TUGAS AKHIR
Pengenalan Alat
–
alat Stasioneri secara
RealTime
Menggunakan
Ekstrasi Ciri DST
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh
Gelar Sarjana Teknik (S1) Program Studi Teknik Elektro
Teknik Elektro Universitas Sanata Dharma Yogyakarta
Disusun oleh:
Febriyanto
NIM
095114024
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2014
ii
FINAL PROJECT
REALTIME STATIONERY EQUIPMENT RECOGNITION USING DST
FEATURE EXTRACTION
Presented as Partial Fulfillment of the Requirements to Obtain
Sarjana Teknik
Degree in Electrical Engineering Study Program
By:
FEBRIYANTO
095114024
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
vi
LEMBAR PERSEMBAHAN
Yang Utama Dari Segalanya...
Jesus Christ Tuhan Sang pemilik nyawaku. Terimakasih untuk semua kesempatan yang
terbaik dalam hidupku, terimakasih Tuhan yang selalu mau membimbing, memberkati,
menuntun dan mengantarkanku pada tempat terbaik di bumi ciptaanMu ini, terimakasih
pula telah memberikanku manusia–manusia yang luar biasa seperti mereka semua. Terima kasih Tuhan, biarkan aku terus mencintai, mengimani_Mu hingga akhir nafasku dibumi
ini. Taburan cinta dan kasih sayang yang kuterima dari_Mu yang begitu besar telah
memberikanku kekuatan, membekaliku dengan ilmu serta memperkenalkanku dengan
cinta. Atas karunia serta kemudahan yang Engkau berikan hingga akhirnya Tugas Akhir
dengan judul Pengenalan Alat–alat Stasioneri Secara RealTime Menggunakan
Ekstrasi Ciri DST ini dapat terselesaikan dengan baik.
Kupersembahkan Tugas Akhir sederhana ini kepada orang yang sangat
kukasihi dan kusayangi...
Almarhumah Ibunda dan Ayahanda Tercinta
Tiada kata–kata spesial yang dapat ku berikan kepada kalian, namun sebagai tanda bakti, hormat, rasa cinta dan terimakasih yang tiada terhingga kupersembahkan Tugas Akhir ini
kepada almarhumah Ibunda dan Ayahanda tercinta yang telah memberikan semangat,
kasih sayang, segala dukungan, waktu serta pengorbanan, kebersamaan, kecerian dan cinta
kasih yang tiada terhingga yang tak mungkin dapat kubalas semua ketulusanmu itu dari ku
lahir hingga ku sedewasa ini, hanya dengan selembar kertas yang bertuliskan kata cinta dan
persembahan ini. Semoga ini bisa membuat almarhumah Ibu dan Ayah bahagia dan sedikit
melegakan, kusadar selama ini belum bisa berbuat yang lebih lagi untuk membahagiakan
kalian dan mungkin ini bukan hasil terbaik yang kalian harapkan. Untuk almahumah Ibu
dan Ayah yang selalu membuatku termotivasi dan bersemangat, yang selalu menyirami
jiwaku dengan kasih sayang, selalu mendoakanku, selalu menasehatiku dengan kata–kata indah agar menjadi yang lebih baik, kalian inspirasi, semangat, motivator, dan kekuatanku
dalam menjalani kehidupan yang penuh akan rintangan..
Terima kasih almarhumah Ibunda Tri Lestari.. Terima kasih Ayahanda drg. Richardus
Bambang Budiyanto atas segala keringat, air mata, canda tawa, kebersamaan dan cinta
vii
my heart and you will never be replaced. Membahagiakan dan membalas apa yang telah
diberikan orang tua kepada kita adalah kewajiban setiap anak…
My Brother’s dan Sister
kakakku, Mas Angga dan Mbak Maya makasih atas supportnya selama ini, tiada yang
paling mengharukan saat kita kumpul bersama, walaupun sering ada percecokan diantara
kita tapi hal itu selalu menjadi warna yang tak akan bisa tergantikan dan ini hal terindah
dalam keluarga, terima kasih atas segala doa, bantuan kalian selama ini, hanya karya ini
yang dapat ku persembahkan. Maaf belum bisa menjadi panutan seutuhnya, tapi aku akan
selalu menjadi yang terbaik untuk kalian semua.
Almamaterku
Untuk almamaterku Universitas Sanata Dharma Yogyakarta khususnya program studi
Teknik Elektro Fakultas Sains dan Teknologi terimakasih untuk kebersamaannya.
your dreams today, can be your future tomorrow
viii
LEMBAR MOTTO.
Pray, Love, Dream, Believe, Spirit and Never Give Up.
“Tanpa adanya perjuangan, kemajuan takkan terjadi” (Amaray Ferderick Douglas)
Jadikanlah sabar dan doa sebagai pedoman dalam menjalani kehidupan saat ini dan
yang akan datang senang maupun susah.
Jadikan sabar N doa sbg pedoman dlm jalani kehidupan saat ni N yg kan dtang snang maupun susah krna kekuatan doa dpt mngubah sgala sesuatu
Hidup perlu cinta,
Maka laluilah hari-harimu dengan penuh cinta dan kasih sayang.
Hidup juga perlu kejujuran, ketekunan, dan keuletan,
Kehidupan tanpa kejujuran akan membawa kita dalam jurang kehancuran.
Jangan pantang menyerah dalam hidup.
Gapailah semua keinginan dan cita-citamu walaupun itu terasa berat.
Tumbuhkan rasa saling percaya diantara sesama
Karena dengan percaya puji TUHAN kita akan hidup bahagia.
Aku memandang sisi kehidupan yang cerah dan merenungi kesulitan dengan keyakinan
bahwa tantangan dapat diatasi dan segala sesuatu dapat berubah menanda baik, karena aku
beriman pada Tuhan, percaya pada diriku dan sesama..
(Carmen 1992)
“Tuhan membuat semuanya indah pada waktunya, tidak terlalu cepat, dan tidak pernah terlalu terlambat, tetapi selalu tepat pada waktunya Percaya pada pengaturan waktu
Tuhan..”
Hadapilah tantangan hidup ini setiap hari, dan apabila merasa tawar, lalu mendekatlah
kepada Tuhan, kekuatannya dapat membuatmu penuh kekuatan dan keindahan.
x
Intisari
Stasioneri merupakan peralatan yang sering kita gunakan dalam kehidupan sehari– hari khususnya dunia pendidikan dan kerja. Alat–alat stasioneri yang digunakan dalam proses pengenalan antara lain peralatan tulis menulis dan peralatan kerja. Alat stasioneri memiliki tingkat kesulitan dalam proses pengenalan karena bentuknya yang hampir mirip satu dengan yang lain.
Mengenali suatu objek dibutuhkan proses percobaan yang panjang, yang didapatkan berdasarkan ciri–ciri dan pengalaman yang didapatnya melalui pengalaman pengamatan objek yang mirip. Penerapan dalam bidang komputasi, disebut dengan pengenalan pola. Metode yang digunakan dalam proses mendapatkan ciri–ciri dari citra maka digunakan ekstrasi ciri discrete sine transform.
Discrete Sine Transform yang digunakan adalah tipe dua dimensi. Discrete Sine Transform dua dimensi merupakan satu dimensi transformasi yang dihitung dalam setiap baris dan kolom. Discrete Sine Transform ini digunakan untuk menentukan ciri dari gambar yang akan dikenali. Setelah didapat ciri kemudian gambar tersebut akan dihitung selisihnya dengan database. Untuk menghitung selisih nilai masukan yang didapat dengan nilai database digunakanlah suatu metode perhitungan jarak Euclidean. Dengan jarak Euclidean ini nilai jarak yang paling kecil antara nilai masukan dengan database akan di golongkan dengan gambar yang sama dengan database.
xi
Abstract
Stationery is equipment that is often used in everyday life especially education and employment. Stationery tools used in the process of introducing, among others, writing equipment and tooling. Stationery tools have difficulties in the recognition process because its shape is almost similar to each other.
Recognize an object takes a long process of trial, which is obtained based on the characteristics and experiences acquired through observation of objects similar experience. Implementation in the field of computing, called pattern recognition. The method used in the process to acquire the features of the used extraction of image characteristic of discrete sine transform.
Discrete Sine Transform used is a two-dimensional type. Two-dimensional Discrete Sine Transform is a one-dimensional transformation calculated in each row and column. Discrete Sine Transform is used to determine the characteristics of the image to be recognized. Having obtained the image characteristics would then calculated the difference in the data base. To calculate the difference in obtained value of the input with the value of data base is used a Euclidean distance calculation method. With Euclidean distance is the smallest distance value the input between to the data base will be classified in the same picture with the data base.
Key word: stationery, Discrete Sine Transform, Webcam, Euclidean distance, Matlab
xii
KATA PENGANTAR
Puji syukur kehadirat Tuhan Yang Maha Esa atas segala rahmat, karunia, bimbingan dan
lindungan_Nya kepada penyusun, sehingga penyusun dapat menyelesaikan laporan Tugas
Akhir ini. Laporan Tugas Akhir ini dengan judul Tugas Akhir Pengenalan Alat–alat
Stasioneri Secara RealTime Menggunakan Ekstraksi Ciri DST yang disusun dan
diajukan sebagai salah satu syarat untuk menyelesaikan studi di Program Studi Strata Satu
(S1) Teknik Elektro Fakultas Teknik Sains dan Teknologi Universitas Sanata Dharma
Yogyakarta.
Penulis merasa banyak mendapat saran, bimbingan, serta bantuan dari berbagai pihak
selama menyelesaikan laporan Tugas Akhir ini. Oleh karena itu, tidak lupa penulis
mengucapkan terima kasih khususnya kepada :
1. Teristimewa untuk Almarhumah Ibunda Tri Lestari dan Ayahanda drg Richardus
Bambang Budiyanto tercinta yang telah memberikan dukungan baik itu moril
maupun materiil sehingga penulis dapat menyelesaikan Tugas Akhir ini dengan
baik, maaf mungkin ini bukan yang terbaik yang diinginkan dan maaf menunggu
terlalu lama.
2. Kakaku Mas Angga, Mbak Maya, makasih dukungannya sehingga Tugas Akhir
dapat terselesaikan.
3. Bapak Drs Johanes Eka Priyatma,M.Sc.,Ph.d, selaku Rektor Universitas Sanata
Dharma Yogyakarta.
4. Ibu Paulina Heruningsih Prima Rosa, S.Si., M.Sc, selaku Dekan Fakultas Sains dan
Teknologi Universitas Sanata Dharma Yogyakarta.
5. Bapak Dr. M. Linggo Sumarno, MT selaku dosen pembimbing Tugas Akhir yang
telah banyak memberikan pengarahan, bimbingan, petunjuk serta motivasi dan
mencurahkan segala waktu yang sangat berguna dalam penyelesaian dan
penyusunan Tugas Akhir ini. Semoga Tuhan Yang Maha Esa membalas segala
kebaikan yang telah diberikan.
6. Bapak Pius dan Ibu Prima selaku penguji Tugas Akhir yang telah memberikan
kritik, saran serta masukan yang sangat membangun.
7. Bapak Petrus Setyo Prabowo, ST, MT selaku Dosen Pembimbing Akademika
angkatan 2009 dan kaprodi Teknik Elektro terimakasih atas masukan dan
xiii
8. Ibu Wiwien Widyastuti, S.T., M.T., selaku wakil kaprodi Teknik Elektro yang telah
banyak membantu penulis.
9. Bapak dan Ibu dosen Program Studi Teknik Elektro Universitas Sanata Dharma
Yogyakarta yang telah memberikan perhatian dan ilmu yang tak ternilai harganya,
laboran Teknik Elektro dan semua staff sekretariat (akademika) Fakultas Sains dan
Teknologi Universitas Sanata Dharma Yogyakarta terimakasih bantuannya.
10.Pakde dan bude Marsono makasih atas rumah yang saya tempati selama di
Yogyakarta.
11.Mas surya, diego, mas anang, mas wahyu, dan mas danang atas kebersamaan
selama ini di jombor.
12.Untuk teman–temanku se-angkatan dan semua teman–teman Teknik Elektro Universitas Sanata Dharma Yogyakarta terimakasih atas bantuan dan kebersamaan
kita selama belajar di bangku kuliah terutama di Fakultas Sains dan Teknologi
Prodi Teknik Elektro.
13.Semua pihak yang telah membantu dalam penyusunan laporan tugas Akhir ini yang
tak bisa saya sebutkan satu persatu.
Penulis menyadari bahwa laporan ini masih jauh dari sempurna. Oleh karena itu penulis
sangat menghargai kritik dan saran yang membangun untuk kesempurnaan dari laporan ini.
Akhirnya penulis berharap laporan Tugas Akhir ini dapat bermanfaat bagi penulis dan para
pembaca.
Yogyakarta, 06 Maret 2014
Febriyanto
xiv
HALAMAN PENGESAHAN... ... iv
LEMBAR KEASLIAN KARYA ... v
LEMBAR PERSEMBAHAN... vi
LEMBAR MOTTO... ... viii
xv
2.8 Two DimensionDiscrete Sine Transform ( DST ) ... .. .. 9
2.9 Zig–zag Scanning... .. 10
2.10 MatLab ... 10
2.9.1 Karakteristik MatLab... 11
BAB III PERANCANGAN 3.1 Gambaran Sistem... .... 12
3.1.1 Alat Stasioneri... .. .. 12
3.1.2 Webcam... .. .. 13
3.1.3 Proses pengenalan alat–alat stasioneri... .. .. 13
3.2 Perancangan Database Citra Alat–alat stasioneri... …. 15
3.3 Gambar Uji... …. 16
3.4 Perancangan tampilan GUI Matlab... …. 17
3.5 Perancangan Alur Program... …. 18
BAB IV HASIL DAN PEMBAHASAN 4.1 Pengujian program pengenalan alat–alat stasioneri secara RealTime menggunakan ekstraksi ciri DST... …. 23
4.2 Penentuan nilai parameter………..……… 26
4.3 pengujian nilai parameter... ….. 29
4.4 Pengujian saat objek salah... ... 29
4.5 Analisis program pengenalan... ... 30
4.6 Keterbatasan Metodologi………...…. 32
BAB V PENUTUP A. Kesimpulan... …... 33
B. Saran... 33
Daftar Pustaka
Lampiran
xvi
DAFTAR GAMBAR
halaman
Gambar 2.1 Alat–alat stasioneri yang digunakan... 5
Gambar 2.2 Gambar Webcam... 5
Gambar 2.3 Intensitas grayscale... 7
Gambar 2.4 Citra grayscale yang diubah menjadi nilai matriks... 7
Gambar 2.5 Proses pemotongan citra ... 8
Gambar 2.6 Citra grayscal sebelum resizing dan hasil resizing…... 8
Gambar 2.7 Transformasi spasial... ... 9
Gambar 2.8 Path zig-zag scanning... 10
Gambar 3.1 Blok diagram keseluruhan sistem pengenalan alat stasioneri... 12
Gambar 3.2 Blok diagram proses pengenalan alat stasioneri…………...…... 13
Gambar 4.10 Pengaruh Koefisien DST terhadap Hasil pengenalan……….. 27
Gambar 4.10 (Lanjutan) Pengaruh Koefisien DST terhadap Hasil pengenalan……… 28
Gambar 4.10 (Lanjutan) Pengaruh Koefisien DST terhadap Hasil pengenalan……… 28
xvii
Gambar 4.12 sub program Preprocessing……… 31 Gambar 4.13 sub program ekstraksi cirri………. 31 Gambar 4.14 sub program jarak Euclidean……….. 32
xviii
DAFTAR TABEL
halaman
Tabel 2.1 Jenis–jenis transformasi affine…... 9
Tabel 3.1 Spesifikasi webcam Logitech c 270.………... 13
Tabel 3.2 Keterangan tampian utama program………... 18
Tabel 4.1 pengujian alat stasioneri koefisien DST 36……….. 27
Tabel 4.2 Pengaruh Koefisien DST terhadap tingkat pengenalan... 29
Tabel 4.3 pengujian saat alat stasioneri posisi tidak tepat atau digeser……….. 30
Tabel 4.4 pengujian saat alat stasioneri posisi dibalik………. 30
1
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Mata merupakan indera terbaik yang dimiliki manusia, citra memegang peranan
yang sangat penting dalam perspektif manusia. Mata manusia memiliki keterbatasan dalam
menangkap sinyal elektromagnetik. Komputer atau mesin pencitraan dapat menangkap
keseluruhan sinyal elektromagnetik mulai dari gamma hingga gelombang radio. Mesin
pencitraan dapat bekerja dengan citra dari sumber yang tidak sesuai, tidak cocok atau tidak
dapat ditangkap dengan penglihatan manusia. Hal ini yang menyebabkan pengolahan citra
digital memiliki kegunaan dan spektrum aplikasi yang sangat luas [1].
Indera penglihatan manusia memiliki kemampuan mengidentifikasi bentuk atau
obyek yang memiliki kemiripan sangat sempurna bahkan hampir sama sekalipun, mata
manusia akan mengumpulkan benda atau obyek yang dilihatnya sesuai dengan kategori
yang telah ditentukan oleh manusia ke dalam kelompok sejenis. Contoh kemampuan indera
penglihatan manusia dalam membedakan atau mengklasifikasikan bentuk atau obyek yang
dilihatnya misalkan meja. Melihat dari fungsi, ciri dan karakterisktik meja yang pernah
dilihat akan disimpan dalam otak manusia. Meskipun indera penglihatan manusia tidak
melihat segala jenis dan bentuk meja yang ada, namun indera penglihatan manusia dapat
mengidentifikasi suatu obyek yang sejenis.
Indera penglihatan manusia yang mampu mengidentifikasi suatu obyek telah
mengembangkan akal dan pikiran manusia dalam menciptakan penemuan–penemuan yang sangat penting dan dapat diterima secara luas oleh masyarakat umum dari berbagai lapisan
untuk mengurangi ketertinggalan dalam proses kehidupan bermasyarakat. Salah satu
penemuan hebat manusia adalah terciptanya suatu alat yang dapat membantu aktifitas
manusia seperti komputer. Komputer dari tahun ke tahun selalu berkembang, mulai dari
kegunaan maupun bentuknya. Dulu komputer hanya berfungi untuk alat bantu menghitung
saja, namun seiring perkembangan zaman yang semakin maju, berkembang pesat, serba
modern dan praktis yang disertai dengan kemajuan ilmu pengetahuan dan teknologi yang
sangat pesat telah mendatangkan banyak manfaat bagi peningkatan taraf hidup, peradaban,
serta martabat manusia. Kini komputer tidak hanya digunakan untuk alat bantu hitung
semata namun telah membantu manusia dalam bekerja. Kini komputer telah dapat
digunakan untuk mengidentifikasi pola golongan darah, pengenalan jenis ikan,
tulisan/abjad, angka, alat, tanda tangan seseorang, sidik jari, iris mata, bahkan wajah
manusia sekalipun. Dalam mengidentifikasi pengenalan pola–pola seperti yang telah disebutkan diatas banyak metode yang dapat digunakan seperti menggunakan Fast Fourier
Transform (FFT)[2], Metode Hidden Markov[3], Discrete Cosine Transform (DCT)[4],
Transformasi wavelet diskrit[5], Transformasi walsh[6], Metode Korelasi[7], Jaringan
Syarat Tiruan (JST)[8], dan masih banyak lainnya.
Saat sekarang perkembangan ilmu dan teknologi bidang otomatisasi yang cenderung
meningkat adalah kebutuhan akan software pengenalan atau pengolahan citra, sebagai
salah satu sarana pengidentifikasian suatu alat dalam rupa gambar alat–alat stasioneri yang biasa digunakan dalam kegiatan belajar sehari–hari dan bekerja. Alat yang digunakan itu berupa peralatan tulis–menulis maupun peralatan kantor atau kerja.
Banyak penelitian–penelitian yang telah dilakukan tentang pengenalan obyek. Contoh pengenalan obyek yang pernah dilakukan antara lain: pengenalan pola sidik jari
menggunakan Jaringan Syaraf Tiruan dengan metode pembelajaran Backpropogation[9],
pengenalan pola golongan darah menggunakan jaringan syaraf tiruan (JST)
backpropogation[10], Pengenalan Wajah Menggunakan AlihRagam Wavelet Haar dan
Jarak Euclidean[11], pengenalan rumput laut menggunakan Euclidean distance berbasis
ekstraksi fitur[12], pengenalan sidik jari manusia dengan matriks kookurensi aras keabuan
(Gray Level Co-ocurrence Matrix)[13], pengenalan jenis–jenis ikan menggunakan metode analisis komponen utama[14].
Berdasarkan uraian permasalahan yang ada dan telah dijelaskan diatas, penulis
berminat membuat aplikasi software yang digunakan untuk mengenali obyek foto alat–alat stasioneri yang diambil melalui webcam menggunakan rumus pengukuran fungsi jarak
Euclidean dan metode ekstrasi ciri Discrete Sine Transform (DST). Fungsi jarak Euclidean
merupakan metode yang dapat digunakan untuk menentukan suatu tingkat kemiripan data,
dengan mengukur jarak berdasarkan rumus tertentu, sedangkan untuk mendapatkan suatu
ciri pada data obyek gambar alat stasioneri menggunakan metode ekstari ciri Discrete Sine
Transform(DST).
1.2 Tujuan dan manfaat.
Tujuan dari penulisan penelitian tugas akhir adalah untuk menghasilkan suatu sistem
3
digunakan pada penelitian tugas akhir seperti: ballpoint, gunting, stabilo, tipe_x, paper
klip, steples, buku kecil (note), cutter, dan pelubang kertas. Apabila menyebut judul tugas
akhir mengenai pengenalan alat–alat stasioneri masih ada masyarakat yang kurang familiar dengan nama ini, sehingga diambil judul tugas akhir Pengenalan Alat–alat Stasioneri Secara RealTime Menggunakan Ekstrasi Ciri Descrete Sine Transform (DST).
1.3 Batasan masalah.
Sistem otomatisasi yang dilakukan tentang pengenalan gambar seperti alat stasioneri
terdiri dari hardware dan software (komputer). Hardware berfungsi untuk memasukkan
gambar, sedangkan software pada komputer berfungsi untuk mengatur semua proses
pengenalan gambar yang diperoleh dari hasil pemotretan melalui webcam.
Pada perancangan sistem ini, penulis memfokuskan pembuatan software komputer untuk
memproses pengenalan gambar, sedangkan untuk hardware berupa webcam. Beberapa
batasan masalah yang dianggap perlu pada perancangan tugas akhir, yaitu sebagai berikut:
1. Alat- alat stasioneri yang digunakan berupa: ballpoint, gunting, stabilo, tipe_x, paper
klip, staples, buku kecil(note), cutter, dan pelubang kertas.
2. Hasil pengenalan secara real time.
3. Menggunakan perangkat lunak komputasi Matlab dalam pembuatan program
pengenalan gambar.
4. Menggunakan ekstrasi ciri DST.
5. Menggunakan evaluasi fungsi jarak Euclidean.
6. Menggunakan webcam sebagai hardware.
7. Webcam akan ditempatkan pada dudukan atau tempat yang telah disediakan atau dibuat
sebelumnya.
8. Tinggi atau jarak yang digunakan antara webcam dan obyek berkisar ± 50 cm karena
dengan jarak tersebut merupakan jarak minimun dengan obyek yang akan di capture
dapat terlihat jelas.
9. Pencahayaan yang digunakan berdasarkan pencahayaan dari lampu Laboratorium TA.
1.4 Metodologi Penelitian
1.4.1. Metode Studi Pustaka
Dalam penyusunan Tugas Akhir, Peneliti mempelajari banyak dari buku–buku yang relevan dengan judul penelitian yang diambil melalui Internet dan berbagai literatur– literatur dari Internet mengenai pengertian stasioneri, pengertian webcam, pengolahan
citra, fungsi jarak Euclidean, transformasi sinus diskrit, dan tentang Matlab.
1.4.2 Prosedur Penelitian
Langkah-langkah dalam pengerjaan tugas akhir:
a. Pengumpulan bahan–bahan referensi berupa buku–buku dan jurnal–jurnal yang di ambil melalui Internet.
b. Perancangan subsistem software.
Tahap ini bertujuan untuk mencari bentuk model yang optimal dari sistem yang akan
dibuat dengan mempertimbangkan berbagai faktor–faktor permasalahan. c. Pembuatan subsistem software.
Sistem akan bekerja apabila user memberikan interupsi melalui PC dengan media
push button yang sudah disediakan dalam software. Sistem akan mengolah interupsi
yang diterima dan memulai proses capture picture sampai user memberikan interupsi
kembali untuk menghentikan proses capture. Setelah itu, user memberikan interupsi
untuk memulai proses pengenalan gambar. Komputer akan mengolah gambar dan
menyajikannya sebagai sebuah informasi.
d. Analisa data dilakukan dengan menyelidiki pengaruh variasi jumlah koefisien DST
Dengan 54 kali percobaan (9 gambar stasioneri x 6) terhadap tingkat pengenalan.
Penyimpulan hasil dilakukan dengan mencari jumlah koefisien DST yang
5
BAB II
DASAR TEORI
2.1 Stasioneri
Stasioneri berasal dari Bahasa Inggris yaitu stationery[15]. Stasioneri merupakan
kata benda yang memiliki arti peralatan tulis–menulis. Contoh alat stasioneri meliputi
peralatan tulis (pensil, penggaris, ballpoint, tipe_x dan lainnya), souvenir, dan peralatan
kerja (papper klip, spidol, kertas hvs, pelubang kertas, gunting, ballpoint, cutter, stabilo
dan lainnya). Gambar alat stasioneri yang digunakan dapat dilihat pada gambar II.1
Gambar II.1 Alat stasioneri yang digunakan
Dalam Tugas Akhir alat stasioneri yang dipakai meliputi: ballpoint, gunting,
stabilo, tipe_x, paper klip, steples, buku kecil(note), cutter, dan pelubang kertas.
2.2 Webcam
Webcam singkatan dari Web Camera yang berasal dari bahasa Inggris, digunakan
secara RealTime [16]. Banyak merk webcam yang tersedia, misalnya Logitech,
SunFlowwer, dan lainnya. Resolusi dari webcam biasanya sama berkisar antara 352×288 /
640×480 piksel atau bahkan lebih besar, ada yang kualitasnya hingga 5 Megapiksel.
Webcam sebuah kamera video digital berukuran kecil dihubungkan ke komputer melalui
port USB atau port COM. Gambar webcam yang digunakan dapat dilihat pada gambar II.2
Gambar II.2. webcam[17]
2.3 Pengolahan Citra
2.3.1 Definisi
Citra (image) merupakan istilah lain untuk gambar, salah satu komponen
multimedia yang memegang peranan sangat penting sebagai bentuk informasi visual. Citra
mempunyai karakteristik yang tidak dimiliki oleh data teks. Citra kaya dengan informasi.
Secara harafiah, citra dapat diartikan sebagai gambar pada bidang dwimatra (dua dimensi).
Bila ditinjau dari sudut pandang matematis, maka citra merupakan fungsi menerus
(continue) dari intensitas cahaya pada bidang dwimatra. Sumber cahaya yang menerangi
suatu obyek dan obyek akan memantulkan kembali sebagian dari berkas cahaya yang
menerangi obyek tersebut. Pantulan cahaya ini ditangkap oleh alat–alat optik, misalnya
mata pada manusia, kamera, pemindai (scanner), dan sebagainya, sehingga bayangan
obyek yang disebut citra tersebut terekam[18].
Citra dibedakan menjadi dua:
a. Citra diam (still images)
Citra diam adalah citra tunggal yang tidak bergerak, sering di sebut citra saja.
b. Citra bergerak (moving images)
Citra bergerak ialah rangkaian citra diam yang ditampilkan secara beruntun yang
memberi kesan pada mata sebagai gambar bergerak. Setiap citra dalam rangkaian
disebut frame.
Digitalisasi citra merupakan suatu representasi citra secara numerik dengan nilai–
nilai diskrit. Digitalisasi adalah representasi citra dari fungsi malar (kontinu) menjadi
nilai–nilai diskrit, sehingga citra yangdihasilkan dari proses ini disebut citra digital (digital
image)[19].
Derau (noise) merupakan suatu masalah yang terjadi pada proses pengolahan citra.
Derau adalah gambar atau piksel yang mengganggu kualitas citra. Derau dapat disebabkan
oleh gangguan fisis (optik) pada alat akuisisi maupun secara disengaja akibat proses
pengolahan yang tidak sesuai. Contoh terdapat bintik hitam atau putih yang muncul secara
acak yang tidak diinginkan dalam citra, bintik acak ini disebut derau salt and pepper[20].
Salah satu proses awal pengolahan citra yaitu memperbaiki kualitas citra yang
mengalami masalah atau gangguan. Perbaikan kualitas citra sangat diperlukan karena citra
yang dijadikan obyek pembahasan, mempunyai kualitas yang buruk, misal citra mengalami
derau pada saat pengiriman melalui saluran transmisi, citra terlalu terang atau gelap,
7
diperbaiki sehingga citra dapat digunakan untuk aplikasi lebih lanjut, misal untuk aplikasi
pengenalan obyek di dalam citra[21].
2.3.2 Citra grayscale
Citra dikatakan sebagai citra grayscale apabila sebuah citra tidak memiliki warna
RGB atau dapat dikatakan sebuah citra yang memiliki nilai dari putih yang memiliki
intensitas paling besar sampai hitam yang memiliki intensitas paling rendah seperti yang
dapat dilihat pada gambar II.3. Citra Grayscale terdiri dari x dan y dalam spasial koordinat
dan memiliki nilai intensitasnya masing–masing. Pada citra grayscale setiap gambar
memiliki intensitas antara 0 (hitam) hingga 255 (putih) dalam citra 8 bitnya[22].
Gambar II.3. Intensitas grayscale [23]
Gambar II.4. citra grayscale yang diubah menjadi nilai matriks[1].
Dengan algoritma perhitungan tingkat keabuan, piksel dari suatu citra yang
mengandung warna–warna RGB (red, green and blue) diubah menjadi warna dalam
berbagai tingkat keabuan (I) dengan menjumlahkan nilai warna red, green, and blue
kemudian dibagi tiga sehingga didapatkan nilai rata–rata dari ketiga warna[22].
(2.1)
2.4 Cropping
Cropping adalah proses pemotongan citra pada koordinat tertentu pada area
citra[24]. Untuk memotong bagian dari citra digunakan dua koordinat, yaitu koordinat
awal yang merupakan awal koordinat bagi citra hasil pemotongan dan koordinat akhir yang
merupakan titik koordinat akhir dari citra hasil pemotongan. Sehingga akan membentuk
bangun segi empat yang mana tiap-tiap pixel yang ada pada area koordinat tertentu akan
disimpan dalam citra yang baru.
Citra asli Hasil Cropping
Gambar II.5 Gambar Proses Pemotongan Citra
Dari gambar II.5 dijelaskan bahwa terjadi proses pemotongan citra. Ukuran pixel
awal citra asli adalah 5×5pixel, setelah dilakukan proses pemotongan koordinat awal (1,1)
dan koordinat akhir (3,3) dengan lebar 3 pixel dan tinggi 3 pixel akan terbentuk citra baru
dengan ukuran 3×3 pixel. Citra baru berisi nilai pixel dari koordinat (1,1) sampai koordinat
(3,3).
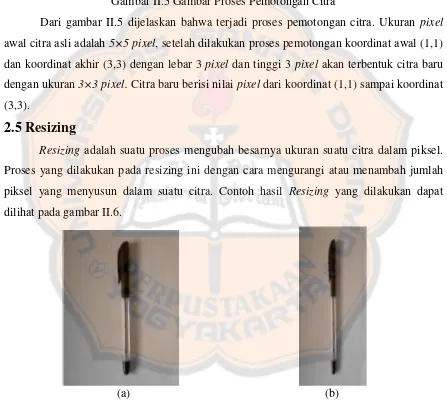
2.5 Resizing
Resizing adalah suatu proses mengubah besarnya ukuran suatu citra dalam piksel.
Proses yang dilakukan pada resizing ini dengan cara mengurangi atau menambah jumlah
piksel yang menyusun dalam suatu citra. Contoh hasil Resizing yang dilakukan dapat
dilihat pada gambar II.6.
(a) (b)
Gambar II.6 (a) Citra Grayscale sebelum di rezising (b) Citra hasil rezising
2.6 Transformasi Geometris Spasial
Citra f didefinisikan sebagai sistem koordinat a(w,z), yang mengalami distorsi
geometris yang menghasilkan citra g dengan sistem koordinat (x,y) maka transformasi
dapat dinyatakan dengan (x,y) = T{(w,z)}[25]. Contoh dalam trasnformasi spasial sebagai
9
Jika (x,y) =T{(w,z)} = (w/2, z/2), distrosi adalah penyusutan f dengan setengah
dimensi spasial seperti ditunjukkan pada gambar II.7.
Gambar II.7 Transformasi Spasial
Bentuk umum yang digunakan pada transformasi spasial adalah affine transform (Wolberg
[1990] ). Transformasi affine dapat ditulis dalam bentuk matrik.
(2.2)
Transformasi ini dapat menskalakan , men-translate, atau menggunting sejumlah
titik, tergantung pada pilihan nilai T. Jenis-jenis transformasi affine terdapat pada tabel 2.1.
Tabel 2.1 Jenis-jenis Transformasi Affine
2.7 Fungsi Jarak
Euclidean
Konteks matematika, jarak euclidean merupakan jarak antara dua titik yang dapat
diukur dan dihasilkan oleh formula teorema pytagoras. Misal jarak antara titik P(x1,x2) dan
titik O(0,0) adalah:
Fungsi jarak Euclidean mempunyai sikap cukup sederhana dan setiap titik dianggap
mempunyai kontribusi yang sama [26].
2.8
Two Dimension
Discrete Sine Transform
(2D DST)
Fungsi DST mengimplementasikan persamaan berikut:
y = dst (x) menghitung transformasi sinus diskrit dari kolom x. Untuk kecepatan performa
terbaik, jumlah baris dalam x harus 2 m - 1, untuk beberapa m bilangan bulat.
y = dst (x, n) memotong vektor x dengan panjang n sebelum transformasi.
Jika x adalah matriks, operasi dst diterapkan untuk setiap kolom.
Fungsi lDST mengimplementasikan persamaan berikut:
x=lDST (y) menghitung transformasi sinus diskrit dari kolom y. Untuk kecepatan performa
terbaik, jumlah baris dalam y harus 2 m - 1, untuk beberapa m bilangan bulat.
x=lDST (y, n) memotong y vektor dengan panjang n sebelum transformasi.
Jika y adalah matriks, operasi lDST diterapkan untuk setiap kolom[27].
Two dimension Discrete Sine Transform adalah suatu proses dalam pengambilan
ciri pada citra yang dapat dihitung dengan menerapkan transformasi 1-D secara terpisah
pada baris dan kolomnya, sehingga rumus dua dimensi DST sebagai berikut:
[28]
(2.7)
2.9 Zig Zag Scanning
Zig-zag scanning yaitu proses yang merubah matriks 8 x 8 hasil proses kuantisasi
kedalam vektor 1 x 28
, dengan pembacaan secara zig-zag scanning. Pada proses zig-zag
scanning ini nilai nol pada frekuensi tinggi cenderung terbaca secara berurutan[29].
Gambar II.8. Path zig-zag scanning
Contoh hasil proses zig-zag scanning yang merubah matrks 8 x 8 hasil proses
kuantisasi ke dalam vector 1 x 64.
-68 4-18 2 -2 -1 0 0 0 -1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
2.10 MATLAB
Matlab (MATrix LABoratory) bahasa pemrograman yang dikembangkan The
Mathwork Inc. dengan fungsi dan karakteristik yang berbeda dengan bahasa pemrograman
11
kebutuhan komputasi teknis, visualisasi dan pemrograman seperti komputasi matematik,
analisis data, pengembangan algoritma, simulasi pemodelan dan grafik perhitungan.
Dalam lingkungan perguruan tinggi teknik, Matlab perangkat standar untuk
memperkenalkan dan mengembangkan penyajian materi matematika, rekayasa dan
keimuan. Di industri, MatLab perangkat pilihan untuk penelitian dengan produktifitas yang
tinggi, pengembangan dan analisanya.
Kegunaan MatLab secara umum adalah sebagai berikut:
a) Matematika dan komputasi,
b) Perkembangan algoritma,
c) Pemodelan, simulasi, dan pembuatan prototype,
d) Analisa data, eksplorasi dan visualisasi
e) Pembuatan aplikasi, termasuk pembuatan antaramuka grafis.
2.10.1 Karakteristik MATLAB
Bahasa pemrogramannya didasarkan pada matriks (baris dan kolom). Matlab lebih
lambat (dibandingkan dengan Fortran atau C) karena bahasanya langsung diartikan namun
pengembangannya lebih cepat. Automatic memory management, pada Matlab tidak harus
mendeklarasikan arrays terlebih dahulu dan tersusun rapi. Dapat diubah ke bahasa C lewat
MATLAB Compiler. Tersedia banyak toolbox untuk aplikasi-aplikasi khusus.
Beberapa kelebihan Matlab jika dibandingkan dengan program lain adalah :
a) Mudah memanipulasi struktur dan perhitungan berbagai operasi matriks meliputi
penjumlahan, pengurangan, perkalian, invers dan fungsi matriks lainnya.
b) Menyediakan fasilitas plot struktur gambar (kekuatan fasilitas grafik tiga dimensi
yang sangat memadai).
c) Script program yang dapat diubah sesuai dengan keinginan user.
d) Jumlah routine-routine powerful yang berlimpah yang terus berkembang.
e) Kemampuan interface (misal dengan bahasa C, word dan mathematica).
f) Dilengkapi toolbox, simulink, stateflow dan sebagainya, serta mulai melimpahnya
source code di internet yang dibuat dalam matlab (contoh toolbox misalnya: signal
processing, control system, neural networks dan sebagainya).
MATLAB diciptakan akhir tahun 1970-an oleh Cleve Moler. MATLAB pertama kali
diadopsi oleh insinyur rancangan kontrol, menyebar secara cepat ke bidang lain dan
digunakan di bidang pendidikan, khususnya dalam pengajaran aljabar linear dan analisis
numerik, serta populer di kalangan ilmuwan yang menekuni bidang pengolahan citra.
12
BAB III
PERANCANGAN
3.1
Gambaran sistem
Gambaran sistem secara keseluruhan yang akan dirancang pada proses pengenalan
alat–alat stasioneri ditunjukan pada gambar III.1.
Gambar III.1. Blok diagram keseluruhan sistem pengenalan alat stasioneri
Proses sistem pengenalan gambar atau objek alat stasioneri yang akan dikenali terdiri
atas software yang berfungsi sebagai user interface. Software tersebut akan dibuat
menggunakan program Matlab yang berfungsi sebagai pusat pengaturan semua proses
pengenalan alat stasioneri, baik mulai dari proses pengambilan gambar hingga mengenali
gambar yang diambil menggunakan webcam.
3.1.1Alat Stasioneri
Alat stasioneri yang akan dipergunakan dalam proses pengenalan ini adalah alat
stasioneri yang biasa kita gunakan dalam kehidupan sehari–hari. Alat–alat stasioneri yang
digunakan hanya sebanyak 9 buah jenis alat stasioneri dari jumlah alat stasioneri yang ada
meliputi: ballpoint, gunting, stabilo, tipe_x, paper klip, steples, buku kecil(note), cutter, dan
pelubang kertas, untuk gambar dan penjelasan telah dijelaskan lebih awal pada bab II pada
dasar teori tentang stasioneri gambar II.1.
13
Ekstrasi ciri
3.1.2 Webcam
Webcam yang digunakan dalam proses pengenalan alat–alat stasioneri adalah webcam
dengan merk Logitech seri c 270. Gambar terdapat pada bab II subbab webcam gambar II.2.
Webcam yang digunakan merk dan seri ini sudah mempunyai dudukan sendiri, webcam ini
juga memiliki software pendukung yang biasa terdapat pada webcam seperti zoom in dan
zoom out sehingga dapat mempermudah pengguna dalam melakukan pengaturan melalui PC.
Pada proses pengambilan citra alat stasioneri menggunakan resolusi 640x480 piksel.
Spesifikasi webcam dapat dilihat pada tabel III.1.
Tabel III.1. Spesifikasi dari Webcam Logitech c 270
High definition video (HD) HD 270p
Photo Quality 3 Megapixel
Video Quality Good
Focus Type Always Focused
Auto Light Correction Standart
3.1.3 Proses pengenalan alat
–
alat stasioneri
Proses pengenalan alat–alat stasioneri ini adalah proses alat stasioneri yang diambil
atau capture untuk dikenali bentuknya. Proses yang akan dilakukan dalam tahap ini terdiri
preprocessing, citra terkoreksi, ekstraksi ciri Discrete Sine Transform (DST), fungsi jarak dan
penentuan keluaran dapat dilihat pada gambar III.2.
Gambar III.2 Blok diagram proses pengenalan alat stasioneri
a. Citra alat–alat stasioneri
Tahap Proses citra ini akan diambil menggunakan webcam, gambar yang dicapture
oleh webcam akan disimpan dalam format jpeg. Proses pengambilan gambar menggunakan
yang fokus. Untuk fokus yang digunakan pada webcam menggunakan fokus normal artinya
pengaturan default yang sudah terpasang pada webcam.
Sebelum dilakukannya proses pengambilan citra alat stasioneri menggunakan webcam,
maka webcam harus dikomunikasikan dan diinisialisasi terlebih dahulu kedalam program
matlab yang dibuat. Dalam menginisialisasikan dan mengkomunikasikan webcam
menggunakan fungsi imaqhwinfo untuk mengetahui nama adaptor dalam webcam tersebut.
Setelah dilakukan inisialisasi sesuai nama adaptornya yaitu „winvideo‟ dengan resolusi kamera
yang digunakan yaitu 640 x 480, maka setelah komunikasi dan inisialisai pada webcam
berhasil.Kemudian untuk perintah capture gambar menggunakan „getsnapshot‟. Berikut
adalah contoh program inisialisasi webcam pada matlab:
imaqhwinfo;
ini memiliki tujuan untuk mempersiapkan citra yang akan dilakukan ekstraksi ciri agar
selanjutnya dapat dilakukan proses berikutnya.
Grayscale dilakukan agar citra alat stasioneri yang telah diambil menggunakan
webcam menjadi keabuan. Hal ini dilakukan agar dapat mempermudah pengolahan citra
dalam proses ekstraksi ciri. Berikut ini adalah contoh program grayscale pada matlab:
I2=imread('pelubang kertas.jpg'); kar=rgb2gray(I2);
Cropping merupakan suatu proses pemotongan bagian–bagian dari citra yang tidak
diperlukan dalam suatu proses pengenalan citra alat stasioneri, seperti background template
dan dari beberapa hasil percobaan yang dilakukan maka akan didapatkan nilai–nilai koordinat
yang sesuai untuk dapat dilakukan proses cropping. Berikut ini adalah contoh program
cropping pada matlab:
I2=imread('pelubang kertas.jpg'); C=imcrop(I2,[205 68 175 351]));
Resizing merupakan suatu tahap yang dilakukan untuk suatu citra yang akan dilakukan
15
yang akan diubah sesuai dengan ukuran piksel yang sama dengan ekstraksi ciri yang
digunakan yaitu Discrete Sine Transform (DST), dengan melakukan beberapa percobaan
didapat yaitu 256x128 piksel. Berikut ini adalah contoh program resizing pada matlab:
I2=imread('pelubang kertas.jpg'); L=imresize(I2, [256 128]);
c. Ekstraksi Ciri
Ekstraksi ciri yang digunakan dalam proses pengenalan alat–alat stasioneri adalah
Discrete Sine Transform Two Dimesion (DST 2-D) bertujuan untuk membagi citra kedalam
blok-blok kecil dengan ukuran tetap yang kemudian dikonveriskan dari domain spasial ke
domain DST. Tahap ekstrasi ciri dilakukan dengan mengevaluasi variasi jumlah koefisien
DST mulai dari 36, 55, 78, 105, 136, dan 171 yang telah disesuaikan dengan koefisien DST
yang digunakan.
d. Fungsi jarak
Proses fungsi jarak bertujuan untuk membandingkan alat–alat stasioneri yang diambil
melalui webcam dengan database yang telah dibuat sebelumnya. Hasil dari proses
membandingkan ini adalah jarak yang akan digunakan dalam proses selanjutnya. Dalam
sistem proses pengenalan ini fungsi jarak yang digunakan adalah fungsi jarak Euclideanlihat
persamaan (2.3-2.5).
e. Penentuan Keluaran
Penentuan keluaran merupakan proses terakhir yang dilakukan dari proses pengenalan
alat–alat stasioneri. Pada tahap ini hasil dari proses pengenalan alat stasioneri akanditentukan
berdasarkan jarak minimum yang diperoleh setelah proses penghitungan fungsi jarak.
3.2
Perancangan
Database
Citra Alat
–
alat stasioneri
Dalam penentuan proses pengenalan alat–alat stasioneri, bahwa dibutuhkan citra yang
akan menjadi suatu acuan yang sering disebut dengan database. Database ini biasanya
memiliki suatu ciri yang sudah diketahui oleh sistem yang telah dibuat. Dalam proses
memperoleh database setiap alat stasioneri yang akan dikenali pada sistem pengenalan alat–
alat stasioneri, dari semua yang telah dijelaskan sebelumnya, penulis memilih 9 jenis dari alat–
alat stasioneri yang ada (ballpoint, gunting, stabilo, tipe_x, paper klip, steples, buku
kecil(note), cutter, dan pelubang kertas). Proses yang harus dilakukan dalam pengambilan
database alat–alat stasioneri melalui proses citra dari alat–alat stasioneri, preprocessing dan
Ekstrasi ciri
Discrete Sine Transform
(DST)
ekstraksi ciri yang digunakan adalah Discrete Sine Transform (DST), proses dalam pembuatan
database dapat dilihat pada gambar III.3
Citra alat
Gambar III.3 Blok diagram Perancangan database citra alat–alat stasioneri
Pada tahap ini proses yang dilakukan dalam pengambilan citra alat–alat stasioneri
terdiri dari 9 alat–alat stasioneri yang digunakan dalam kehidupan sehari–hari yakni: ballpoint,
gunting, stabilo, tipe_x, paper klip, steples, buku kecil(note), cutter, dan pelubang kertas. Jarak
atau ketinggian dalam proses pengambilan gambar antara webcam dengan alat–alat stasioneri
berkisar 50 cm pada jarak ini merupakan jarak terpendek dan terfokus. Intensitas cahaya
yang dipakai sudah mengalami pengaturan terlebih dulu dengan menggunakan bantuan lampu.
Fokus webcam yang digunakan pada proses ini menggunakan fokus normal yang artinya
bahwa pengaturan default yang sudah terpasang pada webcam.
Sampel dari alat–alat stasioneri yang telah didapat akan disimpan dalam suatu fungsi
yang ada dalam sistem pengenalan alat–alat stasioneri. Sehingga kapanpun database alat–alat
stasioneri yang telah dilakukan dapat dipanggil dalam proses fungsi jarak yang ada dalam
sistem pengenalan alat–alat stasioneri.
3.3 Gambar Uji
Gambar uji ini akan dilakukan proses setelah user menekan tombol “Capture”. Hasil
capture diambil dengan posisi alat stasioneri yang sudah diatur secara fix dan cahaya yang
juga sudah diatur tingkat intensitasnya. Proses yang berlangsung meliputi sample alat
stasioneri, preprocessing dan Discrete Sine Transform. Hasil proses tersebut disimpan dan
kemudan diproses kembali untuk mendapatkan hasil pengenalan alat–alat stasioneri secara
real time.
Citra alat stasioneri
Preprocessing Database alat–
17
3.4 Perancangan tampilan GUI Matlab
proses pengenalan alat–alat stasioneri yang dilakukan akan menggunakan GUI pada
MatLab, berikut ini adalah tampilan utama program pada GUI Matlab yang akan digunakan
dalam penelitian dapat dilihat pada Gambar III.4.
Gambar III.4 Gambaran tampilan utama program pengenalan alat–alat stasioneri
Pada tampilan GUI dibuat dengan tujuan agar user dengan mudah dapat
mengoperasikan program serta dapat mengetahui hasil dari sistem pengenalan alat–alat
stasioneri. Beberapa keterangan dari tampilan program dijelaskan pada tabel III.2.
Tabel III.2 Keterangan Tampilan Utama Program
Nama Bagian Deskripsi
Tombol ON Digunakan untuk memulai perekaman citra dari webcam
Tombol Ok Digunakan untuk capture citra alat–alat stasioneri hasil rekaman webcam yang telah mengalami grayscale
Tombol Prepro Digunakan untuk proses preprocessing seperti crop, resizing citra alat–alat stasioneri.
Tombol DST Digunakan untuk melakukan proses ekstraksi ciri pada citra alat–alat stasioneri.
Tombol Tahap Pengenalan Digunakan untuk memulai pengenalan citra alat–alat Stasioneri
Tombol END Digunakan untuk keluar dari sistem pengenalan.
Plot Camera Untuk menampilkan rekaman dan hasil capture citra alat– alat stasioneri pada webcam
Plot preprocessing Untuk menampilkan hasil dari preprocessing citra alat–alat stasioneri
Plot DST Untuk menampilkan hasil ekstraksi ciri citra alat–alat stasioneri
Hasil Pengenalan Untuk menampilkan hasil pengenalan citra setelah di ekstraksi ciri.
3.5 Perancangan Alur Program
Tahap perancangan program pengenalan alat–alat stasioneri dilakukan secara realtime
yang akan dieksekusi pada saat user menjalankan program ini. Saat tampilan utama sudah
terlihat, maka proses pengenalan dapat dilakukan. Pertama kali user menekan tombol “On”
maka program akan mulai melakukan proses perekaman dari webcam. Jika citra alat–alat
stasioneri telah terekam oleh webcam, maka proses pengenalan alat–alat stasioneri bisa
dilakukan dengan menekan tombol „Ok‟, “Prepro”, “DST”, “Pengenalan Alat”. Saat user
menekan tombol “End” maka semua proses pengenalan yang dilakukan akan berhenti. Alur keseluruhan pengenalan alat–alat stasioneri secara realtime dapat dilihat pada gambar 3.5.
Alur pembuatan program secara keseluruhan meliputi perekaman dan pengambilan citra
alat–alat stasioneri menggunakan webcam. Setelah proses capture citra selesai dilakukan,
19
dan citra tersebut akan diekstraksi ciri menggunakan ekstraksi ciri Discrete Sine Transform.
Kemudian citra uji tersebut akan dibandingkan dengan citra database dengan menggunakan
fungsi jarak Euclidean. Setelah dibandingkan dengan menggunakan fungsi jarak Euclidean
maka akan didapat hasil yang mendekati. Setelah hasil dari proses pengenalan alat–alat
stasioneri diperoleh maka user bisa mengakhiri proses dengan menekan tombol “End”.
Masukan (citra alat stasioneri)
Gambar III.5 Alur program keseluruhan
Alur program perekaman dan pengambilan citra alat–alat stasioneri dapat dilihat
pada gambar III.6. Saat user menekan tombol on maka webcam secara otomatis akan berstatus
hidup atau sudah terkoneksi(terhubung) dengan program. Setelah camera hidup maka alat–alat
stasioneri yang digunakan disiapkan pada tempat yang telah disediakan sebelumnya untuk
proses pengambilan citra. Untuk dapat mengambil citra alat–alat stasioneri user dapat
menekan tombol ok.
Masukan (citra alat stasioneri)
Camera hidup
Capture citra
keluaran
Gambar III.6 Diagram blog perekaman dan pengambilan citra
Semua tahap dalam melakukan proses pengambilan citra (capture) terlaksana, lalu
citra yang didapat pada proses pengambilan gambaran memasuki tahap pemrosesan citra
(preprocessing). Tahap preprocessing yang dilakukan meliputi proses grayscale, cropping dan
resizing. Proses resizing dilakukan dengan ukuran matrik 256x128. Diagram blok pemrosesan
citra dapat dilihat pada gambar III.7.
Keluaran capture citra
grayscale
cropping
Masukan (hasil) Resizing citra
21
User selesai melakukan proses pemrosesan citra (preprocessing), langkah selanjutnya
dalam proses pengenalan yang dilakukan adalah proses ekstraksi ciri dengan menggunakan
Discrete Sine Transform two dimesion (DST 2-D) dengan tujuan untuk membagi citra matrik
256x128 ke dalam blok-blok kecil dengan ukuran tetap yang kemudian dikonveriskan dari
domain spasial ke domain DST dan membentuk lapisan DST. Untuk mengetahui nilai dari
lapisan DST tersebut, maka proses yang dilakukan adalah zigzag scan dengan melakukan
evaluasi dari tiap lapisan DST dengan nilai koefisien 36, 55, 78, 105, 136, dan 171. Hasil dari
nilai koefisien yang terbaik adalah nilai ekstraksi ciri yang diperloeh. Diagram blok ekstraksi
ciri dapat dilihat pada gambar III.8.
Masukan (hasil)
Citra input
DST
Hitung nilai absolut DST
Keluaran (ekstrasi ciri) Zigzag scanning
Gambar III.8 Diagram blok ekstraksi ciri
Untuk perhitungan DST yang terdapat pada diagram blok menggunakan persamaan 2.6
terdapat pada Bab II.
Nilai ekstraksi ciri yang telah dilakukan akan diperoleh dari data citra masukkan
kemudian akan dibandingkan dengan nilai ekstraksi ciri pada database menggunakan fungsi
jarak Euclidean. Jarak Euclidean proses mencari selisih data yang akan dibandingkan dengan
data dari database dengan mencari nilai yang paling minimum. Database terdiri dari 9 citra
alat–alat stasioneriseperti ballpoint, gunting, stabilo, tipe_x, paper klip, steples, buku
kecil(note), cutter, dan pelubang kertas. Diagram blok fungsi jarak euclidean dapat dilihat
pada gambar III.9.
Masukan (ekstrak ciri)
Database Hitung jarak J1..J9 Nilai ekstrasi
ciri citra masukan
Keluaran (jarak)
Gambar III.9 Diagram blok fungsi jarak
Untuk perhitungan fungsi jarak Euclidean yang terdapat pada diagram blok menggunakan
persamaan jarak Euclidean menggunakan persamaan 2.5 pada Bab II.
Maka nilai jarak minimun antara nilai ekstraksi ciri citra input dengan nilai ekstraksi
ciri pada database diperoleh. Lalu hasil dari nilai jarak minimum tersebut akan ditampilkan
berupa teks (ballpoint, gunting, stabilo, tipe_x, paper klip, steples, buku kecil(note), cutter,
dan pelubang kertas). Alur program penentuan hasil pengenalan dapat dilihat pada gambar
III.10.
Masukan (hitung jarak)
Keluaran Keluaran citra =
jarak minimum
23
BAB IV
HASIL DAN PEMBAHASAN
Pada bab empat, progran yang telah dibuat akan dilakukan proses pengujian agar
dapat diketahui apa program bekerja dengan baik dan sesuai dengan perancangan. Hasil
yang diperoleh pada pengujian dalam rupa data–data yang memperlihatkan bahwa program
yang telah dirancang berjalan dengan baik. Analisa terhadap proses kerja dapat digunakan
untuk menarik kesimpulan dari apa yang disajikan dalam penyelesaian tugas akhir.
4.1 Pengujian Program Pengenalan Alat–alat Stasioneri Secara RealTime
Menggunakan Ekstraksi Ciri DST.
Tahap pengujian program bertujuan untuk mengetahui program yang telah dibuat
dapat bekerja sesuai dengan harapan yang telah di rancang sebelumnya. Pada proses
pengujian program ini menggunakan computer dengan spesifikasi berikut:
Prosesor : Intel (R) Core(TM) i5-2430M [email protected] (4CPUs) ,~2.4 GHz.
RAM :4 GBDDR3 // Hdd 500 GB // DVDRW multi
Langkah–langkah untuk menjalankan program pengenalan alat stasioneri sebagai berikut:
1. Click dua kali icon matlab seperti gambar 4.1 berikutini:
Gambar 4.1 Gambar Icon Matlab
2. Setelah menekan dua kali gambar 4.1 sebelum masuk halaman utama matlab maka
akan terlihat seperti gambar 4.2.
Gambar4.2 Gambar sebelum masuk halaman utama matlab
3. Jika gambar 4.2 muncul tunggu sesaat, lalu user akan masuk pada Command
Window sebelum masuk pada halaman utama program seperti gambar 4.3.
Gambar 4.3 Gambar command window matlab
4. Setelah masuk halaman Command window matlab current directory harus
disesuaikan dengan directory tempat program disimpan, ketik guiq pada command
window, user akan masuk ke halaman utama pengenalan seperti gambar 4.4.
Gambar 4.4 Tampilan utama guiq proses pengenalan
5. Setelah melakukan tahap ke empat user melakukan proses pengenalan dengan
menekan tombol ON untuk menampilkan proses video pada webcam, jika video
sudah muncul user dapat menekan tombol Ok untuk melakukan proses pencuplikan
gambar video untuk dilakukan proses berikutnya lihat gambar 4.5 dan 4.6 berikut
25
Gambar 4.5 Proses tampilan ketika tombol ON ditekan
Gambar 4.6 proses tampikan ketika tombol Ok ditekan
6. Hasil mencuplik didapat, selanjutnya dengan menekan tombol “Prepro” didapat
hasil preprocessing seperti cropping dengan memotong bagian dari citra, resizing
dari citra alat stasioneri yang di capture sebelumnya dan yang ditampilkan hasil
cropping yang terlihat pada gambar 4.6.
Gambar 4.7 Proses tampilan ketika tombol “Prepro” ditekan
7. Preprocessing sudah dilakukan user menekan tombol “DST” untuk dapat
mengetahui hasil ektraksi ciri seperti pada gambar 4.7.
Gambar 4.8 Tampilan setelah tombol “DST” ditekan
8. Proses terakhir untuk mengetahui hasil pengenalan user akan menekan tombol
“tahap pengenalan” dan hasilnya akan muncul dalam bentuk teks seperti gambar 4.9,
tombol “end” ditekan apabila user akan keluar dari program.
Gambar 4.9 Tampilan setelah tombol “TahapPengenalan” ditekan
Hasil pengujiangui proses pengenalan alat stasioneri dilakukan secara realtime, bisa
dilihat bahwa hasil pengujian tampilan program yang dilakukan mengindikasikan sistem
beker`ja sesuai dengan perancangan sehingga dapat digunakan untuk mencari dan
menentukan nilai parameter yang terbaik untuk digunakan dalam proses pengenalan alat
stasioneri secara realtime. Keseluruhan program terlampir pada lampiran L1–L4.
4.2
PenentuanNilai Parameter
Proses dilakukan setelah pengujian serta tampilan program bekerja dengan baik.
Dalam menentukan nilai parameter yang digunakan dilakukan proses percobaan jumlah
variasi koefisien DST sesuai dengan perancangan adalah 36, 55, 78, 105, 136, dan 171.
Tiap koefisien DST dilakukan percobaan sebanyak 5 kali setiap alat stasioneri, koefisien
DST yang memiliki tingkat pengenalan paling baik100% digunakan dalam proses yaitu
171, percobaan dapat dilihat pada tabel 4.1 dan selengkapnya dapat dilihat pada lampiran
27
Tabel 4.1 pengujian alat stasioneri koefisien DST 36
Alat Stasioneri Database Jarak Minimum Hasil Pengenalan
Ballpoint Stabilo 1.8520 Dikenali sebagai Ballpoint
Cutter 1.6565
Pelubang kertas 2.7778
Tipe_x 2.3144
Ballpoint 1.1410
Steples Stabilo 1.5741 Dikenali sebagai Stabilo
Cutter 1.8765
Pelubang kertas 2.6787
Tipe_x 1.8626
Data percobaan lampiran L5 bisa dilihat pengaruh jumlah koefisien DST terhadap
tingkat pengenalan, semakin besar nilai koefisien DST yang digunakan dalam melakukan
pengenalan, semakin baik pula tingkat pengenalannya. Hal ini diperlihatkan pada gambar
4.9. Nilai koefisien DST yang semakin besar, menyebabkan makin banyaknya koefisien
DST yang digunakan untuk membedakan antara citra alat stasioneri yang satu dengan yang
lainnya. Ini akan makin mudah dibedakan antara citra alat stasioneri yang satu dengan
lainnya. Kejadian inilah yang menyebabkan makin naiknya tingkat pengenalan.
Koefisien DST 36
Gambar 4.10 Pengaruh Koefisien DST terhadap Hasil pengenalan
Koefisien DST 55
Gambar 4.10 (Lanjutan) Pengaruh Koefisien DST terhadap Hasil pengenalan
Koefisien DST 78
Gambar 4.10 (Lanjutan) Pengaruh Koefisien DST terhadap Hasil pengenalan
Dari gambar 4.9 untuk membedakan citra alat stasioneri yang satu dengan lainnya
dilakukan dengan mencari nilai fungsi jarak antara citra alat stasioneri yang satu dengan
citra lainnya, semakin besar nilai fungsi jarak semakin besar pula tingkat diskriminasinya,
sehingga makin mudah dalam membedakan citra alat stasioneri yang satu dengan citra
lainnya. Dari gambar 4.9 nilai fungsi jarak dicari dengan cara data matrik hasil ekstraksi
ciri tipe_x dikurangi data matrik hasil ekstraksi ciri stabilo, hasilpengurangan dikuadratkan
agar data matrik yang bernilai negatif menjadi positif, dan hasil dari kuadrat tersebut
dijumlahkan dan hasil penjumlahan tersebut adalah nilai fungsi jarak dari citra tipe_x
29
gambar 4.9 untuk koefisien DST 36= 1.6755x103, koefisien DST 55= 1.7537x103,
koefisien DST 78=1.8083x103. Dapat disimpulkan makin besar koefisien yang digunakan
makin besar nilai fungsi jarak antara citra alat stasioneri satu dengan citra lainnya.
Data hasil percobaan (Tabel percobaan pada lampiran L5) dapat digunakan untuk
mencari persen pengenalan melalui perhitungan dari setiap koefisien DST tabel data hasil
percobaan (lampiran L5) dan grafik dari pengaruh koefisien DST terhadap tingkat
pengenalan. Untuk mendapat tingkat persen pengenalan digunakan rumus:
Tingkat pengenalan = (4.1)
Ket : = jumlah alat stasioneri yang dikenali dan benar.
n = banyaknya percobaan
Berdasarkan rumus diatas tingkat pengenalan alat stasioneri dapat diketahui dalam
tabel 4.2.
Tabel 4.2.Pengaruh Koefisien DST terhadap tingkat pengenalan Koefisien DST Tingkat pengenalan (%)
36 86,67
Hasil perhitungan dan tabel 4.2 dapat disimpulkan nilai parameter yang terbaik
dalam melakukan proses pengenalan alat stasioneri secara realtime, yaitu koefisien DST
171 karena mampu mengenali alat stasioneri dengan tingkat pengenalan sebesar 100%.
4.3
PengujianNilai Parameter
Pengujian dilakukan setelah nilai parameter ditentukan dan nilai parameter
koefisien DST yang digunakan adalah koefisien DST 171 sesuai dari hasil penentuan nilai
parameter. Pengujian bertujuan untuk mengetahui nilai parameter yang ditentukan dapat
bekerja dengan baik dalam pengenalan alat stasioneri secara realtime, pengujian parameter
dilakukan dengan melakukan pengujian sebanyak 5 kali setiap alat stasioneri, data
pengujian parameter terdapat pada tabel pengujian parameter lampiran L8.
Tabel hasil pengujian (lampiran L8) diketahui nilai parameter yang sudah
ditentukan mampu mengenali alat stasioneri dengan benar dengan tingkat pengenalan
100% pada pengujian nilai parameter, sehingga dapat disimpulkan bahwa koefisien DST
171 baik digunakan dalam melakukan pengenalan alat stasioneri secara realtime.
4.4
Pengujian Saat Objek Salah
Pengujian dilakukan untuk mengetahui saat objek alat stasioneri yang digunakan
dalam pembuatan Tugas akhir ini di tempatkan tidak sesuai dengan yang telah ditentukan
misalnya saat alat stasioneri mengalami pergeseran, dibalik dan diganti dengan ukuran
yang berbeda. Saat alat stasioneri yang digunakan dalam proses pengenalan mengalami
pergeseran terdapat lima (5) alat stasioneri yang dikenali namun hasilnya salah. Pada saat
alat stasioneri dibalik posisinya tidak sama saat pembuatan database terdapat satu (1) alat
stasioneri yang dikenali namun salah hasilnya. Saat keadaan alat stasioneri diganti dengan
ukuran yang berbeda dengan database maka terdapat dua (2) alat yang dikenali namun
hasilnya salah.
Tabel 4.3 pengujian saat alat stasioneri posisi tidak tepat atau digeser
Alat Stasioneri Database Jarak Minimum Hasil Pengenalan
Tipe_x Stabilo 1.2306 Dikenali sebagai Stabilo
Cutter 1.4820
Pelubang kertas 2.2331
Tipe_x 1.7516
Tabel 4.4 pengujian saat alat stasioneri posisi dibalik
Alat Stasioneri Database Jarak Minimum Hasil Pengenalan
Ballpoint Stabilo 1.4520 Dikenali sebagai Ballpoint
Cutter 1.6232
Pelubang kertas 2.5040
Tipe_x 2.2781
Ballpoint 1.2935
Tabel 4.5 pengujian saat alat stasioneri diganti dengan ukuran yang berbeda
Alat Stasioneri Database Jarak Minimum Hasil Pengenalan
Tipe_x Stabilo 1.2306 Dikenali sebagai Stabilo
digunakan yaitu fungsi jarak Euclidean dengan mencari nilai paling minimum antara nilai
citra masukan yang akan dibandingkan dengan database dan diperoleh nilai paling
minimum. Data lengkap dapat dilihat pada lampiran L9-L13.
4.5 Analisis program
4.5.1 Proses perekaman citra dan capture citra.
Citra yang akan diproses untuk pengambilan menggunakan webcam dan webcam
harus diinisialisasikan dahulu dengan fungsi imaqhwinfo untuk mengetahui nama adaptor
webcam yaitu Winvideo dengan resolusi 640x480, untuk capture menggunakan „getdata‟
31
Gambar 4.11 sub program perekaman dan Capture 4.5.2 Tahap Preprocessing.
Tahap ini terdiri atas proses cropping dan resizing. Cropping dilakukan untuk
memotong bagian citra yang tidak diperlukan dengan cara memotong bagian citra.
Resizing digunakan untuk mengubah citra dari resolusi awal 640x480 menjadi citra
256x128 seperti gambar 4.12.
Gambar 4.12 sub program Preprocessing 4.5.3 Proses ekstraksi ciri
Tahap ini digunakan untuk memperoleh ciri dari citra yang di akan dikenali.
Ekstraksi ciri yang digunakan adalah ekstraksi ciri Two Dimension Discrete Sine
Transform seperti gambar 4.13.
Gambar 4.13 sub program ekstraksi ciri
4.5.4 Proses perhitungan jarak Euclidean.
Dalam tahap ini bahwa data masukan dalam rupa citra alat stasioneri dengan data
base yang telah dibuat akan dilakukan proses pencocokan. Proses akan dilakukan dengan
melakukan perhitungan jarak dengan menggunakan fungsi jarak euclidean dengan mencari
nilai paling minimum dari semua database yang telah dibuat sebelumnya seperti gambar
4.14.
Gambar 4.14 sub program jarak Euclidean
4.6
Keterbatasan Metodologi
Pembuatan tugas akhir pengenalan secara realtime terdapat keterbatasan
metodologi diantaranya adalah:
1. Jarak webcam dengan alat stasioneri dan posisi alat stasioneri dibuat fix dengan
jarak berkisar 50cm, jika tidak fix maka akan mempengaruhi proses cropping.
2. Intensitas cahaya dalam proses pengenalan alat stasioneri dilakukan secara
realtime sama pada waktu pembuatan database yaitu Laboratorium Teknik
Tenaga Listrik. Cahaya yang lebih atau kurang terang akan mempengaruhi citra
hasil proses grayscaling yang digunakan untuk proses pengenalan.
3. Cropping tidak dilakukan secara otomatis karena keterbatasan metodologi,
cropping dilakukan secara manual dengan memotong bagian citra, yaitu
koordinat awal yang merupakan awal koordinat bagi citra hasil pemotongan dan
koordinat akhir yang merupakan titik koordinat akhir dari citra hasil
pemotongan citra alat stasioneri yang akan di crop. Apabila cropping tidak

![Gambar II.2. webcam[17]](https://thumb-ap.123doks.com/thumbv2/123dok/1811360.2099871/23.595.88.525.258.538/gambar-ii-webcam.webp)
![Gambar II.3. Intensitas grayscale [23]](https://thumb-ap.123doks.com/thumbv2/123dok/1811360.2099871/25.595.93.501.272.490/gambar-ii-intensitas-grayscale.webp)