TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Hugo Yulian Nathanael
NIM : 025114039
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Name : Hugo Yulian Nathanael
Student Number : 025114039
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF ENGINEERING
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
Kupersembahkan karya tulis ini kepada :
Tuhan Yesus Kristus terkasih,
Bapak dan Ibu Tercinta,
Kedua saudaraku Ade dan Ani tercinta,
Keluarga besarku tercinta,
Kekasihku Lina tersayang, dan
Almamaterku Teknik Elektro USD
tiada kehidupan tanpa kesalahan, kekalahan dan kegagalan.
satu-satunya dari seluruh rahasia adalah belajar menarik keuntungan dari kesalahan-kesalahan dan
kegagalan-kegagalan.
satu-satunya kegagalan dalam hidup ini adalah kegagalan untuk mencoba.
(Harold Sherman)
Lebih baik bertempur dan kalah dari pada tidak pernah bertempur sama sekali.
Kesempurnaan manusia yang sejati bukan pada apa yang dimilikinya melainkan bagaimana dirinya.
perancangan tapis FIR, dari penentuan spesifikasi, perhitungan koefisien tapis, relisasi struktur dan perhitungan wordlength effect.
Program akan menghitung koefisien tapis dari spesifikasi masukan dan merepresentasikan koefisien tapis tersebut menjadi jumlah bit tertentu (kuantisasi). Perhitungan koefisien tapis FIR menggunakan metode Jendela dan metode Optimal. Koefisien tapis yang terkuantisasi kemudian direalisasikan dalam bentuk struktur, struktur yang digunakan untuk merealisasikan tapis FIR adalah transversal structure
dan linear phase structure. Dari tapis yang telah direalisasikan dalam bentuk struktur tersebut kemudian dihitung finite wordlength effect yaitu coefficient quantization errors dan roundoff erorrs.
Program simulasi untuk realisasi struktur tapis FIR telah diimplementasikan dan dilakukan pengujian untuk mengamati kinerja tapis hasil perancangan. Kinerja tapis hasil perancangan diamati dari kurva tanggapan frekuensi yang merupakan keluaran program simulasi. Hasil yang diperoleh adalah metode Optimal merupakan metode yang paling optimal untuk merancang tapis FIR, frekuensi sampling yang tinggi dapat meningkatkan kinerja tapis, jumlah bit kuantisasi yang terbatas dapat menurunkan kinerja tapis dan semakin sempit transition width semakin besar jumlah koefisien tapis yang dibutuhkan.
Kata kunci : tapis FIR, perhitungan koefisien tapis, realisasi struktur
how to design the FIR filter from determination specification, calculation of filter coefficient, structure realization and the calculation of wordlength effect.
Program will calculate the filter coefficient from input specification and represented by a fixed number of bit (quantization). Calculation of FIR filter coefficient uses Window method and Optimal method. Filter coefficient that have been quantized then realized in the form of structure, it is use to realize FIR filter which one is transversal structure and linear phase structure. From the filter which has been realized in the form of the structure then program calculated finite wordlength effect that consist of coefficient quantization errors and roundoff erorrs.
Simulation program for realization of structure FIR filter implementation was implemented and tested to observe filter performance. Filter performance observed from the curve of response frequency that representing output of simulation program. The result are the Optimal method which is the optimum method to design FIR filter, high sampling frequency increase performance of filter, limited number of quantization bit decrease performance of filter and the narrower the transition width required more filter coefficient.
Keyword: FIR filter, calculation of filter coefficient, structure realization
Anugerah-Nya penulis akhirnya dapat menyelesaikan tugas akhir ini dengan baik dan
lancar.
Dalam proses penulisan tugas akhir ini penulis menyadari bahwa ada begitu
banyak pihak yang telah memberikan perhatian dan bantuan dengan caranya
masing-masing sehingga tugas akhir ini dapat terselesaikan. Oleh karena itu penulis ingin
mengucapkan terima kasih antara lain kepada :
1. Tuhan Yesus atas penyertaan dan bimbingannya.
2. Bapak Ir. Greg. Heliarko, SJ., B.ST., MA., M.Sc, selaku dekan fakultas teknik.
3. Bapak Damar Wijaya, S.T., M.T., selaku pembimbing atas bimbingan,
dukungan, saran dan kesabaran bagi penulis dari awal sampai tugas akhir ini bisa
selesai.
4. Bapak Bayu Primawan, S.T., M.Eng., Martanto, S.T., M.T., dan Ir. Iswanjono,
M.T., selaku penguji yang telah bersedia memberikan kritik dan saran.
5. Seluruh dosen teknik elektro atas ilmu yang telah diberikan selama penulis
menimba ilmu di Universitas Sanata Dharma.
6. Papah dan Mamah tercinta atas semangat, doa serta dukungan secara moril
maupun materiil.
7. Kedua saudaraku, Bafo dan Tiffany atas dukungan, cinta, bantuan yang sangat
berguna.
8. Lina yang selalu ada dan menemani disaat kebosanan melanda.
9. Dhika atas koreksi abstract yang sangat membantu, thank’s...
Alex, Briatma, Erick Corro, Eko, Berlin, Antin, Vian dan Paulina serta
teman-teman angkatan 2001, 2002 dan 2003 yang selalu berbagi ilmu dan pengalaman
kuliah.
12.Teman-teman kost ku yang selalu memberikan saran-saran yang berguna.
13.Dan seluruh pihak yang telah ambil bagian dalam proses penulisan tugas akhir ini
yang terlalu banyak jika disebutkan satu-persatu.
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih jauh dari
sempurna, oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini
sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua
pihak. Terima kasih.
Yogyakarta, Maret 2007
Penulis
JUDUL……….i
HALAMAN PERSETUJUAN………..iii
HALAMAN PENGESAHAN……….…...iv
HALAMAN PERNYATAAN KEASLIAN KARYA………...v
HALAMAN PERSEMBAHAN………vi
HALAMAN MOTTO………...vii
INTISARI……….viii
ABSTRACT………ix
KATA PENGANTAR……….x
DAFTAR ISI……….xii
DAFTAR GAMBAR……….xv
DAFTAR TABEL………....xix
DAFTAR CONTOH……….xx
BAB I. PENDAHULUAN 1.1. Latar Belakang Masalah………1
1.2. Tujuan dan Manfaat Penelitian………..2
1.3. Batasan Masalah………2
1.4. Metodologi Penelitian………..………..3
1.5. Sistematika Penulisan………....3
BAB II. DASAR TEORI 2.1. Transformasi-Z………...5
2.2. Invers Transformasi-Z...8
2.3. Sifat-sifat Transformasi-Z...………...8
2.4. Karakteristik Tapis FIR...……….10
2.4.1. Tanggapan Impuls dan Tanggapan Frekuensi Tapis FIR....10
2.4.2. Lokasi Zero Tapis FIR...18
2.5. Langkah-langkah Perancangan Tapis FIR...………21
2.6. Spesifikasi Tapis FIR...………22
2.9. Realisasi Struktur Tapis FIR………....44
2.9.1. Transversal Structure...44
2.9.2. Linear Phase Structure...45
2.10.Finite Wordlength Effect Pada Tapis FIR.………...47
2.10.1.Coefficient Quantization Errors…...………...48
2.10.2.Roundoff Errors………...49
2.11.Program Aplikasi MATLAB®……….50
BAB III. PERANCANGAN PROGRAM SIMULASI UNTUK REALISASI TAPIS FINITE IMPULSE RESPONSE 3.1. Algoritma Program...………53
3.2. Perancangan Program Simulasi Untuk Realisasi Struktur Tapis FIR...……..54
3.2.1. Proses Pemeriksaan Masukan...54
3.2.2. Proses Perhitungan Koefisien tapis...57
3.2.2.1. Fungsi-fungsi Metode Jendela...58
3.2.2.2. Fungsi Metode Optimal...61
3.2.3. Proses Realisasi Tapis FIR Dalam Bentuk Struktur...63
3.2.3.1. Kuantisasi Koefisien...65
3.2.3.2. Koefisien Linear Phase Structure...68
3.2.3.3. Struktur Linear Phase...69
3.2.3.4. Masukkan Data Ke Transversal Structure...71
3.2.3.5. Masukkan Data Ke Linear Phase Structure…….75
3.2.4. Proses Perhitungan Finite Wordlength Effect……….75
3.2.4.1. Perhitungan Coefficient Quantization Errors…...78
3.2.4.2. Perhitungan Roundoff Errors………78
3.3. Layout Program.………..79
BAB IV. HASIL DAN PEMBAHASAN 4.1. Halaman Utama...………...84
4.2.3. Tapis Bandpass...93
4.3. Hubungan Antara Sampling Frequency dengan Kinerja Tapis...97
4.4. Hubungan Antara Jumlah Bit Kuantisasi Koefisien Tapis dengan
Kinerja Tapis...102
4.5. Hubungan Antara Transition Width dengan Jumlah Koefisien Tapis
Hasil Perancangan...106
BAB V. PENUTUP
Kesimpulan………...……….108
DAFTAR PUSTAKA
LAMPIRAN
Gambar 2.1 Runtun waktu diskrit...………...6
Gambar 2.2 Region of convergence ………...8
Gambar 2.3 Ilustrasi empat jenis tanggapan impuls ………..12
Gambar 2.4 Contoh lokasi zero pada tapis FIR ...………19
Gambar 2.5 Unit circle pada bidang komplek ………...…………21
Gambar 2.6 Spesifikasi tanggapan frekuensi untuk tapis lowpass dengan ripple yang seragam pada passband dan stopband ……..………...22
Gambar 2.7 Spesifikasi tanggapan frekuensi untuk tapis lowpass dengan ripple yang tidak seragam pada passband dan stopband ……..…...23
Gambar 2.8 Tanggapan frekuensi ideal dari tiga jenis tapis ………...…...25
Gambar 2.9 Tanggapan amplitude yang diharapkan ...………33
Gambar 2.10 Tanggapan frekuensi tapis optimal ...………...40
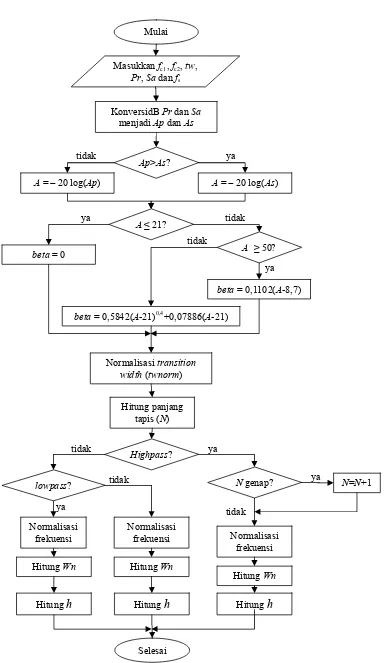
Gambar 2.11 Diagram alir sederhana dari metode optimal ………...……..43
Gambar 2.12 Transversal structure ...………....44
Gambar 2.13 Linear phase structure untuk tapis FIR dengan tanggapan impuls yang simetri ………...…….47
Gambar 2.14 Linear phase structure untuk tapis FIR dengan tanggapan impuls yang tidak simetri ...………...…...47
Gambar 2.15 Ilustrasi dari efek kuantisasi koefisien ………...…49
Gambar 3.1 Algoritma perancangan program simulasi untuk realisasi struktur tapis FIR …...53
hanning window, hamming window dan blackman window ……….59
Gambar 3.5 Diagram alir proses perhitungan koefisien tapis dengan menggunakan kaiser window ………...…….60
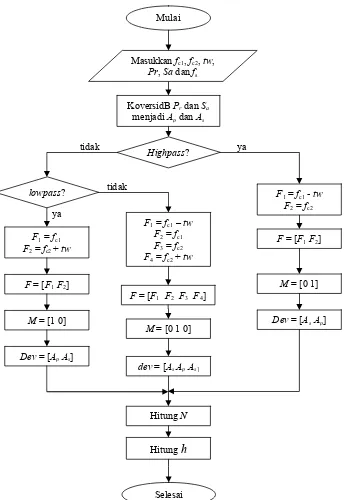
Gambar 3.6 Diagram alir proses perhitungan koefisien tapis dengan menggunakan metode optimal …...…………62
Gambar 3.7 Diagram alir proses realisasi struktur tapis ………65
Gambar 3.8 Diagram alir kuantisasi koefisien ……...67
Gambar 3.9 Diagram alir perhitungan koefisien linear phase structure ……...68
Gambar 3.10 Diagram alir pembuatan linear phase structure ………...71
Gambar 3.11 Diagram alir proses memasukkan masukan ke transversal structure ………...73
Gambar 3.12 Diagram alir proses memasukkan masukan ke linear phase structure bagian I ………...76
Gambar 3.13 Diagram alir proses memasukkan masukan ke linear phase structure bagian II ……….77
Gambar 3.14 Diagram alir perhitungan finite wordlength effect ……….77
Gambar 3.15 Diagram alir perhitungan errors ………79
Gambar 3.16 Layout program ………...………...80
Gambar 3.17 Tampilan window untuk menampilkan gambar struktur tapis….…...83
Gambar 4.1 Tampilan halaman pembuka program ...……….…84
Gambar 4.2 Tampilan program utama...85
jendelamenggunakan hanning window.……...87 Gambar 4.6 Tampilan struktur tapis yang digunakan untuk merancang
tapis lowpass...88 Gambar 4.7 Tampilan hasil perancangan tapis lowpass dengan metode jendela
dan metode optimal...88
Gambar 4.8 Tampilan hasil perancangan tapis highpass dengan metode jendela menggunakan hamming window……….………...91 Gambar 4.9 Tampilan hasil perancangan tapis highpass dengan metode jendela
dan metode optimal...91
Gambar 4.10 Tampilan hasil perancangan tapis bandpass dengan metode jendela menggunakan kaiser window...94 Gambar 4.11 Tampilan struktur tapis yang digunakan untuk merancang
tapis bandpass...95 Gambar 4.12 Tampilan hasil perancangan tapis bandpass dengan metode jendela
dan metode optimal...………...95
Gambar 4.13 Grafik hubungan antara masukan sampling frequency dengan
galat pada cut-off frequency………....98 Gambar 4.14 Grafik hubungan antara masukan sampling frequency dengan
galat pada passband ripple...99 Gambar 4.15 Grafik hubungan antara masukan sampling frequency dengan
galat pada stopband attenuation...100
dengan galat pada cut-off frequency...103 Gambar 4.18 Grafik hubungan antara jumlah bit kuantisasi koefisien tapis
dengan galat pada passband ripple...104 Gambar 4.19 Grafik hubungan antara jumlah bit kuantisasi koefisien tapis
dengan galat pada stopband attenuation...104 Gambar 4.20 Grafik hubungan antara jumlah bit kuantisasi koefisien tapis
dengan galat pada transition width...105 Gambar 4.21 Grafik hubungan antara transition width dengan jumlah koefisien
tapis hasil perancangan...107
Tabel 2.1 Tanggapan impuls ideal beberapa jenis tapis…..………….……….25
Tabel 2.2 Karakteristik beberapa fungsi jendela………..……….30
Tabel 4.1 Spesifikasi yang diharapkan pada perancangan tapis lowpass...87
Tabel 4.2 Spesifikasi aktual hasil perancangan tapis lowpass...89
Tabel 4.3 Spesifikasi yang diharapkan pada perancangan tapis highpass...90
Tabel 4.4 Spesifikasi aktual hasil perancangan tapis highpass...92
Tabel 4.5 Spesifikasi yang diharapkan pada perancangan tapis bandpass...93
Tabel 4.6 Spesifikasi aktual hasil perancangan tapis bandpass...96
Tabel 4.7 Spesifikasi yang diharapkan pada perancangan tapis untuk memperoleh hubungan antara masukkan sampling frequency dengan kinerja tapis....97
Tabel 4.8 Spesifikasi yang diharapkan pada perancangan tapis untuk memperoleh hubungan antara jumlah bit kuantisasi koefisien tapis dengan kinerja tapis...102
Tabel 4.9 Spesifikasi yang diharapkan pada perancangan tapis untuk memperoleh hubungan antara masukan transition width dengan jumlah koefisien tapis...106
Contoh 2.1 Transformasi-Z...…..…………..………...6
Contoh 2.2 Tanggapan impuls simetri dengan N ganjil …...……….………….13
Contoh 2.3 Tanggapan impuls simetri dengan N genap....…...…….………….14
Contoh 2.4 Tanggapan impuls tidak simetri dengan N ganjil...……...……….….16
Contoh 2.5 Tanggapan impuls tidak simetri dengan N genap...…….….….17
Contoh 3.1 Kuantisasi Koefisien...….….….….66
Contoh 3.2 Struktur linear phase...……..….….69
Contoh 3.3 Masukkan data ke transversal structure...……..….….72
1.1 Latar Belakang Masalah
Perkembangan dibidang elektronika telah melahirkan penemuan-penemuan
baru. Aplikasinya telah memenuhi berbagai sektor kehidupan, antara lain sektor
audio, video, sistem kontrol dan sebagainya. Semua kegiatan tersebut tidak dapat
dipisahkan dengan masalah pengolahan sinyal. Jika masalah sinyal dikaitkan dengan
sistem yang ada, maka pengolahan sinyal bertugas untuk menerima masukan yang
ada dan selanjutnya mengolah atau memproses kemudian mengeluarkan hasilnya.
Tapis digital merupakan salah satu piranti untuk mengolah sinyal digital. Tapis
digunakan untuk proses pengolahan sinyal yaitu penapisan (filtering), penghalusan (smoothing) dan prediksi (prediction). Berdasarkan tanggapan impulsnya tapis digital dibedakan menjadi tapis digital tanggapan impuls berhingga (finite impulse respons, FIR) dan tapis digital tanggapan impuls tak berhingga (infinite impulse response, IIR).
Perancangan struktur tapis FIR merupakan salah satu pokok bahasan pada mata
kuliah pengolahan sinyal digital. Karena belum banyak program simulasi mengenai
perancangan struktur tapis FIR, maka untuk membantu mahasiswa dalam memahami
pokok bahasan tersebut, tugas akhir ini akan memfokuskan diri pada perancangan
program simulasi untuk realisasi struktur tapis FIR.
1.2 Tujuan dan Manfaat Penelitian
Tujuan yang ingin dicapai dari penelitian ini adalah membuat program bantu
yang berfungsi untuk merealisasikan struktur tapis finite impulse response.
Beberapa manfaat yang diharapkan dapat diperoleh dari penelitian ini adalah
sebagai berikut :
1. Membantu para dosen pengampu mata kuliah pengolahan sinyal digital
dalam menjelaskan realisasi struktur tapis FIR dengan lebih menarik.
2. Membantu mahasiswa untuk memahami dan merancang struktur tapis finite impulse response.
3. Sebagai referensi yang dapat mendukung penelitian selanjutnya yang
berkaitan dengan perancangan struktur tapis finite impulse response.
1.3 Batasan Masalah
Pada penelitian ini dilakukan pembatasan masalah terhadap program simulasi
yang akan dibuat. Batasan masalah penelitian ini adalah sebagai berikut :
1. Program simulasi dibuat menggunakan MATLAB.
2. Input program adalah cut-off frequency, transition width, passband ripple,
stopband attenuation dan sampling frequency.
3. Perhitungan nilai koefisien fungsi alih tapis menggunakan metode jendela
(window method) dan metode optimal (optimal method).
5. Struktur tapis yang digunakan terdiri dari transversal structure dan linear phase structure.
6. Finite wordlength effects yang dihitung adalah coefficient quantization errors
dan roundoff errors.
1.4 Metodologi Penelitian
Langkah-langkah yang digunakan untuk menyusun tugas akhir ini adalah
sebagai berikut :
1. Studi pustaka yang berhubungan dengan realisasi struktur tapis FIR.
2. Membuat perangkat lunak, yaitu program simulasi untuk realisasi struktur
tapis FIR.
3. Menguji program simulasi yang telah dibuat.
4. Membahas dan menganalisis hasil rancangan yang diperoleh dari program
simulasi untuk realisasi struktur tapis FIR.
5. Membuat kesimpulan dari hasil pembahasan dan analisis.
1.5 Sistematika Penulisan
Sistematika penulisan pada penulisan tugas akhir ini adalah sebagai berikut :
BAB I : Berisi latar belakang, perumusan masalah, batasan masalah, tujuan
dan manfaat penelitian, metodologi penelitian dan sistematika
penulisan tugas akhir.
BAB II : Berisi teori-teori yang mendasari penulisan tugas akhir ini.
program simulasi untuk realisasi struktur tapis FIR.
BAB IV : Berisi hasil simulasi dan pembahasan dari program simulasi untuk
realisasi struktur tapis FIR.
BAB V : Berisi kesimpulan dari hasil penelitian dan saran yang mungkin
Tapis finite impulse response, FIR, memiliki berbagai kelebihan yang membuatnya sangat berguna untuk bermacam-macam aplikasi dalam pemrosesan
sinyal digital. Beberapa kelebihan tapis FIR adalah sebagai berikut [1]
1. Tanggapan fase linear, hal ini disebabkan tanggapan impuls tapis FIR yang
simetri.
2. Selalu lebih stabil, karena semua pole berada pada origin.
3. Dapat direalisasikan dalam bentuk piranti keras secara efisien.
Struktur tapis FIR juga sederhana dan mudah untuk diimplementasikan.
Kekurangan pada tapis FIR adalah kebutuhan perkalian yang banyak untuk
tanggapan frekuensi yang diberikan, sehingga memberikan tunda proses yang lama
bagi masukan untuk mencapai keluaran.
2.1 Transformasi-Z
Transformasi-Z dari suatu runtun, x
( )
n , untuk semua , didefinisikan dengan n
( )
∑
( )
(2.1) ∞∞ −
−
= n
z n x z
X
dengan z adalah variabel komplek [2].
Pada sistem kausal, x
( )
n tidak bernilai nol hanya pada interval 0<n<∞,sehingga persamaan (2.1) bisa disederhanakan menjadi
( )
∑
( )
(2.2) ∞=
− =
0 n
n
z n x z
X
Persamaan (2.2) disebut transformasi-Z satu sisi.
Transformasi-Z merupakan suatu runtun dengan panjang yang tidak berhingga, dan
tidak konvergen untuk semua nilai . Daerah dimana transformasi-Z konvergen
(memiliki nilai tertentu) disebut sebagai region of convergence (ROC), dan pada
bagian ini nilai berhingga. ROC ditentukan oleh sifat dari . Pencarian ROC
ditunjukkan pada Contoh 2.1.
z
( )
zX x
( )
n
Penyelesaian
Runtun waktu diskrit pada Gambar 2.1 dapat didefinisikan secara
matematis
( )
0 0
0 1
< =
∞ ≤ ≤ =
n n n
x
Gambar 2.1 Runtun waktu diskrit [2].
Tentukan transformasi-Z dan region of convergence untuk runtun
jelaslah bahwa ini merupakan runtun kausal tak berhingga. Dari
persamaan (2.1), transformasi-Z dari runtun waktu diskrit pada Gambar
2.1 adalah
( )
( )
... 1 2 1 0 + + + = = = − − ∞ = − ∞ −∞ = −∑
∑
z z z z n x z X n n n nSistem akan konvergen jika z−1 <1 atau z >1. dapat
diekspresikan dalam bentuk tertutup
( )
z X( )
1 1 1 ... 1 1 2 1 − = − = + + + = − − − z z z z z z XJika (di luar unit circle), maka dengan menggunakan persamaan
(2.3) 2 = z
( )
( ) ( )
21 2 2 ... 2 1 2 1 2 1
1 2 3 =
− = + + + + = z X Jika 2 1 =
z (di dalam unit circle), maka dengan menggunakan
persamaan (2.3)
X
( )
z =1+10.5+(
10.5) (
2 + 10.5)
3 +...=1+2+4+8+....Dari contoh di atas terlihat bahwa X
( )
z akan konvergen jika z beradadi luar unit circle, dan akan divergen jika z berada di dalam unit circle.
Gambar 2.2 menunjukkan ROC dari runtun pada Gambar 2.1.
Gambar 2.2 Region of convergence [2].
2.2 Invers Transformasi-Z
Invers tansformasi-Z (IZT) berguna untuk mengembalikan runtun waktu
diskrit . IZT umumnya digunakan pada pemrosesan sinyal digital, sebagai contoh
pada penggunaan untuk mencari tanggapan impuls dari tapis digital. Invers
transformasi-Z didefinisikan dengan
( )
n xx
( )
n =Z−1[
X( )
z]
(2.4)dengan X
( )
z adalah transformasi-Z darix( )
n dan −1Z adalah simbol dari invers
transformasi-Z.
2.3 Sifat-sifat Transformasi-Z
Beberapa sifat dari transformasi-Z adalah sebagai berikut
1. Linearity. Jika runtunx1
( )
n dan x2( )
n mempunyai transformasi-Z dan, maka transformasi-Z dari kombinasi linearnya adalah
( )
z X1ax1
( )
n +bx1( )
n →aX1( )
z +bX2( )
z (2.6)2. Delay atau shift. Jika tansformasi-Z dari x
( )
n adalah , makatransformasi-Z dari
( )
z X( )
nx yang tertunda sebesar m adalah z−mX
( )
z atau
( )
( )
(
n m)
z X(
z xz X n x
m − → −
→
)
3. Convolution. Sistem LTI (linear time-Invariant) diskret dengan input x
( )
ndan tanggapan impuls h
( )
k menghasilkan output
( )
∑
( ) (
)
(2.7)∞
−∞ =
− =
k
k n x k h n
y
Dalam bentuk transformasi-Z, input dan output memiliki hubungan
Y
( )
z =H( ) ( )
z X z (2.8)dengan X
( )
z , H( )
z dan Y( )
z adalah bentuk transformasi-Z darix( )
n , h( )
kdan y
( )
n .
4. Differentiation. Jika X
( )
z adalah transformasi-Z dari , makatransformasi-Z dari
( )
n x( )
nnx diperoleh dengan diferensiasi X
( )
z :
( )
( )
( )
( )
z z X z n nx
z X n x
d d − → →
Sifat ini digunakan untuk memperoleh invers tansformasi-Z jika X
( )
zmemiliki orde pole yang banyak.
2.4 Karakteristik Tapis FIR
Pada bagian ini akan dibahas bentuk tanggapan impuls dan tanggapan
frekuensi tapis FIR, serta lokasi zero tapis FIR.
2.4.1 Tanggapan Impuls dan Tanggapan Frekuensi Tapis FIR
Jika adalah tanggapan impuls tapis dengan panjang N, maka fungsi
sistem dapat dinyatakan dengan
( )
n h
( )
( )
,0 1 (2.10)1
0
− ≤ ≤ =
∑
−=
−
N n z
n h z
H
N
n
n
yang memiliki pole sebanyak N−1 pada titik asal z = 0, dan zero sebanyak N−1
pada sembarang tempat di bidang Z (Z-plane) [3]. Fungsi tanggapan frekuensi
( )
jωe
H , dapat dinyatakan sebagai
( )
ω =∑
( )
ω −π ≤ω≤π (2.11) −=
−
, 1
0 N
n
n j j
e n h e
H
Tunda fase sistem yang diberikan adalah negatif dari sudut fase dibagi frekuensi,
yaitu
( )
ωω θ − = p
Suatu tapis dikatakan memiliki tanggapan fase yang linear jika tanggapan
fasenya memenuhi satu dari hubungan berikut
θ
( )
ω =−αω (2.13)atau
θ
( )
ω =β −αω (2.14)dengan
(
)
2 1 − = N
α dan
2 π β =± .
Agar θ
( )
ω =−αω terpenuhi, maka tanggapan impuls tapis harus memilikisimetri positif, yaitu
( ) (
)
(
)
(
)
( )
(
)
⎪⎩ ⎪ ⎨ ⎧ = − = − − = genap N N n ganjil N N n n N h n h 2 ..., , 1 , 0 2 1 ..., , 1 , 01 (2.15)
Jika N ganjil, α merupakan suatu bilangan bulat dan ini disebut sebagai tapis FIR tipe 1. Sebaliknya, jika N genap, α bukan merupakan bilangan bulat
dan ini disebut tapis FIR tipe 2.
Untuk tanggapan fase yang memenuhi hubungan θ
( )
ω =β −αω, αbukanlah merupakan tetapan tunda fase, tetapi
( )
α ω ω θ =− d d (2.16)adalah tetapan yang merupakan tunda grup. Untuk jenis ini, tanggapan impuls
( )
(
)
(
)
2
2 1
1
π β α
± =
− =
− − − =
N n N h n h
(2.17)
Gambar 2.3 Ilustrasi empat jenis tanggapan impuls [4].
Sehingga ada dua tipe lagi yang mungkin, yaitu untuk N ganjil dan untuk N
genap, yang disebut tapis FIR tipe 3 dan tipe 4.
Ketika kasus simetri dan asimetri digabungkan bersama N ganjil dan N
genap, akan didapat empat jenis tapis FIR. Keempatnya ditunjukkan pada
Tipe 1 : Tanggapan impuls simetri dengan N ganjil
Pada kasus ini panjang tapis (N) berjumlah ganjil [4]. Pencarian tanggapan
frekuensi untuk tapis FIR tipe 1 ditunjukkan pada Contoh 2.2.
Contoh 2.2
N = 9. Dengan menggunakan persamaan (2.10) didapatkan fungsi
alih tapis yaitu sebagai berikut
( ) ( ) ( )
( )
( )
( )
5( )
6( )
1( )
8 4 3 2 1 8 7 6 5 4 3 ) 2 ( 1 0 − − − − − − − − + + + + + + + + = z h z h z h z h z h z h z h z h h z HDengan menggunakan persamaan (2.15) untuk N = 9,
( ) ( )
0 h8,h = h
( ) ( )
1 =h 7, h( ) ( )
2 =h6, h( ) (
3 =h5)
. Maka persamaan (2.18) menjadi( ) ( )
(
)
( )
(
)
( )
(
)
( )
(
)
( )
( )
(
)
( )
(
)
( )
(
)
( )
(
)
( )
( )
(
)
( )
(
)
( )
(
)
( )
3(
)
( )
4] 2 1 0 [ 4 3 2 1 0 4 3 2 1 1 0 1 2 2 3 3 4 4 4 4 1 4 2 2 4 3 3 4 4 4 4 4 5 3 6 2 7 1 8 h z z h z z h z z h z z h z z h z z z h z z z h z z z h z z z h z h z z h z z h z z h z h z H + + + + + + + + = + + + + + + + + = + + + + + + + + = − − − − − − − − − − − − − − − − − − − − − −Tanggapan frekuensi yang sesuai untuk persamaan (2.19) adalah
( )
( ) ( )
( ) ( )
( ) (
( ) ( ) ( )
3 cos 4] 2 2 cos 2 2 3 cos 1 2 4 cos 0 2 [ 4 h h h h h e eH j j
(2.22)
Jika dimisalkan a
( ) ( )
0 =h 4 dan a( )
n =2h(
4−n)
, untuk , maka 4 , 3 , 2 , 1 =n H
( )
ejω dapat dituliskan dalam bentuk( )
ω 4( ) ( )
ω 4ω0 cos j n j e n n a e H − =
∑
= (2.21)
Dari persamaan (2.21) didapat persamaan umum tanggapan frekuensi untuk
tapis FIR tipe 1, yaitu
( )
( )( )
( )
( )
n n a e e H N n N jjω ω ω
cos 2 1 0 2 1
∑
− = − − =dengan
( )
⎟⎠ ⎞ ⎜ ⎝ ⎛ − = 2 1
0 h N
a
( )
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = h N n na
2 1 2
Tipe 2 : Tanggapan impuls simetri dengan N genap
Pada kasus ini panjang tapis (N) berjumlah genap. Pencarian tanggapan
frekuensi untuk tapis FIR tipe 2 ditunjukkan pada Contoh 2.3.
Contoh 2.3
N = 8. Dengan menggunakan koefisien tanggapan impuls yang simetri dari persamaan (2.10), maka fungsi alih dari tapis FIR
dapat dituliskan sebagai berikut
( ) ( )
(
)
( )
(
)
( )
(
)
( )
(
)
( )
(
)
( )
(
)
( )
(
)
( )
3(
)
]
Fungsi tanggapan frekuensi dari persamaan (2.23) adalah
( )
( )
( )
( )
( )
⎥ ⎦ ⎤ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = − 2 2 3 2 5 2 7 cos 3 2 cos 2 2 cos 1 2 cos 0 2 2 7 ω ω ω ω ω ω h h h h e eH j j
Jika dimisalkan b
( )
n =2h(
4−n)
, untuk n=1,2,3,4, maka( )
jωe
H dapat dituliskan dalam bentuk
( )
( )
[
(
)
]
2 1 cos 4 1 2 7 − =∑
= − n n b e e H n jjω ω ω (2.25)
(2.24)
Dari persamaan (2.25) didapat persamaan umum tanggapan frekuensi untuk
tapis FIR tipe 2, yaitu
( )
( )( )
[
(
)
]
2 1 cos 2 1 2 1 − =∑
= − − n n b e e H N n N jjω ω ω
(2.26)
dengan
( )
⎟⎠ ⎞ ⎜
⎝ ⎛ − = h N n n
b
2
2 .
Tipe 3 : Tanggapan impuls tidak simetri dengan N ganjil
Pada kasus ini panjang tapis (N) berjumlah ganjil. Pencarian tanggapan
Contoh 2.4
N = 9. Dengan menggunakan persamaan (2.11) didapatkan fungsi tanggapan frekuensi tapis yaitu sebagai berikut
( )
( )
( ) ( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( ) ( )
( )
( )
( )
8 ] 7 6 5 4 3 2 1 0 [ 8 7 6 5 4 3 2 1 0 4 3 2 2 3 4 4 8 7 6 5 4 3 2 8 0 ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω j j j j j j j j j j j j j j j j j n n j j e h e h e h e h h e h e h e h e h e e h e h e h e h e h e h e h e h h e n h e H − − − − − − − − − − − − − = − + + + + + + + + = + + + + + + + + = =∑
Dengan menggunakan persamaan (2.17) untuk N = 9,
( )
0 h( )
8,h =− h
( )
1 =−h( )
7, h( )
2 =−h( )
6, h( )
3 =−h(
5(2.27)
)
, maka persamaan (2.27) menjadi( )
( )
(
)
( )
(
)
( )
2(
)
( )
3(
)
( )
4] 1 0 [ 2 2 3 3 4 4 4 h e e h e e h e e h e e h e e H j j j j j j j j j j + − + − + − + − = − − − − − ω ω ω ω ω ω ω ω ω ω (2.28)Pada Gambar 2.3(c) terlihat bahwa nilai . Dengan
menggunakan
( )
4 =0h
(
ω ω)
π( )
ωm e
e
ejm − −jm =2 j 2sin , maka tanggapan
frekuensi tapis adalah sebagai berikut
( )
( ) ( )
( ) ( )
( ) ( )
2 sin 2 2( ) ( )
3 sin ] 2 3 sin 1 2 4 sin 0 2 [ 2 4 ω ω ω ω π ω ω h h h h e e eH j j j
Dari persamaan (2.29) didapat persamaan umum tanggapan frekuensi untuk
tapis FIR tipe 3, yaitu
( )
( )
( )
( )
( )
n n a e e H N n N j j ω π ωω 1 2 sin
1 2 2 1
∑
− = ⎥⎦ ⎤ ⎢⎣ ⎡ − − − = (2.30)dengan
( )
⎟⎠ ⎞ ⎜
⎝
⎛ − − = h N n n
a
2 1 2
Tipe 4 : Tanggapan impuls tidak simetri dengan N genap
Pada kasus ini panjang tapis (N) berjumlah genap. Pencarian tanggapan
frekuensi untuk tapis FIR tipe 2 ditunjukkan pada Contoh 2.5.
Contoh 2.5
N = 8. Dengan menggunakan persamaan (2.11) didapatkan fungsi tanggapan frekuensi tapis yaitu sebagai berikut
( )
( )
( ) ( )
( )
( )
( )
( )
ω( )
ω( )
ω ω ω ω ω ω ω 7 6 5 4 3 2 7 0 7 6 5 4 3 2 1 0 j j j j j j j n n j j e h e h e h e h e h e h e h h e n h e H − − − − − − − = − + + + + + + + = =∑
(2.31)Dengan menggunakan persamaan (2.17) untuk N = 8,
( )
0 h( )
7,h =− h
( )
1 =−h( )
6, h( )
2 =−h( )
5, h( )
3 =−h(
4)
, maka persamaan (2.31) menjadi
( )
( )
(
)
( )
(
)
( )
2(
)
( )
3(
)
](2.33)
( )
( )
( )
( )
( )
( )
( )
( )
( )
] 2 sin 3 2 2 3 sin 2 2 2 5 sin 1 2 2 7 sin 0 2 [ 2 2 / 7 ω ω ω ω π ω ω h h h h e e eH j j j
+ +
+ = −
dengan
(
ejmω −e−jmω)
=2ejπ2sin( )
mω , maka tanggapan frekuensi tapis menjadiDari persamaan (2.33) didapat persamaan umum tanggapan frekuensi untuk
tapis FIR tipe 4, yaitu
( )
( )
( )
sin(
(
12)
)
2 1 2 2 1 − =∑
= ⎥⎦ ⎤ ⎢⎣ ⎡ − − − n n b e e H N n N j j ω π ω ω (2.34)dengan
( )
⎟⎠ ⎞ ⎜
⎝ ⎛ − = h N n n
b
2
2 .
2.4.2 Lokasi Zero Tapis FIR
Tiap tipe tapis FIR memiliki batasan dalam merancang tiap jenis tapis,
batasan itu dapat diketahui dengan melihat lokasi zero pada bidang-z. Untuk tapis
FIR, terdapat (N−1) pole pada titik asal dan (N−1) zero yang terletak sembarang
pada bidang Z.
Untuk tapis FIR fase linear, zero tersebut memiliki simetri tertentu karena
batasan simetri pada h
( )
n . Jika zero j i, maka zero terletak pada [5] ii re z = ω
1. Jika 0ri ≠1, ωi ≠ , maka zero berada pada z=rejω, ejω r z =1 ,
dan
ω
j e r
z= − e jω
2. Jika 0ri =1, ωi ≠ , maka zero berada pada z=rejω dan z =re−jω.
3. Jika 0ri ≠1, ωi = , atau π, maka zero adalah real dan berada pada
dan
ω
j e r
z= ejω
r z =1 .
4. Jika ,ri =1, ωi =0 atau π, maka zero terletak pada +1 atau -1 pada unit
circle.
Gambar 2.4 Contoh lokasi zero pada tapis FIR [4].
Gambar 2.4 menunjukan contoh lokasi zero dari empat tipe tapis FIR.
Perbedaan dari empat tipe tapis FIR adalah dari jumlah zero pada dan
[4]. Jumlah zero pada
1 = z 1
− =
z z =1 dan z=−1 dari tiap tipe tapis FIR adalah
1. Tapis FIR tipe 1 memiliki jumlah zero genap atau tidak memiliki zero
pada dan z =1 z =−1.
2. Tapis FIR tipe 2 memiliki jumlah zero genap atau tidak memiliki zero
pada , dan memiliki jumlah zero ganjil pada z =1 z =−1.
3. Tapis FIR tipe 3 memiliki jumlah zero ganjil pada z =1 dan z =−1.
4. Tapis FIR tipe 4 memiliki jumlah zero ganjil pada , dan juga
memiliki jumlah zero genap pada
1 = z 1
− = z .
Gambar 2.5 menunjukkan hubungan antara posisi zero dan ω pada
bidang-z. Kehadiran zero pada z =±1 menjadi batasan penggunaan tapis FIR
untuk merancangan tapis. Sebagai contoh, ketika tapis FIR tipe 2 selalu memiliki
zero pada z=−1, berarti tanggapan frekuensi pada ω =π selalu bernilai nol, sehingga jenis ini tidak dapat digunakan untuk merancang highpass filter (lihat
Gambar 2.7). Demikian juga tapis FIR tipe 4 yang memiliki zero pada z =1
tidak dapat digunakan untuk merancang lowpass filter karena tanggapan
frekuensi pada ω =0 selalu bernilai nol. Tapis FIR tipe 3 tidak dapat digunakan untuk merancang lowpass maupun highpass filter karena terdapat zero pada
dan . Sedangkan tipe 1 tapis FIR tidak memiliki batasan dan dapat
digunakan untuk merancang semua jenis tapis. 1
=
Gambar 2.5 Unit circle pada bidang komplek [6]. z-plane
Zero pada z=re−jω
r
2.5 Langkah-langkah Perancangan Tapis FIR
Perancangan tapis FIR terdiri dari lima langkah, yaitu sebagai berikut [2]
(1) Menentukan spesifikasi tapis, seperti frekuensi cutoff, passband ripple, stopband attenuation, lebar bidang transisi dan frekuensi sampling.
(2) Menghitung koefisien tapis. Pada langkah ini, koefisien dari fungsi
transfer, , yang memenuhi spesifikasi yang diberikan pada langkah
(1) dihitung.
( )
z H(3) Realisasi struktur tapis, yaitu mengubah fungsi transfer yang diperoleh
pada langkah (2) ke bentuk struktur tapis yang sesuai.
(4) Analisa finite wordlenght effect. Pada bagian ini, efek dari
mengkuantisasikan koefisien tapis dan data masukan seperti halnya efek
yang terjadi jika jumlah bit untuk menyatakan koefisien terbatas dianalisa.
(5) Implementasi tapis. Bagian ini meliputi pembuatan kode software dan atau
pembuatan hardware untuk mengimplementasikan tapis yang sesuai
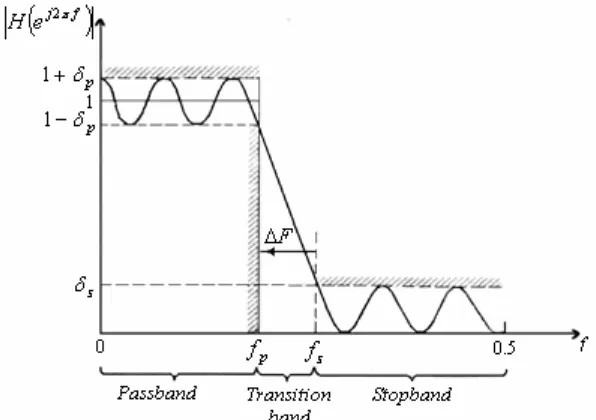
2.6 Spesifikasi Tapis FIR
Gambar 2.6 memperlihatkan spesifikasi tanggapan frekuensi tapis lowpass
dengan ripple yang seragam pada passband dan stopband. Spesifikasi ini digunakan
untuk merancang tapis dengan metode optimal. Mengacu pada Gambar 2.6,
parameter yang diperlukan adalah
p
δ passband ripple
s
δ stopband attenuation
p
f passband edge frequency
s
f stopband edge frequency
s
F frekuensi sampling
Biasanya δp dan δs diekspresikan dalam bentuk desibel. Jarak diantara dan
disebut transition width tapis. Parameter penting yang lain adalah panjang tapis (filter length), N, yang menunjukkan jumlah koefisien tapis. Parameter diatas juga digunakan pada tapis highpass dan bandpass.
p
f fs
Gambar 2.7 memperlihatkan spesifikasi tanggapan frekuensi tapis lowpass
dengan ripple yang tidak seragam pada passband dan stopband. Spesifikasi ini
digunakan untuk merancang tapis dengan metode jendela. Mengacu pada Gambar
2.7, parameter yang diperlukan adalah
p
δ passband ripple
s
δ stopband attenuation
c
f cutoff frequency
s
f stopband edge frequency
s
F frekuensi sampling
Cutoff frequency adalah frekuensi saat daya keluaran tapis berkurang sampai setengah kali daya pada passband yaitu pada -3 desibel. Hal ini ekuivalen dengan
amplitude yang berkurang 70.7% dari amplitude pada passband [7]. Jarak diantara dan disebut transition width tapis.
c
f fs
Normalisasi frekuensi
Normalisasi frekuensi adalah proses membagi suatu nilai frekuensi dengan
nilai frekuensi sampling. Pada tapis digital, normalisasi frekuensi dilakukan pada
frekuensi cutoff dan transition width.
2.7 Metode Perancangan Tapis FIR
2.7.1 Metode Jendela (Window Method)
Ide dasar dalam perancangan jendela adalah memilih tapis frekuensi
terpilih ideal yang tepat (tanggapan impuls durasi tak hingga) dan memotong
tanggapan impuls untuk mendapatkan sebuah tapis FIR yang memiliki fase linear
[3]. Oleh karena itu penekanan pada metode ini adalah pada pemilihan sebuah
fungsi penjendelaan (windowing) yang tepat dan sebuah tapis ideal yang tepat.
Tapis frekuensi terpilih ideal yang dinyatakan dengan Hd
( )
ejω , memilikisuatu perolehan magnitude satuan dan karakteristik fase linear pada passband,
dan tanggapan nol pada stopband [2]. Sebuah tapis pelewat rendah (lowpass
filter) ideal dengan lebar bidang ωc<π diberikan oleh
( )
⎪⎩ ⎪ ⎨ ⎧≤ < ≤
π ω ω
ω ω
ω
c c j
d e H
, 0
, 1
(2.35)
Dengan ωc adalah frekuensi cutoff . Tanggapan impuls tapis ini berdurasi tak
( )
( )
(
)
(
)
0 , 2 0 , sin 2 sin 2 1 2 1 = = = ≠ = = = =∫
∫
− − n f n n n f n n d e d e H n h c c c c c c n j n j d d c c π ω ω ω π ω ω π ω ω π ω ω ω ω π π (2.36)Tanggapan frekuensi ideal ditunjukan pada Gambar 2.8, sedangkan
tanggapan impuls ideal untuk beberapa jenis tapis dapat dilihat pada tabel 2.1.
Gambar 2.8 Tanggapanfrekuensi ideal dari tiga jenis tapis: (a) lowpass filter ideal, (b) highpass filter ideal, dan (c) bandpass filter ideal [5].
Tabel 2.1 Tanggapan impuls ideal beberapa jenis tapis [8].
Tanggapan impuls ideal, hd
( )
nJenis Tapis
( )
2
, n N
n
hd ≠
( )
2 N hd
Lowpass
(
(
(
)
)
)
2 2 sin N n N n c − − π ω c f 2
Highpass
(
(
(
)
)
)
2 2 sin N n N n c − − − π ω c f 2 1−
Bandpass
(
(
(
)
)
)
(
(
(
)
)
)
2 2 sin 2 2 sin 1 2 N n N n N n N n c c − − − − − π ω π ω(
2 1)
Secara umum, koefisien tanggapan impuls tapis, h
( )
n , dapat diperolehsebagai bentuk yang dihasilkan dari perkalian hd
( )
n dan sebuah fungsi jendela,.
( )
n Wh
( )
n =hd( )
n •W( )
n (2.37)Bergantung kepada bagaimana menentukan W
( )
n diatas, akan didapatkanfungsi jendela yang berbeda. Sebagai contoh, runtun jendela yang paling
sederhana adalah jendela persegi yang didefinisikan sebagai berikut
( )
⎪⎩ ⎪ ⎨⎧ ≤
=
lainnya n n n
W
, 0
2
, 1
(2.38)
Pada kawasan frekuensi tanggapan tapis FIR
( )
jωe
H diberikan oleh
konvolusi atas Hd
( )
ejω dan tanggapan jendela W( )
ejω , yaitu[2]H
( )
ejω =Hd( ) ( )
ejω ∗W ejω (2.39)Oleh karena itu, ide dasar metode jendela dapat dirangkum sebagai berikut
( )
jωd e
H : tanggapan frekuensi ideal.
( )
( )
ωπ ω
π
π
ω d e e H n
hd
∫
d j j n− =
2 1
( )
( ) ( )
( )
ω( ) ( )
jω jωd j
d n W n H e H e W e
h n
Hamming Window
Fungsi dari Hamming window adalah sebagai berikut [9]
( )
⎪⎩ ⎪ ⎨ ⎧ − ≤ ≤ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = lainnya N n untuk N n n W 0 1 0 1 2 cos 46 . 0 54 . 0 π (2.40)Hubungan yang sesuai antara transition width dan panjang tapis (filter length)
untuk merancang tapis dengan Hamming window adalah
N f =3.3
Δ (2.41)
Dengan N adalah panjang tapis dan Δf transition width yang ternormalisasi.
Stopband attenuation maksimum yang mungkin untuk Hamming window adalah sekitar 53 dB, dan puncak passband ripple minimum adalah sekitar 0.0194 dB.
Hanning Window
Fungsi dari Hanning window adalah sebagai berikut
( )
⎪⎩ ⎪ ⎨ ⎧ ≤ ≤ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = lainnya N n untuk N n n W 0 1 0 1 2 cos 5 . 0 5 . 0 π (2.42)Hubungan yang sesuai antara transition width dan panjang tapis (filter length)
untuk merancang tapis dengan Hanning window adalah
N f =3.1
Dengan N adalah panjang tapis dan Δf transition width yang ternormalisasi.
Stopband attenuation maksimum yang mungkin untuk Hamming window adalah sekitar 44 dB, dan puncak passband ripple minimum adalah sekitar 0.0546 dB.
Blackman Window
Fungsi dari Blackman window adalah sebagai berikut
( )
⎪⎩ ⎪ ⎨ ⎧ ≤ ≤ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = lainnya N n untuk N n N n n W 0 1 0 1 4 0.08cos 1 2 cos 5 . 0 42 .0 π π (2.44)
Hubungan yang sesuai antara transition width dan panjang tapis (filter length)
untuk merancang tapis dengan Blackman window adalah
N f =5.5
Δ (2.45)
Dengan N adalah panjang tapis dan Δf transition width yang ternormalisasi.
Stopband attenuation maksimum yang mungkin untuk Hamming window adalah sekitar 74 dB, dan puncak passband ripple minimum adalah sekitar 0.0017 dB.
Kaiser Window
Fungsi dari Kaiser window adalah sebagai berikut
( )
χ 0I adalah fungsi Bessel jenis pertama yang dimodifikasi. I0
( )
χ biasanyadihitung menggunakan power series expansion :
( )
( )
2 1 !
2 1
0 ∑ ⎥⎥
⎦ ⎤ ⎢ ⎢ ⎣ ⎡ = + = L k k k
I χ χ (2.47)
Umumnya L<25.
Nilaiβ ditentukan berdasarkan stopband attenuation yang diperlukan dan
dapat diperkirakan dari salah satu hubungan empiris dibawah ini
(
)
(
)
(
A)
jika A dBdB A dB jika A A dB A jika 50 7 . 8 1102 . 0 50 21 21 07886 . 0 21 5842 . 0 21 0 4 . 0 ≥ − = < < − + − = ≤ = β β
β (2.48a)
(2.48b)
(2.48c)
Dengan A = -20log10(δ) adalah stopband attenuation, δ = min(δp, δs), ketika nilai passband dan stopband ripple mendekati sama. δp adalah passband ripple yang diharapkan dan δs adalah stopband ripple yang diharapkan. Passband ripple
aktual ( ) dan stopband attenuation minimum ( ) dalam desibel dihitung
dengan [4] p
A As
(2.49)
dan
Jumlah koefisien tapis, N, dihitung menggunakan persamaan berikut [5] f A N Δ − ≥ 36 . 14 95 . 7 (2.51)
Dengan Δf adalah transition width yang ternormalisasi. Nilai β dan
digunakan untuk menghitung koefisien Kaiser window,
N
( )
nW .
Rangkuman beberapa hal penting yang berkaitan dengan berbagai fungsi
jendela dapat dilihat pada tabel 2.2. Untuk semua jenis window, kecuali kaiser
window, parameter yang dapat dipilih atau diubah hanya jumlah koefisien tapis (N), parameter lain seperti passband ripple dan stopband attenuation bersifat
tetap. Hal ini disebabkan karena rectangular window, hanning window, hamming
window dan Blackman window memiliki karakteristik yang tetap [2].
Tabel 2.2 Karakteristik beberapa fungsi jendela [2], [9].
Nama runtun jendela Transition width (Hz) (Ternormalisasi) Passband ripple (dB) Main lobe relative to side lobe (dB)
Stopband attenuation
(dB) (maximum)
Window function W(n), 1 0≤n≤N −
Persegi 0.9/N 0.7416 13 21 1 Hanning 3.1/N 0.0546 31 44 ⎟
⎠ ⎞ ⎜ ⎝ ⎛ − − 1 2 cos 5 . 0 5 . 0 N n π
Hamming 3.3/N 0.0194 41 53 ⎟
⎠ ⎞ ⎜ ⎝ ⎛ − − 1 2 cos 46 . 0 54 . 0 N n π
Blackman 5.5/N 0.0017 57 74
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + − − 1 4 cos 8 . 0 1 2 cos 5 . 0 42 . 0 N n N n π π
2.93/N (β=4.54) 0.0274 50 4.32/N (β=6.76) 0.00275 70 Kaiser
5.71/N (β=8.96) 0.000275 90
2.7.2 Metode Optimal
Dalam merancang tapis FIR dengan metode perancangan tapis optimal,
terdapat suatu program yang sudah umum dikenal, yaitu program
Parks-McClellan yang menghasilkan tapis optimal. Optimal dapat didefinisikan dalam
berbagai cara. Program Parks-McClellan menggunakan algoritma pertukaran
Remez (remez exchange algorithm) untuk mengoptimasi rancangan tapis dengan
memilih tanggapan impuls dari panjang yang diberikan (N), yang meminimalkan
riak puncak pada passband dan stopband [3]. Dengan meminimalkan puncak
atau riak maksimum, sama artinya dengan membuat semua puncak lokal pada
riak tersebut bernilai sama satu dengan yang lainnya. Pada umumnya tapis jenis
ini disebut tapis riak-seragam (equiripple) karena puncak lokalnya memiliki
deviasi yang sama terhadap tanggapan tapis yang diinginkan. Karena deviasi riak
maksimum diminimalkan dalam prosedur optimisasi ini, maka tapis jenis ini
disebut juga tapis minimax (meminimalkan riak maksimum).
Bentuk umum tanggapan frekuensi H
( )
ejω untuk tapis FIR adalah [4]( )
e ω e ω/2Hˆ( )
ω ,H j = −jN (2.52)
dengan tanggapan amplitude Hˆ
( )
ω adalah fungsi real dari ω. Fungsi pembobot(weighted) pada kasus ini melibatkan tanggapan amplitude yang dirumuskan
dengan
( )
ω( ) ( )
ω[
ˆ ω( )
ω]
,dengan D
( )
ω adalah tanggapan amplitude yang diharapkan dan W( )
ω adalahfungsi pembobot positif. W
( )
ω dipergunakan untuk mengontrol ukuran relatifdari puncak error pada suatu band frekuensi. Pada metode optimal, perancangan
ditujukan untuk menghitung koefisien tapis, h
( )
n , yang mempunyai nilai errorpembobot maksimum,
ε
( )
ω , yang minimal pada passband dan stopband.Secara matematika dapat diekspresikan sebagai
( )
[
maxε
ω]
min (2.54)
pada passband dan stopband. Ketika max
ε
( )
ω minimal, tapis akan memiliki riak yang seragam pada passband dan stopband.Jika nilai minimum dari nilai absolut puncak
ε
( )
ω pada band ωa ≤ω≤ωbadalah ε0, maka error absolut memenuhi
( )
( )
( )
.0
, ˆ
b a
W D
H ω ω ω
ω ε ω
ω − ≤ ≤ ≤ (2.55)
Pada aplikasi perancangan tapis, tanggapan amplitude yang diharapkan
dirumuskan dengan
( )
⎩ ⎨ ⎧ =
, pada
, 0
, pada
, 1
stopband passband
Dω (2.56)
Gambar 2.9 menunjukkan tanggapan amplitude yang diharapkan pada tiap band
Gambar 2.9 Tanggapan amplitude yang diharapkan untuk: (a) tapis lowpass, (b) tapis highpass (c) tapis bandpass [5].
dan diperlukan tanggapan amplitudeHˆ
( )
ω untuk memenuhi tanggapan yangdiharapkan dengan riak ±δp pada passband, dan riak δs pada stopband. Dari
persamaan (2.53) fungsi pembobot dapat dituliskan sebagai berikut
( )
⎪⎩ ⎪ ⎨ ⎧ =
, pada
,
, pada
, 1
stopband passband W
s p
δ δ
ω (2.57)
atau
( )
⎪⎩ ⎪ ⎨ ⎧ =
, pada
, 1
, pada
,
stopband passband
W s
p δ δ
Jumlah koefisien filter, N, dihitung menggunakan persamaan berikut
(
) (
)(
[
)
]
(
)
, 2 2 , , 2 π ω ω π ω ω δ δ δ δ p s p s s p s p F D N − − − ≅ ∞ (2.59) dengan(
)
[
(
)
(
)
]
(
)
(
)
[
log log]
,log log log , 6 10 5 2 10 4 10 3 10 2 2 10 1 a a a a a a D p p s p p s p + + − + + = ∞ δ δ δ δ δ δ δ (2.60)
(
p, s)
b1 b2[
log10 p log10 s]
,Fδ δ = + δ − δ (2.61)
dan . 51244 . 0 , 01217 . 11 , 4278 . 0 , 5941 . 0 , 00266 . 0 , 4761 . 0 , 07114 . 0 , 005309 . 0 2 1 6 5 4 3 2 1 = = = = = − = = = b b a a a a a a (2.62)
Dengan beberapa manipulasi, tanggapan amplitude untuk tiap tipe tapis
FIR dapat diekspresikan dalam bentuk yang sama. Sehingga dengan
menggunakan algoritma yang sama dapat dirancang semua tipe tapis FIR. Untuk
menemukan bentuk umum tanggapan amplitude, akan diuraikan tiap-tiap tipe
tapis FIR.
Untuk tapis FIR tipe 1, dengan menggunakan notasi tanggapan
amplitude dari persamaan (2.22) dapat dituliskan dalam bentuk
M
N =2
( )
[ ]
cos( )
, ˆ 0 k k a H M k ω ω∑
=dengan
[ ] [ ]
0 hM , a[ ]
k 2h[
M k]
, 1 k M,a = = − ≤ ≤ (2.64)
Untuk tapis FIR tipe 2, tanggapan amplitude dari persamaan (2.26) dapat
dituliskan dalam bentuk
( )
( )[ ]
(
(
)
)
, 2 1 cosˆ 2 1 2 1 − =
∑
+ = k k b H M k ωω (2.65)
dengan
[ ]
2 1 2 2 1 2 1 ,2 + ≤ ≤ +
⎥⎦ ⎤ ⎢⎣
⎡ −
= h M k k M
k
b (2.66)
Persamaan (2.65) dapat diekspresikan dalam bentuk
( )
( )
( ) ~[ ]
cos( )
, 2cos
ˆ 2 1 2
0 k k b H M k ω ω ω
∑
− == (2.67)
dengan
[ ]
(
~[ ]
1 2~[ ]
0 21
1 b b
b = +
)
(2.68a)[ ]
(
[ ] [
]
)
2 1 2 2 , 1 ~ ~ 21 + − ≤ ≤ −
= b k b k k M
k
b (2.68b)
, 2 1 2 ~ 2 1 2 1 2 ⎥⎦ ⎤ ⎢⎣ ⎡ − = ⎥⎦ ⎤ ⎢⎣
⎡ + M
b M
Tanggapan amplitude untuk tapis FIR tipe 3 yang diberikan oleh persamaan (2.30) dapat dituliskan dalam bentuk
( )
∑
[ ]
( )
= = M k k k c H 1 , sinˆ ω ω (2.69)
dengan
[ ]
k 2h[
M k]
, 1 k M.c = − ≤ ≤ (2.70)
Persamaan (2.69) dapat diekspresikan dalam bentuk
( )
∑
−[ ]
( )
= = 1 0 , cos ~ sin ˆ M k k k cH ω ω ω (2.71)
dengan
[ ] [ ]
~[ ]
1, 2 1 0 ~1 c c
c = − (2.72a)
[ ]
(
~[
1] [ ]
~)
, 2 1, 2 1 − ≤ ≤ − −= c k c k k M
k
c (2.72b)
[ ]
~[
1.2 1
− = c M M
c
]
(2.72c)Tanggapan amplitude untuk tapis FIR tipe 4 yang diberikan oleh
persamaan (2.34) dapat dituliskan dalam bentuk
( )
( )[ ]
,2 1 sin
ˆ 2 1 2 1
∑
+ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = M k k k ddengan
[ ]
, 2 1 2 1 , 2 1 22 ⎢⎣⎡ + − ⎥⎦⎤ ≤ ≤ +
= h M k k M
k
d (2.74)
Persamaan (2.73) dapat diekspresikan dalam bentuk
( )
( )
( ) ~[ ]
cos( )
, 2sin
ˆ 2 1 2
0
∑
− = = M k k k dH ω ω ω (2.75)
dengan
[ ] [ ]
~[ ]
1, 2 1 0 ~1 d d
d = − (2.76a)
[ ]
(
[
] [ ]
)
, 2 1 2 2 , ~ 1 ~ 2 1 − ≤ ≤ − −= d k d k k M
k
d (2.76b)
. 2 1 2 ~ 2 1 2 ⎥⎦ ⎤ ⎢⎣ ⎡ − = ⎥⎦ ⎤ ⎢⎣
⎡ + M
d M
d (2.76c)
Dengan mengamati persamaan (2.63), (2.67), (2.71) dan (2.75), terlihat
bahwa tanggapan amplitude untuk semua tipe tapis FIR dapat dituliskan dalam
bentuk
( )
( ) ( )
,ˆ ω Qω Aω
H = (2.77)
dengan faktor pertama, Q
( )
ω , adalah( )
( )
( )
( )
⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎨ ⎧ = 4, untuk tipe , 2 sin 3, untuk tipe , sin 2, untuk tipe , 2 cos 1, untuk tipe , 1 ω ω ω ωQ (2.78)
dan faktor kedua, A
( )
ω , dalam bentuk( )
∑
[ ]
( )
= = L k k k a A 0 , cos ~ ωω (2.79)
dengan
( )
[ ]
[ ]
[ ]
[ ]
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ = 4, untuk tipe , ~ 3, untuk tipe , ~ 2, untuk tipe , ~ 1, untuk tipe , ~ k d k c k b k a ka (2.80)
dan ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎨ ⎧ − − − = 4, untuk tipe , 2 1 2 3, untuk tipe , 1 2, untuk tipe , 2 1 2 1, untuk tipe , M M M M
L (2.81)
Dengan mensubstitusikan persamaan (2.77) pada persamaan (2.53)
( )
( ) ( ) ( )
[
( )
]
( ) ( ) ( )
( )
( )
.⎥
⎦ ⎤ ⎢
⎣ ⎡
− =
− =
ω ω ω
ω ω
ω ω
ω ω ω
ε
Q D A
Q W
D A
Q W
(2.82)
Dengan menggunakan notasi W~
( )
ω =W( ) ( )
ω Qω dan D~( )
ω =D( ) ( )
ω Qωpersamaan diatas dapat ditulis menjadi
![Gambar 2.1 Runtun waktu diskrit [2].](https://thumb-ap.123doks.com/thumbv2/123dok/1549485.2047163/26.609.141.519.401.756/gambar-runtun-waktu-diskrit.webp)
![Gambar 2.3 Ilustrasi empat jenis tanggapan impuls [4].](https://thumb-ap.123doks.com/thumbv2/123dok/1549485.2047163/32.609.195.466.103.535/gambar-ilustrasi-empat-jenis-tanggapan-impuls.webp)
![Gambar 2.4 Contoh lokasi zero pada tapis FIR [4].](https://thumb-ap.123doks.com/thumbv2/123dok/1549485.2047163/39.609.194.495.295.587/gambar-contoh-lokasi-zero-pada-tapis-fir.webp)
![Gambar 2.7 Spesifikasi tanggapan frekuensi untuk tapis lowpass dengan ripple yang tidak seragam pada passband dan stopband [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1549485.2047163/43.609.182.482.496.710/gambar-spesifikasi-tanggapan-frekuensi-lowpass-seragam-passband-stopband.webp)
![Tabel 2.2 Karakteristik beberapa fungsi jendela [2], [9].](https://thumb-ap.123doks.com/thumbv2/123dok/1549485.2047163/50.609.133.545.461.744/tabel-karakteristik-fungsi-jendela.webp)
![Gambar 2.9 (b) tapis Tanggapan amplitude yang diharapkan untuk: (a) tapis lowpass, highpass (c) tapis bandpass [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1549485.2047163/53.609.160.498.115.395/gambar-tapis-tanggapan-amplitude-diharapkan-lowpass-highpass-bandpass.webp)