26
BAB III METODOLOGI
3.1. Gambaran Umum
Pada karya tulis ini, penulis merancang rigging untuk tokoh robot dalam film pendek yang berjudul “Machine Hearts”. Film ini merupakan gabungan live action dan animasi dengan menambahkan tokoh robot yang tidak dapat dilakukan pada saat syuting, sehingga dibutuhkannya rig untuk menggerakkan tokoh robot.
Metode penelitian yang penulis lakukan dalam merancang rig tokoh robot yaitu metode kualitatif. Penulis mendapatkan teori-teori yang didapat dari buku dan jurnal mengenai apa saja yang dapat dilakukan dalam merancang rig serta teori bagaimana sendi robot bekerja. Penulis juga menggunakan referensi film dan teknik rigging yang dapat diterapkan pada rig robot NALA dan DARPA MED.
Penulis melakukan uji coba setelah mendapatkan referensi yang dapat diterapkan pada tokoh robot. Uji coba ini dilakukan untuk mencari tahu apakah teknik rigging dapat diterapkan pada perancangan rig tokoh NALA dan DARPA MED atau tidak. Uji coba ini diterapkan pada 4 objek penelitian, yaitu:
1. Bagaimana sistem rigging robot yang bergerak menggunakan roda.
2. Bagaimana sistem rigging robot yang memiliki bagian yang terbuka.
3. Bagaimana sistem rigging robot yang memiliki bagian dapat terpisah.
27 4. Bagaimana sistem rigging robot yang memiliki lengan bergerak sesuai jalur
yang ada pada tubuhnya.
Sinopsis
Film “Machine Hearts” bercerita tentang seorang teknisi robot, Edwin, berusaha untuk pulang dengan menerobos kabut di kota Jakarta pada tahun 2065, di mana pekerjaan manusia sudah digantikan oleh robot. Kota mengalami lockdown sehingga tak seorang pun beraktivitas di luar kecuali robot. Edwin tak menyadari mengebut di jalur yang salah karena jarak pandang yang sangat terbatas. Edwin menabrak sebuah mobil yang sedang terparkir. Kakinya tertimpa motor dan masker pelindung yang digunakan bocor. Sebuah robot perawat, NALA, menghampiri Edwin seperti berbelas-kasih, tetapi berpaling karena adanya perintah dari sistem.
Edwin berusaha bangun dan menghampiri toko obat terdekat. Robot pekerja toko obat, DARPA MED, tak bisa menolong Edwin yang tidak bisa membayar. Edwin memohon tetapi DARPA MED tetap menolak karena sistem yang sudah ditetapkan.
Malam itu terasa kota yang ramai dan terasa mati di saat yang sama.
Posisi Penulis
Film ”Machine Hearts” merupakan film tugas akhir karya gabungan kelompok mahasiswa film dengan mahasiswa animasi. Posisi penulis dalam film ini merupakan modeler dan rigger, tetapi lebih berfokus menjadi rigger untuk merancang bagaimana rig untuk tokoh robot yang tepat sesuai desain tokoh. Penulis membantu posisi desain tokoh dalam membuat tokoh 3D, kemudian menambahkan rig agar tokoh dapat digerakkan.
28 3.2. Tahapan Kerja
Ada beberapa tahapan yang penulis lakukan dalam merancang rigging pada tokoh NALA dan DARPA MED. Tahapan ini dibagi menjadi 4 sesuai kebutuhan pergerakan dari tokoh dan setiap tahapan memiliki referensinya masing-masing.
Tahapan ini penulis ringkas dengan membuat bagan serta referensi sesuai penerapan yang akan digunakan sebagai berikut:
29 Gambar 3.1. Bagan Tahapan Kerja
(Dokumentasi Pribadi)
30 3.3. Acuan dan Referensi
Dalam merancang rigging untuk robot, penulis menggunakan beberapa acuan dan referensi. Acuan yang penulis gunakan adalah acuan desain tokoh dan acuan pergerakan dalam cerita, serta referensi yang berupa film, observasi secara langsung, dan teknik rigging.
Acuan Desain Tokoh NALA
Acuan pertama yang penulis gunakan adalah desain tokoh NALA. NALA merupakan sebuah robot domestik rumah tangga dan sebagai robot yang diservis di dalam film ini. Penulis menganalisis sendi yang digunakan pada tokoh NALA.
Penulis juga menganalisis dan menanyakan kepada director gerakan apa yang diperlukan di dalam film.
Tokoh NALA bergerak menggunakan roda dengan tubuh yang mengikuti jalannya roda. NALA memiliki 4 roda dengan ukuran yang berbeda-beda kecuali roda kanan dan roda kirinya. Roda depan NALA dapat berputar untuk mengubah arah jalannya NALA.
Gambar 3.2. Desain tokoh NALA (Brasello, 2021)
31 Gambar 3.3. Roda depan NALA yang dapat berputar ke arah lain
(Dokumentasi Pribadi)
Tubuh NALA memiliki pergerakan naik-turun yang memiliki fungsi untuk memperluas jangkauan tangan NALA. Tubuh NALA menggunakan gabungan sendi tipe T (twisting) yang dapat berputar seperti tuas gas motor dan sendi tipe L (linear) yang dapat memanjang dan memendek, seperti yang dijelaskan oleh Tolouei-rad dan Dhull (2012).
Gambar 3.4. Gerak tubuh NALA (Dokumentasi Pribadi)
32 Tangan NALA memiliki lengan dengan sendi bola (ball joint). Sendi bola diterapkan pada bagian bahu, siku, pergelangan tangan, hingga sendi pada setiap jarinya. Seperti yang dikatakan oleh Thompson (2006) bahwa sendi bola dapat berputar ke segala arah, sehingga membuat pergerakan lengan NALA menjadi lebih organik. Tangan NALA juga dapat berputar-putar karena menggunakan sendi bola.
Hal ini sesuai dengan saran dari director untuk membuat tangan NALA memiliki pergerakan yang lebih luas di mana cocok untuk melakukan pekerjaan domestik yang dapat menggantikan manusia untuk melakukan pekerjaan tersebut.
Gambar 3.5. Sendi NALA (Dokumentasi Pribadi)
NALA memiliki bagian tubuh yang akan terpisah atau terbuka dalam film ini. Hal ini diperlukan karena akan ada bagian tubuh NALA yang diservis. Namun dalam film ini tidak ditampilkan bagaimana bagian tubuh itu terpisah, hanya ditampilkan bagian yang sudah terpisah. Sehingga dalam kasus ini penulis hanya perlu membuat bagian dapat dipisah dari tubuh robot untuk keperluan properti pada environment. Bagian yang dapat dipisah ini terdiri dari bagian bahu, lengan, pergelangan tangan, dan setiap jari NALA. Dan untuk bagian yang dapat terbuka adalah bagian depan tubuh NALA dekat dengan kepala.
33 Gambar 3.6. Bagian NALA yang dapat terpisah
(Dokumentasi Pribadi)
Gambar 3.7. Bagian NALA yang dapat terbuka (Dokumentasi Pribadi)
Acuan Desain Tokoh DARPA MED
Acuan kedua yang penulis gunakan adalah desain tokoh DARPA MED. DARPA MED merupakan sebuah robot pekerja toko obat. Penulis menganalisis sendi yang digunakan pada tokoh DARPA MED dan menanyakan director gerakan apa yang perlu diterapkan sehingga penulis dapat membuat rigging sesuai dengan gerakan yang diperlukan dalam film.
34 DARPA MED memiliki roda besi untuk bergerak pada jalurnya di dalam toko obat. Jalur tersebut tidak memiliki jalur yang berkelok, sehingga penulis tidak perlu membuat roda dapat berputar arah. Meskipun DARPA MED tidak memiliki jalur yang berkelok, ia memiliki tubuh yang dapat berputar untuk membuatnya dapat mengharap ke arah lain.
Gambar 3.8. Desain tokoh DARPA MED (Brasello, 2021)
Gambar 3.9. Jalur roda DARPA MED di toko obat (Angga, 2021)
35 Gambar 3.10. Tubuh DARPA MED yang dapat berputar
(Dokumentasi Pribadi)
DARPA MED memiliki bahu yang dapat mengikuti jalurnya. Jalur pada bahunya berbentuk kurva mengikuti bentuk tubuhnya. Pergerakan yang dihasilkan dari bahunya adalah naik-turun yang memiliki fungsi seperti tubuh NALA yang naik-turun, yaitu untuk memperluas jangkauan yang dapat diraih oleh DARPA MED dalam mengambil obat-obatan di toko obat.
Gambar 3.11. Gerak bahu DARPA MED (Dokumentasi Pribadi)
DARPA MED memiliki lengan dengan sendi bola dan sendi engsel. Sendi bola terdapat pada pangkal jari DARPA MED, sedangkan sendi engsel terdapat pada bagian bahu, siku, pergelangan tangan, dan setiap ruas jari DARPA MED.
Sendi engsel dapat berputar pada 1 sumbu seperti yang dikatakan oleh Thompson (2006).
36 Gambar 3.12. Sendi DARPA MED
(Dokumentasi Pribadi)
DARPA MED memiliki sendi tipe T (twisting) pada sendi perputaran bahu yang mengontrol rotasi keseluruhan tangan. Sendi ini bergerak berputar seperti pada tuas gas motor seperti yang dijelaskan oleh Tolouei-rad dan Dhull (2012).
Gambar 3.13. Gerak sendi perputaran bahu DARPA MED (Dokumentasi Pribadi)
Referensi Film “Cars”
Cars (2006) merupakan film animasi karya Pixar Animation Studio dan dirilis oleh Walt Disney Pictures. Penulis mengambil film ini sebagai referensi pergerakan roda pada tokoh.
37 Dalam film ini, setiap tokoh bergerak dengan menggunakan roda karena semua tokoh dalam film ini merupakan mobil. Roda pada tokoh berputar seiring bergeseknya dengan permukaan yang dilalui tokoh. Roda depan pada tokoh juga dapat menghadap ke arah lain untuk membuat tokoh berubah arah.
Penulis melihat referensi bagaimana roda berputar yang menyatu dengan tokoh dalam film ini. Penulis menerapkan referensi ini pada pergerakan roda tokoh NALA dan DARPA MED. Penulis juga menerapkan referensi pergerakan roda ketika tokoh berubah arah pada tokoh NALA.
Gambar 3.14. Roda dalam film “Cars”
(Cars, 2006)
Referensi Roda Kursi Kantor
Kursi kantor memiliki roda yang terdapat pada bagian bawah untuk membuatnya lebih mudah berpindah tempat. Roda pada kursi kantor menggunakan roda caster yang memiliki pergerakan berputar untuk mengubah arah pergerakan kursi.
Pergerakan roda ini penulis terapkan pada roda depan NALA untuk membuat NALA dapat bergerak ke arah lain.
38
Gambar 3.15. Roda caster pada kursi kantor (https://www.youtube.com/watch?v=nHrKdaZmuBg)
Referensi Film “Robots”
Robots (2005) merupakan film animasi tentang robot yang diproduksi oleh Blue Sky Studios dan didistribusikan oleh 20th Century Fox. Penulis melihat referensi bagaimana bagian robot dapat tepisaj pada film ini.
Film ini menceritakan tentang seorang tokoh robot yang ingin menjadi seperti idolanya dan bekerja di perusahaannya, tetapi ia mendapati bahwa pemilik perusahaan sudah berpindah tangan dan memaksa robot tua untuk membeli bagian robot baru yang mahal. Robot tua dalam film ini memiliki bagian yang dapat terpisah. Sebagian besar bagian robot yang terpisah terdapat pada bagian sendi- sendinya.
Penulis menerapkan referensi bagaimana bagian robot dapat terpisah pada tokoh NALA. Bagian yang terpisah pada NALA adalah bagian tangan, sehingga penulis dapat membuat perpisahan terletak pada setiap sendi tangan NALA.
39 Gambar 3.16. Bagian robot terpisah
(Robots, 2005)
Referensi Film “Wall-E”
“Wall-E” (2008) merupakan film animasi yang diproduksi oleh Pixar Animation Studios dan dirilis oleh Walt Disney Pictures. Penulis mengambil tokoh Wall-E sebagai referensi penulis dalam melihat gerakan bahu dan bagian yang terbuka.
Wall-E memiliki tangan untuk mengeruk sampah dan memasukkan ke dalam tubuhnya. Hal ini terjadi karena adanya jalur bahu yang terdapat pada tubuhnya, sehingga tangannya dapat mencapai tanah dengan jarak yang jauh dengan bahu yang berada di bagian bawah, dan membuat sampah masuk ke dalam tubuhnya dengan pergerakan bahu yang mundur. Pergerakan bahu ini dapat penulis terapkan pada pergerakan bahu tokoh DARPA MED.
Gambar 3.17. Pergerakan bahu Wall-E (Wall-E, 2008)
40 Penulis juga mengambil referensi bagaimana tubuh Wall-E dapat terbuka ketika akan memasukkan sampah ke dalam tubuhnya. Pergerakan bagian yang dapat terbuka ini penulis terapkan pada tubuh NALA yang memiliki motherboard di dalam tubuhnya.
Gambar 3.18. Pergerakan tubuh Wall-E yang terbuka (Wall-E, 2008)
Referensi Rig Lego Tokoh Wall-E
Referensi rig lego tokoh Wall-E juga menjadi referensi penulis selain dalam filmnya. Rig ini penulis dapatkan dari website Gumroad secara gratis. Dalam rig ini, penulis melihat rig seperti apa yang diterapkan pada bahu Wall-E. Penulis juga melihat bagaimana bagian depan tubuh Wall-E terbuka.
Penulis menganalisis bagaimana bahu Wall-E dapat mengikuti jalurnya pada rig ini. Penulis mendapati bahwa bahu Wall-E bergerak pada satu sumbu.
Controller bahu dibuat memiliki nilai minimum dan nilai maksimum pada sumbu yang bergerak, sehingga bahu tidak akan melebihi dari jalurnya.
41 Gambar 3.19. Visualisasi bahu pada rig Wall-E
(Dokumentasi Pribadi)
Gambar 3.20. Penggunaan gerakan 1 sumbu (Dokumentasi Pribadi)
Gambar 3.21. Atribut gerakan yang dibatasi (Dokumentasi Pribadi)
Penulis juga mendapati dalam membuat bagian terbuka yang berada pada tubuh Wall-E dapat menggunakan controller yang dipindahkan pivot point-nya ke pusat perputaran sendi bagian terbuka. Atribut rotasi juga hanya dapat digerakkan pada axis X sehingga bagian dapat terbuka.
42 Gambar 3.22. Controller bagian terbuka
(Dokumentasi Pribadi)
Gambar 3.23. Atribut rotate X pada controller pembuka (Dokumentasi Pribadi)
Referensi Teknik Pembuatan Rigging Roda
Penulis menggunakan 2 referensi tutorial dalam pembuatan rig roda. Referensi tersebut meliputi tutorial yang dibuat oleh Delano Athias di platform Pluralsight.com. Tutorial ini berjudul Transforming Robot Production Pipeline Volume 6 Rigging. Referensi lainnya adalah tutorial yang dibuat oleh channel Jawwad bin Javed di platform youtube dengan judul How to rig automated wheel in maya.
Teknik rigging yang dibuat oleh Delano Athias menjelaskan pembuatan rig roda menggunakan joint sebagai penggerak posisi. Ia juga menggunakan expression untuk membuat roda berputar secara otomatis sesuai dengan jarak yang ditempuh roda.
43 Gambar 3.24. Penggunaan joint pada roda
(https://www.pluralsight.com/courses/transforming-robot-production-pipeline-6-rigging-674)
Dalam pembuatan expression, ia menjelaskan bahwa perlu mendapatkan keliling roda dengan rumus seperti yang dijelaskan oleh Zegarelli (2014). Delano Athias mendapatkan jari-jari dari roda dengan menggunakan distance tool dan mengetiknya dalam expression. Kemudian ia membuat expression pada baris ke-3 yang mengatur rotasi dari roda dengan jarak tempuh roda dibagi dengan keliling lingkaran lalu dikali dengan 360 yang merupakan sudut roda berputar dalam sekali putaran.
Gambar 3.25. Expression yang digunakan oleh Delano Athias
(https://www.pluralsight.com/courses/transforming-robot-production-pipeline-6-rigging-674)
Teknik lain yang penulis jadikan referensi adalah teknik rigging yang dibuat oleh channel Jawwad bin Javed. Ia menjelaskan pembuatan rig roda menggunakan locator sebagai penggerak posisi. Ia juga membuat distance tool untuk mengukur ukuran roda. Kemudian ia membuat expression untuk memutar roda secara otomatis dengan mengambil atribut dari distance tool ukuran roda agar berputar sesuai dengan besar roda.
44 Gambar 3.26. Penggunaan locator pada roda
(https://www.youtube.com/watch?v=g7tKFj3kcOY&ab_channel=Jawwadbinjaved )
Gambar 3.27. Penggunaan distance tool untuk mendapat diameter (https://www.youtube.com/watch?v=g7tKFj3kcOY&ab_channel=Jawwadbinjaved )
Gambar 3.28. Expression pembuatan roda oleh Jawwad bin Javed (https://www.youtube.com/watch?v=g7tKFj3kcOY&ab_channel=Jawwadbinjaved )
Penulis melakukan analisa pada expression yang digunakan oleh Jawwad bin Javed karena ia tidak menjelaskan penggunaan expression tersebut. Ia menggunakan expression yang mirip dengan expression Delano Athias, tetapi ia menggunakan diameter yang didapat dari distance yang telah dibuat pada roda untuk mencari keliling lingkaran.
45 Referensi Teknik Pembuatan Kontrol Properti Multi-connection
Teknik ini merupakan teknik dalam animasi untuk membuat properti yang digunakan tokoh dapat dipisah atau dipegang oleh tokoh. Tutorial ini penulis dapatkan dari platform youtube.com yang dibuat oleh Sir Wade Neistadt dengan judul How to Make Characters Grab Objects - Parenting Constraints. Dalam video ini, ia menjelaskan bagaimana pembuatan animasi tokoh yang melempar benda, tetapi ia memvisualisasikannya dengan bentuk papan yang melontarkan bola.
Teknik yang ia gunakan adalah melakukan parent constraint pada bola yang akan dilempar ke beberapa locator sesuai dengan posisi yang akan dicapai seperti pada gambar 3.29 di mana ada 3 locator yang diposisikan pada gerakan bola yang ingin dicapai. Ia mengubah atribut dalam setting parent constraint untuk memilih pada locator mana bola akan selalu mengikuti seperti pada gambar 3.30.
Gambar 3.29. Penempatan locator pada posisi yang dicapai bola
(https://www.youtube.com/watch?v=U8JXO39aAqY&ab_channel=SirWadeNeistadt )
46 Gambar 3.30. Setting parent constraint pada bola
(https://www.youtube.com/watch?v=U8JXO39aAqY&ab_channel=SirWadeNeistadt )
Teknik ini menghasilkan pergerakan bola yang dapat berpindah-pindah dan mengikuti objek tertentu.
Gambar 3.31. Hasil gerakan kontrol properti
(https://www.youtube.com/watch?v=U8JXO39aAqY&ab_channel=SirWadeNeistadt )
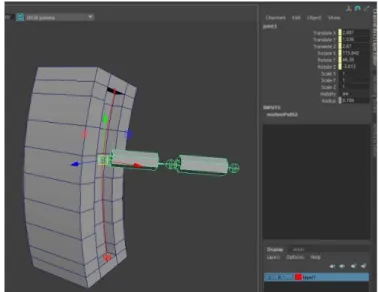
Referensi Teknik Animasi Menggunakan Motion Path
Penulis mengambil referensi teknik animasi yang dibuat oleh channel youtube yang bernama Uhr dengan judul Maya: The Motion Path and its U Value. Dalam video ini, ia menjelaskan bahwa penggunaan motion path dapat dikontrol dengan mengubah atribut U value pada motion path.
47 Gambar 3.32. Penggunaan U value pada motion path
(https://www.youtube.com/watch?v=ME6AN2c6C_s&ab_channel=Uhr)
3.4. Proses Perancangan
Penulis melakukan eksperimen putaran roda serta 4 uji coba perancangan dalam membuat rig robot sesuai dengan batasan masalah penulis setelah melihat referensi- referensi. Perancangan ini meliputi rigging roda, rigging dengan bagian yang dapat terbuka mengikuti tubuh robot, rigging dengan bagian yang dapat terpisah, serta rigging robot yang memiliki bahu dapat mengikuti jalurnya. Penulis kemudian melakukan analisa apakah uji coba dapat diterapkan pada tokoh atau tidak.
Eksperimen Putaran Roda
Penulis juga melakukan eksperimen dengan membuat 2 buah lingkaran yang berbeda ukuran, lingkaran pertama memiliki jari-jari 3 cm sedangkan lingkaran kedua 4,75 cm. Penulis menandai garis pada lingkaran dan menempatkannya di bawah menyentuh lantai. Kemudian penulis memutarkan keduanya sebanyak 1 putaran. Hasil dari eksperimen ini adalah lingkaran yang memiliki ukuran lebih besar dapat menempuh jarak yang lebih jauh dalam 1 putaran dibandingkan dengan lingkaran yang lebih kecil. Hal ini berhubungan dengan keliling lingkaran yang
48 dijelaskan oleh Zegarelli (2014), di mana keliling merupakan panjang garis yang membentuk sebuah bangun datar. Jika keliling lingkaran yang didapat semakin besar, maka semakin jauh jarak yang dapat ditempuh oleh lingkaran jika diputar.
Gambar 3.33. Eksperimen putaran roda (Dokumentasi Pribadi)
Uji Coba Rigging Roda
Penulis menguji coba teknik pembuatan rig roda yang digunakan oleh Jawwad bin Javed yang menggunakan locator dan Delano Athias yang menggunakan joint.
Penulis juga menggunakan referensi roda pada film “Cars” (2006).
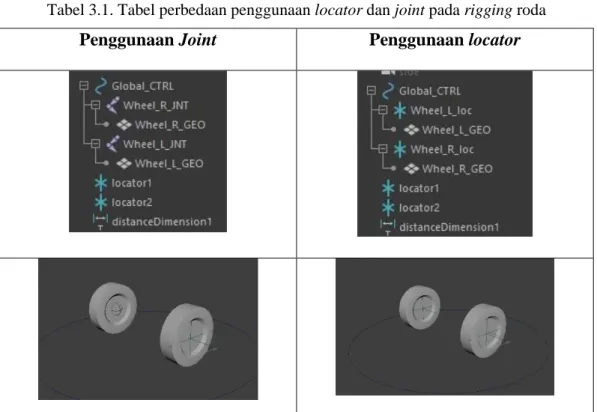
Tabel 3.1. Tabel perbedaan penggunaan locator dan joint pada rigging roda Penggunaan Joint Penggunaan locator
49 Kedua teknik ini menghasilkan gerakan yang sama dengan hierarki outliner yang sama, sehingga penulis dapat memilih salah satu dari kedua teknik tersebut.
Tetapi perbedaannya terdapat pada penggunaan expression. Expression yang digunakan oleh Jawwad bin Javed mengambil distance dari distance tool yang sudah dibuat, sedangkan yang dibuat oleh Delano Athias hanya melihat angka dari distance tool dan memasukkannya ke dalam expression.
Penulis menggunakan expression yang digunakan oleh Delano Athias. Ia menjelaskan fungsi dari expression yang digunakan secara detail, sehingga lebih mudah dipahami. Penulis juga melihat ada bagian yang penulis dapat terapkan pada tokoh dari expression yang digunakan oleh Jawwad bin Javed, yaitu expression di mana ia mengambil distance untuk mengukur jari-jari roda. Hal ini penulis lakukan karena ketika tokoh di-scale, jari-jari roda akan lebih besar sehingga roda akan berputar dengan seharusnya sesuai dengan eksperimen penulis dalam membuat lingkaran yang berbeda ukuran. Kemudian penulis menggabungkan expression Delano Athias dengan expression Jawad bin Javed yang menghasilkan expression seperti pada gambar 3.34.
Gambar 3.34. Expression gabungan Delano Athias dan Jawad bin Javed (Dokumentasi Pribadi)
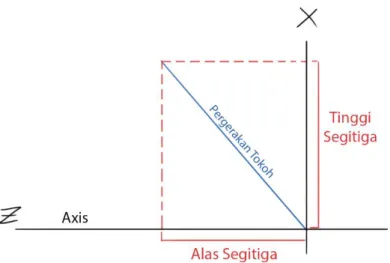
50 Penggunaan expression ini membuat roda berputar, tetapi ketika roda menghadap ke arah lain, roda tidak berputar dengan semestinya. Penulis melakukan modifikasi sesuai dengan keperluan penulis dalam membuat roda yang dapat bergerak ke arah lain. Penulis melakukan visualisasi pergerakan ketika dilihat dari tampak atas pada gambar 3.35. Ketika tokoh bergerak di antara axis X dan Z, pergerakan akan selalu membentuk segitiga siku-siku dengan axis X merupakan tinggi segitiga dan axis Z merupakan alas segitiga. Penulis mencari sisi terpanjang dengan menggunakan rumus pythagoras seperti yang dikatakan oleh Zegarelli (2014). Penggunaan rumus ini penulis terapkan pada expression seperti pada gambar 3.36.
Gambar 3.35. Visualisasi pergerakan tokoh (Dokumentasi Pribadi)
51 Gambar 3.36. Penerapan rumus pythagoras pada expression
(Dokumentasi Pribadi)
Roda berhasil berputar sesuai dengan jari-jarinya pada saat menghadap ke arah lain. Tetapi ketika posisi controller berada di bawah 0, roda berputar berlawanan arah dari jalannya controller.
Penulis mencoba mencari tahu dengan melakukan wawancara terbuka pada grup Facebook “Maya Rigging & Animation” dengan menanyakan masalah yang penulis hadapi. Seorang pengguna dengan nama Gary Spiers memberikan solusi dengan menggunakan if dan else. Ketika posisi translate berada di bawah 0, penghitungan rotasi roda dikali dengan -1, sedangkan ketika posisi translate berada di atas 0, penghitungan rotasi tidak diubah. Dengan ini penulis memodifikasi kembali expression seperti pada gambar 3.37 dan penulis berhasil membuat rig putaran roda.
52 Gambar 3.37. Hasil akhir expression roda
(Dokumentasi Pribadi)
Uji Coba Rigging Bagian Robot Terbuka
Dalam membuat rig ini, penulis menggunakan referensi pada film “Wall-E” (2008) bagaimana bagian tubuh Wall-E terbuka untuk mengambil sampah dan rig lego tokoh Wall-E dalam membuat bagian terbuka tersebut.
Uji coba ini penulis lakukan dengan pembuatan objek dengan beberapa face yang penulis extract untuk bagian yang dapat terbuka. Penulis juga membuat rangkaian joint untuk melihat apakah bagian terbuka akan selalu mengikuti joint atau tidak. Bagian robot di-parent ke joint pusat. Kemudian penulis membuat controller pada pusat perputaran bagian yang terbuka dan melakukan parent objek pembuka ke controller tersebut. Penulis juga melakukan parent controller ke joint pusat, sehingga controller akan selalu mengikuti gerakan joint pusat. Dengan menggerakkan rotasi dari controller, maka objek pembuka akan terbuka seperti pada gambar 3.38.
53 Gambar 3.38. Teknik rigging bagian terbuka
(Dokumentasi Pribadi)
Uji Coba Rigging Bagian Robot Terpisah
Penulis menggunakan referensi teknik pembuatan kontrol properti yang dibuat oleh Sir Wade Neistadt. Penulis juga menggunakan acuan keperluan pergerakan robot dalam film yang tidak ditampilkan bagaimana proses perpisahan bagian robot dan referensi film “Robots” (2005) sebagai referensi bagian mana yang dapat terpisah.
Penulis mencoba dengan menggunakan 3 locator. Locator ini terbagi menjadi locator objek, locator pisah, dan locator menyatu ke tubuh. Penulis juga membuat masing-masing controller pada locator menyatu ke tubuh dan locator pisah. Kemudian penulis menggunakan parent constraint pada locator objek ke locator pisah dan locator menyatu dengan tubuh. Dengan ini, ada setting yang dapat penulis ubah locator mana yang akan digunakan pada locator objek.
54 Gambar 3.39. Outliner uji coba rig bagian robot terpisah
(Dokumentasi Pribadi)
Gambar 3.40. Setting parent constraint (Dokumentasi Pribadi)
Setting parent constraint ini dapat dikontrol menggunakan sebuah controller. Tools yang penulis gunakan adalah set driven key untuk membuat sebuah atribut controller dapat mengubah setting parent constraint, seperti yang dijelaskan oleh O’Hailey (2018) mengenai set driven key. Dengan ini, penulis menjadi lebih mudah ketika ingin mengubah dari bagian yang menyatu menjadi terpisah.
55 Gambar 3.41. Hasil ketika menyatu
(Dokumentasi Pribadi)
Gambar 3.42. Hasil ketika terpisah (Dokumentasi Pribadi)
Uji Coba Rigging Bahu Robot Yang Mengikuti Jalurnya
Penulis menggunakan referensi rig lego tokoh Wall-E serta teknik dari channel Uhr dalam membuat rig bahu robot yang mengikuti jalurnya. Tokoh Wall-E juga menjadi referensi penulis di mana bahunya dapat bergerak mengikuti jalur pada tubuh Wall-E.
Uji coba ini penulis lakukan dengan menggunakan hal yang sama pada bagian bahu rig Wall-E. Penulis juga membuat joint serta membuat controller
56 untuk menggerakkan joint tersebut dengan parent joint ke controller. Penulis membuat nilai minimum serta maksimal pada atribut translate Y controller.
Pergerakan joint dapat naik-turun, tetapi tidak mengikuti jalur bahunya.
Gambar 3.43. Penggunaan batas nilai minimum dan maksimum translate Y (Dokumentasi Pribadi)
Penulis kemudian mencoba untuk melakukan set driven key untuk membuat controller dapat maju ketika berada di tengah jalur. Penulis berhasil menggunakan cara ini Tetapi ketika controller berada di tengah posisi saat tidak dilakukan set driven key, pergerakan yang dihasilkan tidak membentuk kurva seperti pada jalurnya.
Gambar 3.44. Penggunaan set driven key untuk mengikuti jalur (Dokumentasi Pribadi)
57 Penulis juga menggunakan teknik channel Uhr dengan membuat objek dan kurva yang mengikuti bentuk objek terlebih dahulu. Kemudian penulis membuat pergerakan joint mengikuti kurva menggunakan motion path. Pergerakan joint berhasil mengikuti kurva, tetapi perputaran joint tidak dapat dikontrol serta pergerakan tidak bisa dikontrol karena pergerakan motion path bergantung pada time slider.
Gambar 3.45. Penggunaan motion path untuk mengikuti jalur (Dokumentasi Pribadi)
Langkah selanjutnya yang penulis lakukan adalah membuat locator.
Locator ini digunakan untuk mengikuti pergerakan kurva seperti yang penulis lakukan sebelumnya pada joint. Locator berhasil mengikuti pergerakan kurva, tetapi joint tidak bergerak mengikuti. Kemudian penulis menggunakan point constraint pada joint agar mengikuti pergerakan locator. Penulis dapat memutar joint dan pergerakan mengikuti kurva, tetapi pergerakan masih belum dapat dikontrol karena pergerakan motion path masih bergantung pada time slider.
58 Gambar 3.46. Penggunaan motion path dengan joint dapat dikontrol
(Dokumentasi Pribadi)
Berdasarkan teknik dari channel Uhr, ia menggunakan U value pada motion path. Penulis dapat mengatur pergerakan motion path dengan menghapus keyframe pada U value. Penulis menggunakan set driven key pada U value agar U value dapat diatur menggunakan controller.
Gambar 3.47. U value pada motion path yang memiliki keyframe (Dokumentasi Pribadi)
59 Gambar 3.48. Hasil setelah dapat mengatur U value
(Dokumentasi Pribadi)
Perancangan Rigging NALA
Dalam perancangan rigging NALA, penulis menggunakan uji coba pembuatan rig roda, uji coba pembuatan rig bagian robot terbuka, serta uji coba pembuatan rig bagian robot terpisah.
Pembuatan rig penulis mulai dengan membuat rig roda. Dalam pembuatan rig roda, penulis membuat locator terlebih dahulu yang diletakkan di tengah setiap roda. Setelah membuat locator, penulis melakukan parent constraint dan scale constraint objek roda pada locator-nya masing-masing seperti pada gambar 3.49.
Parent constraint dilakukan untuk membuat objek selalu mengikuti gerakan dari controller sedangkan scale constraint digunakan untuk membuat objek dapat membesar mengikuti scale controller seperti yang dijelaskan oleh Beane (2012).
Penulis juga akan melakukan scale constraint pada seluruh objek ke controller atau locator masing-masing untuk membuat seluruh objek dapat membesar bersamaan ketika controller global di-scale.
60 Gambar 3.49. Pembuatan locator pada setiap roda NALA
(Dokumentasi Pribadi)
Penulis juga membuat controller untuk menggerakkan lajunya robot yang penulis namakan dengan “Movement_CTRL”, serta global controller untuk membuat tokoh dapat dipindahkan dan dibesarkan atau dikecilkan secara keseluruhan tokoh. “Movement_CTRL” atau controller penggerak penulis parent ke global controller. Selanjutnya penulis melakukan parent semua locator roda ke controller penggerak, sehingga roda akan bergerak seiring controller digerakkan.
Penulis juga melakukan parent constraint dan scale constraint objek tubuh NALA bagian bawah ke controller penggerak agar objek mengikuti gerak controller.
Penulis menggunakan measure tools yang bernama distance tool untuk mendapatkan jari-jari pada setiap roda. Distance tool ini penulis namai dengan
“wheel_back_distance”. Hasil dari distance tool dapat terlihat pada gambar 3.50 yang menunjukkan jari-jari roda. Tools ini juga digunakan untuk roda lainnya karena NALA memiliki roda yang ukurannya berbeda, seperti eksperimen penulis dalam melihat putaran roda di mana roda yang memiliki jari-jari lebih besar akan menempuh jarak yang lebih jauh dalam sekali putaran.
61 Gambar 3.50. Penggunaan distance tool untuk mendapatkan jari-jari
(Dokumentasi Pribadi)
Penulis perlu membuat expression pada rotate X locator roda untuk membuat roda berputar seiring pergerakan controller penggerak pada translate Z.
Penulis melakukan hal yang sama pada setiap locator roda dan mengubah expression sesuai dengan penamaan locator dan distance tool roda tersebut. Berikut adalah expression yang penulis gunakan:
Gambar 3.51. Expression yang diterapkan pada roda NALA (Dokumentasi Pribadi)
62 NALA memiliki roda depan yang dapat berputar ke arah lain untuk membuatnya dapat berbelok. Penulis menggunakan referensi pergerakan roda yang digunakan kursi kantor. Untuk mencapai pergerakan seperti roda tersebut, penulis membuat grup yang berisi locator roda tersebut. Kemudian penulis membuat controller yang dapat mengontrol rotasi grup tersebut dengan aim constraint, sehingga roda akan mengikuti arah di mana controller berada.
Gambar 3.52. Putaran roda untuk berbelok yang dikontrol controller (Dokumentasi Pribadi)
Gambar 3.53. Hierarki grup roda yang berbelok (Dokumentasi Pribadi)
Penulis juga melakukan clean up pada controller penggerak. Penulis mengunci atribut translate Y serta rotate X dan Z karena NALA tidak memiliki gerakan ke atas. Atribut scale X, Y dan Z serta visibility juga dikunci karena untuk penggunaan atribut scale hanya akan dapat bekerja pada controller global untuk membuat keseluruhan objek tokoh membesar. Proses clean up dilakukan agar animator tidak bingung saat ingin melakukan animasi seperti yang dikatakan oleh O’Hailey (2018).
63 Gambar 3.54. Hasil clean up controller penggerak NALA
(Dokumentasi Pribadi)
Pembuatan rig penulis lanjutkan dengan membuat controller untuk tubuh NALA. Kemudian penulis melakukan parent constraint dan constraint scale dari objek tubuh NALA bagian atas ke controller tubuh. Controller tubuh juga penulis lakukan parent ke controller penggerak untuk membuatnya mengikuti gerak controller penggerak.
Gambar 3.55. Pembuatan controller tubuh NALA (Dokumentasi Pribadi)
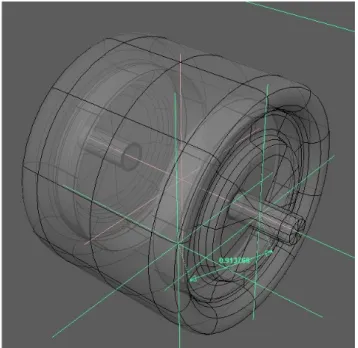
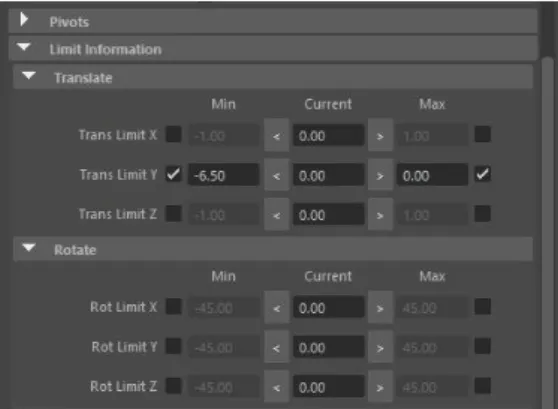
Tokoh NALA memiliki tubuh yang dapat naik dan turun. Penulis mengambil referensi rig Wall-E pada bagian bahunya yang memiliki nilai maksimum dan minimum pada controller bahunya, sehingga memiliki pergerakan dengan batas naik dan batas turun. Hal ini penulis terapkan pada controller tubuh NALA dengan membuat batas pada translate Y. Penulis mendapatkan angka -6.50 dengan mencoba menurunkan sampai angka berapakah tubuh NALA akan menyentuh bagian tubuhnya.
64 Gambar 3.56. Pembatasan nilai minimum dan maksimum controller tubuh NALA
(Dokumentasi Pribadi)
Penulis melakukan clean up pada controller tubuh. Karena controller tubuh hanya dapat bergerak naik turun dan berputar seperti sendi tipe T (twisting) yang dijelaskan oleh Tolouei-rad & Dhull (2012), maka penulis mengunci atribut translate X dan translate Z serta rotate X dan rotate Z. Penulis juga mengunci seluruh atribut scale dan visibility.
Gambar 3.57. Hasil clean up controller tubuh NALA (Dokumentasi Pribadi)
Selanjutnya, penulis membuat rig untuk bagian yang dapat terbuka. Penulis membuat rig ini menggunakan referensi tokoh Wall-E serta rig lego tokoh Wall-E yang memiliki bagian tubuh yang dapat terbuka lalu menerapkan uji coba rigging bagian terbuka pada tokoh NALA.
Penulis membuat controller dengan memindahkan pivot point pada pusat putaran objek bagian yang dapat terbuka. Hal ini membuat putaran objek tersebut dapat bergerak sesuai pusat terbukanya seperti yang penulis lakukan pada uji coba
65 pembuatan rig bagian terbuka dan yang dijelaskan oleh Beane (2012) mengenai pivot point. Kemudian penulis melakukan parent constraint dan scale constraint objek bagian tersebut ke controller, sehingga objek dapat bergerak ketika controller digerakkan. Penulis juga melakukan clean up pada controller pembuka dengan lock seluruh atribut kecuali rotate X karena objek hanya dapat berputar pada axis tersebut, serta melakukan pembatasan nilai rotate X dengan nilai maksimum 0 sehingga animator hanya dapat membuatnya terbuka keluar.
Gambar 3.58. Pembuatan rig bagian yang dapat terbuka pada NALA (Dokumentasi Pribadi)
Penulis membuat rig pada tangan NALA setelah membuat rig tubuh NALA dan bagian yang dapat terbuka pada tubuhnya. Pembuatan rig tangan yang dapat dipisah berdasarkan uji coba penulis dalam membuat rig bagian terpisah seperti yang dikatakan oleh Sir Wade Neistadt dalam membuat animasi tokoh menggunakan properti. Pembuatan rig ini juga mengambil referensi bagian robot yang dapat terpisah dari film “Robots” (2005).
66 Rig tangan dimulai dengan membuat locator untuk setiap sendi tangan dan men-duplicate-nya menjadi 3. Duplikat pertama untuk bagian terpisah yang penulis namakan dengan tambahan “Part” di setiap bagian; duplikat kedua untuk bagian menyatu yang penulis namakan dengan tambahan “Attached”; dan duplikat yang terakhir untuk objeknya yang tidak penulis beri penambahan nama seperti pada gambar 3.60.
Gambar 3.59. Pembuatan locator pada setiap pusat putaran sendi tangan NALA (Dokumentasi Pribadi)
Gambar 3.60. Hasil duplicate locator (Dokumentasi Pribadi)
67 Setiap locator objek penulis lakukan parent constraint ke locator attached dan part untuk membuat perpindahan locator dapat mengikuti kedua locator tersebut dengan constraint seluruh axis pada translate dan rotate. Hal ini untuk membuat locator objek selalu mengikuti pergerakan dan rotasi dari locator attached dan part.
Gambar 3.61. Pengaturan parent constraint (Dokumentasi Pribadi)
Penulis membuat grup pada setiap locator untuk memisahkan locator di outliner seperti pada gambar 3.62. Penulis juga melakukan parenting pada locator attached agar setiap locator yang menjadi child akan mengikuti parent seperti yang dijelaskan oleh Beane (2012). Sedangkan untuk part tidak dilakukan parenting karena akan dibuat terpisah-pisah.
68 Gambar 3.62. Hierarki locator attached dan part
(Dokumentasi Pribadi)
Penulis selanjutnya melakukan parent constraint dan scale constraint objek tangan ke locator-nya, seperti objek bahu ke locator bahu, jari ke locator jari, dan seterusnya.
Penulis mencoba menggerakkan locator attached dan menghasilkan locator objek berada di tengah antara locator attached dan part seperti pada gambar 3.63.
Hal ini terjadi karena locator ini di-parent constraint ke locator attached dan part sehingga ia mengikuti setengah dari locator part dan setengah dari locator attached.
Gambar 3.63. Gerakan berada di antara locator attached dan part (Dokumentasi Pribadi)
69 Penulis menambah atribut setting pada controller global untuk membuat locator objek tangan dapat mengikuti salah satu dari locator berdasarkan pengaturan yang dipilih animator. Penulis memilih tipe data integer pada pembuatan atribut baru agar animator tidak dapat memasukkan angka desimal.
Penulis juga membuat nilai minimum 0 dan nilai maksimal 1. Posisi 0 untuk membuat locator objek mengikuti locator attached dan 1 untuk membuat locator objek mengikuti locator parts.
Gambar 3.64. Penambahan atribut attached/parts (Dokumentasi Pribadi)
Setelah pembuatan atribut pada controller global selesai, penulis melakukan set driven key dengan atribut attached/parts menjadi driver dan setiap setting parent constraint pada locator objek menjadi driven.
Penulis membuat atribut part pada setiap setting parent constraint menjadi 0 dan attached 1 ketika posisi atribut attached/parts berada pada posisi 0. Penulis juga melakukan hal yang sama untuk parts dengan membuat atribut parts menjadi 1 dan attached menjadi 0 ketika atribut attached/parts berada pada posisi 1.
70 Ketika atribut attached/parts pada controller setting berada diposisi 0, maka locator objek akan mengikuti locator attached, sedangkan ketika atribut attached/parts berada di posisi 1, maka locator objek akan mengikuti locator part.
Gambar 3.65. Locator objek mengikuti locator attached (Dokumentasi Pribadi)
Gambar 3.66. Locator objek mengikuti locator part (Dokumentasi Pribadi)
Pembuatan controller pada masing-masing locator attached dan locator parts merupakan hal yang penulis lakukan selanjutnya. Setelah membuat controller, penulis melakukan parent constraint setiap locator ke controller masing-masing.
71 Dengan ini, rig untuk tangan sudah selesai dan langkah selanjutnya adalah clean up. Penulis membuat grup dengan nama “L_Arm_GRP” yang berisi seluruh grup locator dan locator objek. Lock atribut pada controller yang tidak akan digerakkan animator, seperti pada controller bahu yang attached hanya dapat melakukan rotasi sedangkan controller bahu yang parts dapat melakukan perpindahan dan rotasi. Penulis juga melakukan set driven key kepada grup locator attached dan grup locator parts pada atribut visibility, sehingga ketika atribut attached/parts pada controller global berada pada posisi 0, grup parts akan tidak terlihat dan ketika berada pada posisi 1, grup attached akan tidak terlihat.
Gambar 3.67. Controller attached ketika atribut attached/part berada di posisi 0 (Dokumentasi Pribadi)
Gambar 3.68. Controller part ketika atribut attached/part berada di posisi 1 (Dokumentasi Pribadi)
72 Penulis melakukan hal yang sama pada pembuatan keseluruhan rig tangan kanan NALA seperti yang penulis lakukan dalam pembuatan tangan kiri NALA.
Dengan ini, perancangan rig untuk NALA sudah selesai dan siap untuk dianimasikan.
Perancangan Rigging DARPA MED
Penulis menerapkan uji coba rigging roda serta rigging bahu robot yang mengikuti jalurnya dalam merancang rigging DARPA MED.
Pembuatan rig penulis mulai dengan rigging roda pada DARPA MED.
Rigging ini sama seperti yang penulis lakukan pada tokoh NALA dengan menggunakan expression, tetapi adanya perbedaan. Expression berbeda pada putaran roda yang berputar pada axis Z dan arah gerak yang berada pada translate X. Penggunaan if dan else juga berbeda karena putaran roda DARPA MED berlawanan dengan arah maju DARPA MED, sehingga adanya perubahan penempatan perkalian -1 yang menjadi ketika posisi translate X controller penggerak berada di atas 0.
Gambar 3.69. Expression roda DARPA MED (Dokumentasi Pribadi)
73 Dengan menggunakan expression ini, roda dapat bergerak sesuai arahnya seperti pada gambar 3.70. Penggunaan expression ini diterapkan pada setiap roda pada DARPA MED.
Gambar 3.70. Hasil ketika controller penggerak digerakkan (Dokumentasi Pribadi)
Penulis juga melakukan clean up pada controller penggerak dengan mengunci atribut translate Y serta rotate X dan Z karena roda DARPA MED tidak memiliki pergerakan yang menggunakan atribut tersebut. Penulis juga mengunci seluruh atribut scale dan visibility.
Gambar 3.71. Hasil clean up controller penggerak (Dokumentasi Pribadi)
Penulis membuat controller tubuh setelah membuat rig roda. Controller tubuh kemudian di-parent ke controller penggerak sehingga controller tubuh akan selalu mengikuti pergerakan controller penggerak. Penulis melakukan parent constraint dan scale constraint objek tubuh bagian atas untuk membuatnya mengikuti controller tubuh.
74 Gambar 3.72. Pembuatan controller tubuh DARPA MED
(Dokumentasi Pribadi)
Tahap selanjutnya adalah clean up controller tubuh. Karena tubuh DARPA MED hanya dapat melakukan rotasi pada axis Y, penulis mengunci seluruh atribut kecuali rotate Y.
Gambar 3.73. Hasil clean up controller tubuh DARPA MED (Dokumentasi Pribadi)
Pembuatan rig penulis lanjut dengan membuat rig tangan. Penulis memulai dengan telapak tangan DARPA MED. Pembuatan telapak tangan menggunakan joint pada setiap pusat putaran sendi pada telapak tangan. Penulis menduplikat joint dan menambahkan nama dengan orient. Joint orient ini penulis gabungkan dengan joint sebelumnya sehingga membentuk hierarki seperti pada gambar 3.74.
Penambahan joint orient digunakan untuk melakukan set driven key untuk controller tambahan nantinya dan animator masih dapat mengatur rotasi dari joint
75 objek. Penulis membuat controller pada setiap joint objek dan mengunci atribut seluruh atribut kecuali atribut rotate. Penulis juga membuat controller untuk melakukan set driven key yang memiliki atribut grip. Set driven key dilakukan dengan membuat controller grip menjadi driver dan joint orient sebagai driven.
Dengan membuat ini, animator juga dapat bekerja lebih cepat ketika menggerakkan jari DARPA MED yang menghasilkan gerakan seperti pada gambar 3.75.
Gambar 3.74. Hierarki joint pada telapak tangan DARPA MED (Dokumentasi Pribadi)
Gambar 3.75. Controller grip (Dokumentasi Pribadi)
76 Penulis membuat rig lengan DARPA MED setelah membuat rig telapak tangan. Pembuatan rig lengan dengan menggunakan joint dan diduplikat menjadi 3. Duplikat pertama untuk objek yang penulis namakan dengan result, duplikat kedua untuk penggunaan FK dan duplikat ketiga untuk penggunaan IK. Pada seluruh joint bahu, penulis mengunci rotate Z karena bahu DARPA MED tidak dapat berputar pada axis tersebut. Penulis juga melakukan parent constraint rig telapak tangan yang telah dibuat ke joint result tangan. Penulis menggunakan node editor dengan node blend colors untuk menggabungkan FK dan IK pada result joint dan menghasilkan hierarki seperti pada gambar 3.76. Penulis juga membuat controller untuk mengatur node blend colors akan berpengaruh FK atau IK.
Gambar 3.76. Node editor lengan DARPA MED (Dokumentasi Pribadi)
Pada joint IK, penulis menggunakan IK handle tool dan membuat controller untuk dilakukan point constraint dari IK handle ke controller tersebut. Penulis juga mengunci atribut translate Y karena pergerakan lengan DARPA MED tidak dapat bergerak ke arah atas atau bawah karena pergerakan tersebut diatur pada bagian bahu DARPA MED yang naik-turun. Pada pembuatan FK, penulis membuat controller untuk setiap joint dan mengunci seluruh atribut kecuali rotate.
77 Gambar 3.77. Controller IK
(Dokumentasi Pribadi)
Gambar 3.78. Controller FK (Dokumentasi Pribadi)
Penulis menggunakan connection editor untuk menghubungkan rotasi controller IK dan FK ke joint telapak tangan. Penulis juga menggunakan node blend colors pada joint telapak tangan. Hal ini penulis lakukan untuk mengatur atribut rotasi joint telapak tangan akan terkoneksi pada controller FK atau IK.
78 Gambar 3.79. Node editor telapak tangan
(Dokumentasi Pribadi)
Dari keseluruhan joint, penulis membuat grup dan memindahkan pivot point grup tersebut ke pusat putaran bahu. Penulis juga membuat controller untuk mengontrol rotasi grup tersebut. Hal ini penulis lakukan karena putaran bahu DARPA MED memiliki sendi tipe T (twisting), sehingga memerlukan controller yang dapat mengatur rotasi dari sendi tersebut.
Gambar 3.80. Pembuatan controller sendi perputaran bahu (Dokumentasi Pribadi)
79 Rig yang penulis buat selanjutnya adalah pembuatan bahu yang mengikuti jalurnya. Penulis menerapkah hasil uji coba penulis dalam membuat bahu yang mengikuti jalurnya pada bahu DARPA MED. Dalam membuat rig bahu DARPA MED, penulis terlebih dahulu membuat kurva yang mengikuti bentuk dari jalur bahunya seperti pada gambar 3.81.
Gambar 3.81. Pembuatan kurva sesuai jalur bahu DARPA MED (Dokumentasi Pribadi)
Penulis kemudian membuat locator dan menggunakan motion path ke kurva jalur bahu DARPA MED untuk membuat locator bergerak mengikuti jalur kurva.
Langkah selanjutnya yang penulis lakukan adalah membuat locator objek. Untuk membuat objek sendi jalur bahu mengikuti locator objek, penulis melakukan parent constraint dan scale constraint objek ke locator tersebut. Penulis juga melakukan point constraint pada locator objek ke locator motion path untuk membuat gerakan locator objek dapat mengikuti locator motion path.
80 Penulis mendapati bahwa pergerakan objek masih bergerak berdasarkan timeline karena U value pada motion path memiliki keyframe. Penulis menghapus keyframe tersebut dan membuat controller untuk mengatur U value menggunakan set driven key, dengan translate Y controller sebagai driver dan U value sebagai driven. Pada saat controller berada pada posisi 5, maka U value dibuat menjadi 0 dan ketika posisi controller berada di posisi -3, maka U value dibuat menjadi 1.
Penulis juga melakukan pembatasan nilai minimum dan maksimum pada controller agar animator tidak menggerakkan lebih dari 5 atau kurang dari -3.
Gambar 3.82. Pembuatan controller U value motion path (Dokumentasi Pribadi)
Gambar 3.83. Pembatasan nilai minimum dan maksimum controller bahu DARPA MED (Dokumentasi Pribadi)
81 Pergerakan sendi bergerak mengikuti jalurnya dan dapat diatur dengan controller, tetapi adanya masalah di mana objek tidak mengikuti rotasi pada jalur karena locator objek hanya dilakukan point constraint ke locator motion path.
Gambar 3.84. Objek sendi bahu tidak berputar sesuai jalurnya (Dokumentasi Pribadi)
Penulis menggunakan connection editor untuk membuat koneksi perputaran dari locator motion path dapat ditransfer ke locator objek. Connection editor ini dapat dilihat pada gambar 3.85 di mana penulis mengoneksikan rotate Y pada locator motion path ke rotate X locator objek.
Gambar 3.85. Penggunaan connection editor (Dokumentasi Pribadi)
82 Penggunaan dari connection editor dapat bekerja dengan baik, tetapi penulis mendapati rotasi yang tidak sesuai ketika tubuh DARPA MED berputar seperti pada gambar 3.86.
Gambar 3.86. Putaran objek yang tidak sesuai ketika tubuh DARPA MED berputar (Dokumentasi Pribadi)
Untuk mengatasi masalah ini, penulis menggunakan set driven key dalam membuat perputaran locator objek. Translate Y pada controller bahu DARPA MED menjadi driver sedangkan rotate X pada locator objek menjadi driven.
Penulis melakukan set driven key sebanyak 3 kali. Set driven key pertama dilakukan sebelum menggerakkan controller ataupun locator. Hal ini dilakukan agar rotasi locator objek dapat menyesuaikan ketika berada di tengah jalur. Set driven key kedua dilakukan ketika translate Y controller bahu DARPA MED berada di posisi 5 dan rotate X locator objek berada di posisi -19,3. Angka pada rotate X locator objek penulis dapatkan dari rotate Y locator attached motion path. Set driven key ketiga dilakukan saat translate Y controller bahu DARPA MED berada pada posisi -3 dan rotate X locator objek berada pada posisi 14,2.
83 Gambar 3.87. Hasil objek mengikuti rotasi jalur bahu ketika tubuh DARPA MED
berputar (Dokumentasi Pribadi)
Tahap terakhir yang penulis lakukan adalah melakukan point constraint controller rotasi bahu DARPA MED ke locator objek pada pembuatan motion path, sehingga keseluruhan tangan akan selalu mengikuti pergerakan locator yang telah mengikuti jalurnya.
Gambar 3.88. Hasil lengan bergerak pada jalur bahu (Dokumentasi Pribadi)
Penulis melakukan hal yang sama pada pembuatan keseluruhan rig tangan kanan DARPA MED seperti yang penulis lakukan pada tangan kanannya. Dengan ini, perancangan rig untuk DARPA MED sudah selesai dan siap untuk dianimasikan.