Supian SUDRADJAT
Referenţi ştiinţifici: Prof. univ. dr. Vasile PREDA Prof. univ. dr. Ion V DUVA
@ editura
universit
ţ
ii din bucure
ş
ti
Ş
os. Panduri, 90-92, Bucure
ş
ti-050663;Telefon/Fax: 410.23.84
E-mail:[email protected]
Internet:www.editura.unibuc.ro
Descrierea CIP a Bibliotecii Na
ţ
ionae a Romaniei
SUDRADJAT, SUPIAN
Mathematical programming models for portfolio selection /
Supian Sudradjat – Bucure
ş
ti: Editura Universitt
ţ
ii din
Bucure
ş
ti, 2007
ISBN 978-973-737-351-9
This work would not have been possible without the advice and help of
many people. Foremost, I wish to express my deep gratitude to:
-
Professor Vasile PREDA,
-
Prof. univ. dr. Ion V DUVA
I would also like to thank all the people who helped me during the course
of my studies. Above all,
- Rector of Bucharest University Romania,
- Rector of Padjadjaran University Bandung Indonesia,
- H.E. Nuni Turnijati Djoko,(the Ambasador of the Republic of
Indonesia in Bucharest Romania),
To:
- my dear parents,
Halimah and the late Ojon SUPIAN
- my wife Deti SUDIARTI, and
- my childrens
P
reface
Gratitude to the Almighty, the only God, for completeness of this book
entitled “
Mathematical Programming Models For Portfolio Selection” so it can be publish as planed.The subject of this book is in close connection to some mathematical techniques
applications in financial modeling. More specifically, multicriteria portfolio optimization
started with the Markowitz mean-variance model. Basically, Harry Markowitz introduced the
theory of modern portfolios, which originates in a quadratic programming problem applied
for evaluating a portfolio of assets. The resulting model, namely the mean-variance model, is
one of the most used quadratic programming models. Then, Markowitz’s model was
extended in various directions. Recently, some authors implemented dynamic investments
models in order to study long-term effect and improve the performance.
Constructing a dynamic financial model consists of three basic components: 1) a
stochastic differential system of equations for describing the model’s relevant random
quantities development (alternative scenarios are therefore generated); 2) a decision simulator
for finding investor position at each moment and 3) a dynamic optimization model.
In the classical approach of portfolios selection, expected utility theory is applied
based on a set of axioms related to investor’s behavior and on order relation between
deterministic and random events from the set of possible choices. The specific characteristics
of axioms characterizing the utility function take into account the assumption that a
probability measure could be defined on random results. If, in addition, one assumes that the
origins of these random results are not very well known, then the probability theory proves
itself inadequate due to the lack of experimental information. In these situations, the decision
problem could be addressed on uncertainty basis, using different mathematical instruments.
Furthermore, the preferences function describing investor’s utility could be modified with
The portfolio selection problem on uncertainty assumption could be transformed into
a decision problem in fuzzy environment. Fuzzy theory was intensively used from 1960 for
solving many problems, including financial risk management problems. The concept of fuzzy
random variable is a proper extension of classical random variable. Using fuzzy approach, the
experts’ knowledge and subjective opinions of investors could be easier fit in a portfolio
selection model.
The main goal of this book is to examine the methods for solving statistical problems
involving fuzzy element in the random experiment and it aims to be a starting point in
constructing a portfolio selection model of Markowitz type. There are presented models
which involve stochastic dominance constraints on the returns of portfolios and necessary
conditions for possible constraints programming, which are solved by transforming them into
multi-objective linear programming problems.
In the first chapter there is underlined the importance of the topic proposed in this
book, and then, some important results from the literature are presented. Also, in this chapter
are slightly detailed the other chapters of the book, and some results are highlighted.
In the second chapter, “Some classes of stochastic problems”, the relationships
between efficiency sets for some multi-objective determinist programming problems are
presented. These results will be used later in analyzing the concept of efficient solution for a
multi-objective stochastic programming problem. We have to note here the results obtained
in Sections 2.4, 2.6. and 2.7, which extend the results of Cabalero, Cerda, Munoz, Rez,
Stancu-Minasian and White.
In third chapter, “Portofolio optimization with stochastic dominance constraints, it is
considered the construction of a portfolio with finite assets whose returns are described by a
discrete distribution. A portfolio optimization model with stochastic dominance constraints
on the returns is presented. Optimality and duality of these models are studied and, also,
equivalent optimization models are constructed using utility functions.
In forth chapter, “The dominance-constrained portfolio”. We remark the results from
Sections 4.3, 4.4 and 3.6, extending the results of Dentcheva, Ruszczynski, Rothschild,
In fifth chapter, “Portfolio optimization using fuzzy decision”. In this chapter we
introduce with fuzzy linear programming models and interactive fuzzy linear programming.
Also represents a generalization of Chapter 4. Here optimization problems with stochastic
dominance constraints, using fuzzy decisions. The fuzzy linear programming problems and
fuzzy multi-objective programming problems are thoroughly treated. We remark again the
important results of Sections 5.4, 5.5, 5.6, 5.7 and 5.8. and the extensions of some results
belonging to Markowitz, Klirr, Zuan, Gasimov, Lai and Hwang, and in Section 5.9, we
studied about multiobjective fractional programming problem under fuzziness.
In sixth chapter, “A possibilistic aprroach for portfolio selection problem“ there is
considered a programming problem with possible constraints, which will be solved by
transforming it into a multi-objective programming problem. The results from Sections 6.22,
6.3.3, 6.4 and 6.5, extend some results given by Chen, Inuiguchi, Ramik, Majlender, Yhou
and Li.
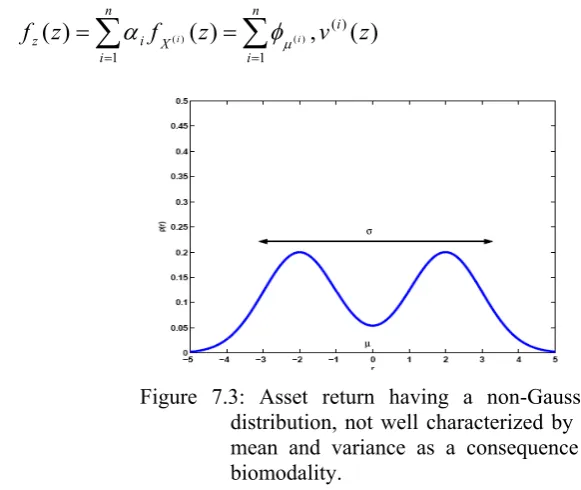
In seventh chapter, “Atzbergerţ’s extension of Markowitz portfolio selection”, represent one basic manner by which Markowitz’s theory for portfolio selection can be
extended to account for non-gaussian distributed returns. We then discuss how a model
incorporating information about the performance of the assets in different market regimes
over the holding period can be developed.
Most of the original results presented in this book were presented in very important
conferences and workshops. Also, we have to note the large list of references considered
elaborating this book.
I wish to acknowledge the teachers, colleagues, and reviewers who contributed to
earlier editions of this book and further to extend my appreciation for the guidance and
suggestions donated during its revision.
Gratitude is particularly due to Prof. DR. Vasile PREDA, Prof. DR. Ion V DUVA,
Acad. Marius IOSIFESCU, Dr. Ion M. STANCU-MINASIAN, DR. Miruna BELDIMAN,
DR. Roxana CIUMARA. I would also like to thank all the people who helped me. Above
Indonesia, H.E. Nuni Turnijati Djoko (Ambasador of the Republic of Indonesia in Bucharest
Romania), Islah Abdullah, Purno Wirawan, Sam E. Marentek, Hary Irawan, Pratiwi
Amperawati, Dedin M. Nurdin.
C
ONTENTS
Preface
Chapter 1 Introduction …………..……….. ……….... 1
Chapter 2 Some classes of stochastic problems ………... 7
2.1 Introduction ……… 7
2.2 Efficient solution concepts ……… 10
2.3 Relations between the efficient sets of several deterministic multiobjective programming problems ………... 13
2.4 Some relations between expected-value efficient solution, minimum-variance efficient solutions and expected-value standar-deviation efficient solutions ………... 19
2.5 Multicriteria problems ………. 20
2.6 Relations between classes of solutions for (P1), (P2) and (P3)….. 21
2.7 White’s approach multiobjective weighting factors auxiliary optimization problem for (P1), (P2) and (P3) ……….. 27
2.7.1 Introduction ………. 28
2.7.2 Transformations and auxiliary optimization problem associated to (P1), (P2) and (P3) ……….. 29
2.7.3 Non-convex auxiliary optimization problem 32 Chapter 3 Stochastic dominance …..………….……….. 40
3.1 Introduction ……… 40
3.2 Stochastic dominance ………. 42
3.4 Consistency with stochastic dominance ………. 45
Chapter 4 The dominance-constrained portfolio problem ………... 52
4.1 Introducere ……….. 52
4.2 Dominance-constrained . …….……… 53
4.3 Optimality and duality ……… 56
4.5 Spliting ….……….. 60
4.6 Decomposition …….………. 64
Chapter 5 A fuzzy approach to portfolio optimization ………. 68
5.1 Introduction ……….. 68
5.2 Fuzzy linear programming models ..………... 69
5.3 Interactive fuzzy programming ……….. 76
5.3.1 Interactive fuzzy linear programming algorithm ……… 78
5.4 Portfolio problem .………. 80
5.5 Case of fuzzy technological coefficient and fuzzy right-hand side numbers ……… 83
5.5.1 Case of fuzzy technological coefficients ……… 83
5.5.2 Portfolio problems with fuzzy technological coefficients and fuzzy right-hand-side numbers ………. 88
5.6 The modified subgradient method ……….. 93
5.7 Defuzzification and solution of defuzzificated problem ………. 96
5.7.1 A modified subgradient method to fuzzy linear programming ……… 96
5.7.2 Fuzzy decisive set method ..………... 98
5.8 Portfolio problem with fuzzy multiple objective ……….. 110
5.9.1 Problem formulation and the solution concept ………… 116
5.9.2 Solution algorithm ……….. 122
5.9.3 Basic stability nations for problem (FMOFP) ………. 125
5.9.4 Utilization of Kuhn-Tucker conditions corresponding to problem ………..………... 125
(
P
λ)
Chapter 6 A possibilistic approach for a portfolio selection problems .. 1286.1 Introduction ……….. 128
6.2 Mean VaR portfolio selection multiobjective model with transaction costs ..………. 129
6.2.1 Case of downside-risk ..……….. 129
6.2.2 Case of proportional transaction costs model ………... 131
6.3 A possibilistic mean Var portfolio selection model …………... 131
6.3.1 Possibilistic theory. Some preliminaries ………. 132
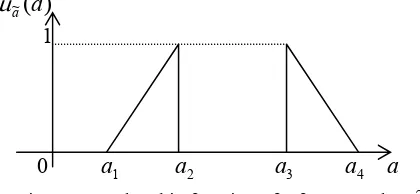
6.3.2 Triangular and trapezoidal fuzzy numbers …………... 133
6.3.3 Construction of efficient portfolios .……….. 135
6.4 A weighted possibilistic mean value approach ……….. 138
6.5 A weighted possibilistic mean variance and covariance of fuzzy numbers ………... 142
Chapter 7 An extention of Markowitz portfolio selection ……….. 146
7.1 Introduction ……….. 146
7.2 Gaussian mixture distribution ……… 148
7.3 An extention of the Markowitz portfolio theory ……….. 151
7.4 Portfolio selection problem (GM-PoS) ………... 152
Bibliography
….……….……… 154
Acronyms & Abbreviations
………
174
Index
………..
175
C
HAPTER 1
INTRODUCTION
The problem of optimizing a portfolio of finitely many assets is a classical problem in
theoretical and computational finance. Since the seminal work of Markowitz [112] it is
generally agreed that portfolio performance should be measured in two distinct
dimensions: the mean describing the expected return, and the risk which measures the
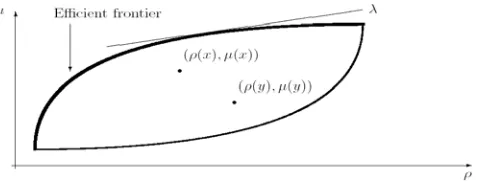
uncertainty of the return. In the mean–risk approach, we select from the universe of all
possible portfolios those that are efficient: for a given value of the mean they minimize
the risk or, equivalently, for a given value of risk they maximize the mean. This
approach allows one to formulate the problem as a parametric optimization problem, and
it facilitates the trade-off analysis between mean and risk.
In the classical approach to portfolio selection, one often applies the theory of
expected utility that is derived from a set of axioms concerning investor behaviour as
regards the ordering relationship for deterministic and random events in the choice set.
The specific nature of the axioms that characterize the utility function is based on the
assumption that a probability measure can be defined on the random outcomes.
However, if we assume that the origins of these random events are not well known, then
the theory of probability proves inadequate because of a lack of experimental
information. In such instances, one has to approach the decision theory problem under
uncertainty using different mathematical tools. Further, the preference function that
describes the utility of the investor may itself be changing with the degree of uncertainty.
Moreover, one could postulate that the investor has multiple preference functions each of
which corresponds to a particular view on various factors that influence the future state
of the economy and the confidence with which it is held. Under these conditions, the
existing literature in the field of economic theory does not provide the investor with
sufficient tools to address the portfolio selection problem. The discussion above
highlighted potential difficulties one would encounter when addressing the portfolio
would be confronted with multiple utility functions. Each one of these utility functions
may be attributed to a particular market view being held and can be broadly described as
capturing the investor’s level of satisfaction if it turns out to be true. For instance, a fund
manager structuring a fixed-income portfolio may have only vague views regarding
future interest rate scenarios and these can broadly be described as being “bullish”,
“bearish” or “neutral”. Such views may arise out of the subjective and/or intuitive
opinion of the decision-maker on the basis of information available at the given point in
time. Under these circumstances, one might try to characterize the range of acceptable
solutions to the portfolio selection problem as a fuzzy set (see Bellman and Zadeh [9]).
In simple terms, a fuzzy set is a class of objects in which there is no clear distinction
between those objects that belong to the class and those that do not. Further, associated
with each object is a membership function that defines the degree of membership of the
object in the set. In this respect, fuzzy set theory provides a framework to deal with
problems in which the source of imprecision is the absence of sharply defined criteria of
class membership rather than the presence of random variables. This provides the point
of departure from probability theory, where the uncertainty arises from the random
nature of the environment rather than from any vagueness of human reasoning. In the
context of choosing optimal portfolios that target returns above the risk-free rate for
certain market scenarios while at the same time guaranteeing a minimum rate of return,
fuzzy decision theory provides an excellent framework for analysis. This is because the
nature of the problem requires one to examine various market scenarios, and each such
scenario will in turn give rise to an objective function. In the face of uncertainty, one will
not be able to assign a numerical value to the probability of these scenarios occurring.
Under this constraint, it is not clear how a suitable weighting vector can be determined to
solve the multi-objective optimization problem. One way to overcome this difficulty is to
use the membership function that arises in fuzzy decision theory to serve as a suitable
preference function for finding an ordering relation for the uncertain events. In fact, one
can describe the membership function as the fuzzy utility of the investor, which
describes the behaviour of indifference, preference or aversion towards uncertainty,
Mathieu-Nicot [115]. The advantage of using the membership function is that it does not
rely necessarily on the existence of a probability measure but rather on the existence of
The above arguments show how the portfolio selection problem under uncertainty can be
transformed into a problem of decision-making in a fuzzy environment Bellman and
Zadeh [9]. To do this, one has to model the aspirations of the investor on the basis of the
strength of the views held on various market scenarios through suitable membership
functions of a fuzzy set. For instance, a fund manager structuring a fixed-income
portfolio may have aspiration levels as to what the portfolio’s acceptable excess return
over the risk-free rate should be for those scenarios he/she considers more likely. The
concepts of fuzzy sets, fuzzy goals and fuzzy decision will be introduced and a fuzzy
multi-criteria optimization problem will be formulated.
As stated by Markowitz in [112,114), “The expected utility maxim appears reasonable
offhand. But so did the expected return maxim. Perhaps there is some equally strong
reason for decisively rejecting the expected utility maxim as well”.
The classical Markowitz model is
[ ]
( ) )(x =Var R x
ρ
,where
ρ
(
x
)
is the variance of the return, andR
(
x
)
is total return. The mean–risk portfolio optimization problem is formulated as follows:[
(
)
(
)
]
max
x
x
x∈X
μ
−
λρ
.where R and X are defined in section 3.3.
Here,
λ
is a nonnegative parameter representing our desirable exchange rate of meanfor risk. If
λ
=0, the risk has no value and the problem reduces to the problem of maximizing the mean. Ifλ
>0 we look for a compromise between the mean and the risk. The general question of constructing mean–risk models which are in harmony withthe stochastic dominance relations has been the subject of the analysis of the recent
papers Dentcheva and Ruszcynski [41,42], Rothschild and Stiglitz [155], Ogryczak and
Ruszczynski [127, 128].
Portfolio selection is generally based on a trade-off between expected return and risk,
and requires a choice for the risk measure to be implemented. Usually, the risk is
evaluated by the conditional second-order moment, i.e., conditional variance or
volatility. This leads to the determination of the mean-variance efficient portfolio
(probability of failure), initially proposed by Roy [149] and then implemented by Levy
and Sarnat [100]. The efficient portfolio is one for which there does not exist another
portfolio that has higher mean and no higher variance, and/or has less variance and no
less mean at the terminal time T . In other words, an efficient portfolio is one that is Pareto optimal.
Notwithstanding its popularity, mean variance approach has also been subject to a lot of
criticism. Alternative approaches attempt to conform the fundamental assumptions to
reality by dismissing the normality hypothesis in order to account for the fat-tailedness
and the asymmetry of the asset returns. Consequently, other measures of risk, such as
Value at Risk (VaR), expected shortfall, mean absolute deviation, semi-variance and so on are used.
Another theoretical approach to the portfolio selection problem
- Stochastic dominance (Mosler and Scarsini, [121]), the concept of stochastic dominance
is related to models of risk-averse preferences Fishburn [52]. It originated from the
theory of majorization Hardly, Littlewood and Poya [70] for the discrete case, was later
extended to general distributions Quirk and Saposnik[146]; Hadar and Russel [66];
Hanoch and Levy [68]; Rothschild and Stielits [155], and is now widely used in
economics and finance (Levy [99]).
- The usual (first order) definition of stochastic dominance gives a partial order in the
space of real random variables. More important from the portfolio point of view is the
notion of second-order dominance, which is also defined as a partial order. It is
equivalent to this statement: a random variable R dominates the random variable Y if
)]
(
[
)]
(
[
u
R
E
u
Y
E
≥
for all non-decreasing concave functions u(·) for which theseexpected values are finite. Thus, no risk-averse decision maker will prefer a portfolio
with return Y over a portfolio with return R.
- The stochastic optimization model with stochastic dominance constraints Dentcheva and
Ruszcynsk [42, 44], can be used for risk-averse portfolio optimization. We add to the
portfolio problem the condition that the portfolio return stochastically dominates a
reference return, for example, the return of an index. We identify concave
expected return modified by these utility functions, guarantees that the optimal portfolio
return will dominate the given reference return.
- Fuzzy set theory, since 1960s, has been widely used to solve many problems including
financial risk management. The concept of a fuzzy random variable is a reasonable
extension of the concept of a usual random variable in the many practical applications of
random experiments, where the implicit assumption of data precision seems to be an
inappropriate simplification rather than an adequate modeling of the real physical
conditions. By using fuzzy approaches, the experts’ knowledge and the investors’
subjective opinions can be better integrated into a portfolio selection model. Bellman and
Zadeh [9] proposed the fuzzy decision theory. Ramaswamy [14] presented a bond
portfolio selection model based on the fuzzy decision theory, Sudradjat and Preda [188]
presented on portfolio optimization using fuzzy decisions. The notion of a fuzzy random
variable (see for example, Kwakernaak [91], Puri and Ralescu [145], Kruse and Meyer
[89] provides a valuable model that is manageable in a probabilistic framework. Also,
the concept of fuzzy information presented by Zadeh [216] can formalize either the
experimental data or the events involving fuzziness. The concept of a fuzzy random
variable Puri and Ralescu [145] was defined as a tool for establishing relationships
between the outcomes of a random experiment and inexact data, Ostermark [128]
proposed a dynamic portfolio management model. Watada [201] presented another type
of portfolio selection model based on the fuzzy decision principle. The model is directly
related to the mean-variance model, where the goal rate for an expected return and the
corresponding risk described by logistic membership functions.
- In standard portfolio models uncertainty is equated with randomness, which actually
combines both objectively observable and testable random events with subjective
judgments of the decision maker into probability assessments. A purist on theory
would accept the use of probability theory to deal with observable random events, but
would frown upon the transformation of subjective judgments to probabilities. Tanaka
et al [194] give a special formulation of fuzzy decision problems by the probability
events. Carlsson et al [26] studied the portfolio selection model in which the rate of
return of security follows the possibility distribution. Sudradjat, Popescu and Ghica
[187] studied on possibilistic approach a portfolio selection problem. Applying
be easily introduced to the estimation of the return rates and (2) the reduced problem is
more tractable than that of the stochastic programming approach. Korner [86] pointed
out that the variability is given by two kinds of uncertainties: randomness (stochastic
variability) and imprecision (vagueness). Randomness models the stochastic variability
of all possible outcomes of an experiment. Fuzziness describes the vagueness of the
given or realized outcome. Kwakernaak [91] presented another explanation for the
difference between randomness and fuzziness. He pointed out that when we consider
an opinion poll in which a number of people are questioned, randomness occurs
because it is not known which response may be expected from any given individual.
Once the response is available, there still is uncertainty about the precise meaning of
the response.
The aim of this book is to examine methods for handling statistical problems
involving fuzziness in the elements of the random experiment, and serves as a point from
which to derive the Markowitz portfolio model in the presence of efficient solution
concepts for a stochastic multi-objective programming, develop portfolio optimization
model involving stochastic dominance constraints on the portfolio return and necessary
and sufficient conditions of optimality and duality, we develop portfolio optimization
using fuzzy decisions in concentrate on fuzzy linear programming, and finally we
consider a mathematical programming model with possibilistic constraint and we it solve
C
HAPTER 2
SOME CLASES OF STOCHASTIC PROBLEMS
2.1 Introduction
Stochastic programming deals with a class of optimization models and algorithms in
which some of the data may be subject to significant uncertainty. Such models are
appropriate when data evolve over time and decisions need to be made prior to observing
the entire data stream. For instance, investment decisions in portfolio planning problems
must be implemented before stock performance can be observed. Similarly, utilities must
plan power generation before the demand for electricity is realized. Such inherent
uncertainty is amplified by technological innovation and market forces. As an example,
consider the electric power industry. Deregulation of the electric power market, and the
possibility of personal electricity generators (e.g. gas turbines) are some of the causes of
uncertainty in the industry. Under these circumstances it pays to develop models in
which plans are evaluated against a variety of future scenarios that represent alternative
outcomes of data. Such models yield plans that are better able to hedge against losses
and catastrophic failures. Because of these properties, stochastic programming models
have been developed for a variety of applications, including electric power generation
(Murphy [124]), financial planning (Carino et al [23]), telecommunications network
planning (Sen et al [170]), and supply chain management (Fisher et al [51]), to mention a
few.
The widespread applicability of stochastic programming models has attracted
considerable attention from the OR/MS community, resulting in several recent books
(Kall and Wallace [77], Birge and Louveaux [16], Prekopa [138, 139]) and survey
articles (Birge [15], Sen and Higle [169]). Nevertheless, stochastic programming models
remain one of the more challenging optimization problems.
While stochastic programming grew out of the need to incorporate uncertainty in linear
and other optimization models (Dantzig [39], Beale [8], Charnes and Cooper [30]), it has
instance, decision analysis, dynamic programming and stochastic control, all address
similar problems, and each is effective in certain domains. Decision analysis is usually
restricted to problems in which discrete choices are evaluated in view of sequential
observations of discrete random variables. One of the main strengths of the decision
analytic approach is that it allows the decision maker to use very general preference
functions in comparing alternative courses of action. Thus, both single and
multi-objectives are incorporated in the decision analytic framework. Unfortunately, the need
to enumerate all choices (decisions) as well as outcomes (of random variables) limits this
approach to decision making problems in which only a few strategic alternatives are
considered.
These limitations are similar to methods based on dynamic programming, which also
require finite action (decision) and state spaces. Under Markovian assumptions the
dynamic programming approach can also be used to devise optimal (stationary) policies
for infinite horizon problems of stochastic control (see also Neuro-Dynamic
Programming by Bertsekas and Tsitsiklis [13]). However, DP-based control remains wedded to Markovian Decision Problems, whereas path dependence is significant in a
variety of emerging applications. Stochastic programming provides a general framework
to model path dependence of the stochastic process within an optimization model.
Furthermore, it permits uncountably many states and actions, together with constraints,
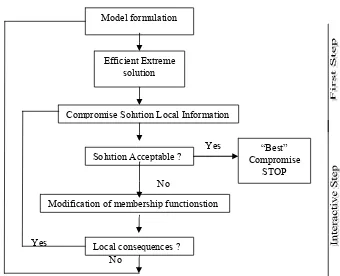
time-lags etc. One of the important distinctions that should be highlighted is that unlike
dynamic programming, stochastic programming separates the model formulation activity
from the solution algorithm. One advantage of this separation is that it is not necessary
for stochastic programming models to all the same mathematical assumptions. This leads
to a rich class of models for which a variety of algorithms can be developed. On the
downside of the ledger, stochastic programming formulations can lead to very large scale
problems, and methods based on approximation and decomposition become paramount.
A whole series of production processes, economic system of different types, and
technical objective is described by mathematical models which are multi-criteria
optimization problems (Steuer [177], Chankong and Haimes [29] and Stancu-Minasian
account simultaneously the influence of a number of contradictory external factors on
the system.
The most intensive development of the theory and the methods of detailed bibliographic
description of which is given in Zeleny [217] and Urli and Nadeau [196], are linear and
non linear multi-criteria optimization problems. Some classifications of the methods of
this type, oriented to the specific user, and multi-criteria optimization problems with
contradictory constraints were explored in are given (Salukavadze and Topchishvili
[166]). Very interesting results generalized into the general domination cone for different
classes of solutions of multi-criteria problem are given (Salukavadze and Topchishvili
[166]).
Now, one of the widely developing fields in multi-criteria optimization is its qualitative
theory; the most important results are given (Salukavadze and Topchishvili [166]).
Well-known algorithms can be modified and new theoritical results.
The objective of this chapter is to examine some properties of different classes of
multi-criteria optimization problem solutions.
Most real-life engineering optimization problems require simultaneous optimization of
more than one objective function. In these cases, it is unlikely that the same values of
design variables will results in the best optimal values for all the objectives. Hence, some
trade-off between the objectives is needed to ensure a satisfactory design.
As the system efficiency indices can be different (and mutually contradictory), it is
reasonable to use the multi-objective approach to optimize the overall efficiency. This
can be done mathematically correctly only when some optimality principle is used. We
use Pareto optimality principle, the essence of which is following. The multi-objective
optimization problem solution is considered to be Pareto-optimal if there are no other
solutions that are better in satisfying all of the objectives simultaneously. That is, there
can be other solutions that are better in satisfying one or several objectives, but they
2.2
Efficient solution concepts
Consider a model in which the design/decision associated with a system is specified via
vector x. Under uncertainty, the system operates in an environment in which there are uncontrollable parameters which are modeled using random variables. Consequently, the
performance of such a system can also be viewed as a random variable. Accordingly,
stochastic programming models provide a framework in which designs (x) can be chosen to optimize some measure of the performance (random variable). It is therefore natural to
consider measures such as the worst case performance, expectation and other moments
of performance, or even the probability of attaining a predetermined performance goal.
Let us consider the stochastic multi-objective programming problem Caballero, et al [21]
(
(
,
~
),...,
(
,
~
)
)
min
z
1x
c
z
qx
c
D
x∈ , (2.1)
where the following notations and assumptions
• there is a compact set D⊆Rn of feasible actions;
• n
x
∈
R
is thevector of decision variables of the problem and c~ is a random vector whose components are random continous variables, defined on the setn
R
E
∈
. We assume given the familyF
of events (that is, subset ofE
) and thedistribution of probability P defined on
F
so that, for any subset ofE
,A
⊂
E
,F
∈
A
, the probability P(A) is known. Also, we assume that the distribution of probability P is independent of the decision variablesx
1,...,
x
n;• there are q objective functions
{
f
k(
⋅
)}
withf
k(
x
)
∈
R
+ for all x∈D andc
~is a random vector whose components are random continuous variable;
• it is required to find members of the efficient (vector minimal) set E of D with respect to the order relation
≤
onR
q, where, by definition,)}
(
)
(
)
(
)
(
,
:
{
x
D
y
D
f
y
f
x
f
y
f
x
E
=
∈
∈
≤
→
=
(2.2)Let
z
k(
x
)
is the expected value of the kth objective function, and letσ
k(
x
)
be its standard deviation,k
∈
{
1
,...,
q
}
. Let us assume that, for everyk
∈
{
1
,...,
q
}
and forrelations between expected value standard deviation efficient solution and efficient
solutions.
Next the following definitions by Caballero, et al [21],
Definition 2.1 [21] Expected-Value Efficient Solution. The point x∈D is an expected-value efficient solution of the stochastic multi-objective problem if it is Pareto efficient to the following problem :
(
(
),...,
(
)
)
min
:
)
(
PE
z
1x
z
qx
D
x∈ .
Let EPE be the set of expected-value efficient solution of the stochastic multi-objective problem.
Definition 2.2 [21] Minimum-Variance Efficient Solution. The point x∈D is a minimum-variance efficient solution for the stochastic multi-objective problem if it is a Pareto efficient solution for the problem :
(
( ),..., ( ))
min: )
(P 2 12 x q2 x
D
x
σ
σ
σ
∈ .Let σ2
P
E
be the set of efficient solutions of the problem(
P
σ
2)
.Definition 2.3 [21] Expected-Value Standard-Deviation Efficient Solution orE
σ
Efficient Solution. The point x∈Dis an expected-value standard-deviation efficient solution for the stochastic multi-objective programming problem if it is a Pareto efficient solution to the problem
(
(
),...,
(
),
(
),...,
(
)
)
min
:
)
(
PE
z
1x
z
qx
1x
qx
D
x
σ
σ
σ
∈ .Let
E
PEσ be the set of expected-value standard-deviation efficient solutions of the stochastic multi-objective programming problem (2.1).Now, we give the concepts of efficiency for two criteria of maximum probability. As we
will see next, in order to define these two concepts, the minimum-risk criterion (concept
of minimum-risk efficiency) and Kataoka criterion (efficiency in probability) are applied
respectively to each stochastic objective.
(
(
~
(
,
~
)
,...,
(
~
(
,
~
)
)
)
max
:
))
(
(
1 1 q qD
x
P
z
x
c
u
P
z
x
c
u
u
PRM
≤
≤
∈ ,
Let
E
PRM(u) be the set of efficient solution for the problem (PMR(u)).Definition 2.5 [21] Efficient Solution with Probabilities
β
1,...,
β
q orβ
-EfficientSolution. The point x∈D is an efficient solution with probabilities
β
1,...,
β
q if there existu
∈
R
q such that(
x
t,
u
t)
t is a Pareto efficient solution to problem:))
(
(
PP
β
(
)
D
x
q
k
u
c
x
z
P
u
u
k k k
q u
x
∈
=
≥
≤
}
,
1
,
,
)
~
,
(
~
{
,...,
min
1,
β
Let
E
PP(β)⊂
R
n be the set of efficient solutions with probabilitiesβ
1,...,
β
qfor the stochastic multi-objective programming problem (2.1).It may be noted that these definitions of efficient solution are obtained by applying the
same transformation criterion to each one of the objectives separately (expected value,
minimum variance, etc.), and by building after word the resulting deterministic
multiobjective problem. In this sense, it is necessary to the following results.
Remark 2.1 The concepts of expected value, minimum variance, etc., weak and properly efficient solution can be defined in a natural way.
Remark 2.2The concepts of minimum-risk efficiency and
β
-efficiency require setting a priori a vector of aspiration levels u or a probability vectorβ
. This implies that, in both cases, the efficient set obtained depends on the predetermined vectors in such a way that, in general, different level and proba bility vector give rise to different efficient sets,). ( )
(
), ( )
(
' '
' '
β
β
β
β
PP PPPRM PRM
E E
u E u E u
u
≠ ⇒
≠
≠ ⇒
≠
strictly increasing, the set of efficient solutions does not vary in problem if we substitute standard deviation for variance, White [209].
Remark 2.46 The efficiency in probability criterion is a generalization of the one presented by Goicoechea, Hansen, and Duckstein [63], who define the same concept taking the same probability
β
for all the stochastic objectives and with the probabilistic equality constraints taking the formβ
=
≤
}
)
~
,
(
~
{
z
kx
c
u
kP
.This notion was introduced by Stancu-Minasian [179], considering the Kataoka problem
in the case of multiple criteria.
2.3
Relations between the efficient sets of several of deterministic
multiobjective programming problems
We present some relations between the efficient sets of several problems of deterministic
multi-objective programming problems. These results will be used later for analysis of
concepts of efficient solutions for multi-objective stochastic problems.
Considered
f
andg
be vectorial functions defined on the same setH
⊂
R
n with nH
f
:
⊂
R
→
R
q andg
:
H
⊂
R
n→
R
q and letα
,
γ
be nonnull vectors with q real components, that is,α
,
γ
∈
R
q andα
,
γ
≠
0
. Let us consider the following multiobjective problems:(PD1)
min
(
f
1(
x
),...,
f
q(
x
),
1(
g
1(
x
)),...,
q(
g
q(
x
))
)
Dx∈
γ
γ
(2.3)(PD2)
min
(
f
1(
x
),...,
f
q(
x
)
)
Dx∈ (2.4)
(PD3) min
(
1(g12(x)),..., q(gq2(x))))
Dx∈
γ
γ
(2.5)with,
γ
∈
R
q,γ
≠
0
. LetE
1,
E
2,
E
3 be the sets of weakly efficient, efficient, andTheorem 2.1 We assume that
g
>
0
for every x∈D,. Then:i1
E
2∩
E
3⊂
E
1i2
E
2∪
E
3⊂
E
1wi3
E
2w∪
E
3w⊂
E
1wProof:
(i1)
x
∈
E
2∩
E
3Let us show that x∈E1 by reductio ad absurdum. We assume that x∉E1. Then, there
exist an
x
*∈
D
such that
f
k(
x
*)
≤
f
k(
x
)
andγ
k(
g
k(
x
*))
≤
γ
k(
g
k(
x
))
, for every}
,...,
1
{
q
k
∈
, there being ans
∈
{
1
,...,
q
}
for which the inequality is strict,)
(
)
(
x
*f
x
f
s<
s orγ
s(
g
s(
x
*))
<
γ
s(
g
s(
x
))
.Therefore, x∉E2 or
x
∉
E
3, sinceγ
k(
g
k(
x
*))
≤
γ
k(
g
k(
x
))
, implies(
g
s0(
x
*))
≤
k k
γ
))
(
(
g
s0x
k k
γ
, contrary tox
∈
E
2∩
E
3.(i2 )
E
2∪
E
3⊂
E
1wLet
x
∈
E
2∪
E
3. Let us see thatx
∈
E
1w by reductio de absurdum. We assume thatw
E
x
∉
1 . Then, there exist a vectorx
*∈
D
that weakly dominates x and so verifies)
(
)
(
x
*f
x
f
k<
k andγ
k(
g
k(
x
*))
<
γ
k(
g
k(
x
))
, for everyk
=
{
1
,...,
q
}
. Thus, x∉E2and, since
(
g
(
x
*))
(
g
(
x
))
k k k
k
γ
γ
<
, implies(
g
s0(
x
*))
<
k k
γ
(
g
s0(
x
))
k k
γ
,x
∉
E
3, contrary tox
∈
E
2∪
E
3.(i3)
E
2w∪
E
3w⊂
E
1wLet
x
∈
E
2w∪
E
3w. Let us see thatx
∈
E
1w by reductio de absurdum. We assume thatw
E
x
∉
1 . Then, there exist a vectorx
*∈
D
that weakly dominates the vector x and therefore verifies thatf
k(
x
*)
<
f
k(
x
)
andγ
k(
g
k(
x
*))
<
γ
k(
g
k(
x
))
, for every}
,...,
1
{
q
k
∈
. Thus,x
∉
E
2w and, since(
g
(
x
*))
(
g
(
x
))
k k k
k
γ
γ
<
, implies<
))
(
(
g
s0x
*k k
γ
(
g
s0(
x
))
k k
Thus, (i2) can be deduced from (i3) □
Now we consider the following problem
(
(
)
(
(
)),...,
(
)
(
(
))
)
min
f
1x
1g
1x
f
qx
qg
qx
D
x∈
+
α
+
α
(2.6)where
α
=(α
1,...,α
q):R+ →Rq.Let E4(
α
) andE
4G(
α
)
denote the efficient solutions set and the properly efficient solutions set respectively for problem (2.6). We will now present some relations betweenthese sets and the set of efficient solutions and properly efficient solutions for problem
(PD1).
Theorem 2.2 [21]For
γ
=(γ
1,...,γ
q):R+ →Rq,α
=(α
1,...,α
q):R+ →Rq, with0
,
k≠
k
γ
α
and sign(α
k)=sign(γ
k),k =1,q, the following relation holds :1
4( ) E
E
α
⊂ .Proof: Let x∈E4(
α
). We assume that x∉E1. In this case, there is a solutionx
* that dominates the solution x, that is,)
(
)
(
x
*f
x
f
k≤
k andγ
k(
g
k(
x
*))
≤
γ
k(
g
k(
x
))
, for everyk
∈
{
1
,...,
q
}
, and thereexist at least one
s
∈
{
1
,...,
q
}
for which the inequality is strict, that is,)
(
)
(
x
*f
x
f
s<
s orγ
s(
g
s(
x
*))
<
γ
s(
g
s(
x
))
From this point onward, since
)
(
)
(
x
*f
x
f
k≤
k ,γ
k(
g
k(
x
*))
≤
γ
k(
g
k(
x
))
, impliesα
k(
g
k(
x
*))
≤
α
k(
g
k(
x
))
,the following inequalities are verified:
))
(
(
)
(
))
(
(
)
(
x
*g
x
*f
x
g
x
*f
k+
α
k k≤
k+
λ
k k , for everyk
∈
{
1
,...,
q
}
, (2.7)))
(
(
)
(
))
(
(
)
(
x
g
x
*f
x
g
x
f
k+
α
k k≤
k+
α
k k , for everyk
∈
{
1
,...,
q
}
. (2.8)From (2.7) and (2.8), we obtain
))
(
(
)
(
))
(
(
)
(
x
*g
x
*f
x
g
x
f
k+
α
k k≤
k+
α
k k , for everyk
∈
{
1
,...,
q
}
.In particular, for k =s, we have the results bellow:
(a) if
f
s(
x
*)
<
f
s(
x
)
,))
(
(
)
(
))
(
(
)
(
x
*g
x
*f
x
g
x
*and the following inequality is obtained from (2.8):
))
(
(
)
(
))
(
(
)
(
x
*g
x
*f
x
g
x
f
s+
α
s s<
s+
α
s s ;(b) if
α
s(
g
s(
x
*))
<
α
s(
g
s(
x
))
,))
(
(
)
(
))
(
(
)
(
x
*g
x
*f
x
*g
x
f
s+
α
s s<
s+
α
s s ,and since
f
s(
x
*)
≤
f
s(
x
)
, we obtain))
(
(
)
(
))
(
(
)
(
x
*g
x
*f
x
g
x
f
s+
α
s s<
s+
α
s s .Therefore, for every
k
∈
{
1
,...,
q
}
,))
(
(
)
(
))
(
(
)
(
x
*g
x
*f
x
g
x
f
k+
α
k k≤
k+
α
k k ,and there is at least a subscript
s
∈
{
1
,...,
q
}
for which))
(
(
)
(
))
(
(
)
(
x
*g
x
*f
x
g
x
f
s+
α
s s<
s+
α
s s ,which implies that the solution
x
* dominates the solution x; therefore, we reach a contradiction with the hypothesis ofx
* being the efficient solution to problem (2.6).■
Next, we prove that, in some conditions, this relationship is hold for the set of properly
efficient solution. For this purpose, we define problems
P
f,γg(
λ
,
μ
)
andP
α(
ξ
)
,obtained by applying the weighting method to problems (2.3)-(2.6) respectively as
follows:
∑
=∈ +
q
k
k k k t
D x g
f f x g x
P
1
, ( , )): min ( ) ( )
( γ
λ
μ
λ
μ
γ
,)) ( )
( ( min :
)) ( (
1
x g x
f
P k k k
q
k k D
x
ξ
α
ξ
α
∑
+=
∈ .
We use the results available in the literature about the relationships between the
optimal solution to the weighting problem and the efficient solutions to the
multi-objective problem. Some results, see Chankong and Haimes [29], applied to problem
(a) If f and (
γ
1g1,...,γ
qgq)t are convex functions, D is convex, andx
* is a properly efficient solution for the multi-objective problem (2.3), there exist some weightvector
λ
,
μ
with strictly positive components such thatx
* is the optimal solutionfor weighted problem
P
f,γg(
λ
,
μ
)
.(b) For each vector of weights with strictly positive components, the optimal solution to
the weighted problem
P
f,γg(
λ
,
μ
)
is properly efficient for the multi-objectiveproblem (P1).
Proposition 2.1 If
f
and(
γ
1(
g
1),...,
γ
q(
g
q))
are convex functions, D is a convex set and there existα
=(α
1,...,α
q):R+ →Rq ,sign
(
α
k)
=
sign
(
γ
k)
, for every}
,...,
1
{
q
k
∈
thenE
4G(
α
)
⊂
E
1G.Proof: If
f
and(
γ
1(
g
1),...,
γ
q(
g
q))
are convex functions and if D is a convex set, then the set of properly efficient solutions to problems (PD1) and (2.6) are obtained from theassociated weighted problems for strictly positive weight vectors. We will prove that any
solutions to the optimization problem
P
α(
ξ
)
, withξ
>
0
, is a solution to problem)
,
(
,γgλ
μ
fP
for some vector(
λ
,
μ
)
>
0
.Let
x
∈
E
4G(
α
)
. Then, given the established hypotheses, there exist a vectorξ
>
0
forwhich x is the solution for problem
P
α(
ξ
)
. Let us assume that, for every0
,
},
,...,
1
{
≠
∈
q
k kk
α
γ
. Then, we takek
k
ξ
λ
=
,μ
k=
ξ
kα
k/
γ
k,
λ
k,
μ
k>
0
,Since
ξ
>
0
, we obtain that x is an optimal solution to problemP
f,λg(
λ
,
μ
)
. For some}
,...,
1
{
q
i
∈
ifα
i=
γ
i=
0
, then the proof would be the same, since in problem (2.3) the functiong
i is not involved and since in problem (2.6) the function ith objective would bef
i. ■Example 2.1. Let us consider the following problem:
,
0
,
,
1
9
.
/
),
,
(
max
2 2
,
≥
≤
+
y
x
y
x
t
s
y
x
y x
with
f
(
x
,
y
)
=
x
,
g
(
x
,
y
)
=
y
,
u
=
1
.The set of efficient points for this problem is
{
(
x
,
y
)
t∈
R
2/
x
2+
4
y
2=
1
,
x
,
y
>
0
}
and is represented in Fig. 2.1.
We outline the solution of the problem
,
0
,
,
1
9
.
/
,
max
2 2
,
≥
≤
+
+
y
x
y
x
t
s
y
x
y
x
α
with
α
>0. For each fixedα
>0, the optimal solution of the resulting problem is one of property efficient solutions to the original becriterion problem.y
1
ε
D
3 x
Figura 2.1
Proposition 2.2 If
f
and(
γ
1(
g
1),...,
γ
q(
g
q))
are convex functions, thenU
Ω ∈
⊂
α
α
)
(
4 1G
G
E
E
,with
Ω
=
{
α
=
(
α
1,...,
α
q)
:
R
+→
R
qsign
(
α
k)
=
sign
(
γ
k),
k
=
1
,
q
}
.Proof: As the previous case, the proof of the proposition is carried out by demonstrating that any solution to the problem
P
f,γg(
λ
,
μ
)
is a solution to the problemP
α(
ξ
)
forConsider
x
∈
E
1G. Since f and (γ
1g1,...,γ
qgq)t areconvex functions, there exist vector0
,
μ
>
λ
such that x is a solution to problemP
fug(
λ
,
μ
)
. Becauseξ
,
μ
>
0
we putk
k
λ
ξ
=
,k k k
k
ξ
γ
μ
α
=
,since
ξ
,
μ
>
0
, therefore we obtain that x is also a solution to the problemP
α(
ξ
)
.□
From Proposition 2.1 and Proposition 2.2, if
f
and (γ
1g1,...,γ
qgq)t are convexfunctions and if
sign
(
α
k)
=
sign
(
γ
k)
,α
k(
t
).
γ
k(
t
)
>
0
, for everyk
∈
{
1
,...,
q
}
, the sets of properly efficient solutions to problem (2.3) and (2.6) verify the followingproperties:
a. Every properly efficient solution to problem (2.6) is properly efficient for problem
(2.3);
b. Setting
γ
∈
R
q, with nonnull components, the set of properly efficient solutions to problem (2.3) is a subset of the union inα
of the set of properly efficient solutionsfor problem (2.6).
2.4
Some relation between expected-value efficient solution,
minimum-variance efficient solution and expected-value standard deviation
efficient solution
Consider a problem (2.1) and sets efficient solution expected value (EPE) minimum
variance (
E
PEσ2), and expected value standard deviation (E
PEσ ) associated with theproblem. Let w PEw
PE w
PE E E
E , σ2, σ be the sets of weakly efficient solutions associated with
the problems in Definitions 2.1-2.3, respectively.
If we consider
)
(
)
(
),
(
)
(
x
z
x
g
x
x
f
k=
k k=
σ
k2.5 Multi-criteria problems
Consider the following model of a multi-criteria optimization problem:
(
(
),...,
(
)
)
min
F
1x
F
qx
(2.8)D
x∈ (2.9)
where D is a nonempty set of all feasible solution,
D
⊂
R
m;F
1,...,
F
q:
D
→
R
. Stated briefly, a multi-criteria optimization problem consists in the choice of a particularsolution
x
*∈
D
for which all of the utility functions Fk(x),k=1,q, simultaneouslyapproach bigger values or at least do not decrease.
Let us recall some concepts of multi-criteria optimization problem solutions; (Zeleny
[217] and Urli and Nadeau [196], Salukavadze and Topchishvili [166]).
Definition 2.6 The solution
x
P∈
D
is called Pareto-optimal (or efficient) for the problem (2.8)-(2.9) if and only if, for every x∈D, the system of inequalities)
(
)
(
k Pk
x
F
x
F
<
,k
=
1
,
q
,where at least one inequality is strict, is inconsistent.Definition 2.7The solution
x
w∈
D
, is called weakly efficient (or Slater-optimal) for the problem (2.8)-(2.9) if and only if, for every x∈D, the system of strict inequalities)
(
)
(
k wk
x
F
x
F
<
,k
=
1
,
q
, is inconsistent.Definition 2.8 The solution
x
G∈
D
, is called proper efficient (or Geoffrion-optimal) for the problem (2.8)-(2.9) if and only if it is a Pareto-optimal solution for the problem(2.8)-(2.9) and there exists a positive number
θ
>0 such that, for eachk
=
1
,
p
, we haveθ
≤ −
− ( )]/[ ( ) ( )] )
(
[F x F x F xG Fj x
j G k
k ,
for some j such that Fj(x) > Fj(xG) where x∈D and
F
k(
x
)
<
F
k(
x
G)
k
=
1
,
q
, is inconsistent.Let Ewj,
E
,
EGj denoted the sets of weakly-efficient, efficient, and proper efficientsolutions, respectively, for the problem (2.8)-(2.9). It is obvious that
G j
Next we will studied some relations between the efficient sets of several problems of
deterministic multi-objective programming.
Let
f
andg
be vectorial functions defined on the same set H ⊆Rn, with qR
H
f
:
→
andg
:
H
→
R
+q. Let us consider the following multi-objective problems:(P1)
min
(
f
1(
x
),...,
f
q(
x
),
u
1(
g
1(
x
)),...,
u
q(
g
q(
x
))
)
D
x∈ (2.10)
(P2)
min
(
f
1(
x
),...,
f
q(
x
)
)
Dx∈ (2.11)
(P3) min
(
u1(g10(x)),...,u (g 0(x))))
s q q s
D
x∈ (2.12)
with,
D
⊆
H
,u
:
R
+→
R
q,u
=
(
u
1,...,
u
q)
ands
0>
0
a real number.2.6 Relations between classes of solutions for (P1), (P2) and (P3)
We present some relations between the efficient sets of above considered deterministic
multi-objective programming problems. These results will be used later for analysis of
concepts of efficient solutions for multi-objective stochastic problems. These results
extend Section 2.4.
For
i
=
1
,
2
,
3
, letE
iw,
E
i,
E
iG