SISTEM KONTROL OPTIMAL PADA KONTROL POSISI MOTOR DC
Asnil(1), Irma Husnaini(2) (1)(2)
Dosen Jurusan Teknik Elektro, Fakultas Teknik Universitas Negeri Padang
Abstrak
Pengaturan posisi motor DC menggunakan kontrol optimal dengan metode LQR untuk melihat performansi yang berkaitan dengan kestabilan dan kecepatan respon sistem dilakukan dengan membandingkan control PID dan LQR dalam keadaan gangguan dan tanpa gangguan. Posisi referensi plant yang diberikan sebesar 110 dan 600. Hasil pengujian saat adanya gangguan memperlihatkan kontroler PID dan LQR memiliki performansi yang baik dengan settling time masing-masing t= 0.72 detik dan t= 0.48 detik. Saat adanya gangguan, waktu yang dibutuhkan sistem dengan LQR untuk mencapai kestabilan sama dengan keadaan tanpa gangguan yaitu 0.48 detik, sedangkan nilai persentase overshoot berturut-turut 0.384 % dan 0.599% untuk posisi 110 dan 600. Pada kontroler PID, peningkatan gangguan menyebabkan meningkatnya nilai overshoot, gangguan 0.5 Nm menyebabkan overshoot berturut-turut 69,4 % dan 28.9% untuk posisi 110 dan 600 dengan waktu settling maing-masing 1.0 detik dan 0.86 detik. Hasil pengujian model plant motor DC memperlihatkan LQR lebih responsif terhadap gangguan dibandingkan kontroler PID.
Kata kunci : Kontrol optimal , Performansi , LQR, Kestabilan, Motor DC
EKSERGI ISSN 0216-8685
JURNAL TEKNIK ENERGI Vol. 6 No. 1. 2010
I. Pendahuluan
I.1. Latar belakang masalah
Sistem kendali telah memegang peranan yang sangat penting dalam kehidupan sehari-hari. Sistem kendali yang semakin berkembang dapat meningkatkan kinerja sistem, kualitas produksi dan menekan biaya produksi. Keberadaan kontroler dalam sebuah sistem kontrol mempunyai kontribusi yang besar terhadap prilaku sistem. Pada prinsipnya hal itu disebabkan oleh tidak dapat diubahnya komponen penyusun sistem tersebut. Artinya, karakteristik plant harus diterima sebagaimana adanya, sehingga perubahan perilaku sistem hanya dapat dilakukan melalui penambahan suatu sub sistem, yaitu kontroler. Masalah umum dalam sistem kontrol adalah pencapaian spesifikasi performansi yang berkaitan dengan kestabilan dan kecepatan respon sehingga akan menghasilkan sistem kontrol yang optimal. Hal lain yang juga perlu diperhatikan adalah bagaimana spesifikasi performansi tersebut dapat dicapai.
Beberapa tahun terakhir ini, telah banyak usaha yang dilakukan untuk pengembangan metode kontroler terutama di dunia industri yang disebut metode kontrol modern . Metode dan teori kontrol automatik konvensional sudah lama berkembang sejak pertengahan abad 19. Metode Tempat Kedudukan Akar, Nyquist, diagram Bode dan sebagainya adalah beberapa metode yang menggunakan kawasan frekuensi sebagai domain pembahasan yang telah memberikan sumbangan berarti, khususnya untuk sistem sederhana.Semua metode di atas digunakan untuk sistem linier dan tidak berubah waktu (misalnya sistem kontrol PID), akan tetapi jika sistem tidak linier atau linier tetapi berubah waktu dan sistem dengan multi input-multi output maka kriteria kestabilan sedemikian tidak berlaku (Ogata, K, 1997). Perkembangan selanjutnya untuk sistem yang memerlukan perhitungan real time dan kualitas output dengan indeks performansi maka berkembang metode sistem kontrol diantaranya adalah sistem kontrol optimal .
Diantara keuntungan dari sistem kontrol optimal adalah prosedur perancangan dapat dipakai untuk sistem-sistem linier yang berubah terhadap waktu, serta sistem yang dirancang tidak hanya stabil tetapi juga menjadikan sistem kontrol yang optimal
Sistem Kontrol Optimal adalah konsep optimasi sistem kontrol yang mem-perhitungkan pemilihan indeks atau kriteria performansi serta desain yang akan menghasilkan sistem kontrol optimal dalam batas-batas kendala fisik. Indeks performansi didefinisikan sebagai suatu fungsi yang harganya menunjukan seberapa baik performansi sistem yang sebenarnya mendekati performansi yang diinginkan. Pada sebagaian kasus praktis perilaku sistem dioptimalkan dengan memilih vektor kontrol sedemikian rupa sehingga indeks performansi diminimumkan dan atau dimaksimumkan. Secara garis besar teori kontrol optimal adalah suatu teori kontrol yang pencarian solusinya didasarkan pada usaha untuk meminimumkan atau memaksimalkan suatu fungsi indeks kinerja. Fungsi ini terdiri dari beberapa buah variabel sistem yang diminimasi harganya dengan memberikan matrik bobot yang menyatakan besarnya pembobotan untuk masing-masing variabel sistem tersebut (Saiful Manan) .
Linier Quadratic Regulator (LQR)
I.2. Maksud dan Tujuan
Tujuan penelitian ini adalah membandingkan kinerja kontrol optimal menggunakan metode PID dan LQR untuk pengontrolan posisi motor dc dengan memberikan perubahan masukan posisi dan melihat pengaruhnya terhadap keluaran yang diinginkan serta performansi yang berkaitan dengan kestabilan sistem, sehingga terpenuhinya kebutuhan sistem yang stabil untuk setiap perubahan posisi motor dc. Secara khusus, tujuan penelitian ini adalah:
I.3. Tinjauan Pustaka
I.3.1. Model Matematis untuk Motor DC Motor DC mempunyai medan eksitasi yang terpisah sehingga pengontrolan motor dc dapat dibedakan, motor dc arus medan tetap dengan pengontrolan arus jangkar dan motor dc arus jangkar tetap dengan pengontrolan arus medan. Pengontrolan arus medan penguatan yang dibutuhkan dapat disederhanakan karena kebutuhan daya yang rendah. Namun menyediakan arus yang konstan jauh lebih sulit dalam pengontrolan medan dengan beban motor yang selalu berubah. Sedang pada pengontrolan arus jangkar gaya gerak listrik balik bekerja sebagai redaman dan pada pengontrolan arus medan tidak ada sehingga untuk redaman diperlukan, harus diberikan oleh motor dan beban. Selain itu kontrol arus medan mempunyai efisiensi yang rendah dan energi panas yang terjadi pada jangkar menimbulkan persoalan tersendiri. Konstanta waktu motor dc dengan penngontrolan medan biasanya lebih besar dari konstanta waktu motor dc pengaturan arus jangkar yang sebanding. Meskipun demikian dalam membandingkan konstanta waktu antara operasi dengan pengontrolan arus medan dan pengontrolan arus jangkar harus mempertimbangkan konstanta waktu penguat daya dalam studi operasi pengontrolan jangkar sehingga dalam penerapan sistem kotrol optimal indeks kinerja linear kuadratik ini digunakan motor DC pengontrolan arus jangkar.
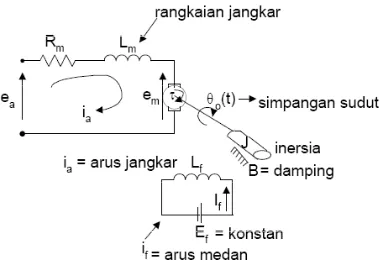
Motor DC dengan pengontrolan jangkar menggunakan medan magnet permanen yang tetap. Gambar berikut ini adalah pemodelan dengan rangkaian listrik dari motor DC pengontrolan jangkar dan diagram fisiknya.
Gambar 1. Motor DC dengan Pengontrolan Arus Jangkar
(phillips, 1998)
Pada gambar ini dimana : ea = tegangan jangkar
Rm= tahanan jangkar
Lm = induktansi jnagkar
em = tegangan EMF-balik
if = arus medan (konstan)
= fluks (konstan) medan
0
θ
= sudut poros motor K = konstanta motorT = torsi yang dibangkitkan oleh poros
J = momen inersia
Torsi motor T, dihubungkan dengan arus jangkar ia, oleh faktor pengali Ki. Sedangkan
gaya gerak listrik balik em , dihubungkan
dengan kecepatan sudut melalui persamaan berikut :
dt d K t
em( )=
φ
θ
0 (1)Kita asumsikan bahwa fluks φ konstan, sehingga
dt d K t
em( )= m
θ
0 (2)) ( . )
(t K i. t
T(t)= Ki.ia(t) (4)
Dari gambar 1, dapat kita turunkan persamaan motor berdasarkan Hukum Newton dan Kirchoff
Ktia
dt t d B dt
t d
J (2 ) () .
2
=
+
θ
θ
(5)
) ( ) ( ) ( . ) (
t e t e t i R dt
t di
L a m a a m
m + = − (6)
( ) m.a( ) a m.
θ
&a
m R i t e K
dt t di
L + = −
(7)
Gunakan transformasi Laplace, maka persamaan diatas dapat ditulis sebagai:
(Js2+Bs)θ(s)= Kt.Ia(s) (8)
) ( )
( ) ( )
(Ls+Ra Ia s = Ea s −Kts
θ
s (9) Dengan menyelesaikan persamaan diatas, kita dapatkan fungsi transfer sebagai berikut, dimana kecaatan sudut sebagai keluaran dan tegangan jangkar sebagai masukannya.2
) )(
( ) (
) (
t t
a JS b LS R K
K
s E
s
+ + +
=
θ
(10)
I.3.2. Sistem Kendali Digital
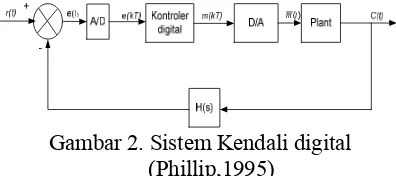
Blok diagram yang memperlihatkan suatu sistem kendali digital dapat dilihat pada Gambar 2, (Phillip,1995) . Komputer digital melaksanakan fungsi kompensasi didalam sistem. Antar muka pada masukan komputer adalah suatu pengubah analog ke digital (A/D) yang diperlukan untuk mengubah sinyal galat, yaitu suatu sinyal waktu kontinyu kedalam suatu bentuk linier yang dapat diproses komputer. Antara muka pada keluaran komputer diperlukan untuk mengaktifkan kendalian , yang disebut suatu pengubah digital ke analag (D/A), (Phillip,1998).
) (t m
Gambar 2. Sistem Kendali digital (Phillip,1995)
Berdasarkan Gambar 2, pengubah A/D pada masukan pengendali akan mengubah sinyal waktu kontinyu e(t) kesuatu deretan bilangan e(kT), pengendali digital akan mengolah deretan angka e(kT) ini dan menghitung deretan angka keluaran m(kT) . Deretan angka m(kT) ini kemudian dikonversikan kesinyal waktu kontinyu
) (t
m melalui pengubah D/A. Pengendali dan pengubah A/D dan D/A serta kendalian yang berkaitan dapat diberikan dalam bentuk diagram blok seperti terlihat pada Gambar 3. Berdasarkan Gambar 3 diperoleh,
) ( * ) ( * ) ( ) ( ) ( )
(s Rs G s H s D s E s
E = − (11)
C(s)=G(s)D*(s)E*(s) (12)
s e−Ts
−
1
Gambar 3. Sistem Kendali digital dengan Pengubah A/D dan D/A
(Phillip,1995)
Tanda bintang persamaan untuik E(s), dan menyelesaikan E*(s) diperoleh
) ( * ) ( * 1
) ( * )
( *
s H G s D
s R s
E
+
= (13)
Transformasi-z dari persamaan untuk C(s) dengan mensubsitusikan E*(s)pada persamaan diatas diberikan oleh
) ( ) ( ) ( 1
) ( ) ( )
( R z
z H G z D
z G z D z
C
+
= (14)
)
Persamaan diatas merupakan fungsi transfer closed loop dari sistem kendali digital berdasarkan Gambar 3. Jika pengendali digital yang digunakan adalah PID, dengan
) (t
e adalah masukan ke alat kontrol PID, keluaran m(t) dari alat kontrol ini diberikan oleh
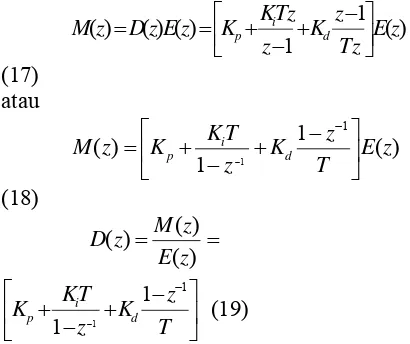
Algoritma pengendali PID dalam bentuk digital sebagai berikut
Pengendali PID digital diperlihatkan pada Gambar 4.
Gambar 4. Pengendali PID digital (Phillip,1995)
Fungsi transfer pengendali PID dapat ditulis dalam bentuk, (Tang,1999),
n Dimana
Pengendali PID memiliki fungsi alih sebagi berikut, (Phillips,1995, Tang,1999):
⎥⎦
ditentukan dengan proses perancangan.
I.3.3. Pengendali Proposional
Elemen pertama dari kendali PID yang akan dikembangkan yaitu kendali proporsional. Dinamika dari pengendali proporsional adalah memberikan suatu nilai dalam bentuk konstanta yang besarnya dapat diubah-ubah sesuai dengan kebutuhan keluaran sistem yang hendak dicapai. Untuk pengendali proporsional, hubungan antara masukan pengendali m(t) dengan sinyal
sistem menjadi tidak stabil (Ogata,1997, Rusli, 1997) .
I.3.4. Pengendali Proporsional Plus Integral (PI)
Kekurangan pengendali proporsional dapat dihilangkan dengan memasukkan elemen pengendali integral. Bentuk persamaan pengendali PI adalah sebagai berikut (Phillips, 1998).
dt t e K t e K t m
t
i
p +
∫
=
0 ) ( )
( )
( (28)
Sehingga fungsi alihnya dapat ditulis sebagai berikut
) 1 1 ( )
( ) (
) (
− + +
= =
z z K K z D z E
z M
I
p (29)
Elemen pengendali integral mempunyai kelemahan dalam respon dinamik, dimana pengaturan lingkar tertutup berosilasi dengan amplitudo yang mengecil secara perlahan atau bahkan amplitudo yang membesar, biasanya kedua hal ini tidak diinginkan. Beberapa sifat pengendali Proporsional plus Integral, (Ogata,1997): a. Aksi kendali proporsional cendrung
menstabilkan sistem
b. Aksi kendali integral cendrung menghilangkan atau memperkecil galat keadaan tunak dari tanggapan terhadap berbagai masukan
I.3.5. Pengendali Proporsional Plus Derivatif (PD)
Kendali derivatif selalu digunakan bersama-sama dengan aksi proporsional. Aksi kendali derivatif mendahului kesalahan pengerak, mengawali aksi koreksi dini dan cendrung memperbesar kesatbilan sistem. Bentuk persamaan pengendali PD adalah (Phillips, 1998),
dt t de K t e K t
m()= p ( )+ d ( ) (30)
Beberapa sifat pengendali PD ini adalah sebagai berikut (Ogata,1997);
a. Elemen derivatif dapat menyebabkan efek saturasi pada pengendali dan tidak dapat berdiri sendiri mengingat komponen ini hanya bekerja hanya selama masa transient atau perubahan. b. Mode derivatif dapat mengatasi
perubahan beban seketika.
c. Offset galat tidak dapat dihilangkan, akibat adanya komponen porposional
I.3.6. Desain Kontrol Optimal Kuadratik Metode klasik, sistem kontrol mula-mula dirancang dan selanjutnya kestabilannya diuji. Sedangkan dalam metode yang akan dibahas ini, kondisi kestabilannya yang pertama dirumuskan, setelah itu sistemnya dirancang dalam keterbatasannya (Ogata,1997). Dengan menggunakan analisa ruang keadaan (state space) maka akan memungkinkan dilakukan sistem kontrol yang optimal terhadap indeks performans yang diberikan. Variabel keadaan suatu sistem dinamik dimaksudkan sebagai himpunan terkecil dari variabel-variabel yang menentukan keadaan sistem dinamik sedemikian rupa sehingga dengan mengetahui variabel ini dapat menentukan secara lengkap perilaku sistem untuk setiap waktu t ≥ t0 dan dengan syarat awal pada t =
t0 .Selain itu variabel keadaan tidak perlu
merupakan besaran yang secara fisik dapat diukur atau diamati, namun secara praktis sebaiknya dipilih variabel keadaan yang merupakan besaran yang dapat diukur secara mudah karena hukum kontrol optimal akan memerlukan umpan balik semua variabel keadaan dengan matrik pembobotan yang sesuai.
Sistem kontrol yang ditinjau memiliki persamaan sistem :
x (k+1) = Gx(k) + Hu(k) (31) Matrik K vector kontrol optimal didifinisikan sebagai
u(k) = -Kx(k) (32)
dimana
u(k) = vektor kontrol (r-vektor) G = matriks konstan n x n H = matriks konstan n x r K = penguatan r x n
Untuk merancang sistem kontrol yang selalu stabil, sistem kontrol yang dirancang berdasarkan pada meminimumkan indek kinerja kuadratik dengan persamaan (Lewis,1992, dan Ogata,1994),
∑
−=
+ +
= 1
0
)] ( ) ( ' ) ( ) ( ' [ 2 1 ) ( ) ( ' 2
1 N
k
k Ru k u k Qx k x k
Sx k x
J (33)
Pertimbangkan masalah kontrol optimal kuadratik untuk proses yang berlangsung secara kontinu tanpa batas, atau N = ∞, solusi persamaan kontrol optimal menjadi solusi persamaan steady state, maka indek kinerja kuadratik yang diminimumkan dapat dimodifikasi sebagai
∑
∞=
+ = 1
0
)] ( ) ( ' ) ( ) ( ' [ 2 1
k
k Ru k u k Qx k x
J (34)
Dan persamaaan Riccati ditulis
P= Q + G’P (I + HR-1H’P)-1G (35)
= Q + G’P (P-1+ HR-1H’)-1G (36)
Dimana
Q = matriks bobot definitif positif atau matrik simetrik real (n x n )
R = matriks bobot definitif positif atau matrik simetrik real (r x r)
S = matriks bobot definitif positif atau matrik simetrik real (n x n )
P(k)= solusi persamaan Ricccati(matriks definitif positif)
Untuk menentukan matrik penguat umpan balik K digunakan persamaan
K =(R+H'PH)−1H'PG (37) Dengan mensubsitusikan persamaan (37) pada persamaan (32), maka vektor kontrol optimal dapat ditulis sebagai
) ( ' ) ' ( )
(k R H PH 1H PGxk
u =− + − (38)
Subsitusikan persamaan (38) dalam persamaan (31) diperoleh sistem regulator optimal dengan persamaan
) ( ] ' ) ' ( [ ) 1
(k G H R HPH 1HPGxk
x + = − + −
) ( ) '
(I+HR−1H P −1Gx k
= (39)
Nilai minimum indek kinerja J diberikan oleh persamaan
Jmin = ½ x’(0) P (0) x(0) (40)
Dimana Q dan R dipilih positif definitif agar menghasilkan sistem yang selalu stabil. Realisasi kontrol optimal dalam keadaan
steady state membutuhkan solusi persamaan Riccati dalam keadaan steady state. Persamaan riccati nonsteady state diberikan oleh
G k P H H k P H R H k P G G k P G Q k
P()= + ' ( +1) −' (+1) [ + ' (+1) ]−1 ' (+1) (41)
atau
G k P H H k P H R H k P G G k P G Q k
P( +1)= + ' () − ' () [ + ' () ]−1 ' () (42) Blok diagram sistem kendali optimal dengan metode LQR seperti gambar dibawah ini:
Gambar 5. Blok diagram sistem kendali
dengan metode LQR (Ogata,1994)
Untuk menentukan unit-step sistem digunakan blok diagram seperti gambar 5, input r(k) diasumsikan unit-step respon. Persamaan sistem diberikan oleh :
x(k + 1) = Gx(k) + Hu(k) (43)
y(k) = Cx(k) (44)
Persamaan untuk integrator dalam bentuk
sehingga
u(
Dengan pada pers
x(k + 1)= x(k + 1) =
dimana : Karena
v(k + 1)
dimana y(
I.4. Man Manfaat adalah pertimban kontrol p sistem ko perubaha
II. Metod Pe PID dan motor D penelitian koefisien untuk me ingin dic berhubun sistem melakuka DC tanp gangguan 1. Studi
posisi PID da 2. Penur
plant servo) alih da
(k) = -Kx(k
faat Penelit yang dihara sebagai b ngan untuk posisi moto ontrol yang an beban.
de Penelitia enelitian ini
LQR untuk DC servo H n terdiri da n kontroler
etode LQR. capai adalah ngan denga
dan persen an perubaha pa ganggua n. Tahapan p literatur m motor DC an LQR runan persam
yang akan ) dalam be an state spac
) + K1v(k)
usikan pers diperoleh:
-Kx(k) + K1
x(k) + HKIv
k2 k3]
k + 1) – y(k
ran sistem
tian
apkan dari p bahan mas k implemen or DC aga
stabil dan op
an
i mengguna k mengatur HITEC
HS-ari penentua PID dan m Kriteria pen h kestabilan an kecepa ntase oversh an terhadap an dan den penelitian ini mengenai sis C mengguna
maan mode n dikontrol entuk persam
ce .
(46)
amaan (46
v(k)] (47)
v(k) (48)
(49)
+ 1) (50)
penelitian in sukan atau ntasi sistem ar dihasilkan ptimal akiba
akan metode posisi pada -422. Tahap an koefisien matrik bobo nelitian yang
sistem yang atan respon hoot dengan posisi moto ngan adanya
i terdiri dari: stem kendal akan metode
el matemati (motor dc maan fungs
6)
III. Has M dan deng
Ga step lu kontrole
Gamb
gumpulkan d o HITEC HS or DC dan ha akukan peng gatur posisi EC HS-422
dan LQR d anpa ganggu isa terhadap
sil Dan Pem Motor DC se an ini adala dengan p
efisien visko = 0.008
men inersia 5.7e-007 Kg nstanta torsi m =0.0134 Nm
uktansi jang hanan jangka
ngkah pertam an lup tertut er dan di an dilanjuk er PID untuk da perubahan
gan adanya g ambar berik up tertutup er.
bar 6. Respon tanpa
data parame S-422 melal asil proses id gujian kon
model mot 2 mengguna
dengan adan uan.
hasil pengu
mbahasan ervo yang di ah motor D parameter m
os rotor dan b
rotor dan be g/m2
motor, m/A
kar La=6.5e ar Ra =1.9 O ma yang dila tup plant mo iamati resp kan denga k mengontro n posisi tan gangguan . kut memperl
sistem ta
n step lup te a kontroler
eter motor D lui data she dentifikasi. ntroler untu
tor DC serv akan metod nya ganggua
ujian.
igunakan pad eluxe HITE motor sebag
beban ,
eban ,
e-005 H Ohm
akukan adala otor DC tanp pon stepny an pengujia
l posisi mot npa ganggua
ihatkan repo anpa adany
Hasil res kontroler dengan w
Pen masukan sistem ak posisi tan
Gam memperli PID untu pengujian pada saat kemudian menuju p atau 1.04 dipilih da 0.2 radia adalah :
Kp = 2. Ki = 0.0 Kd = 0.
spon step lu r diperoleh s waktu setling ngujian peng r PID diginak
ah ini.
r 7. Diagram mo
ontrol Posis ntroler PID ngguan
telah respon kontroler n untuk peng DC sesuai d yang dibe kan selalu npa ganggua mbar 8 ihatkan has uk mengontro ni ini diasum t start adalah n motor haru posisi 110 a 47 radian. P alam penguj an dan 1.04
0 001;
00001;
up tertutup sistem menuj g sekita 1.8 d
garuh pemb kan model p
m kontrol un tor DC
si Mengguna Dan LQR T
n step lup te diperoleh, gontrolan po dengan refe erikan dan
stabil setiap n.
dan 9 b sil pengujia ol posisi mot msikan sudut
h berada pad us mengger atau 0.2 rad
Parameter k ian diatas u 7 radian ma
plant tanpa uju kestabilan
detik.
ebanan pada pada Gamba
ntuk sebuah
akan Tanpa
ertutup plan dilakukan osisi keluaran erensi posis
diharapkan p perubahan
berturut-turu an kontrole tor DC. Pada t poros moto da posisi 00 akkan beban dian dan 60
kontrol yang untuk posis asing-masing respon kontrole dibutuhk stabil d masing 0.6 deti posisi 0.
R = 0.00 dan 0.59
3.2. Ko DC sesu yang dib
mbar 8. Respo gan kontrole
gangguan un
mbar 9. Respo gan kontrole angguan untu
ari Gambar sistem er PID cuk
kan untuk dengan men – masing ik dengan pe
ri gambar d an kontroler motor DC un
dan 600 at yang dipilih
.2 radian dan
01;
0 0 0; 0 1 0
yang dibut yang stabil erada pada t= ngkan men ase Overshoo 9% untuk po
ontrol Posisi ntroler PID anya Gang engujian pe han beban te mengontrol uai dengan r berikan, dila
on lup tertut er PID dan L
ntuk posisi 0
on lup tertut er PID dan L
uk posisi 1.0
r 8 dan 9 dengan m kup baik,
mencapai nggunakan k
berada pada ersentase Ov di atas juga r LQR untu
ntuk posisi tau 1.047 ra
dalam pen n 1.047 radi
0; 0 0 1 0
tuhkan untu dengan m = 0.48 detik nggunakan
ot 0.66% un osisi 600.
i Mengguna D Dan LQR
gguan engaruh ga erhadap kest l posisi ke referensi po akukan deng
tup sistem
dapat dilih menggunaka
waktu yan sistem yan kontroler PI a t= 0.72 da vershoot 0.05 terlihat has uk mengontr
i 110 atau 0 adian. Matr ngujian untu
an adalah :
0;0 0 1];
uk mencap menggunaka k , lebih cep
PID denga ntuk posisi 1
akan Dengan
beban t diberikan 0.5 Nm. D sudut po berada pa menggera 0.2 radia pengujian kontroler gambar b
Gamb beban pa kontroler atas per makin be overshoo dibutuhka berturut-t persentas
torsi pada n mulai dari
Dalam peng oros motor
ada posisi 0 akkan beban an dan 600
n pengaru r PID dan L berikut.
ar 10. Respo n kontroler angguan un
bar 11 Respo n kontroler P
ngguan untu
ar 10 dan 1 n yang menu LQR terhad ada poros m r PID mamp rubahan be esar beban m otnya, seda
an sistem un turut 0.86 de se oversho
motor. B 0, 0,1 Nm,
gujian ini pada saat 00, kemudian n menuju po atau 1.047 r uh pembeb LQR diperl
on lup tertutu PID dan LQ ntuk posisi 0.
on lup tertutu PID dan LQ uk posisi 1.0
11 memperli ujukkan resp dap gangguan
motor). Nam pu menjaga eban, namu
maka makin angkan w ntuk mencap etik dan 1.0
ot untuk
Beban yang 0.3 Nm dan
diasumsikan start adalah n motor haru osisi 110 atau
radian. Hasi banan pada
ihatkan pada
up sistem
ihatkan hasi pon kontrole n (perubahan mpak bahwa konvergens un demikian
n tinggi pula waktu yang pai kestabilan 0 detik. Nila
posisi 11 g masing dan 28 dalam p radian adalah :
Kp1 atas per berarti yang dip 110 dan sistem sekitar 0 menggu
IV. Ke Be menggu dengan ganggua untuk pemb n 0.5 Nm, ase ovesho
gangguan to .9%. Param pengujian d
dan 1.047
= 3.3 = 3.5 = 0.00001;
= 3.0 = 3.5 = 0.00001;
Gambar 10 er LQR dalam
if terhadap p er LQR mam rubahan be
pada over pilih dalam
600 adalah:
001; 0 0 0; 0 1
persentase % dan 0,599
edangkan w untuk men 0.48 detik, l unakan PID.
esimpulan erdasarkan p unakan kon
adanya gan an dapat disi tode LQR u tor DC mem oh dan kete ukti walaup ngalami ga sih stabil dan
em untuk m nya ganggua
ri 29.3%, bebanan tors
sedangaka ootnya unt orsi sebesar 2 meter kontro
iatas untuk radian m
dan 11 na m kasus kon perubahan b mpu menjag
ban tanpa rshootnya. M
pengujian
0 0; 0 0 1
overshoot 9% untuk p waktu yang ncapai kesta lebih cepat
penelitian k ntroler PID ngguan atau impulkan seb
untuk meng mpunyai ke elitian yang pun sinyal k angguan, ou n waktu yan mecapai kesta an mendekat
, 48,7% da si 0.1 Nm, 0 an posisi 6 tuk masin 22.1%, 25,5 l yang dipil k posisi 0 masing-masin
ampak bahw ntrol posisi i beban, terlih a konvergen peningkatka Matrik bob untuk posi
0;0 0 0 1
berturut-tur osisi 110 da g dibutuhka abilan adala dibandingka
kontrol posi D dan LQ tanpa adany bagai beriku gontrol posi stabilan yan
tinggi hal i kontrol suda
utput siste ng dibutuhka
abilan denga ti waktu yan
dibutuhkan sistem tanpa adanya gangguan.
b. Pada penelitian posisi tanpa adanya gangguan atau dengan adanya gangguan, respon sistem dengan menggunakan kontroler LQR lebih cepat mencapai sistem yang stabil dibandingkan menggunakan kontroler PID .
c. Dari penelitian menggunakan kontrol PID untuk sistem kontrol posisi dengan adanya ganguan, sistem masih mampu menjaga konvergensi atas perubahan beban, namun perubahan beban atau gangguan yang besar menyebabkan oveshootnya makin tinggi pula.
d. Pemakaian kontroler LQR dapat dipertimbangkan untuk sistem dengan adanya perubahan beban atau gangguan.
V. Daftar Pustaka
Dorf, Rc. And Bishop, RH, 1995, Moderen Control System, 7Th Edition, Addison Wesley Publishing Company.
Garg, Aditya, 2001, Adaptif and Optimal Tracking Control of Electromechanical Servosystem, Thesis.
Gopal, M, 2004, Digital Control and State
Variable Methods, 2nd Edition,
McGraw-Hill Publishing Company Limited.
Hasan, 1998, Aplikasi Sistem Kontrol Optimal dalam Reaktor Nuklir, Elektor Indonesia , Edisi ke Dua Belas
Lewis,L. Frank, 1992, Applied Optimal Control & Estimation, Prentice Hall International. Inc.
Ogata, K, 1997, Moderen Control Engineering, 3rd Edition, Prentice Hall International. Inc.
Phillips, L. Charles, 1995, Digital control System, 3rd Edition, Prentice Hall International. Inc.
Phillips, L. Charles and R.J Widodo, 1998 ,
Sistem Kontrol Lanjut. 3rd Edition, Eedisi Bahasa Indonesia, PT Prenhallindo, Jakarta.
Rusli, Mohammad: 1997, Sistem Kontrol kedua, Malang: Teknik Elektro -Universitas Brawijaya