BAB II
LANDASAN TEORI
Pada bab ini akan dibahas mengenai teori yang mendukung dalam pembuatan Proyek Akhir ini. Materi yang akan dibahas adalah teori pengaturan, sistem kontrol otomatis, teori sensor, teori filter, photodioda, LED infra merah, mikrokontroler ATMega8535, relay, motor DC, solenoid, dan pemograman mengunakan BASCOM AVR.
2.1. Teori Pengaturan
Sistem kontrol adalah proses pengaturan ataupun pengendalian terhadap satu atau beberapa besaran (variabel, parameter) sehingga berada pada suatu harga atau dalam suatu rangkuman harga (range) tertentu. Di dalam dunia industri, dituntut suatu proses kerja yang aman dan berefisiensi tinggi untuk menghasilkan produk dengan kualitas dan kuantitas yang baik serta dengan waktu yang telah ditentukan. Otomatisasi sangat membantu dalam hal kelancaran operasional, keamanan (investasi, lingkungan), ekonomi (biaya produksi), mutu produk, dan lain-lain.
Gabungan kerja dari berbagai alat-alat kontrol dalam proses produksi dinamakan sistem pengontrolan proses (process control system). Sedangkan semua peralatan yang membentuk sistem pengontrolan disebut pengontrolan instrumentasi proses (process control instrumentation). Dalam istilah ilmu kendali, kedua hal tersebut berhubungan erat, namun keduanya sangat berbeda hakikatnya. Pembahasan disiplin ilmu Process Control Instrumentation lebih kepada pemahaman tentang kerja alat instrumentasi, sedangkan disiplin ilmu. Process Control System mengenai sistem kerja suatu proses produksi.
Sumber: http://eprints.undip.ac.id
2.2. Sistem Kontrol Otomatis
Suatu sistem kontrol otomatis dalam suatu proses kerja berfungsi mengendalikan proses tanpa adanya campur tangan manusia (otomatis). Ada dua sistem kontrol pada sistem kendali/kontrol otomatis yaitu :
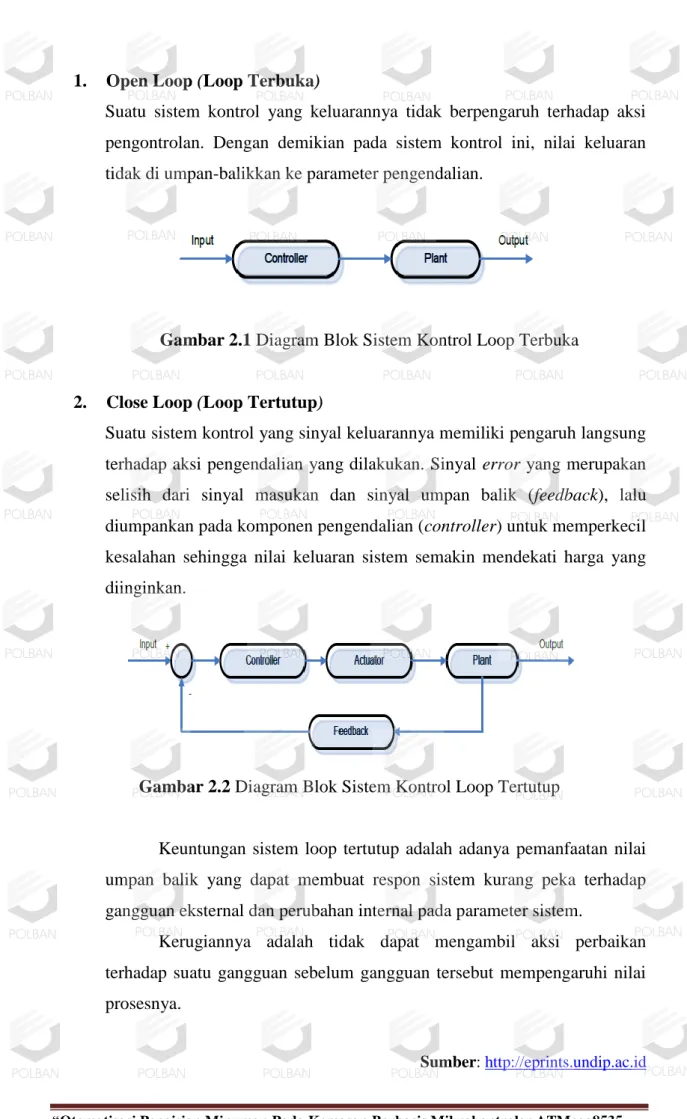
1. Open Loop (Loop Terbuka)
Suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontrol ini, nilai keluaran tidak di umpan-balikkan ke parameter pengendalian.
Gambar 2.1 Diagram Blok Sistem Kontrol Loop Terbuka
2. Close Loop (Loop Tertutup)
Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan. Sinyal error yang merupakan selisih dari sinyal masukan dan sinyal umpan balik (feedback), lalu diumpankan pada komponen pengendalian (controller) untuk memperkecil kesalahan sehingga nilai keluaran sistem semakin mendekati harga yang diinginkan.
Gambar 2.2 Diagram Blok Sistem Kontrol Loop Tertutup
Keuntungan sistem loop tertutup adalah adanya pemanfaatan nilai umpan balik yang dapat membuat respon sistem kurang peka terhadap gangguan eksternal dan perubahan internal pada parameter sistem.
2.3. Teori Sensor
Gambar 2.3 Jenis Sensor dan Transduser
Sensor adalah peralatan yang digunakan untuk merubah suatu besaran fisik menjadi besaran listrik sehingga dapat dianalisa dengan rangkaian listrik tertentu. Hampir seluruh peralatan elektronik yang ada mempunyai sensor didalamnya. Pada saat ini, sensor tersebut telah dibuat dengan ukuran sangat kecil. Ukuran yang sangat kecil ini sangat memudahkan pemakaian dan menghemat energi.
Sensor merupakan bagian dari transducer yang berfungsi untuk melakukan sensing atau “merasakan dan menangkap” adanya perubahan energi eksternal yang akan masuk ke bagian input dari transducer, sehingga perubahan kapasitas energi yang ditangkap segera dikirim kepada bagian konvertor dari transducer untuk dirubah menjadi energi listrik.
Transducer adalah alat yang berfungsi untuk mengubah suatu bentuk energi tertentu ke dalam bentuk energi lain, dalam hal ini biasanya selalu diubah kedalam bentuk energi listrik.
Transducer dapat diklasifikasikan berdasarkan cara pengubahan energi sinyal keluaran atau berdasarkan bidang pemakaian, dan dibagi menjadi:
1. Active Transducer adalah jenis transducer yang mampu menghasilkan energi listrik sendiri, contohnya : fotosel, termokopel dan lain-lain.
2. Passive Transducer adalah jenis transducer yang memerlukan catu daya (power supply) eksternal untuk dapat bekerja, contohnya : photodioda.
2.4. Teori Filter
Filter adalah sebuah rangkaian yang dirancang agar melewatkan suatu pita frekuensi tertentu seraya memperlemah semua isyarat diluar pita frekuensi ini. Jaringan-jaringan filter bersifat aktif maupun pasif. Jaringan-jaringan filter pasif hanya berisi tahanan, induktor, dan kapasitor saja. Fiter-filter aktif menggunakan tyransistor atau op-amp ditambah tahanan, induktor, dan kapasitor. Tetapi induktor jarang digunakan dalam filter-filter aktif, sebab ukurannya besar dan mahal dan bisa memiliki komponen-komponen bertahanan dalam yang besar.
Karakteristik Filter berdasarkan jenisnya adalah: 1. Lowpass Filter
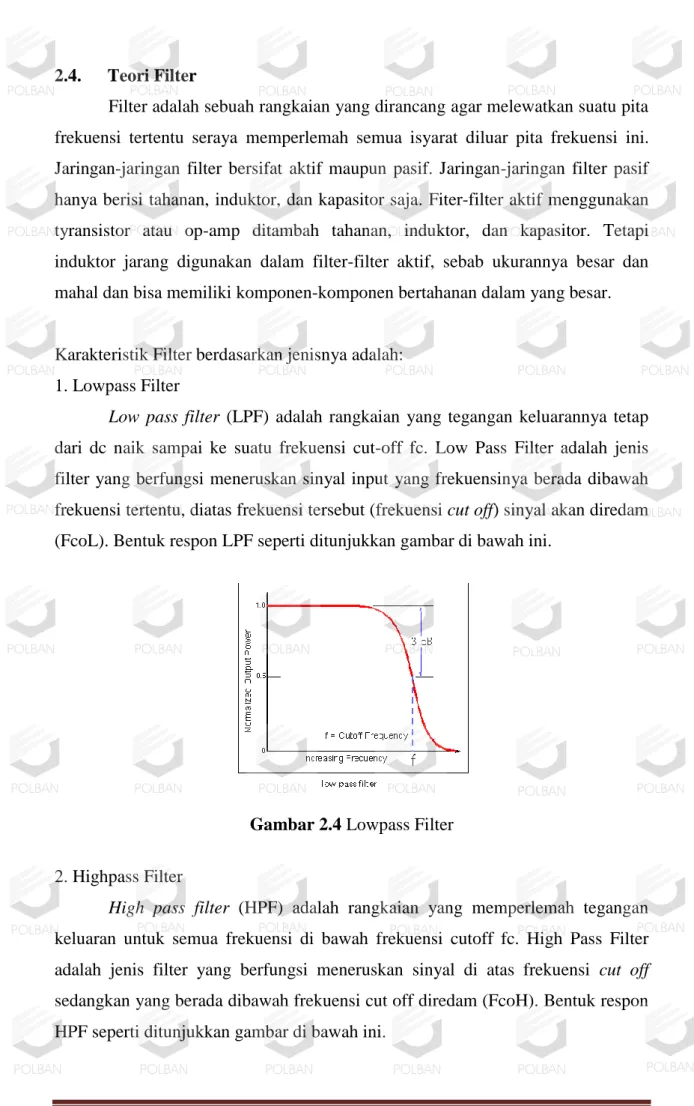
Low pass filter (LPF) adalah rangkaian yang tegangan keluarannya tetap dari dc naik sampai ke suatu frekuensi cut-off fc. Low Pass Filter adalah jenis filter yang berfungsi meneruskan sinyal input yang frekuensinya berada dibawah frekuensi tertentu, diatas frekuensi tersebut (frekuensi cut off) sinyal akan diredam (FcoL). Bentuk respon LPF seperti ditunjukkan gambar di bawah ini.
Gambar 2.4 Lowpass Filter 2. Highpass Filter
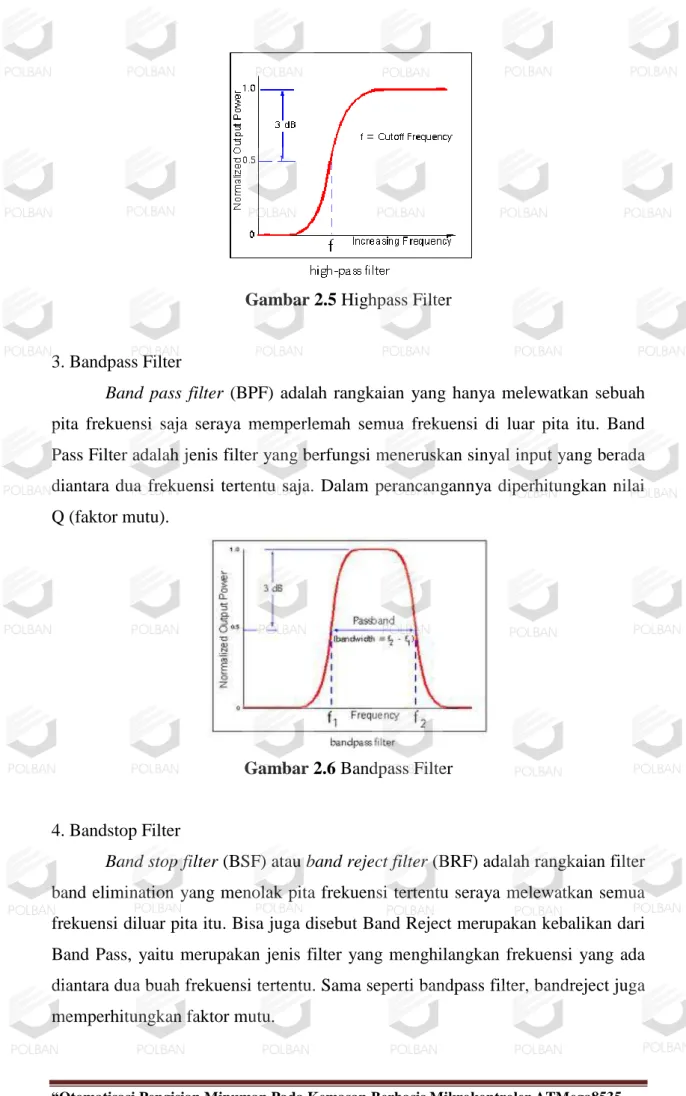
High pass filter (HPF) adalah rangkaian yang memperlemah tegangan keluaran untuk semua frekuensi di bawah frekuensi cutoff fc. High Pass Filter adalah jenis filter yang berfungsi meneruskan sinyal di atas frekuensi cut off sedangkan yang berada dibawah frekuensi cut off diredam (FcoH). Bentuk respon HPF seperti ditunjukkan gambar di bawah ini.
Gambar 2.5 Highpass Filter
3. Bandpass Filter
Band pass filter (BPF) adalah rangkaian yang hanya melewatkan sebuah pita frekuensi saja seraya memperlemah semua frekuensi di luar pita itu. Band Pass Filter adalah jenis filter yang berfungsi meneruskan sinyal input yang berada diantara dua frekuensi tertentu saja. Dalam perancangannya diperhitungkan nilai Q (faktor mutu).
Gambar 2.6 Bandpass Filter
4. Bandstop Filter
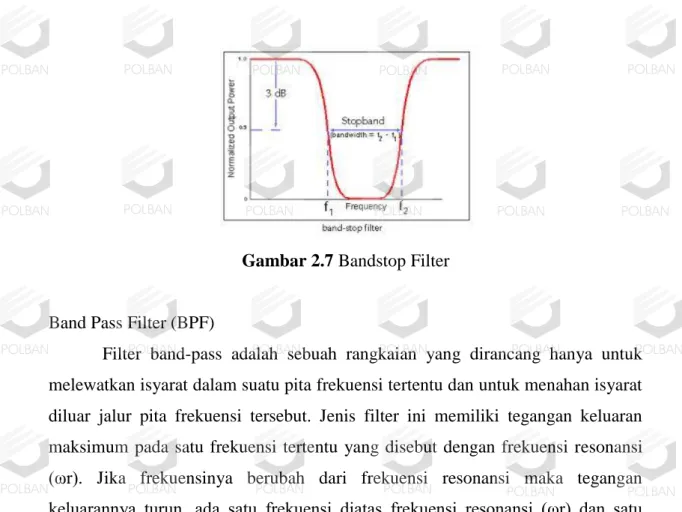
Band stop filter (BSF) atau band reject filter (BRF) adalah rangkaian filter band elimination yang menolak pita frekuensi tertentu seraya melewatkan semua frekuensi diluar pita itu. Bisa juga disebut Band Reject merupakan kebalikan dari Band Pass, yaitu merupakan jenis filter yang menghilangkan frekuensi yang ada diantara dua buah frekuensi tertentu. Sama seperti bandpass filter, bandreject juga memperhitungkan faktor mutu.
Gambar 2.7 Bandstop Filter
Band Pass Filter (BPF)
Filter band-pass adalah sebuah rangkaian yang dirancang hanya untuk melewatkan isyarat dalam suatu pita frekuensi tertentu dan untuk menahan isyarat diluar jalur pita frekuensi tersebut. Jenis filter ini memiliki tegangan keluaran maksimum pada satu frekuensi tertentu yang disebut dengan frekuensi resonansi (ωr). Jika frekuensinya berubah dari frekuensi resonansi maka tegangan keluarannya turun, ada satu frekuensi diatas frekuensi resonansi (ωr) dan satu dibawah (ωr) dimana gainnya tetap 0,707 Ar. Frekuensi ini diberi tanda (ωh) frekuensi cutoff atas dan (ωl) frekuensi cutoff bawah. Pita frekuensi antara (ωh) dan (ωl) adalah band width (B).
B = ωh – ωl ... (1)
Rangkaian Band Pass Filter (BPF) RC
Nilai frekuensi cut-off atas ditentukan oleh filter high-pass sebagai berikut : ... (2) dan frekuensi cut-off bawah ditentukan oleh filter low-pass sebagai berikut :
... (3) sehingga besarnya bandwidth adalah :
B = ... (4)
Karakteristik Band Pass Filter (BPF) RC
Filter band-pass dapat digolongkan sebagai pita sempit atau pita lebar. Filter pita sempit adalah sebuah filter yang mempunyai band width lebih kecil dari sepersepuluh frekuensi resonansinya (B<0,1 ). jika band width-nya lebih besar sepersepuluh dari frekuensi resonansi maka (B>0,1ωr), filter tersebut merupakan sebuah filter pita lebar. Perbandingan antara frekuensi resonansi dan lebar pita dikenal sebagai faktor kualitas (Q) dari rangkaiannya. Q menunjukan selektifitas dari rangkaian, makin tinggi nilai Q makin selektif rangkaian filter tersebut.
Q =
... (5)
B = ... (6)
2.5. Rangkaian Sensor Photodioda dan Infra merah
Rangkaian sensor ini menggunakan Photodioda dan led infra merah (IR) yang dihubungkan secara optik. Photodioda akan aktif apabila terkena cahaya dari led IR. Antara led IR dan Photodioda dipisahkan oleh jarak. Jauh dekatnya jarak mempengaruhi besar intensitas cahaya yang diterima oleh Photodioda. Apabila antara led IR dan Photodioda tidak terhalang oleh benda, maka Photodioda akan aktif.
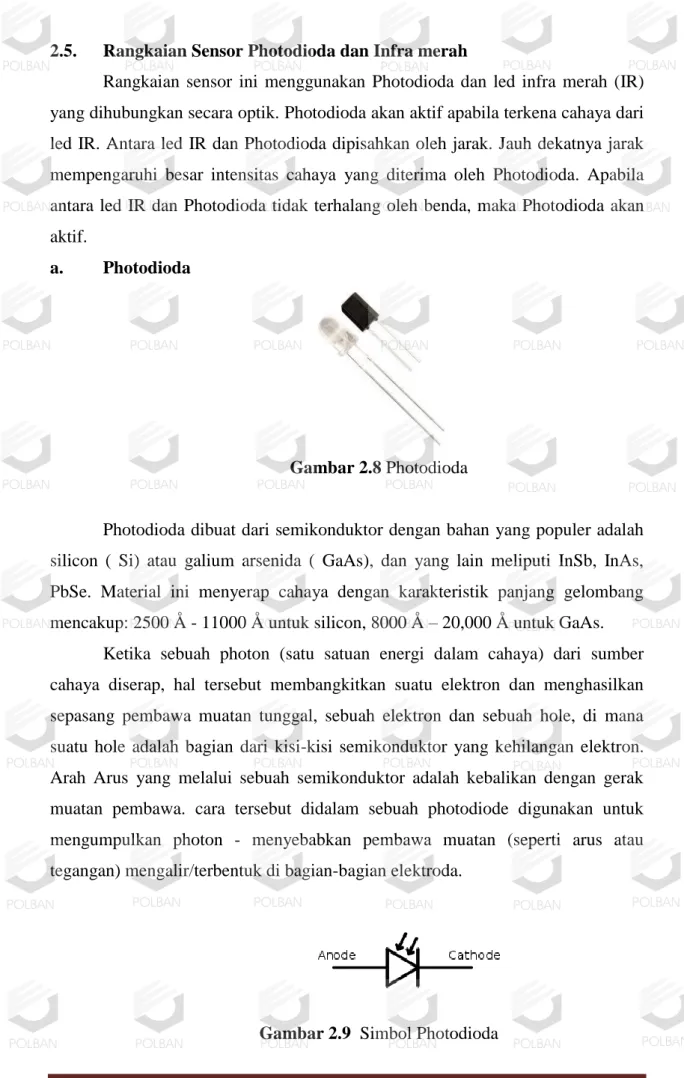
a. Photodioda
Gambar 2.8 Photodioda
Photodioda dibuat dari semikonduktor dengan bahan yang populer adalah silicon ( Si) atau galium arsenida ( GaAs), dan yang lain meliputi InSb, InAs, PbSe. Material ini menyerap cahaya dengan karakteristik panjang gelombang mencakup: 2500 Å - 11000 Å untuk silicon, 8000 Å – 20,000 Å untuk GaAs.
Ketika sebuah photon (satu satuan energi dalam cahaya) dari sumber cahaya diserap, hal tersebut membangkitkan suatu elektron dan menghasilkan sepasang pembawa muatan tunggal, sebuah elektron dan sebuah hole, di mana suatu hole adalah bagian dari kisi-kisi semikonduktor yang kehilangan elektron. Arah Arus yang melalui sebuah semikonduktor adalah kebalikan dengan gerak muatan pembawa. cara tersebut didalam sebuah photodiode digunakan untuk mengumpulkan photon - menyebabkan pembawa muatan (seperti arus atau tegangan) mengalir/terbentuk di bagian-bagian elektroda.
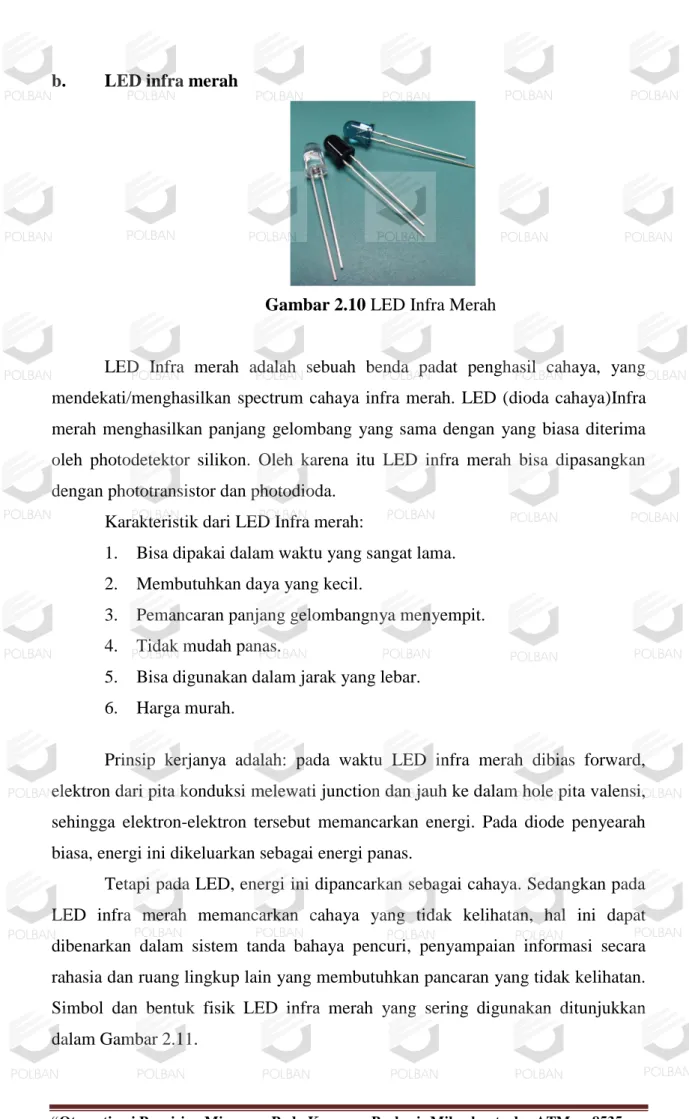
b. LED infra merah
Gambar 2.10 LED Infra Merah
LED Infra merah adalah sebuah benda padat penghasil cahaya, yang mendekati/menghasilkan spectrum cahaya infra merah. LED (dioda cahaya)Infra merah menghasilkan panjang gelombang yang sama dengan yang biasa diterima oleh photodetektor silikon. Oleh karena itu LED infra merah bisa dipasangkan dengan phototransistor dan photodioda.
Karakteristik dari LED Infra merah:
1. Bisa dipakai dalam waktu yang sangat lama. 2. Membutuhkan daya yang kecil.
3. Pemancaran panjang gelombangnya menyempit. 4. Tidak mudah panas.
5. Bisa digunakan dalam jarak yang lebar. 6. Harga murah.
Prinsip kerjanya adalah: pada waktu LED infra merah dibias forward, elektron dari pita konduksi melewati junction dan jauh ke dalam hole pita valensi, sehingga elektron-elektron tersebut memancarkan energi. Pada diode penyearah biasa, energi ini dikeluarkan sebagai energi panas.
Gambar 2.11 Simbol LED IR
Sumber: http://lilik.guru-indonesia.net
2.6. Mikrokontroler
Dalam sistem ini digunakan sebuah mikrokontroler sebagai pengendali sistem secara keseluruhan atau sebagai otak utamanya.Mikrokontroler adalah suatu sistem mikroprosesor yang lengkap dan dikemas dalam bentuk sebuah IC (single chip). IC mikrokontroler memiliki perangkat penunjang seperti yang terdapat dalam mikrokomputer yaitu unit pusat pengolahan data (Central Processing Unit), unit memori (ROM dan RAM) dan unit I/O. Selain itu terdapat juga fasilitas -fasilitas seperti timer, counter, dan kontrol interupsi (Interrupt Control).
Mikrokontroler yang digunakan dalam proyek akhir ini adalah tipe AVR ATmega8535, memiliki fitur yang cukup lengkap. Fitur-fitur yang dimiliki oleh mikrokontroler ATmega8535 adalah sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D. 2. ADC internal sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 7. Port antarmuka SPI
8. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 9. Antarmuka komparator analog.
10. Port USART untuk komunikasi serial.
2.1.1 Konstruksi ATmega8535
Mikrokontroler ATmega8535 memiliki 3 jenis memori, yaitu memori program, memori data dan memori EEPROM. Ketiganya memiliki ruang sendiri dan terpisah, sebagai berikut:
a. Memori program
ATmega8535 memiliki kapasitas memori progam sebesar 8 Kbyte yang terpetakan dari alamat 0000h – 0FFFh dimana masing-masing alamat memiliki lebar data 16 bit. Memori program ini terbagi menjadi 2 bagian yaitu bagian program boot dan bagian program aplikasi.
b. Memori data
ATmega8535 memiliki kapasitas memori data sebesar 608 byte yang terbagi menjadi 3 bagian yaitu register serba guna, register I/O dan SRAM. ATmega8535 memiliki 32 byte register serba guna, 64 byte register I/O yang dapat diakses sebagai bagian dari memori RAM (menggunakan instuksi LD atau ST) atau dapat juga diakses sebagai I/O (menggunakan instruksi IN atau OUT), dan 512 byte digunakan untuk memori data SRAM.
c. Memori EEPROM
ATmega8535 memiliki memori EEPROM sebesar 512 byte yang terpisah dari memori program maupun memori data. Memori EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Address, register EEPROM Data, dan register EEPROM Control. Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal, sehingga waktu eksekusinya relatif lebih lama bila dibandingkan dengan mengakses data dari SRAM.
ATmega8535 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran ADC internal dengan fidelitas 10 bit. Dalam mode operasinya, ADC ATmega8535 dapat dikonfigurasi, baik secara single ended input maupun differential input. Selain itu, ADC ATmega8535 memiliki konfigurasi pewaktuan, tegangan referensi, mode operasi, dan kemampuan filter derau yang amat fleksibel, sehingga dengan mudah disesuaikan dengan kebutuhan ADC itu sendiri.
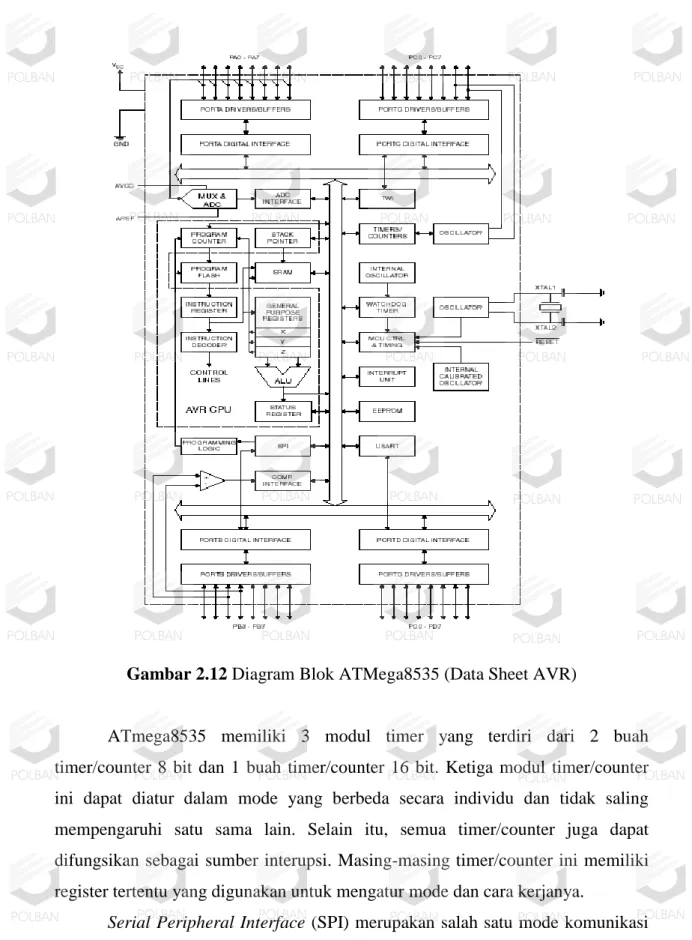
Gambar 2.12 Diagram Blok ATMega8535 (Data Sheet AVR)
ATmega8535 memiliki 3 modul timer yang terdiri dari 2 buah timer/counter 8 bit dan 1 buah timer/counter 16 bit. Ketiga modul timer/counter ini dapat diatur dalam mode yang berbeda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu, semua timer/counter juga dapat difungsikan sebagai sumber interupsi. Masing-masing timer/counter ini memiliki register tertentu yang digunakan untuk mengatur mode dan cara kerjanya.
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi serial syncrhronous kecepatan tinggi yang dimiliki oleh ATmega8535. Universal Syncrhronous and Asyncrhronous Serial Receiver and Transmitter (USART) juga merupakan salah satu mode komunikasi serial yang dimiliki oleh ATmega8535. USART merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat
digunakan untuk melakukan transfer data baik antar mikrokontroler maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART.
USART memungkinkan transmisi data baik secara syncrhronous maupun asyncrhronous, sehingga dengan memiliki USART pasti kompatibel dengan UART. Pada ATmega8535, secara umum pengaturan mode syncrhronous maupun asyncrhronous adalah sama. Perbedaannya hanyalah terletak pada sumber clock saja. Jika pada mode asyncrhronous masing-masing peripheral memiliki sumber clock sendiri, maka pada mode syncrhronous hanya ada satu sumber clock yang digunakan secara bersama-sama.
2.1.2 Pin-pin pada Mikrokontroler ATmega8535
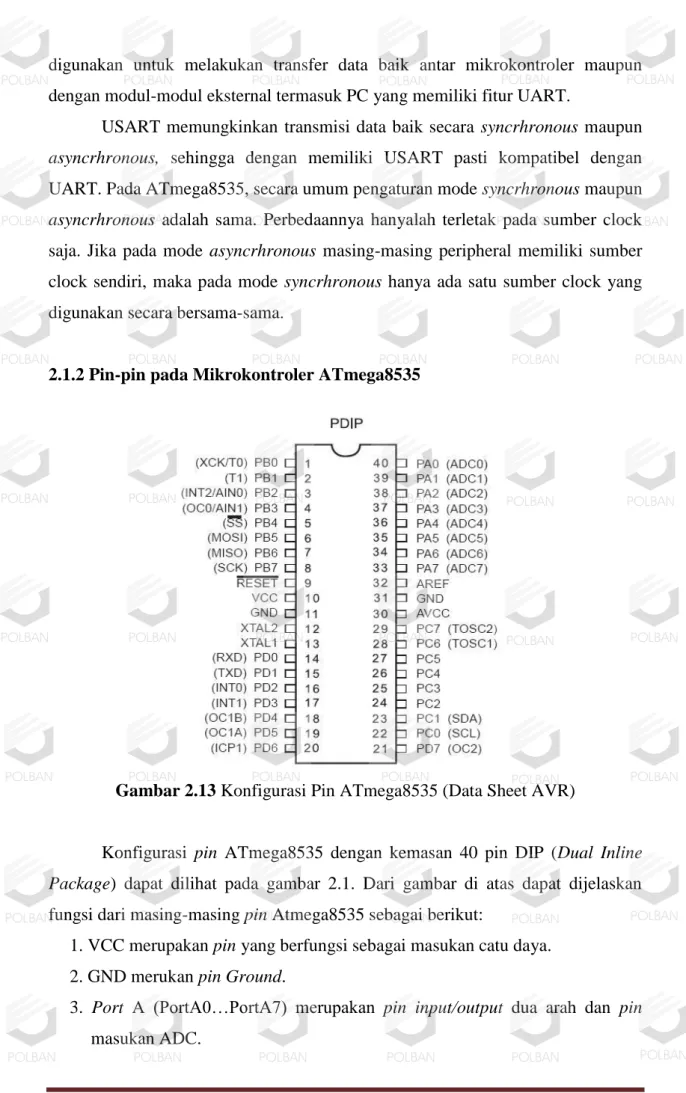
Gambar 2.13 Konfigurasi Pin ATmega8535 (Data Sheet AVR)
Konfigurasi pin ATmega8535 dengan kemasan 40 pin DIP (Dual Inline Package) dapat dilihat pada gambar 2.1. Dari gambar di atas dapat dijelaskan fungsi dari masing-masing pin Atmega8535 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merukan pin Ground.
4. Port B (PortB0…PortB7) merupakan pin input/output dua arah dan dan pin fungsi khusus, seperti dapat dilihat pada tabel di bawah ini.
Tabel 2.1 Fungsi Khusus Port B
Pin Fungsi Khusus
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/ Slave Output) PB5 MOSI (SPI Bus Master Output/ Slave Input)
PB4 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input) OC0 (Timer/Counter0 Output Compare Match Output) PB2 AIN0 (Analog Comparator Positive Input)
INT2 (External Interrupt 2 Input) PB1 T1 (Timer/ Counter1 External Counter Input) PB0 T0 T1 (Timer/Counter External Counter Input)
XCK (USART External Clock Input/Output) 5. Port C (PortC0…PortC7) merupakan pin input/output dua arah dan pin
fungsi khusus, seperti dapat dilihat pada tabel dibawah ini. Tabel 2.2 Fungsi Khusus Port C
Pin Fungsi khusus
PC7 TOSC2 ( Timer Oscillator Pin2)
PC6 TOSC1 ( Timer Oscillator Pin1)
PC5 Input/Output
PC4 Input/Output
PC3 Input/Output
PC2 Input/Output
PC1 SDA ( Two-wire Serial Buas Data Input/Output Line) PC0 SCL ( Two-wire Serial Buas Clock Line)
6. Port D (PortD0…PortD7) merupakan pin input/output dua arah dan pin fungsi khusus, seperti yang terlihat pada tabel dibawah ini.
Tabel 2.3 Fungsi Khusus Port D
Pin Fungsi khusus
PD7 OC2 (Timer/Counter Output Compare Match Output) PD6 ICP (Timer/Counter1 Input Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match Output) PD4 OC1B (Timer/Counter1 Output Compare B Match Output) PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC. 10. AREFF merupakan pin masukan tegangan referensi ADC.
Sumber: http://digilib.ittelkom.ac.id
2.7. Relay
Gambar 2.14 Relay
Relay merupakan salah satu peralatan elektronik yang berfungsi untuk memtuskan dan mehubungkan suatu rangkaian elektronik yang satu dengan yang lainnya. Pada dasarnya relay adalah saklar elektromagnetik yang akan bekerja apabila arus mengalir melalui kumparan, lalu inti besi akan menjadi magnet dan akan menarik kontak-kontak relay. Kontak-kontak dapat ditarik apabila garis magnet dapat mengalahkan gaya pegas yang melawannya. Besarnya gaya magnet bergantung dari medan di celah udara pada inti magnet, jumlah lilitan kumparan, dan kuat arus yang mengalir. Untuk memperbesar kuat medan magnet dibentuk sirkuit magnet.
Kontak-kontak atau kutub-kutub dari relay umumnya memiliki tiga dasar pemakaian yaitu :
1. Bila kumparan dialiri arus listrik maka kontaknya akan menutup dan disebut sebagai kontak Normally Open (NO).
2. Bila kumparan dialiri arus listrik maka kontaknya akan membuka dan disebut dengan kontak Normally Close (NC).
3. Tukar-sambung (Change Over/CO), jenis relay ini mempunyai kontak tengah yang normalnya tertutup tetapi akan membuat kontak dengan yang lain bila relay dialiri listrik.
Berikut ini memperlihatkan beberapa bentuk kontak dari sebuah relay :
Gambar 2.15 Jenis Konstruksi Relay
Sumber: http://lionjogja.20m.com/relay
2.8. Motor DC
Gambar 2.16 Motor DC
Motor DC adalah sebuah mesin yang berfungsi mengubah tegangan listrik arus searah menjadi tenaga gerak atau tenaga mekanik, tenaga gerak tersebut berupa putaran dari rotor.
Motor DC terdiri dari 2 bagian, yakni bagian stator (bagian yang diam) dan bagian rotor (bagian yang bergerak/berputar). Bagian Stator terdiri dari :
• Pelindung Mesin
Pelindung mesin memiliki fungsi sebagai tempat jalannya fluksi magnet dan sebagai tempat pegangan bagian lain.
• Kutub Magnet
Kutub magnet pada bagian stator berfungsi sebagai pendistribusi fluksifluksi magnet ke bagian rotor.
• Belitan Kutub Magnet
Belitan kutub magnet berfungsi sebagai pembangkit fluksi magnet yang membentuk kutub-kutub magnet.
• Terminal
Terminal sebagai sarana atau tempat penyambungan kabel atau penghantar.
• Bearing
Bearing sebagai bantalan luncur rotor atau sebagai alat mempertahankan posisi rotor.
• Sikat
Sikat sebagai sarana pendistribusian besaran arus listrik dari bagian stator ke bagian rotor atau dari bagian rotor ke bagian stator.
Sedangkan bagian rotor, terdiri dari : • Inti Rotor
Inti rotor berfungsi sebagai tempat jalannya fluksi magnet dan sebagai pemegang belitan rotor.
• Lilitan Rotor atau Belitan Jangkar
Lilitan rotor atau belitan jangkar berfungsi sebagai tempat jalannya arus listrik.
• Komutator
Komutator berfungsi sebagai alat pengubah arus AC pada belitan motor menjadi arus DC.
• Poros Rotor
Poros rotor merupakan bagian rotor yang berfungsi sebagai tempat penjaga posisi rotor.
• Lamel
Lamel merupakan bagian dari komutator yang berfungsi sebagai untuk menghubungkan belitan rotor ke sikat.
Prinsip dasar Motor DC didasarkan pada suatu gejala bahwa jika suatu penghantar yang berarus dilewatkan pada magnet maka akan menghasilkan suatu gaya gerak. Arah gerak dari penghantar tersebut ditentukan dengan kaidah tangan kiri. Besar gaya gerak yang dihasilkan dapat dihitung melalui persamaan:
F = BIl (N) ... (7)
Dimana :
B = Kepadatan flux magnet (Weber) I = Arus listrik yang mengalir (Ampere) l = Panjang penghantar (Cm)
Gambar 2.17 Arah Putaran Pada Kumparan
Apabila penghantar terletak disekeliling rotor motor DC, maka akan timbul suatu gerak putar pada penghantar tadi. Karena gerak putar tersebut terjadi akibat adanya pengaruh medan magnet di sekitar rotor tadi. Apabila beban yang bekerja pada motor tidak berubah-ubah, maka timbul suatu daya (W), Torsi (Nm) dan kecepatan sudut ω (rad/s) dan dapat dituliskan kedalam persamaan :
P = VxI (Watt) ... (8) T = (Nm) ... (9)
ω = .
... (10)
Berikut adalah berbagai metode pengaturan kecepatan pada motor DC : 1. Pengaturan kecepatan dengan mengatur medan shunt.
Metode ini dilakukan dengan cara menyisipkan tahanan variable yang dipasang secara seri terhadap kumparan medannya.
2. Pengaturan kecepatan dengan mengatur tahanan jangkar.
Metode ini dilakukan dengan cara menyisipkan tahanan secara seri terhadap tahanan jangkar motor, karena hubungan seri menjadikan rugi panas besar.
3. Pengaturan kecepatan dengan mengatur tegangan masukannya.
Metode ini dilakukan dengan cara mengatur tahanan medannya, cara ini memiliki batas yang lebar.
Sumber: http://staff.ui.ac.id
2.9. Solenoid
Gambar 2.18 Solenoid
Solenoid adalah salah satu jenis kumparan terbuat dari kabel panjang yang dililitkan secara rapat dan dapat diasumsikan bahwa panjangnya jauh lebih besar daripada diameternya. Dalam kasus solenoid ideal, panjang kumparan adalah tak hingga dan dibangun dengan kabel yang saling berhimpit dalam lilitannya, dan medan magnet di dalamnya adalah seragam dan paralel terhadap sumbu solenoid.
Kuat medan magnet untuk solenoid ideal adalah:
di mana:
adalah kuat medan magnet,
adalah permeabilitas ruang kosong,
adalah kuat arus yang mengalir,
adalah jumlah lilitan.
Jika terdapat batang besi dan ditempatkan sebagian panjangnya di dalam solenoid, batang tersebut akan bergerak masuk ke dalam solenoid saat arus dialirkan. Hal ini dapat dimanfaatkan untuk menggerakkan tuas, membuka pintu, atau mengoperasikan relay.
Sumber: http://id.wikipedia.org/wiki/solenoid
2.10. Perangkat lunak
Pemrograman mikrokontroler ATmega8535 dapat menggunakan low level language (assembly) dan high level language (C, Basic, Pascal, JAVA,dll) tergantung compiler yang digunakan (Widodo Budiharto, 2006). Bahasa Assembler mikrokontroler AVR memiliki kesamaan instruksi, sehingga jika pemrograman satu jenis mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis mikrokontroler AVR. Namun bahasa assembler relatif lebih sulit dipelajari dari pada bahasa C.
Salah satu software aplikasi yang dapat digunakan untuk pemrograman mikrokontroller keluarga AVR adalah BASCOM (Basic Compiler) AVR. BASCOM AVR ini menggunakan high level language yang merupakan pengembangan dari bahasa Basic. Compiler ini berfungsi untuk mengubah format program kedalam format hexsadesimal agar program yang telah dibuat dapat dimengerti oleh mikrokontroler.
Kumpulan karakter pada BASCOM terdiri dari karakter alphabet, karakter angka, dan karakter khusus. Karakter alphabet dalam BASCOM terdiri dari huruf kapital (A-Z) dan huruf kecil (a-z). Sedangkan karakter angka pada BASCOM adalah 0-9. Huruf A-H dapat digunakan sebagai bagian angka heksadesimal. Gambar 2.13 merupakan main windows pada BASCOM AVR.
Gambar 2.19 Main Windows pada BASCOM AVR
1. Baris Program BASCOM
BASCOM memiliki baris program dengan syntax sebagai berikut : [[line identifier]] [[statement]] [[:statement]] ... [[comment]]
2. Penggunaan Line Identifiers
BASCOM mendukung satutipe line identifier atau pengenal baris yaitu label baris alfa numerik. Sebuah label baris alfabet dapat terdiri dari 1-32 huruf dan angka yang diawali dengan sebuah huruf kemudian diakhiri dengan sebuah titik dua (:). Kata kunci BASCOM tidak diperbolehkan untuk dijadikan sebagai label .
Label dapat dimulai di kolom berapapun, selama karakter pertama bukan kosong atau spasi pada baris. Spasi tidak diperbolehkan diantara label titik dua (:) atau setelahnya. Sebuah baris hanya boleh memiliki sebuah label. Ketika ada label pada suatu baris maka tidak ada pengenal baris lainnya yang dapat digunakan pada baris yang sama. Penggunaan huruf kecil dengan huruf kapital pada BASCOM memberikan arti yang sama.
Sebuah pernyataan BASCOM bisa “dieksekusi” atau “tidak dieksekusi”. Sebuah pernyataan dieksekusi melanjutkan aliran sebuah logika program dengan memberitahu program apa yang akan dilakukan selanjutnya. Sedangkan program tidak dieksekusi melakukan tugas seperti mengalokasikan penyimpanan untuk variabel, deklarasi, dan menentukan tipe variabel. Contoh dari pernyataan ini adalah “DIM” dan “REM”.
Sebuah komentar adalah pernyataan tidak dieksekusi yang digunakan untuk penjelasan program atau lainnya. Komentar dinyatakan dengan pernyataan REM atau tanda petik tunggal ('). Lebih dari satu pernyataan dapat ditempatkan pada satu baris, tetapi dengan menggunakan tanda pemisah (:).
3. Tipe Data
Variabel dalam BASCOM memiliki sebuah tipe data yang menentukan apa yang dapat disimpan dalam variabel. Berikut ini adalah tipe data yang dapat digunakan dalam BASCOM.
Bit (1/8 byte)
Sebuah bit hanya dapat berisi nilai 1 atau 0. Byte (1 byte)
Byte tersimpan sebagai angka biner 8-bit tidak bertanda (dari 0 - 255). Integer (dua byte)
Integer tersimpan sebagai angka biner bertanda 16-bit dengan range nilai dari -32.768 samapi +32.768.
Word (dua byte)
Word tersimpan sebagai angka biner tidak bertanda dengan range nilai dari 0 sampai 65.535.
Long (empat byte)
Long tersimpan sebagai angka biner bertanda 32bit dengan nilai -2.147.483.648 samapi +2.147.482.648.
Single
Single tersimpan sebagai angka biner bertanda 32-bit dengan range nilai dari 1,5 x 10-324 sampai 3,4 x 10308.
Double
Double tersimpan sebagai angka biner bertanda 64-bit dengan range nilai dari 5,0 x 10-324 sampai 1,7 x 10308.
String (sampai 254 byte)
String tersimpan sebagai byte yang diakhiri dengan sebuah byte 0. sebuah string dengan panjang 10 byte akan menempati 11 byte.
4. Variabel
Sebuah variabel adalah nama yang menunjuk ada sebuah objek tertentu. Nama dari sebuah variabel pada BASCOM dapat terdiri dari 32 karakter. Karakter yang diperbolehkan hanya huruf dan angka. Karakter pertama dari sebuah variabel harus sebuah huruf. Sebuah variabel tidak boleh menggunakan kata yang sudah dipakai BASCOM (Reserved Word). Yang termasuk Reserved Word adalah semua perintah, pernyataan, nama fungsi, register internal, dan nama operator.
Sebuah variabel angka hanya dapat diisi dengan nilai angka (integer, byte, long, single, atau bit). Angka heksadesimal atau biner dapat dimasukkan dengan menggunakan awalan &H atau &B. Sebelum memasukan sebuah variabel, compiler harus diberitahu dahulu dengan menggunakan perintah DIM.
Contoh :
DIM A as bit, DIM B as Integer, DIM C as Byte, DIM S as string*10, String membutuhkan parameter tambahan untuk menentukan panjang karakternya.
5. Ekspresi dan Operator
Sebuah ekspresi bisa sebuah konstanta, variabel atau sebuah nilai tunggal yang didapat dari penggabungan konstanta, variabel, dan ekspresi lainnya dengan operator. Operator melakukan operasi matematika atau logika pada nilai. BASCOM membagi ke dalam 4 kategori, yaitu : Aritmatika, Relasi, Logika, dan Fungsional.
Simulator Windows merupakan jendela simulasi yang digunakan untuk melihat peragaan perancangan program yang telah dibuat pada jendela utama. Didalam jendela simulasi ini juga terdapat simulasi dari hardware, I/O register, dan tampilan memori yang digunakan pada mikrokontroler (Flash ROM) seperti gambar di bawah ini:
.
Gambar 2.20 Simulator Windows Pada BASCOM AVR