Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 190
PEMBUATAN SISTEM PEMANTAUAN PERGERAKAN TITIK
Jurusan Teknik Geodesi Fakultas Teknik Universitas Gadjah Mada Telp: 0274 6492121 Faks: 0274 520226, http://geodesi.ugm.ac.id
INTISARI
Metode survei RTK (Real Time Kinematic) memanfaatkan layanan NTRIP
(Networked Transport of RTCM via Internet Protocol) dari stasiun CORS (Continually
Operating Reference Station) dapat dimanfaatkan untuk penentuan posisi dan
pemantauan pergerakan titik yang terletak pada pada lokasi tertentu (disebut kemudian dengan rover station) dari sebuah stasiun kontrol yang terletak jauh dari titik yang dipantau (disebut kemudian dengan monitor station). Salahsatu format data GNSS (Global Navigation Satellite System) yang mendukung sistem pemantauan pergerakan titik jarak jauh secara real-time adalah NMEA (National Marine Electronics Association). Permasalahan umum yang timbul dalam pembuatan sistem pemantauan titik secara real-time adalah bagaimana mendesain komunikasi data NMEA dari rover station ke monitor station, serta menyajikan pergerakan rover station pada monitor station. Makalah ini membahas tentang pembuatan sistem pemantauan pergerakan titik hasil penentuan posisi metode NTRIP menggunakan komunikasi data NMEA berbasis VPN (Virtual Private Network). Pembuatan sistem pemantauan pergerakan titik secara
real-time meliputi pekerjaan yang sangat luas. Penelitian ini difokuskan pada instrumentasi komunikasi data dan pengamatan pergerakan titik pada monitor station
secara visual.
Katakunci: GNSS CORS, NTRIP RTK, real-time remote monitoring, NMEA, VPN
ABSTRACT
Measurements by using RTK GNSS CORS technologies can be used to define position as well as to monitor the movement of a point located on a specific locations (known as rover station) from a control station (monitor station) which is located far from the point being monitored. Such GNSS data format that supports remote monitoring system is NMEA (National Marine Electronics Association). One of the problem on developing remote monitoring system is how to design the NMEA data communication from the rover station to the monitor station and how to observe the rover station’s movement on the monitor station. This paper focuses on the development of a monitoring system by using NMEA data communications through VPN (Virtual Private Network). The development of real-time remote monitoring system covers a very broad job. This study focuses on data communications instrumentation and visual observation of the rover position of the monitoring system.
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 191
1. PENDAHULUAN
CORS (Continually Operating Reference Station) adalah stasiun referensi GNSS (Global Navigation Satellite System) yang beroperasi secara kontinu (24 jam non-stop). CORS didesain sebagai stasiun referensi teliti yang bukan hanya memperoleh dan menyimpan data pengukuran, tetapi juga mengirimkan sinyal koreksi yang mendukung pengukuran GPS secara RTK (Real Time Kinematic) sehingga akurasi posisi yang diperoleh pengguna dapat ditingkatkan hingga level sentimeter (Chen, 2004). Sinyal
koreksi dikirimkan oleh CORS menggunakan metode NTRIP (Networked Transport of
RTCM via Internet Protocol) melalui jaringan internet ke rover station (Blacker, 2010).
Metode survei pengukuran menggunakan GNSS CORS secara RTK dapat dimanfaatkan untuk berbagai hal, diantaranya adalah penentuan posisi titik dan pemantauan pergerakan titik yang terletak pada pada lokasi tertentu (disebut kemudian dengan rover station) dari sebuah stasiun kontrol yang terletak jauh dari titik yang dipantau (monitor station).
Salahsatu format data GNSS yang mendukung sistem pemantauan pergerakan titik jarak jauh adalah NMEA (National Marine Electronics Association). NMEA adalah format data yang meliputi struktur, isi, dan protokol data GNSS yang diterapkan untuk keperluan komunikasi GNSS dengan peralatan elektronik lain. NMEA merupakan data berformat ASCII yang berisi informasi; posisi tiga dimensi (lintang, bujur , dan tinggi), waktu pengukuran (epoch), banyaknya satelit yang diamat, kualitas data, dan lain-lain (Hewerdine, 2005). Salahsatu permasalahan yang timbul dalam pembuatan sistem pemantauan titik secara real-time adalah bagaimana mendesain komunikasi data NMEA dari rover station ke monitor station, serta menyajikan pergerakan rover station
pada monitor station agar proses pemantauan pergerakan titik dapat diamati dari jarak jauh secara optimal dan efisien.
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 192
2. METODOLOGI
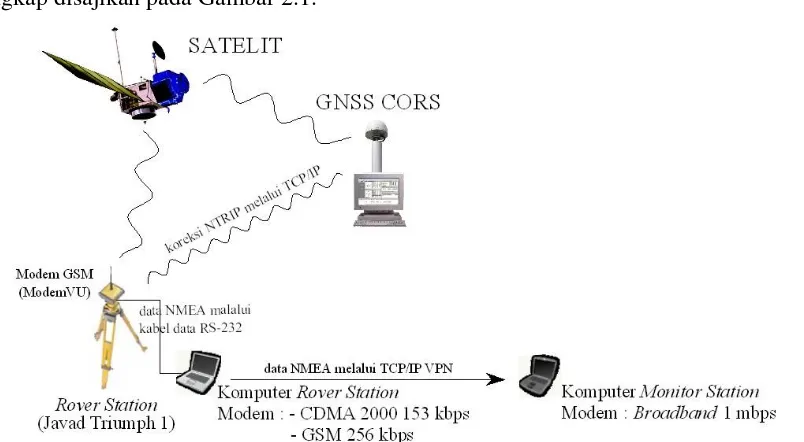
Sistem pemantauan yang dibangun dalam penelitian ini terdiri atas 3 komponen utama yaitu; stasiun GNSS CORS, rover station dan monitor station. Stasiun GNSS CORS yang digunakan dalam penelitian ini adalah CORS GMU1 milik Jurusan Teknik Geodesi Fakultas Teknik UGM. Rover station yang digunakan terdiri atas 1 unit
receiver GNSS double frequency merk Javad Triumph 1 (frekuensi 1 Hz, dilengkapi modem GSM), komputer dan modem internet. Monitor station terdiri atas sebuah komputer dan modem internet. Desain sistem pemantauan dan komunikasi data secara lengkap disajikan pada Gambar 2.1.
Gambar 2. 1. Desain sistem pemantauan pergerakan titik
Rover station terhubung ke CORS GMU1 melalui koneksi GPRS menggunakan
SIM Card GSM. Penentuan posisi pada rover station dilakukan menggunakan metode
RTK NTRIP dengan memanfaatkan mountpoint SB_GMU1_RTCM3.0 dari CORS
GMU1. Mountpoint tersebut menyediakan streaming sinyal koreksi RTCM versi 3.0 yang memungkinkan pengukuran RTK NTRIP menggunakan satelit GPS dan Glonass sekaligus. Receiver GNSS pada rover station dihubungkan ke serial port komputer
dengan menggunakan kabel RS-232. Komputer rover station terhubung dengan
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 193
yang digunakan pada rover station terdiri atas 2 buah modem dengan kecepatan maksimal masing-masing 153 kbps (CDMA 2000) dan 256 kbps (GSM). Penggunaan dua buah modem berbeda ini ditujukan untuk mengkaji pengaruh kecepatan koneksi internet dalam komunikasi data NMEA. Selanjutnya dilaksanakan simulasi pemantauan pergerakan titik untuk mengkaji penerapan sistem yang telah dibangun. Secara umum simulasi yang dilakukan ada dua, yakni:
1. Simulasi dengan menempatkan rover station pada lokasi terbuka dan pada lokasi yang berobstruksi, dengan rover station pada posisi diam. Ini dilakukan untuk mempelajari pengaruh obstruksi terhadap kualitas data posisi rover station.
2. Simulasi dengan menempatkan rover station pada lokasi terbuka dan
menggerakkan rover station ke arah atas bawah, utara-selatan dan timur-barat, masing-masing sebesar 20cm, 10cm, 5cm, dan 2.5cm, seperti tersaji pada Gambar 2.2. Hal ini ditujukan untuk mempelajari besar pergerakan rover station
yang bisa diamati secara visual pada monitor station.
Gambar 2. 2 Simulasi pemantauan pergerakan titik dengan rover station digerakkan ke arah atas bawah
3. HASIL DAN PEMBAHASAN
A. Hasil Data NMEA
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 194
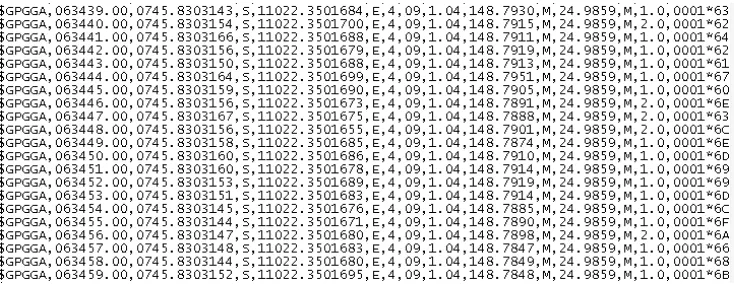
GGA dengan besar file 0.09 kB. Gambar 3.1 menampilkan contoh data NMEA yang diperoleh pada saat pengukuran.
Gambar 3. 1. Data NMEA hasil pengamatan
Dari contoh data NMEA pada Gambar 3.1, pada setiap barisnya terdiri atas data-data GNSS dengan susunan sebagai berikut:
$GPGGA,044415.00,0745.8297605,S,11022.3500524,E,4,10,0.87,149.3976,M,24.9859,M,1.0,0001*6C
Dalam hal ini,
$GPGGA = global positioning system fix data
044415.00 = waktu pengukuran pada 04:44:15:00 UTC
0745.8297605,S = posisi lintang 7o45.8297605’ LS 11022.3500524,E = posisi bujur 110o22.3500524’ BT
4 = solusi pengukuran RTK fixed (kualitas data)
10 = jumlah satelit yang diterima sebanyak 10 satelit
0.87 = horizontal dilution of precision
149.3976,M = posisi tinggi orthometrik 149.3976 meter
24.9859,M = tinggi geoid (msl) pada elipsoid WGS’84
1.0 = waktu dalam detik sejak DGPS terakhir di-update
0001 = nomor identitas stasiun DGPS
*6C = data checksum, selalu dimulai dengan simbol *
C. Hasil Simulasi Pemantauan Pergerakan Titik
Hasil simulasi pemantauan pergerakan titik ditampilkan pada monitor station
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 195
disajikan pada scatter gram. Lain halnya dengan posisi vertikal yang bisa diamati secara visual real-time pada monitor station, pergerakan posisi horisontal secara visual real-time sangat sulit untuk diamati pada perangkat lunak ini. Ini dikarenakan sistem koordinat yang digunakan pada scatter gram berupa lintang bujur. Untuk dapat mengamati pergerakan titik pada arah horisontal, koordinat lintang bujur dari data NMEA dirubah kedalam sistem proyeksi UTM, dan disajikan secara manual menggunakan Microsoft Excel.
Hasil pemantauan pergerakan titik pada rover station dengan posisi diam dan terletak pada lokasi terbuka, posisi yang diperoleh mempunyai kualitas data berupa RTK fixed dengan ketelitian sentimeter (± 2 cm). Gambar 3.2 menunjukan visualisasi data NMEA (untuk komponen tinggi) dengan rover station diam pada cakupan langit terbuka.
Gambar 3. 2 Visualisasi data NMEA dengan rover station diam pada cakupan langit terbuka
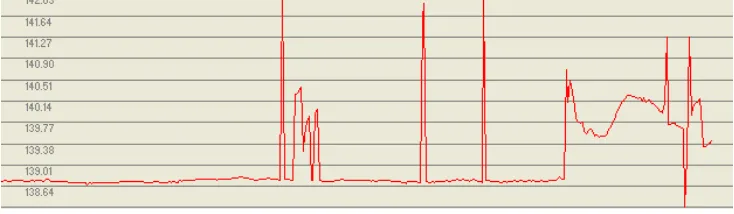
Hasil yang didapat dari simulasi rover station diam dengan lokasi tidak terbuka menunjukkan kualitas data yang bervariasi yaitu RTK fixed dan float RTK. Ketelitian posisi yang didapat bervariasi dari ± 2cm sampai 5m, seperti terlihat pada Gambar 3.3. Dari rentang ketelitian posisi tersebut, khusus untuk float RTK bervariasi dari 10dm hingga 5m.
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 196
Pada rover station diam dan bergerak keatas dan kebawah pada lokasi ideal data posisi yang diperoleh mempunyai kualitas data RTK fixed dengan ketelitian sentimeter. Dengan kualitas data ini, maka gerakan naik-turun rover station (dalam sentimeter) dapat terlihat jelas, seperti yang disajikan Gambar 3.4.
Gambar 3.4 Visualisasi data NMEA dengan
rover station bergerak naik turun
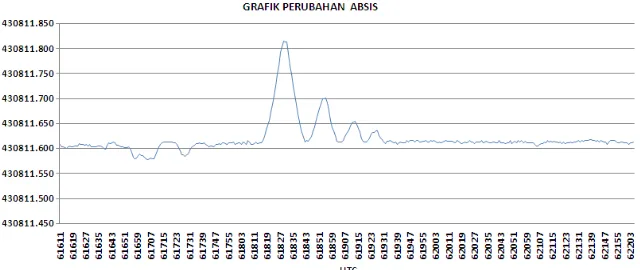
Pemantauan posisi dengan rover station diam pada lokasi terbuka dan bergerak timur-barat dan utara selatan mempunyai kualitas data RTK fixed dengan ketelitian sentimeter. Gerakan rover station pada arah timur-barat ditampilkan pada Gambar 3.5 sedangkan pada arah utara-selatan ditampilkan pada Gambar 3.6.
Gambar 3.5 Grafik perubahan absis dengan rover station
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 197
Gambar 3.6. Grafik perubahan ordinat dengan rover station
bergerak utara-selatan
Statistik dari Data NMEA dengan kualitas RTK fixed hasil simulasi pemantauan pergerakan titik dengan rover station dalam keadaan diam disajikan dalam Tabel 3.1
Tabel. 3.1 Statistik dari Data NMEA dengan kualitas fixed
Statistik X
rata-rata beda posisi antar epoch 0.119 0.101 0.306
beda posisi antar epoch terbesar 1.500 1.600 2.750
beda posisi antar epoch terkecil 0.000 0.000 0.000
simpangan baku nilai posisi 0.109 0.109 0.256
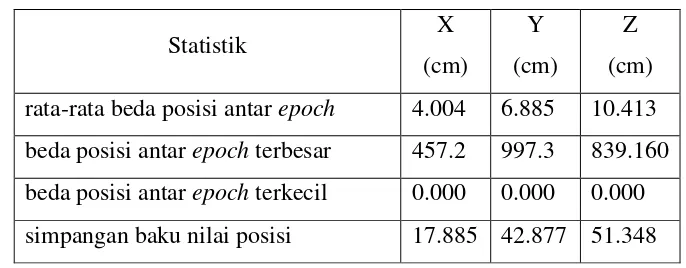
Statistik dari Data NMEA dengan kualitas RTK float hasil simulasi pemantauan pergerakan titik dengan rover station dalam keadaan diam disajikan dalam Tabel 3.1
Tabel. 3.2 Statistik dari Data NMEA dengan kualitas float
Statistik X
rata-rata beda posisi antar epoch 4.004 6.885 10.413
beda posisi antar epoch terbesar 457.2 997.3 839.160
beda posisi antar epoch terkecil 0.000 0.000 0.000
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 198
Dari hasil yang diperoleh di atas, perubahan posisi sebesar 2,5 cm ( gerakan terkecil) pada gerakan keatas dan kebawah dan utara-selatan timur-barat rover station, untuk kualitas data RTK fixed perubahan posisi ini secara visual masih dapat diamati.
C. Analisa Hasil Komunikasi Data NMEA
Analisa pengaruh kecepatan koneksi internet dalam komunikasi data NMEA secara real-time berbasis TCP/IP dapat dilakukan dengan membandingkan kecepatan mengunggah/upload speed, mengunduh/download speed (Garramone, 2007), kapasitas data NMEA yang diperoleh, informasi waktu dalam data NMEA. Komputer monitor station dalam komunikasi data NMEA berperan untuk mengunduh data sehingga kecepatan yang berpengaruh adalah download speed. Komputer rover station dalam komunikasi data NMEA berperan untuk mengunggah data, sehingga kecepatan yang berpengaruh adalah upload speed. Dari hasil tes kecepatan via speedtest.net diketahui bahwa monitor station menggunakan koneksi internet broadband Kampus Teknik Geodesi UGM mempunyai download speed sebesar 0.98 mbps (megabit per second) atau 122.5 kBps (kilobytes per second), sedangkkan modem pada rover station memiliki kecepatan mengunggah sebesar 0.04 mbps dan 0.05 mbps. Dari hasil simulasi komunikasi data diketahui bahwa proses transmisi data mengalami keterlambatan mengirim data NMEA rata-rata selama 5 detik. Komputer monitor station dengan
download speed sebesar 0.98 mbps tentunya tidak terjadi masalah dalam besarnya data NMEA yang diunduh. Data NMEA yang diterima, diunduh, divisualisasikan dan direkam (ditulis ke file) bergantung dari kecepatan rover station dalam mengunggah data tersebut.
4. KESIMPULAN DAN SARAN
Komunikasi data NMEA hasil penentuan posisi metode NTRIP RTK dari rover
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 199
posisi rata-rata per epoch yang berurutan sebesar 0.2 cm, perubahan data posisi terbesar rata-rata sebesar 2 cm, dan simpangan baku rata-rata sebesar 0.16 cm, menunjukan bahwa perubahan posisi sebesar 2.5 cm masih dapat diamati. Hasil simulasi dari pemantauan posisi titik pada lokasi dengan cakupan langit tidak terbuka dengan rover station pada posisi diam, menghasilkan perubahan data posisi rata-rata per epoch yang berurutan sebesar 7.1 cm, perubahan data posisi terbesar rata-rata sebesar 763.56 cm, dan simpangan baku rata-rata sebesar 37.37cm.
Daftar Pustaka
Blacker, C., 2010, Means of Delivering RTK Correction Signal, Precision Decision Ltd, New York-USA.
Chen. R., 2004, Test Results of an Internet RTK System Based on the NTRIP Protocol, Finnish Geodetic Institute, Masala-Finland.
Garramone, dkk, 2007, Real Time Kinematics GPS Positioning Using Web-Based Corrections, GEOS 2007, Matera-Italy.
Seminar Nasional GNSS-CORS Yogyakarta, 17 Juli 2010
Prosiding Seminar Nasional “GNSS CORS: Pengembangan dan Aplikasinya di Indonesia” 200
Biografi Penulis
Dedi Atunggal ST M.Sc adalah salahsatu staf pengajar Jurusan Teknik Geodesi FT-UGM yang aktif melakukan penelitian di bidang aplikasi teknologi GNSS. Beberapa karya ilmiah terpilihnya telah dimuat di conference internasional seperti; ION GNSS 2008, Map Asia 2007 dan Map Asia 2008.
Bilal Ma’ruf ST MT adalah salahsatu staf pengajar Jurusan Teknik Geodesi FT-UGM yang aktif meneliti tentang jaring GPS, studi deformasi berbasis GPS, dan studi pemantauan gerakan massa tanah pada daerah rawan longsor.