IKAT PINGGANG PENDETEKSI HALANGAN DAN PENUNTUN ARAH BERBASIS APLIKASI ANDROID
LAPORAN TUGAS AKHIR
HENDRIK I ZALUKHU 152408041
PROGRAM STUDI D-3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
IKAT PINGGANG PENDETEKSI HALANGAN DAN PENUNTUN ARAH BERBASIS APLIKASI ANDROID
LAPORAN TUGAS AKHIR
DIAJUKAN UNTUK MELENGKAPI TUGAS DAN MEMENUHI SYARAT MEMPEROLEH GELAR AHLI MADYA
HENDRIK I ZALUKHU 152408041
PROGRAM STUDI D-3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
PERNYATAAN ORISINALITAS
IKAT PINGGANG PENDETEKSI HALANGAN DAN PENUNTUN ARAH BERBASIS APLIKASI ANDROID
LAPORAN TUGAS AKHIR
Saya menyatakan bahwa laporan tugas akhir ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 24 Juli 2018
Hendrik I Zalukhu 152408041
Hendrik I Zalukhu
IKAT PINGGANG PENDETEKSI HALANGAN DAN PENUNTUN ARAH BERBASIS APLIKASI ANDROID
ABSTRAK
Penemuan dalam berbagai teknologi sensor dalam HCSR bluetooth module HC 04 dan 05 dan globalsistem pemosisian (GPS) pada smartphone Android, tetapipenggunaannya tidak dimaksimalkan. Penulis mencoba menerapkanHCSR sensor 04 sebagai deteksi hambatan pada orang buta saat berjalan dan modul HC 05 berfungsi sebagai penghubungalat dengan smartphone android yang juga berfungsi sebagai saluran informasi lokasi menggunakan GPS blind in soundkeluaran.
Mengukur jarak secara manual menggunakan hasil 83,33% aturan yang sebanding dengan yangdibaca oleh sensorKoneksi HCSR 04 bluetooth menggunakan modul bluetooth HC05 memiliki jarak maksimum 18 meter. MenggunakanGPS lebih efektifdigunakan dalam kondisi cuaca cerah dengan pengambilan data rata-rata 2,3 detikdan dalamkeadaan istirahat dengan waktu 2,6 detik.
Kata Kunci:Android, Modul Bluetooth HC05,Orang Buta,Sensor HCSR 04.
DETECTOR OBSTRUCTION AND DIRECTION GUIDES BASED ON ANDROID APLICATIONS
ABSTRACT
Discoveries in a variety of sensor technologies in such HCSR bluetooth module HC 04 and 05 and global positioning system (GPS) on the Android smartphone, but the use is not maximized. The author tries to apply HCSR sensor 04 as an obstacle detection at blindman when walking and HC module 05 serves as a liaison tool with android smartphone that also serves as a conduit of location information using GPS blind in sound output. Measuring distance manually using the results 83.33% rule comparable to that read by the sensor HCSR 04 bluetooth connection using bluetooth module HC 05 has a maximum distance of 18 meters.
The use of GPS is more effectively used in sunny weather conditions with averaged data retrieval 2.3 second and in a state of rest with a time of 2.6 second.
Keyword : Android, Modul Bluetooth HC05, Sensor HCSR 04, Blindman
PENGHARGAAN
Puji dan syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa karena Rahmat dan Kasih Sayang-Nya penulis dapat menyelesaikan Laporan Tugas Akhir ini dengan baik dan tepat pada waktunya.
Dalam menyelesaikan Laporan Proyek ini, penulis banyak mendapatkan bantuan dan bimbingan dari berbagai pihak. Oleh karena itu pada kesempatan kali ini penulis mengucapkan terima kasih kepada :
1. Bapak Drs. Kerista Sebayang, M.S selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Drs. Takdir Tamba, M.Sc selaku Ketua Jurusan Program Studi D3 Fisika FMIPA USU.
3. Bapak Drs, Aditia Warman, M.Si Selaku Sekretaris Jurusan Program Studi D3 FMIPA USU.
4. Ibu Dr. Diana Alemin Barus, M.Sc Selaku pembimbing pada penyelesaian Laporan Proyek ini yang telah memberikan panduan dan penuh kepercayaan kepada saya untuk menyempurnakan kajian ini.
5. Kedua Orang Tua Penulis yang telah memberikan dukungan kepada saya, baik moril maupun materil.
6. Seluruh keluarga besar penulis dimanapun berada yang telah memberikan dukungan penuh kepada penulis.
7. Seluruh rekan-rekan Mahasiswa D3 Fisika yang telah banyak membantu penulis.
8. Seluruh sahabat penulis yang telah memberikan dukungan positif kepada penulis dalam menyelesaikan semuanya.
Serta ucapan khusus terutama bagi orang-orang yang penulis kasihi yang juga mendukung penulis baik langsung ataupun tidak langsung dalam bentuk moril maupun materil serta doa restu yang ditujukan kepada penulis, sehingga Laporan Tugas Akhir ini dapat diselesaikan.
Sepenuhnya penulis menyadari bahwa dalam menyelesaikan Laporan Tugas Akhir ini, masih terdapat banyak kekurangan-kekurangan yang harus dipenuhi.
Untuk itu penulis mengharapkan saran dan kritik yang bersifat kritik dan saran yang membangun dari para pembaca, dimana saran dan kritik tersebut dapat dimanfaatkan untuk kemajuan pengetahuan pada saat ini dan di masa mendatang.
Semoga Laporan Tugas Akhir saya ini berguna bagi pembaca, akhir kata penulis mengucapkan banyak terima kasih.
Medan, 24 Juli 2018
Hendrik I Zalukhu
DAFTAR ISI
PERNYATAAN ... i
PENGESAHAN LAPORAN TUGAS AKHIR ... ii
ABSTRAK ... iii
ABSTRACT ... iv
PENGHARGAAN ... v
DAFTAR ISI ... vii
DAFTAR GAMBAR ... ix
DAFTAR TABEL... x
BAB 1 PENDAHULUAN... 1
1.1 LatarBelakang……….. .. 1
1.2 RumusanMasalah... 2
1.3 BatasanMasalah... 2
1.4 TujuanPenulisan... 2
1.5 SistematikaPenulisan………... 3
BAB 2 TINJAUAN PUSTAKA... 4
2.1 Sensor ... 4
2.1.1 Sensor Ultrasonik HC-SR04 ... 4
2.2 Mikrokontroller……… . 6
2.2.1 MikrokontrollerATMega 328P ... 7
2.2.2 Bahasa C……… 10
2.3 LCD(Liquid Crystal Display)………... 11
2.3.1 Cara Kerja Lcd……...………...………... 13
2.4 Modul Bluetooth HC-05..…………...…………....………... 14
BAB 3 PERANCANGAN ALAT... 16
3.1 Diagram blok .…… ... ... 16
3.2 Perancangan Rangkaian Elektronik. ... ... 17
3.3 Rangkaian Sensor Ultrasonik ... ... 17
3.4 Display LCD ... ... 18
3.5 Rangkaian Catu Daya. ... ... 18
3.6 Proses Perancangan Alat ... ... 19
3.7 Flowchart Sistem ... ... 21
3.8 Rangkaian Keseluruhan...……….... .. 22
BAB 4 PENGUJIAN ALAT DAN PROGRAM... 23
4.1 Implementasi Sistem ... .. 23
4.2 Pengujian Sensor Ultrasonik HC-SR04 ... .. 24
4.3 Pengujian dan Analisa modul Bluetooth HC-05 ... .. 26
4.4 Pengujian Mikrokontroller ... .. 26
4.5 Pengujian LCD………...………….…………. 27
4.6 Pengujian Rangkaian Keseluruhan………..………….. … 28
BAB 5 KESIMPULAN DAN SARAN... 34
5.1 Kesimpulan………... 34
5.2 Saran………...………... 34
DAFTAR PUSTAKA... 35 LAMPIRAN
DAFTAR GAMBAR
Nomor Gambar Judul Halaman
Gambar 2.1 Sensor Ultrasonic HC-SR04 4
Gambar 2.2 Prinsip Kerja Sensor Ultrasonik 5
Gambar 2.3 Sistem Pewaktu pada Sensor HC-SR04 6
Gambar 2.4 Sistem Minimum. 6
Gambar 2.5 Rangkaian Sistem Minimum 7
Gambar 2.6 AtMega 328P 8
Gambar 2.7 Pin-pin ATMega32 10
Gambar 2.8. LCD (Liquid Crystal Display) 12
Gambar 2.9. HC-05 Bluetooth module 15
Gambar 3.1 Diagram Blok Rangkaian 16
Gambar 3.2 Rangkaian Sensor Ultrasonik 17
Gambar 3.3 Rangkaian LCD 18
Gambar 3.4 Rangkaian Catu Daya 19
Gambar 3.5 Flowchart Sistem 21
Gambar 3.6 Rangkaian Keseluruhan 22
Gambar 4.1 Hardware Kepala Ikat Pinggang Elektronik 23
Gambar 4.2 Program sensor ultrasonik 24
Gambar 4.3 Hasil Monitoring Sensor pada port COM 3 25
Gambar 4.4 Program Mikrokontroller 27
Gambar 4.5 Rangkaian pengujian Mikrokontroller ATMega 328P 27
Gambar 4.6 Program LCD yang diberikan pada Mikrokontroller 28
Gambar 4.7 Hasil Pengujian LCD display 28
Gambar 4.8 Program rangkaian keseluruhan 33
DAFTAR TABEL
Nomor Tabel Judul Halaman
Tabel 2.1 Fungsi pin-pin lcd 12
Tabel 4.1 Hasil Pembacaan Sensor 25
Tabel 4.2 Pengujian modul Bluetooth 26
Tabel 4.3 Hasil Pengujian Seluruh rarengkaian 33
BAB 1 PENDAHULUAN
1.1 Latar belakang
Sensor Ultrasonik merupakan rangkaian elektronik yang masih asing ditelinga masyarakat awam.Akan tetapi bagi kalangan mahasiswa sensor ultrasonik sering kali digunakan untuk berbagai inovasi peralatan pembantu pekerjaan manusia seperti sensor ketinggian air dan sensor jarak pada robotika dan lain-lain.Karena kegunaannya yang besar tersebut penulis ingin sekali membuat rancangan peralatan yang dapat diaplikasikan langsung pada tubuh manusia.Bentuk alat yang berupa ikat pinggang (sabuk) akan membuat nyaman dalam pemakaian ikat pinggang ultrasonik ini akan diaplikasikan untuk penyandang turnanetra.
Penyandang tunanetra akan sangat terbantu karena akan lebih mudah dalam mengenali objek yang ada didepannya tanpa menggunakan indera penglihatan yang merupakan kekurangan yang dia miliki.Sabuk ini dirancang melalui aplikasi Bluetooth yang akan memberikan informasi hambatan dan informasi tentang daerah sekitar tunanetra melalui smarthphone tersebut.Tujuan kerja ikat pinggang (sabuk) ultrasonik ini adalah untuk memudahkan penyandang tunanetra dalam berjalan sehingga tidak perlu menggunakan tongkat kayu lagi.Dengan menggunakan sensor ultrasonik benda yang berbentuk kotak,segitiga maupun lingkaran akan dapat diketahui oleh penyandang tunanetra.Jarak benda juga dapat diidentifikasikan dengan alat ini.Output sensor nantinya akan diroses menggunakan mikrokontroler dan akan diproses lagi menjadi sinyal-sinyal suara yang dapat dimengerti oleh penyandang tunanetra.
Sebelumnya sudah ada teknologi semacam ini seperti tongkat dan kacamata ultrasonik.Baik itu tongkat dan kacamata ultrasonik tersebut masih terdapat kekurangan seperti sinyal suara yang menggunakan buzzer yang susah dimengerti oleh pemakai.Alat yang saya buat ini mempuunyai suatu kelebihan yaitu dapat memberikan informasi suara kepada tunanetra melalui smartphone tersebut dapat mudah mengetahui tentang daerah sekitar tunatera tersebut dan dapat sebagai penuntun tunanetra untuk melakukan aktifitasnya seperti berjalan dan lain-lain.
1.2 Rumusan Masalah
Keinginan penyandang tunanetra untuk mandiri tanpa bantuan dari orang lain dalam kehidupannya sehari-hari seperti berjalan ke suatu tempat dengan rasa nyaman dan aman masih merupakan sebuah impian saja.Untuk dapat mewujudkan impian tersebut penulis berusaha membuat aksesoris berupa ikat pinggang (sabuk) ultrasonik yang akanmenuntun penyandang tunanetra saat berjalan.Alat ini akan mengeluarkan petunjuk berupa suara yang mudah dimengerti oleh penyandang tunanetra dan untuk memudahkan menentukan arah dia berjalan.Alat ini juga dapat diatur tingkat kesensitifannya dalam mengidentifikasi benda didepannya.Maka penulis tertarik untuk membuat suatu alat dengan judul“IKAT PINGGANG PENDETEKSI HALANGAN DAN PENUNTUN ARAH BERBASIS ANDROID”.
Pada alat ini akan digunakan sebuah sensor infrared,sebuah mikrokontroler ATMega 328 yang berfungsi untuk mengontrol dan membaca data.
1.3 Batasan Masalah
Pembatasan masalah dalam Tugas Akhir ini hanya mencakup beberapa point
utama, diantaranya adalah sebagai berikut:
1. Bagaimana membantu tunanetra untuk menghindari ritangan yang berada dihadapatannya..
2. Mikrokontroller yang digunakan adalah ATMega 328 yang hanya difungsikan sebagai pengontrol dari tegangan yang masuk.
3. Memanfaatkan suara ultrasonic sebagai pendeteksi halangan dan bluetoth untuk komunikasi ke handphone android.
1.4 Tujuan Penulisan
Tujuan pembuatan alat ini adalah untuk menciptakan alat yang mampu membantu tunanetra dalam mendeteksi halangan yang ada dihadapannya.
1.5. Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman penulis membuat
sistematika penulisan bagaimana sebenarnya prinsip kerja dari alat IKAT PINGGANG PENDETEKSI RINTANGAN DAN PENUNTUN ARAH BERBASIS ANDROID,dengan sitematika penulisan sebagai berikut:
BAB I : PENDAHULUAN
Berisi latar belakang permasalahan, rumusan masalah, batasan masalah, tujuan, sistematika penulisan dari penulisan tugas akhir ini.
BAB II : LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu antara lain tentang Mikrokontroler Atmega 328, sensor ultrasonic, Bluetooth hc-05, bahasa program yang dipergunakan, serta cara kerja dari mikrokontroler Atmega 32 dan komponen pendukung.
BAB III : PERANCANGAN SISTEM
Membahas tentang perencanaan dan pembuatan system secara keseluruhan.
BAB IV : PENGUJIAN RANGKAIAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat.dll.
BAB V : KESIMPULAN DAN SARAN
Merupakankesimpulan dari pembahasan pada bab-bab sebelumnya dan kemungkinan pengembangan alat.
BAB 2
TINJAUAN PUSTAKA
2.1 Sensor
Sensor adalah transduser yang berfungsi untuk mengolah variasi gerak, panas, cahaya atau sinar, magnetis, dan kimia menjadi tegangan serta arus listrik.
Transduser sendiri memiliki arti mengubah, resapan dari bahasa latin traducere Bentuk perubahan yang dimaksud adalah kemampuan merubah suatu energi kedalam bentuk energi lain. Sensor yang sering menjadi digunakan dalam berbagai rangkaian elektronik antara lain sensor cahaya atau sinar, sensor suhu, serta sensor tekanan.
2.1.1 Sensor Ultrasonik HCSR04
Sensor jarak ultrasonic HC-SR04 adalah sensor 40 KHz. HC-SR04 merupakan sensor ultrasonik yang dapat digunakan untuk mengukur jarak antara penghalang dan sensor. Konfigurasi pin dan tampilan sensor HC-SR04 diperlihatkan pada gambar 2.1.
Gambar 2.1. Sensor Ultrasonic HC-SR04
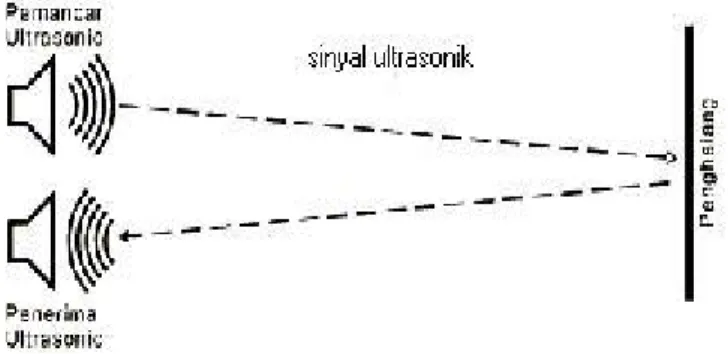
HC-SR04 memiliki 2 komponen utama sebagai penyusunnya yaitu ultrasonic transmitter dan ultrasonic receiver. Fungsi dari ultrasonic transmitter adalah memancarkan gelombang ultrasonik dengan frekuensi 40 KHz kemudian ultrasonic receiver menangkap hasil pantulan gelombang ultrasonik yang mengenai suatu objek. Waktu tempuh gelombang ultrasonik dari pemancar hingga sampai ke
penerima sebanding dengan 2 kali jarak antara sensor dan bidang pantul seperti yang diperlihatkan pada gambar 2.2.
Gambar 2.2 Prinsip Kerja Sensor Ultrasonik
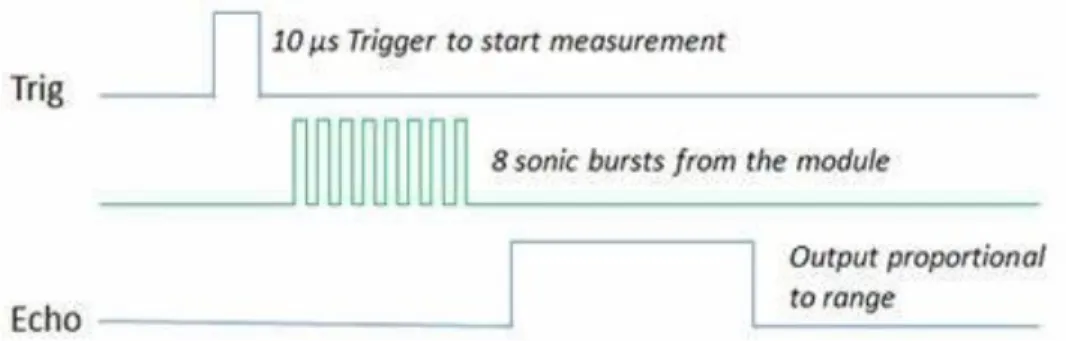
Prinsip pengukuran jarak menggunakan sensor ultrasonik HC-SR04 adalah ketika pulsa trigger diberikan pada sensor, transmitter akan mulai memancarkan gelombang ultrasonik, pada saat yang sama sensor akan menghasilkan output TTL transisi naik menandakan sensor mulai menghitung waktu pengukuran, setelah receiver menerima pantulan yang dihasilkan oleh suatu objek maka pengukuran waktu akan dihentikan dengan menghasilkan output TTL transisi turun. Jika waktu pengukuran adalah t dan kecepatan suara adalah 340 m/s, maka jarak antara sensor dengan objek dapat dihitung dengan menggunakan Persamaan:
s = 𝑡 𝑥 340 𝑚/𝑠 Dimana : s = Jarak antara sensor dengan objek (m)
t = Waktu tempuh gelombang ultrasonik dari transmitter ke receiver (s) Prinsip pengoperasian sensor ultrasonik HC-SR04 adalah sebagai berikut awali dengan memberikan pulsa Low (0) ketika modul mulai dioperasikan, kemudian berikan pulsa High (1) pada trigger selama 10 µs sehingga modul mulai memancarkan 8 gelombang kotak dengan frekuensi 40 KHz, tunggu hingga transisi naik terjadi pada output dan mulai perhitungan waktu hingga transisi turun terjadi, setelah itu gunakan Persamaan 2.2 untuk mengukur jarak antara sensor dengan objek.
Timing diagram pengoperasian sensor ultrasonik HC-SR04 diperlihatkan pada gambar 2.3.
Gambar 2.3 Sistem Pewaktu pada Sensor HC-SR04
2.2 Mikrokontroller
Mikrokontroler adalah mikroprosesor yang telah dilengkapi dengan memori, IO, dan peripheral dalam satu chip [1]. Dengan kelengkapan tersebut sebuah mikrokontroler dapat melakukan komputasi juga pegontrolan suatu sistem secara mandiri . Namun diperlukan rangkaian tambahan untuk melakukan eksekusi program yang ada di dalam mikrokontroler tersebut. Rangkaian ini biasa disebut dengan rangkaian sistem minimum mikrokontroler.
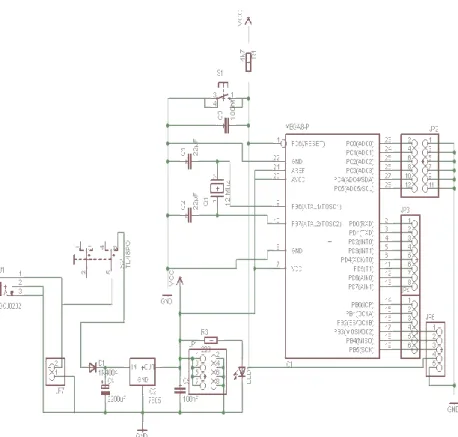
Sistem minimum atau yang biasa disingkat sismin. Merupakan suatu rangkaian dasar pada rangkaian mikrokontroler yang merupakan syarat minimum dari suatu mikrokontroler untuk bekerja. Rangkaian sistem minimum pada dasarnya terdiri dari komponen kristal, kapasitor nonpolar dan rangkaian suplai tegangan.
Gambar 2.4 Sistem Minimum
Gambar 2.5 Rangkaian Sistem Minimum
Rangkaian sistem minimum berfungsi sebagai pengatur clock pada mikrokontroler.
Rangkaian ini sebagai rangkaian penabuh yang digunakan untuk satuan frekuensi pada mikrokontroler. Juga berfungsi sebagai rangkaian minimum untuk melakukan pemrograman mikrokontroler. Komponen yang berfungsi untuk membangkitkan frekuensi ini adalah komponen kristal. Ada berbagai tipe mikrokontroler yang beredar di pasaran, dalam tugas akhir ini digunakan mikrokontroler ATmega 328P.
2.2.1 Mikrokontroller ATMega 328
Mikrokontroller ATmega 328 adalah mikrokontroler yang diproduksi oleh Atmel. mikrokontroler ini mempunyai ukuran flash memori yang cukup besar, memiliki clock dan kerjanya tinggi sampai 16 MHz,kapasistas SRAM sebesar 2 KiloByte, 32 buah port I/O yang sangat memadai untuk berinteraksi dengan LCD dan keypad.
Gambar 2.6 ATMega 328
a. Arsitektur CPU ATMega 328
Fungsi utama CPU adalah memastikan pengeksekusian instruksi dilakukan dengan benar. Oleh karena itu CPU harus dapat mengakses memori, melakukan kalkulasi, mengontrol peripheral, dan menangani interupsi. Ada 32 buah General Purpose Register yang membantu ALU bekerja. Untuk operasi aritmatika dan logika, operand berasal dari dua buah general register dan hasil operasi ditulis kembali ke register.
Status and Control berfungsi untuk menyimpan instruksi aritmatika yang baru saja dieksekusi. Informasi ini berguna untuk mengubah alur program saat mengeksekusi operasi kondisional. Instruksi di jemput dari flash memory. Setiap byte flash memory memiliki alamat masing-masing. Ketika terjadi interupsi atau pemanggilan rutin biasa, alamat di Program Counter disimpan terlebih dahulu di stack. Alamat interupsi atau rutin kemudian ditulis ke Program Counter, instruksi kemudian dijemput dan dieksekusi. Ketika CPU telah selesai mengeksekusi rutin interupsi atau rutin biasa, alamat yang ada di stack dibaca dan ditulis kembali ke Program Counter.
b. Program Memori
ATMega 328 memiliki 32 KiloByte flash memori untuk menyimpan program.Karena lebar intruksi 16 bit atau 32 bit maka flash memori dibuat berukuran 16K x 16.
Artinya ada 16K alamat di flash memori yang bisa dipakai dimulai dari alamat 0 heksa sampai alamat 3FFF heksa dan setiap alamatnya menyimpan 16 bit instruksi.
c. SRAM Data Memori
ATMega 328 memiliki 2 KiloByte SRAM. Memori ini dipakai untuk menyimpan variabel. Tempat khusus di SRAM yang senantiasa ditunjuk register SP disebut stack. Stack berfungsi untuk menyimpan nilai yang dipush.
d. EEPROM Data Memori
ATMega 328 memiliki 1024 byte data EEPROM. Data di EEPROM tidak akan hilang walaupun catuan daya ke sistem mati. Parameter sistem yang penting disimpan di EEPROM. Saat sistem pertama kali menyala paramater tersebut dibaca dan system diinisialisasi sesuai dengan nilai parameter tersebut.
e. Interupsi
Sumber interupsi ATMega 328 ada 21 buah. Tabel 2 hanya menunjukkan 10 buah interupsi pertama. Saat interupsi diaktifkan dan interupsi terjadi maka CPU menunda instruksi sekarang dan melompat ke alamat rutin interupsi yang terjadi. Setelah selesai mengeksekusi intruksi-instruksi yang ada di alamat rutin interupsi CPU kembali melanjutkan instruksi yang sempat tertunda.
f. I/O Port
ATMega 328 memiliki 32 buah pin I/O. Melalui pin I/O inilah ATMega 328 berinteraksi dengan sistem lain. Masing-masing pin I/O dapat dikonfigurasi tanpa mempengaruhi fungsi pin I/O yang lain. Setiap pin I/O memiliki tiga register yakni:
DDxn, PORTxn, dan PINxn. Kombinasi nilai DDxn dan PORTxn menentukan arah pin I/O.
g. Clear Time On Compare Match (CTC)
CTC adalah salah satu mode Timer/Counter1, selain itu ada Normal mode, FastPWM mode, Phase Correct PWM mode. Pada CTC mode maka nilai TCNT1 menjadi nol jika nilai TCNT1 telah sama dengan OCR1A atau ICR1. Jika nilai top ditentukan OCR1A dan interupsi diaktifkan untuk Compare Match A maka saat nilai TCNT1
sama dengan nilai OCR1A interupsi terjadi. CPU melayani interupsi ini dan nilai TCNT1 menjadi nol.
h. USART
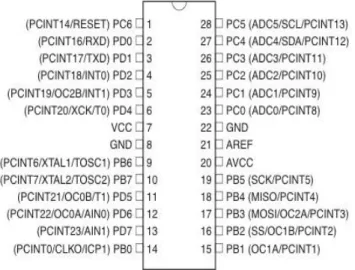
Selain untuk general I/O, pin PD1 dan PD0 ATMega 328 berfungsi untuk mengirim dan menerima bit secara serial. Pengubahan fungsi ini dibuat dengan mengubah nilai beberapa register serial. Untuk menekankan fungsi ini, pin PD1 disebut TxD dan pin PD0 disebut RxD. Gambar diatas menunjukkan bentuk frame yang dimiliki ATMega 328. Nilai UBRR dan clock sistem menentukan laju bit pengirim dan penerima serial. Berikut gambar konfigurasi pin Mikrokontroler AVR ATMega 328.
Gambar 2.7 Pin-pin ATMega32
2.2.2 Bahasa C
Bahasa C adalah bahasa pemrograman yang digunakan pada software CodeVision AVR. Bahasa pemrograman ini yang dapat dikatakan berada antara bahasa tingkat rendah (bahasa yang berorientasi pada mesin) dan bahasa tingkat tinggi (bahasa yang berorientasi pada manusia). Seperti yang diketahui, bahasa tingkat tinggi mempunyai kompatibilitas antara platform dan karenanya amat mudah untuk membuat program pada berbagai mesin. Berbeda dengan menggunakan bahasa mesin, sebab setiap perintahnya sangat bergantung pada jenis mesin.
Pembuat bahasa C adalah Brian W. Kernighan dan Dennis M. Ritchie pada tahun 1972. Bahasa C adalah bahasa pemrograman terstruktur, yang membagi programnya dalam bentuk blok. Tujuannya untuk memudahkan dalam pembuatan dan pengembangan program. Program yang ditulis dengan bahasa C mudah sekali dipindahkan dari satu jenis program ke bahasa program lain. Hal ini karena adanya standarisasi bahasa C berupa standar ANSI (American National Standard Institute) yang dijadikan acuan oleh para pembuat kompiler jenis mesin.
Kelebihan Bahasa C:
a. Bahasa C tersedia hampir di semua jenis komputer.
b. Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis komputer.
c. Bahasa C hanya menyediakan sedikit kata-kata kunci hanya terdapat 32 kata kunci.
d. Proses executable program bahasa C lebih cepat e. Dukungan pustaka yang banyak.
f. C adalah bahasa yang terstruktur Kekurangan Bahasa C:
a. Banyaknya operator serta fleksibilitas penulisan program kadang-kadang membingungkan pemakai.
b. Bagi pemula pada umumnya akan kesulitan menggunakan pointer.
2.3 LCD(Liquid Crystal Display)
Liquid Crystal Display (LCD) adalah komponen yang dapat menampilkan tulisan. Salah satu jenisnya memiliki dua baris dengan setiap baris terdiri atas enam belas karakter. LCD seperti itu biasa disebut LCD 16x2.
Gambar 2.8 LCD (Liquid Crystal Display)
LCD memiliki 16 pin dengan fungsi pin masing-masing seperti yang terlihat pada table berikut:
No.Pin Nama Pin I/O Keterangan
1 VSS Power Catu daya, ground (0v) 2 VDD Power Catu daya positif 3
V0 Power
Pengatur kontras, menurut datasheet, pin iniperlu dihubungkan dengan pin vss melalui resistor Variabel.
4 RS Input
Register Select
RS = HIGH : untuk mengirim data
RS = LOW : untuk mengirim instruksi
5 R/W Input Read/Write control bus R/W = HIGH : mode untuk membaca data di LCD
Tabel 2.1 Fungsi pin-pin lcd
2.3.1 Cara kerja LCD
Pada aplikasi umumnya RW diberi logika rendah “0”.Bus data terdiri dari 4bit atau 8 bit. Jika jalur data 4 bit maka yang digunakan ialah DB4 sampai dengan DB7. Sebagaimana terlihat pada table deskripsi, interface LCD merupakan sebuah parallel bus, dalam hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8bit dikirim ke LCD secara 4bit atau 8bit pada satu waktu
Jika mode 4bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8bit (pertama dikirim 4bit MSB lalu 4bit LSB dengan pulsa clock EN setiap nibblenya). Jalur control EN digunakan untuk memberitahu LCD bahwa mikrokontroler mengirimkan data ke LCD. Untuk mengirim data ke LCD program harus menset EN ke kondisi high “1” dan kemudian menset dua jalur control lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus. Saat jalur lainnya sudah siap, EN harus diset ke “0” dan tunggu beberapa saat, dan set EN kembali ke high
“1”. Ketika jalur RS berada dalam kondisi low “0”, data yang dikirimkan ke LCD dianggap sebagai sebuah perintah atau instruksi khusus (seperti bersihkan layar, posisi kursor dll). Ketika RS dalam kondisi high atau “1”, data yang dikirimkan adalah data ASCII yang akan ditampilkan dilayar.
Misal, untuk menampilkan huruf “A” pada layar maka RS harus diset ke “1”.
Jalur control R/W harus berada dalam kondisi low (0) saat informasi pada data bus akan dituliskan ke LCD. Apabila R/W berada dalam kondisi high “1”, maka program akan melakukan query data dari LCD. Instruksi pembacaan hanya satu, yaitu Get LCD status, lainnya merupakan instruksi penulisan, Jadi hamper setiap aplikasi yang menggunakan LCD, R/W selalu di set ke “0”. Jalur data dapat terdiri 4 atau 8 jalur.Mengirimkan data secara parallel baik 4bit atau 8bit merupakan 2 mode operasi primer.
Untuk membuat sebuah aplikasi interface LCD, menentukan mode operasi merupakan hal yang paling penting. Mode 8bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/0 (3pin untuk control, 8pin untuk data).Sedangkan mode 4bit minimal hanya membutuhkan 7bit (3pin untuk control, 4 pin untuk data). Bit RS digunakan untuk memilih apakah data atau instruksi yang akan ditransfer antara
mikrokontroler dan LCD. Jika bit ini diset (RS = 1), maka byte pada posisi kursor LCD saat itu dapat dibaca atau ditulis. Jika bit ini di reset (RS = 0), merupakan instruksi yang dikirim ke LCD atau status eksekusi dari instruksi terakhir yang dibaca.
2.4 Modul Bluetooth HC-05
Bluetooth adalah sebuah teknologi nirkabel dengan menggunakan media gelombang radio yang bekerja pada frekuensi 2.4 GHz. Buetooth menggunakan sistem Frequency Hopping Spread Spectrum (FHSS) yang mempunyai kecepatanmaksimum 1 Mbps. Bluetooth terbagi menjadi 2 kelas yaitu kelas 1 yang mempunyai jangkauan maksimum kurang lebih100 m dan kelas 2 mempunyai jangkauan maksimum 15 m. Pada jangkauan maksimum yang tidak terlalu luas, bluetooth kemudian dipromosikan dalam personal area netrwork (PAN)[7] . Module Bluetooth adalah suatu perangkat yang berfungsi sebagai media penghubung antara smartphoneAndroid dengan mikrokontroller yang sudah tertanam modul Bluetoothtersebut. Modul bluetoothseri HC memiliki banyak jenis atau varian, yang secara garis besar terbagi menjadi dua yaitu jenis „industrial series‟yaitu HC-03 dan HC-04 serta „civil series‟ yaitu HC-05 dan HC-06. Modul Bluetoothserial,yang selanjutnya disebut dengan modul BT saja digunakan untuk mengirimkan data serial TTL via bluetooth. Modul BT ini terdiri dari dua jenis yaitu Master dan Slave.Modul Bluetooth HC-05 merupakan modul Bluetooth yang banyak digunakan dalam system mikrokontroler. Disamping mudah digunakan , modul ini juga memiliki harga yang cukup murah. Dalam pembuatan alat ini bluetoth digunakan untuk mengirim data dari alat ke android. Modul ini menjadi penting dikarenakan menjadi bahan utama untuk melakukan komunikasi alat denga perangkat android. Dalam penggunaannya , modul ini harus di lakukan pemasangan terlebih dahulu dengan android untuk kemudian komunikasi dapat dilakukan. Modul ini dapat dilihat pada gamabar 2.4.
Gambar 2.9 HC-05 Bluetooth module
BAB 3
PERANCANGAN ALAT
3.1 Diagram Blok Rangkaian
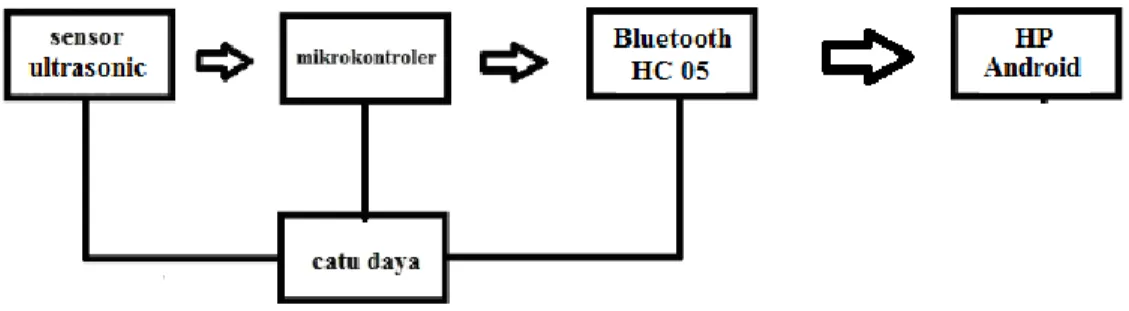
Diagram blok memrupakan salah satu cara yang paling sederhana untuk menjelaskan cara kerja dari suatu system. Dengan diagram blok kita dapat menganalisa cara kerja rangkaian dan merancang hardware yang akan dibuat secara umum. Sistem yang digunakan pada rancangan alat ini dapat dilihat pada gambar 3.1
Gambar 3.1 Diagram Blok Rangkaian Berikut deskripsi fungsi setiap blok :
1 Blok Sensor Ultrasonik : sensor ultrasonik akan mendeteksi input yang
menghalangi sensor ultrasonik,dan output sensor akan masuk ke mikrokontroler.
2. Blok Mikrokontroler : mikrokontroler akan mengolah output sensor
ultrasonik tersebut dan mikrokontroller mengirim data tersebut ke Bluetooth HC 05.
3. Blok Bluetooth HC 05 : data yang dikirm mikrokontroller akan dikoneksikan melalui bluetooth hc 05 ke hp(android) .
4. Blok HP(Android) : hp(Android) akmengeluarkan sinyal berupa suara yang terkoneksi antara Bluetooth hc 05 dan android.
5. Blok Catu Daya : catu daya sebagai sumber arus untuk menjalankan alat tersebut.
3.2 Perancangan Rangkaian Elektronik
Dalam pembuatan alat secara keseluruhan, sebelumnya akan dirancang beberapa rangkaian yang dapat terkoneksi dengan mikrokontroler sebagai otak dari sistem ini agar sistem dapat berjalan dengan efisien, yaitu sensor ultrasonik, catu daya,lcd,modul bluetooth hc 05.
3.2.1 Rangkaian Sensor Ultrasonik
Rangkaian sensor ultrasonic terdiri atas rangkaian pemancar dan rangkaian penerima. Rangkaian pemancar akan mengubah gelombang listrik menjadi gelombang suara ultrasonic kemudian pada bagian penerima sinyal suara ultrasonic tadi akan diubah kembali kedalam sinyal listrik. Kemudian akan dilakukan kalkulasi hasil panjang gelombang dengan waktu tempuh untuk mendapatkan nilai jarak sensor dari titik pantul. Rangkaian sensor ultrasonic dapat dilihat pada gambar 3.2
Gambar 3.2 Rangkaian Sensor Ultrasonic
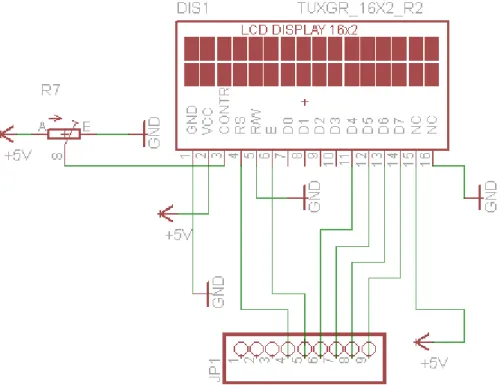
3.2.2 Display LCD
LCD yang digunakan adalah LCD karakter 16x2, mampu menampilkan angka, huruf, dan symbol sebanyak 2 baris dan setiap mampu menampilkan 16 karakter. Dan TRIM digunkan sebagai pengatur kecerahan backlight LCD. Pin RS,RW,E,D4,D5,D6, dan D7 terhubung langsung ke Mikrokontroler
Gambar 3.3 Rangkaian LCD
3.2.3 Perangkaian Catu Daya
Rangkaian ini berfungsi untuk mensupplay tegangan keseluruh rangkaian yang ada. Rangkaian Catu daya (Power Supply Adaptor) ini terdiri dari satu keluaran, yaitu 5 volt. Keluaran 5 volt digunakan untuk mensupplay tegangan ke rangkaian mikrokontroller AVR Atmega 328P ,sensor kelembaban dan LCD.Rangkaian catu daya ditunjukkan pada gambar 3.2 berikutini:
Gambar 3.4 Rangkaian Catu Daya
3.3 Proses Perancangan Alat
Tahap terpenting dalam pembuatan suatu alat adalah perancangan.Hal- hal yang perlu diperhatikan dalam perancangan suatu alat meliputi prinsip kerja rangkaian, spesifikasi komponen yang terdapat pada rangkaian sehingga tidak terjadi kerusakan pada saat pemasangan komopnen.Tujuan perancangan adalah untuk memudahkan dalam pembuatan suatu alat serta mendapatkan suatu alat yang baik seperti yang diharapkan dengan memperhatikan penggunaan komponen dengan harga ekonomis serta mudah didapat dipasaran. Selain itu, itu perancangan juga bertujuan untuk membuat solusi dari suatu permasalahan dengan penggabungan prinsip- prinsip elektronik dan mekanik, serta dengan literatur dengan produk yang ada. Faktor keberhasilan dalam perancangan alat“Ikat Pinggang Pendeteksi Halangan dan Penuntun Arah Berbasis Android” yaitu:
a) Proses Pengerjaan
1. Proses pembuatan krontruksi alat
- Memilih bahan ikat pinggang yang berkualiatas tinggi dan nyaman dipakai.
- Pembuatan casing ikat pinggang sesuai desain.
- Pemasangan 3 sensor yang dihubungkan ke port B rangakain,
- Pemasangan modul Bluetooth HC-05 dan menghubungkannya ke Port bluetooth
rangkain.
- Pemasangan potensiometer - Pemasangan baterai 9V - Pemasang saklar.
- Pemasangan LCD.
2. Proses Pemograman mikrokontroller dengan pembacaan sensor yang berjarak dari0- 30 cm.
b)Optimalisasi Rancangan
Untuk mendapatkan optimalisasi dalam pelaksanaan pembuatan rancangan ikat pinggang tersebut, perlu diperhatikan diantaranya :
1. Jarak maksimal pembacaan sensor ultrasonik adalah antara range 0-30 cm.
2. Kalibrasi sensor ultrasonik harus akurat.
3. Pengambilan data sensor ultrasonik harus efektif dan efisien.
4. Pemakaian sabuk harus diluar sehingga tidak terhalang oleh pakaian.
Adapun kelebihan dan kekurangan dalam alat tersebut aalah:
1. Kelebihan : kelebihan dari alat tersebut adalah tunanetra bisa mendengarkan informasi melalui suara yang langsung dari Hp.
2. Kekurangan : kekurangan dari alat tersebut adalah baterai akan cepat habis apabila menyala terus menerus dan koneksi Bluetooth hanya dapat terkoneski dgn jarak 0-18 m,dijarak 19 m koneksi Bluetooth akan eror dan tidak dapat tersambung lagi.
3.4 Flow Chart Sistem
T
Y
Gambar 3.5 Flowchart Sistem
Dapat diketahui pada gambar diagram alir pengolahan data ultrasonik pada arduino uno. Pada jarak <30 cm, maka arduino mengirimkan sinyal ke smartphone android untuk mengeluarkan suara peringatan“awas”
mulai
Inisialisasi sensor ultrasonikk
baca data ultrasonikk
data ultrasonik
˂30 cm
kirim perintah ke smartphone
android
stop
3.5 Rangkaian Keseluruhan
Prinsip kerja rangkaian ini adalah dengan melakukan kalkulasi nilai masukan dari inputan berupa panajang gelombang dan perioda gelombang. Yang dimana kedua hal ini akan di hasilkan jarak tempuh lintasan gelombang yang dikonversi menjadi jarak sensor ke titik pantul. Sehingga dengan demikian akan diketahui jarak halangan di hadapan sensor. Kemudian hasilpembacaan akan dikirimkan melalui modul Bluetooth ke android.
Gambar 3.6 Rangkaian keseluruhan
BAB 4
PENGUJIAN ALAT DAN PROGRAM
4.1. Implementasi Sistem
Sistem ikat pinggang elektronik sebagai alat bantu tunanetra yang dibuat ini terdiri dari dua bagian utama, yaitu :
a. Ikat pinggang elektronik yang telah terintegrasi dengan mikrokontoller ArduinoUno dengan sensor ultrasonic dan modul bluetooh HC-05.
b. Smartphone Android nantinya yang akan menerima data dari sensor ultrasonik melalui bluetooth dan akan diolah menjadi suara. Dan juga Berperan dalam penginformasianlingkungan lokasi tunanetra berada.
Gambar 4.1 Hardware Kepala Ikat Pinggang Elektronik
Tiga unit sensor ultrasonik yang terhubung dengan mikrokontroler Arduino Uno berguna untuk mendeteksi halangan yang ada di depan tunanetra dan halangan dari sebelah kiri tunanetra dan halangan dari kanan tunanetra. Smartphone android berperan penting dalam penginformasian ke tunanetra dengan mengeluarkan suara.
Suara yang akan dikeluarkan yaitu peringatan terhadap halangan yang ada di depan,disebelah kiri dan disebelah kanan tunanetra. Selain itu android juga berfungsi sebagai media informasi untuk memberi petunjuk arah kemana tunanetra tersebut akan berjalan melalui suara yang dikeluarkan oleh smartphone tersebut.
4.2. Pengujian Sensor Ultrasonik HC-SR04
Dalam pengujian ini dilakukan pembacaan jarak oleh sensor ultrasonik yang dipasang pada ikat pinggang elektronik dengan membandingkan jarak sebenarnya yang diukur menggunakan penggaris atau mistar. Dari hasil pengujian dapat dianalisa perbedaan hasil pembacaan jarak dengan sensor ultrasonik dengan menggunakan mistar karena oleh adanya noise. Noise dapat berupa gangguan gelombang dari luar yang mempunyai interferensi gelombang dengan frekuensi yang sama, daya pantul objek dan lain-lain sehingga mempengaruhi selisih waktu pemancaran dan penerimaan pantulan gelombang. Langkah selanjutnya ialah dengan memasukkan program dibawah ini kemudian hasil output sensor ultrasonik akan di baca oleh mikrokontroller dan data dibaca melalui monitoring port pada laptop.
Berikut adalah program yang di upload pada mikrokontroller.
void setup () {
Serial.begin(9600);
}
void loop () {
int sensorValue = analogRead(A0);
Serial.println(sensorValue);
delay(1);
}
Gambar 4.2 Program sensor ultrasonik yang diberikan pada mikrokontroller
Pada layar akan tampil hasil pembacaan seperti berikut :
Gambar 4.3 Hasil Monitoring Sensor pada port COM 3
Apabila jarak berubah maka pembacaan sensor akan berubah pula. Kemudian data ini akan dicatat dan dibandingkan dengan data dari alat pembanding atau perhitungan secara matematis. Berikut data sensor dengan data perhitungan Jarak pada sensor.
NO
PEMBACAAN (CM) RALAT RALAT
SENSOR JARAK (%)
1 2 cm 2 cm 0 0
2 4 cm 4 cm 1 25
3 6 cm 6 cm 1 16,6
4 8 cm 8 cm 1 14,5
5 10 cm 10 cm 1 10
Tabel 4.1 Hasil Pembacaan Sensor
4.3 Pengujian dan Analisa Modul Bluetooth HC-05
Pengujian modul Bluetooth HC-05 dilakukan dengan menghubungkan smartphone android sebagai slaver. Pengujian ini menggukan software android Bluetooth Terminal yang berfungsi untuk menampilkan hasil pengolahan data yang dibaca sensor ultrasonik.Pengujian modul bluetooth HC 05 ini menjadikan jarak sebagai acuan pengujian. Dari hasil pengujian koneksi bluetooth dapat dianalisa pada jarak 19 meter bluetooth tidak terkoneksi dikarenakan bluetooth adalah media transmisi gelombang namun tidak mengedalikannya atau uniguided. Media transmisi unguided mempunyai beberapa faktor yang salah satunya jarak tempuh.Jadi pada jarak 19 meter merupakan batas jarak tempuh modul bluetooth HC-05.Berikut data pengujian modul bluetooth:
NO JARAK(M) STATUS
KONEKSI
STATUS SUARA
1 3 Terkoneksi Ada
2 6 Terkoneksi Ada
3 9 Terkoneksi Ada
4 12 Terkoneksi Tidak lancar
5 15 Terkoneksi Tidak lancar
6 19 Tidak
terkoneksi
Eror
Tabel 4.2 Pengujian modul bluetooth
4.4 Pengujian Mikrokontroller
Pengujian mikrokontroler dapat dilakukan dengan membuat rangkaian seperti gambar 4.1 lalu menghubungkan rangkaian ke komputer via USB dan memasukan program awal seperti berikut :
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
Gambar 4.4 Program Mikrokontroller
Gambar 4.5 Rangkaian pengujian Mikrokontroler ATMega 328P
Hasil yang di tampilkan pada pengujian rangkaian diatas Led akan menyala secara periodik setiap 1 detik.
4.5 Pengujian LCD
Pengujian LCD dilakukan dengan memasukkan program kedalam mikrokontroler sebagai berikut :
#include <LiquidCrystal.h>
const int rs = 12, en = 11, d4 = 5, d5 = 4, d6 = 3, d7 = 2;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
void setup() { lcd.begin(16, 2);
lcd.print("hello, world!");
}
void loop() { lcd.setCursor(0, 1);
lcd.print(millis() / 1000);
}
Gambar 4.6 Program LCD yang diberikan pada Mikrokontroller Hasil yang di tampilkan pada layar LCD adalah sebagai berikut :
Gambar 4.7 Hasil Pengujian LCD display 4.6 Pengujian Rangkaian Keseluruhan
Pengujian rangkaian keseleruhan dilakukan dengan memasukkan program kedalam mikrokontroler sebagai berikut.
#define trigPin l 13
#define echoPin l 12
#define trigPin2 l 11
#deffine echoPin2 l 10
#define trigPin3 l 9
#define echoPin3 8
#include <LiquidCrystal.h>
#define BT_SERIAL_RX 0
#define BT_SERIAL_TX 1
#include <SoftwareSerial.h>
SoftwareSerial
BluetoothSerial(BT_SERIAL_RX,BT_SERIAL_TX);
//initialize the library by associating any needed LCD interface pin
//with the arduino pin number it is connected to Const int rs = 7, en = 6, d4 =5, d5 = 4, d6 = 3, d7 = 2;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
Void setup() { Serial.begin (9600);
BluetoothSerial.begin(9600);
pinMode(trigPin1, OUTPUT);
pinMode(echoPin1, INPUT);
pinMode(trigPin2, OUTPUT);
pinMode(echoPin2, INPUT);
pinMode(trigPin3, OUTPUT);
pinMode(echoPin3, INPUT);
lcd.begin(16, 2);
//Print a message to the LCD.
lcd.print(“Pengukur Jarak”);
lcd.setCursor(0,1);
lcd.print(“benda”);
delay(2000);
lcd.clear();
}
Void loop() {
long duration1, distance1;
long duration2, distance2;
long duration3, distance3;
digitalWrite(trigPin1, LOW); // Added this line delayMicroseconds(2); // Added this line digitalWrite(trigPin1, HIGH);
delayMicroseconds(10); // Added this line digitalWrite(9trigPin1, LOW);
duration1 = pulseIn(echoPin1, HIGH);
distance1 = (duration1/2)/29.1;
digitalWrite(trigPin2,LOW); //Added this line delayMicroseconds(2);//Added this line digitalWrite(trigPin2,HIGH);
delayMicroseconds(10);//Added this line digitalWrite(trigPin2,LOW);
duration2 = pilseIn(echoPin2,HIGH);
distance2 = (duration2/2)/29.1;
digitalWrite(trigPin3,LOW);//Added this line delayMicroseconds(2);//Added this line digitalWrite(trigin3HIGH);
delayMicroseconds(10);//Added this line digitalWrite(trigPin3,LOW);
duration3 = pulseIn(echoPin3‟HIGH);
distance3 = (duration3/2)/29.1;
if (distance<30&&distance2<30&&distance3<30) {
Serial.println(“BERHENTI!!”);
lcd.clear();
lcd.setCursor(0,0);
lcd.print(“BERHENTI!!);
lcd.setCursor(0,1);
lcd.print(“BUNTU”);
}
if (distance<30&&distance2>30&&distance3>30) {
Serial.println(“DEPAN”);
lcd.clear();
lcd.setCursor(0,0);
lcd.print(“DEPAN”);
lcd.setCursor(0,1);
lcd.print(“BUNTU”);
}
if (distancel>30&&distance2<30&&distance3>30) {
Serial.println(“KIRI”);
lcd.clear();
lcd.setCursor(0,0);
lcd.print(“BERHENTI”);
lcd.setCursor(0,1);
lcd.print(“KIRI BUNTU”);
}
if (distance>30&&distance2>30&&distance3<30)
{
Serial.println(“KANAN”);
lcd.clear();
lcd.setCursor(0,0);
lcd.print(“BERHENTI”);
lcd.setCursor(0,1);
lcd.print(“KANAN BUNTU”);
}
if (distance<30&&distance2<30&&distance3>30) {
Serial.println(“BELOK KANAN”);
lcd.clear();
lcd.setCursor(0,0);
lcd.print(“STOP”);
lcd.setCursor(0,1);
lcd.print(“BELOK KANAN”);
}
if (distance<30&&distance2>30&&distance3<30) {
Serial.println(“BELOK KIRI”);
lcd.clear();
lcd.setCursor(0,0);
lcd.print(“STOP”);
lcd.setCursor(0,1);
lcd.print(“BELOK KIRI”);
}
if (distance>30&&distance2<30&&distance3<30) {
Serial.println(“AMAN”);
lcd.clear();
lcd.setCursor(0,0);
lcd.print(“AMAN”);
lcd.setCursor(0,1);
lcd.print(“JALAN TERUS”);
}
delay(1000);
}
Gambar 4.8 Program rangkaian keseluruhan
Setelah alat dikalibrasi dan dilakukan pengujian ulang maka didapat hasil pengujian sebagai berikut :
NO
PEMBACAAN Status
Suara SENSOR
Tampilan
1 2 LCD
3
1 Terhalang Bebas Bebas DEPAN ada
2 Bebas Terhalang Bebas KANAN ada
3 Bebas Bebas Terhalang KIRI ada
4 Terhalang Terhalang Terhalang STOP ada
5 Bebas Bebas Bebas AMAN ada
Tabel 4.3 Hasil Pengujian Seluruh rangkaian
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari perancangan dan pengujian alat dapat disimpulkan hal hal sebagai berikut :
1. Sensor ultrasonik berfungsi dengan baik dalam membaca kecepatan putaran roda.
2. Sensor ultrasonic mampu membaca kecepatan dengan error maksimum 10%.
3. Koneksi bluetooth menggunakan modul bluetooth HC-05 mempunyai jarak maksimal koneksi 18 meter dan tidak mempunyai delay pengiriman data atau realtime.
4. Harga perancangan alat relatif lebih murah dibanding dengan operasi mata yang tidak ada jaminan berhasil.
5.2 Saran
Untuk Pengembangan selanjutnya perlu diperhatikan hal – hal sebagai berikut :
1. Sebaiknya dalam kalibrasi dapat dilakukan dengan alat pembanding yang lebih akurat sehingga hasil sensor dapat dikatakan atau di jamin pembacaan data sebenarnya.
2. Pada sistem ikat pingggang elektronik menggunakan baterai yang efisien dalam segi ukuran dan daya seperti baterai kotak.
3. Sebaiknya ikat pinggang menggunakan model yang simpel dan efesien
DAFTAR PUSTAKA
Atmel.ATmega328/P.microchip,November 2016 [online].Tersedia:
http://w.microchip.com/downloads/en/DeviceDoc/Atmel-42735-8-bit-AVR- Microcontroller-ATmega328-328P_Summary.pdf w1
Budiharto,Widodo.2005.Panduan Lengkap Belajar Mikrokontroler, Perancangan Sistem dan Aplikasi Mikrokontroler.Jakarta: PT Elex Media Komputindo.
Digi-ware. 2009. PING)))™ Ultrasonic Range Finder. Surabaya.
http://digi-ware.com
Nurcahyo,Sidik. 2012. Aplikasi dan teknik pemrograman mikrokontrolerAVR Atmel.
Yogyakarta:Andi.
Priyambodo,Adityo.2010.Uji Coba Menggunakan bluetooth.Jakarta:UI.
Sumardi.2013.MIKROKONTROLER belajar AVR mulai dari nol.Edisi pertama Yogyakarta: Graha Ilmu..
Suprianto, Dodit. 2012. Pemrograman Aplikasi Android.Jakarta:Mediakom.
Suyadhi, Taufik Dwi Septian.2010.Buku Pintar Robotika, Bagaimana merancang dan membuat robot sendiri.Yogyakarta: Andi.
www.mcuoneclipse.com. 2013. Using thehc06 bluetooth module.
http://mcuoneclipse.com/2013/06/19/using-the-hc-06-bluetooth-module/.