural Network, traffic, motorcyclists, motorbike, camera, buzzer.
Fakultas Ilmu Komputer, Universitas Brawijaya
1. PENDAHULUAN
Berdasarkan statistik Korlantas Polri, pada akhir bulan Desember tahun 2018 sampai dengan bulan Maret pada tahun 2019 terdapat total korban kecelakaan sebanyak 28.238 orang.
Namun tahun sebelumnya pada periode yang sama, tepatnya mulai awal Januari tahun 2018 sampai dengan tanggal 1 April pada tahun 2019 tercatat 25.347 orang (Danajaya D,2019).
Menurut WHO (World Health Organization) menyatakan penggunaan helm pada pengendara sepeda motor dapat menurunkan resiko kematian hingga mencapai 40% dan pemakaian helm dapat mengurangi resiko cedera parah pada pengendara lebih dari 70% (Rahadiansyah R, 2018).
Salah satu faktor tingginya angka kecelakaan sepeda motor yaitu kelelahan pada polisi dalam memantau lalu-lintas sehingga sering mengabaikan pengendara yang melanggar dengan tidak menggunakan helm saat berkendara. Oleh karena itu dekteksi helm bagi pengendara sepeda motor sangat penting, yaitu dengan menggunakan teknologi untuk memperoleh informasi pengendara sepeda motor yang melanggar aturan, terutama bagi pengendara yang tidak menggunakan helm.
Penulis berasumsi berdasarkan faktor tersebut, pengendara sepeda motor yang melanggar aturan lalu-lintas dapat dikurangi dengan menggunakan sistem deteksi helm sebagai keamanan pengendara sepeda motor.
Teknologi deep learning menjadi solusi pada kasus deteksi objek pada sistem deteksi helm dengan metode CNN. Metode ini termasuk yang saat ini memiliki tingkat akurasi yang baik dalam deteksi objek. Penulis ingin merancang atau mengembangkan dengan membuat sistem yang memanfaatkan kamera yang dipasang di perempatan atau persimpangan jalan dekat dengan lampu lalu lintas agar dapat mendeteksi pengendara yang melanggar lalu lintas yang tidak menggunakan helm secara real-time.
Kelemahan dari metode Convolutional Neural Network yaitu waktu komputasi yang cukup lama dalam mendeteksi objek, sehingga membutuhkan perangkat keras yang memiliki prosesor atau spesifikasi yang lebih baik.
2. LANDASAN KEPUSTAKAAN 2.1 Penelitian Tekait
Penelitian terkait dilakukan oleh Sugianto., Setyani, E., Armanto, H. (2019). Peneliti merancang suatu sistem sistem deteksi alat head protection (Helm) using haarrcasade classifier method. Hasil dari penelitian tersebut mendapatkan akurasi sebesar 92% dari pengujian yang telah dilakukan. Kemudian pada penelitian yang dilakukan oleh Bahtiar. H (2019) dengan penelitian yang berjudul helmet detection system worn by motorcycle riders for safety riding, penelitian tersebut didapatkan perhitungan presisi dari sistem adalah 89,5% dan tingkat akurasi sebesar 83,3%. Kemudian pada penelitian dengan judul design and build a traffic accident detection helmet as well as location and impact information using Arduino Uno oleh (Maulana A, 2019). Peneliti menggunakan perangkat keras Arduino Uno beserta sensor sensor getaran (piezoelectric) dan sensor tekanan (FSR402) untuk mendeteksi helm. Konsep dari alat pendeteksi helm yang yaitu berupa sistem prototype ketika helm terkena benturan maka proses dilanjutkan dengan mengirimkan pesan GSM pada smartphone serta lokasi kecelakaan.
2.2 Citra Digital
Citra pada sistem deteksi helm merupakan input dari suatu object yang memiliki nilai. Sistem deteksi helm menggunakan citra digital sebagai image processing, yaitu mengolah atau memproses elemen citra dengan dari RGB.
Setiap elemen dapat disebut dengan piksel, kemudian piksel tersebut yang akan diproses sehingga dapat dibaca oleh komputer untuk dilakukan pengolahan citra seperti Gambar 1.
Gambar 1. Matriks Pengolahan Citra Digital 2.3 Convolutional Neural Network
CNN adalah suatu metode machine learning yang menggunakan data tiga dimensi sebagai
input vector, sedangkan representasi neuron pada CNN berbentuk dua dimensi. Layer pada CNN memiliki tiga dimensi yaitu width, height dan depth. Umumnya digunakan untuk pada bidang computer vision untuk detection dan recognition. Pada penelitian ini metode Convolutional Neural Network digunakan untuk Helmet Detection. Metode Convolutional Neural Network (CNN) digunakan memproses citra dan dapat membuat klasifikasi hasil.
Arsitektur pada Convolutional Neural Network (CNN) terdapat model yang memiliki matriks untuk melakukan fungsi filter yang disebut Konvolusi.
2.4 Confussion Matrix
Confussion matrix adalah tabel matrix yang digunakan untuk menggambarkan kinerja dari data uji atau testing pada klasifikasi atau deteksi.
Confusion matrix terditi atas data actual dan data prediksi. Data actual merupakan nilai yang sebenarnya atau nilai asli dari label, sedangkan data prediksi adalah data yang akan diuji yang berasal dari hasil pemodelan. Nilai dari masing- masing kelas pada sistem deteksi helm dapat disimpulkan Berdasarkan pada Tabel 1.
Tabel 1 Confussion matrix
Kelas Prediksi Matriks
Helmet No-Helmet Kelas
Sebenarnya Helmet TP FN
No-Helmet FP TN
3. METODOLOGI PENELITIAN
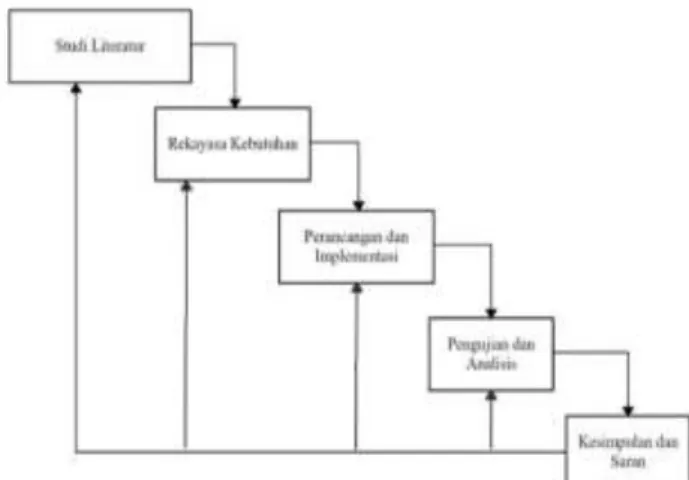
Berdasarkan pada Gambar 2 Metode Penelitian yang terstruktur dibutuhkan tahapan yang sistematis. Hal pertama yang dilakukan adalah mencari studi literatur yang terkait dengan penelitian penulis. Setelah mendapatkan studi literatur, dari sumber yang didapatkan pada studi literature tersebut peneliti dapat melakukan analisa untuk membuat rancangan perangkat keras dan perangkat lunak seperti dengan rancangan yang telah ditentukan. Kemudian dilakukan perancangan sistem agar sistem dapat bekerja sesuai dengan blok diagram yang telah ditentukan, apabila telah selesai dilakukan
implementasi sistem dan pengujian sistem sesuai dengan tujuan dan berlandaskan atas batasan masalah yang ada.
Gambar 2. Alur Metode Penelitian
3.1 Perancangan Sistem
Gambar 3. Perancangan sistem deteksi helm.
Perancangan sistem proses pembuatan model CNN seperti flowchart Gambar 3. Tahap awal dari perancangan sistem deteksi helm adalah program akan melakukan inisialisasi awal dengan melakukan input batch dan epoch sesuai dengan kebutuhan untuk menunjang kebutuhan sistem. Proses image processing dan melakukan proses pelatihan data pada dataset.
Kemudian, program akan mengambil data citra pada dataset yang digunakan yaitu pada sistem deteksi helm ini menggunakan 2000 gambar.
Dataset tersebut diproses untuk mendapatkan hasil dari proses training dan testing. Data gambar yang berjumlah 2000 gambar terdiri dari 2 kelas yaitu 1000 gambar orang menggunakan
Fakultas Ilmu Komputer, Universitas Brawijaya
helm dan 1000 orang tidak menggunakan helm.
Proses training akan selesai apabila epoch telah dilakukan sebanyak 1000, kemudian model akan di simpan dengan format weight.
3.2 Implementasi Sistem
Gambar 4. Rangkaian komponen penyusun sistem Pada tahap ini menjelaskan secara rinci hubungan dari satu komponen dengan komponen lainnya yang mana power bank sebagai input untuk memberi daya pada Raspberry Pi dan webcam camera sebagai input video secara real-time, kemudian Raspberry Pi akan melakukan pengolahan dan pemrosesan data yang keluarannya berupa bunyi buzzer.
Skematik rangkaian masing- masing komponen sistem deteksi helm ini ditunjukkan pada Gambar 4.
4. PENGUJIAN DAN ANALISIS HASIL 4.1 Pengujian hasil akurasi Deteksi Helm.
Tujuan pengujian fungsionalitas kamera yaitu mendapatkan input sesuai dengan masukan yang ada, yaitu berupa citra yang akan digunakan untuk proses deteksi helm. Hasil dari input kamera tersebut akan ditampilkan pada layar monitor pada sistem operasi Raspberry Pi 4. Salah satu gambar terdapat ada object yang tidak terdeteksi, object tersebut tidak terdeteksi dikarenakan waktu komputasi dan hasil gambar yang ada kurang jelas atau blur. Nilai pada persentase deteksi merupakan persentase probabilitas yang terdapat pada program video.py.
Tabel 2 Hasil pengujian akurasi deteksi helm Kelas
Helm Kondisi Kelas
No-helm Kondisi
Pengendara1 Benar Pengendara1 Benar Pengendara2 Benar Pengendara2 Benar Pengendara3 Benar Pengendara3 Benar Pengendara4 Benar Pengendara4 Benar Pengendara5 Benar Pengendara5 Benar Pengendara6 Benar Pengendara6 Benar Pengendara7 Benar Pengendara7 Benar Pengendara8 Benar Pengendara8 Salah Pengendara9 Benar Pengendara9 Benar Pengendara10 Benar Pengendara10 Benar Pengendara11 Benar Pengendara11 Benar Pengendara12 Benar Pengendara12 Benar Pengendara13 Benar Pengendara13 Benar Pengendara14 Benar Pengendara14 Benar Pengendara15 Benar Pengendara15 Salah Pengendara16 Benar Pengendara16 Benar Pengendara17 Benar Pengendara17 Benar Pengendara18 Salah Pengendara18 Benar Pengendara19 Benar Pengendara19 Benar Pengendara20 Benar Pengendara20 Benar Pengendara21 Benar Pengendara21 Benar Pengendara22 Benar Pengendara22 Benar Pengendara23 Benar Pengendara23 Benar Pengendara24 Benar Pengendara24 Benar Pengendara25 Salah Pengendara25 Salah
Berdasarkan pengujian akurasi deteksi helm, hasil dari dua puluh lima pengujian menunjukkan adanya 3 kegagalan. Persentase keberhasilan dari sistem didapati sebesar 90%.
Hasil persentase keberhasilan tersebut dirumuskan dan mendapatkan hasil sebagai berikut:
𝐴𝑐𝑐𝑢𝑟𝑎𝑐𝑦 = 23 + 22
23 + 22 + 3 + 2= 0.90 𝑃𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 = 23
23 + 3 = 0.88 𝑅𝑒𝑐𝑎𝑙𝑙 = 23
23 + 2 = 0.92
4.2 Pengujian rata-rata waktu komputasi Deteksi Helm.
Fakultas Ilmu Komputer, Universitas Brawijaya
as Sebenarnya
Pada pengujian rata-rata waktu komputasi deteksi helm membutuhkan laptop sebagai sarana untuk pembuatan model. Aplikasi yang digunakan untuk menunjang kebutuhan sistem, yakni Pycharm atau google colabs. Model di training selama 1000 iterasi. Diperlukan dataset yang banyak agar menghasilkan model yang maksimal. Pengujian ini bertujuan untuk mengetahui lama waktu komputasi untuk mendapatkan model deteksi helm. Sistem deteksi helm yang di train selama 1000 itrerasi membutuhkan waktu lebih kurang selama 9 jam.
Tabel 3 Pengujian waktu Latih YOLOv3
Percobaan
Iterasi / Epoch
Waktu Latih (menit)
Avg Loss Akurasi Training
1 100 ±57 45.1525 54.84 2 500 ±269 1.6989 98.30 3 1000 ±575 1.7881 98.21
Hasil dari proses pengujian yang telah dilakukan jumlah epoch atau iterasi sebesar 1000 membutuhkan waktu komputasi kurang lebih selama 575 menit. Kemudian didapatkan hasil accuracy sebesar 98,21% nilai akurasi menyatakan nilai akurasi pada training set.
Kemudian untuk nilai avg loss yang didapatkan adalah sebesar 1.7881.
4.3 Pengujian sistem Deteksi Helm dalam menyalakan buzzer
Pada pengujian sistem deteksi helm dalam menyalakan buzzer, kemampuan dari buzzer pada Raspberry Pi 4 sebagai keluaran atau output bagi sistem akan diuji. Buzzer akan aktif pada pengendara yang tidak menggunakan helm (No-Helmet). Tujuan dari pengujian sistem deteksi helm dalam menyalakan buzzer yaitu untuk mendapatkan informasi apabila pengendara tidak menggunakan helm maka buzzer akan aktif sesuai dengan fungsinya. Hasil confusion matriks pengujian buzzer terdapat pada Tabel 4.
Tabel 4 confusion matrix pengujian deteksi helm dalam menyalakan buzzer
Kelas Prediksi
Helmet No-Helmet
Helmet 25 0
No-Helmet 0 25
Berdasarkan pengujian akurasi sistem deteksi helm dalam menyalakan buzzer seperti yang telah di ujikan dilakukan, pada tabel diatas hasil pengujian menunjukkan tidak ada kegagalan dalam menyakajan buzzer.
Pengujian sistem deteksi helm dapat dihitung menggunakan rumus pada persamaan dibawah ini.
𝐴𝑐𝑐𝑢𝑟𝑎𝑐𝑦 = 25 + 25
25 + 25 + 0 + 0= 100%
𝑃𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 = 25
25 + 0 = 100%
𝑅𝑒𝑐𝑎𝑙𝑙 = 25
25 + 0 = 100%
5. KESIMPULAN DAN SARAN 5.1 Kesimpulan
Kesimpulan pada penelitian sistem deteksi helm untuk keamanan pengendara sepeda motor menggunakan Convolutional Neural Network berbasis raspberry pi, yaitu:
1. Implementasi metode Convolutional Neural Network pada penelitian ini dilakukan dengan mendeteksi pengendara yang menggunakan helm dan pengendara yang tidak menggunakan helm. Persentase keberhasilan pada deteksi helm yaitu sebesar 90%.
2. Waktu komputasi sistem deteksi helm membutuhkan waktu yang lama agar mendapatkan hasil model. Agar mendapatkan model yang maksimal dibutuhkan dataset yang banyak, pada sistem deteksi helm menggunakan dataset sebanyak 2000 gambar dan lama waktu proses training dataset yaitu selama kurang lebih 9 jam agar mendapat hasil yang maksimal.
3. Sistem deteksi helm menggunakan buzzer sebagai notifikasi. Saat implementasi buzzer akan menyala jika pengendara tidak menggunakan helm atau dengan
Fakultas Ilmu Komputer, Universitas Brawijaya
status No-Helmet. Persentase keberhasilan pada deteksi helm menggunakan buzzer yaitu sebesar 100%
5.2 Saran
Saran bagi penelitian untuk dapat membuat penelitian lebih optimal berdasarkan kesimpulan yang didapatkan, yaitu:
1. Bagi penelitian berikutnya diharapkan dapat meningkatkan nilai akurasi pada sistem.
2. Bagi penelitian berikutnya diharapkan dapat menambah kelas negative agar sistem lebih baik.
3. Penelitian selanjutnya diharapkan dapat meningkatkan akurasi dari sistem deteksi helm dengan metode yang berbeda.
DAFTAR REFERENSI
Bahtiar. H. (2019). Sistem Pendeteksi Helm yang Dikenakan Pengendara Sepeda Motor Untuk Safety Riding Berbasis RaspberryPi. Jurnal Pengembangan Teknologi Nasional (2019).
Danajaya, D. 2019. Angka kecelakaan Tahun 2019. [online] Avalible at:
https://otomotif.kompas.com/read /2019/09/09/160200815/angka-
kecelakaan-tahun-2019-truk-dan-sepeda- motor-sering-terlibat [Accessed 15 April 2020].
Rahadiansyah, R (2018), Pakai Helm Kualitas Bagus, Risiko Kematian Turun 40%.
[Online].https://oto.detik.com/berita/d- 4342344/pakai-helm-kualitas-bagus- risiko-kematian-turun-40. (Dikases pada 24 Agustus 2020).
Satria, D. (2018). Pengertian dan Kegunaan Pengolahan Citra Digital. [Online]
Available at: https://medium.com/tulisan- ibe/pengertian-dan-kegunaan-
pengolahan-citra-digital-cdf013a39871.
(Dikases pada 29 Agustus 2020).
Sugianto. Setyani.E, Armanto. H. (2019).
Deteksi Alat Pelindung Kepala (Helm) Menggunakan Metode Haar Casade Classifier. Jurnal Pengembangan Teknologi Informasi dan Ilmu Komputer, vol.4, No.1 (2019).
Yudana. (2017). 10 Sistem Operasi Terbaik Untuk Single Board Computer Raspberry
Pi. [Online] Available at:
https://www.yudana.id/daftar-sistem- operasi-untuk-perangkat-raspberry-pi/.
(Dikases pada 21 Agustus 2020).