BAB IV
TEGANGAN, REGANGAN, DAN DEFLEKSI
4.1. Tegangan
Salah satu masalah fundamental dalam mechanical engineering adalah
menentukan pengaruh beban pada komponen mesin atau peralatan. Hal ini sangat essensial dalam perancangan mesin karena tanpa diketahuinya intensitas gaya di dalam elemen mesin, maka pemilihan dimensi, material, dan parameter lainnya tidak dapat dilakukan. Intensitas gaya dalam pada suatu benda didefinisikan sebagai tegangan
(stress). Gambar 4.1 menunjukkan sebuah benda yang mendapat beban dalam bentuk gaya-gaya. Untuk mengetahui intensitas gaya di dalam benda maka dapat dilakukan dengan membuat potongan imaginer melalui titik O. Untuk menjaga prinsip kesetimbangan, tentu pada penampang potongan imajiner tesebut terdapat gaya-gaya dalam yang bekerja. Kalau penampang imaginer tersebut dibagi menjadi elemen-elemen yang sangat kecil ∆A, maka pada masing masing ∆A tersebut akan bekerja gaya dalam sebesar ∆F.
Definisikan vektor tegangan (Stress vector)
dA
dF
A
P
0 AΔ
≈
Δ
=
→ Δlim
T
(4.1)Vektor tegangan ini adalah intensitas gaya pada seluruh penampang dan arahnya tidak harus sama antara satu dengan yang lain. Dari definisi ini jelas bahwa tegangan pada suatu elemen mesin terjadi karena adanya beban yang bekerja pada elemen tersebut.
4.2. Pengaruh Beban Terhadap Kondisi Tegangan
Dalam analisis elemen mesin masing-masing jenis beban perlu dipelajari pengaruhnya terhadap tegangan, regangan, maupun deformasi yang ditimbulkan. Berdasarkan lokasi dan metoda aplikasi beban serta arah pembebanan, beban dapat diklasifikasikan menjadi : beban normal, beban geser, beban lentur, beban torsi, dan beban kombinasi. Pengaruh jenis-jenis pembebanan tersebut terhadap tegangan, regangan maupun defleksi elemen mesin dapat ditentukan secara analitik untuk komponen yang sederhana. Sedangkan untuk komponen yang kompleks, dapat digunakan metoda numerik maupun metoda eksperimental.
4.2.1. Kasus I : Beban uniaksial
Pembebanan uniaksial pada suatu elemen mesin sering terjadi pada suatu elemen mesin seperti ditunjukkan pada gambar 4.2. Tegangan yang terjadi pada elemen yang mendapat beban uniaksial adalah tegangan normal yang arahnya selalu tegak lurus
penampang. Distribusi tegangan normal akibat ganya uniaksial dapat diasumsikan terdistribusi secara seragam. Formula sederhana untuk menghitung tegangan normal akibat beban uniaksial adalah
A
P
=
σ
(4.2)Gambar 4.2 Distribusi tegangan normal akibat beban uniaksial
Untuk kondisi elastis linear, karakteristik beban dan deformasi pada beberapa jenis material ditunjukkan pada gambar 4.3.
Gambar 4.3Karakteristik beban – deformasi benda elastis linear
Dari definisi tegangan dan regangan maka hubungan tegangan regangan elemen yang mengalami beban uniaksial dapat diformulasikan menjadi Hukum Hooke satu dimensi.
ε
=
σ
E
;L
δ
=
ε
(4.3)Perpindahan yang terjadi pada elemen yang mengalami beban uniaksial diilustrasikan pada gambar 4.4. Formulasi untuk menghitung perpindahan dapat dilakukan dari definisi deformasi
δ
=
u
B−
u
A dan dengan menggunakan hukum Hooke, maka dapat diturunkan bahwaAE
FL
)
u
(u
δ
=
B−
A=
(4.4)Gambar 4.4Gaya dan perpindahan pada elemen yang mengalami beban uniaksial
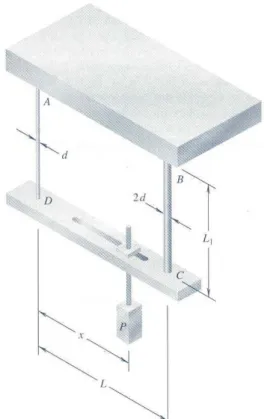
Studi Kasus 1:
Pada gambar E.1, batang rigid DHC digantung pada kawat elastis AD dan BC (modulus elastisitas E, dimensi pada gambar). Beban P bekerja pada H. Berapa jarak x supaya batang rigid tetap horisontal? (Abaikan massa batang rigid dan kawat)
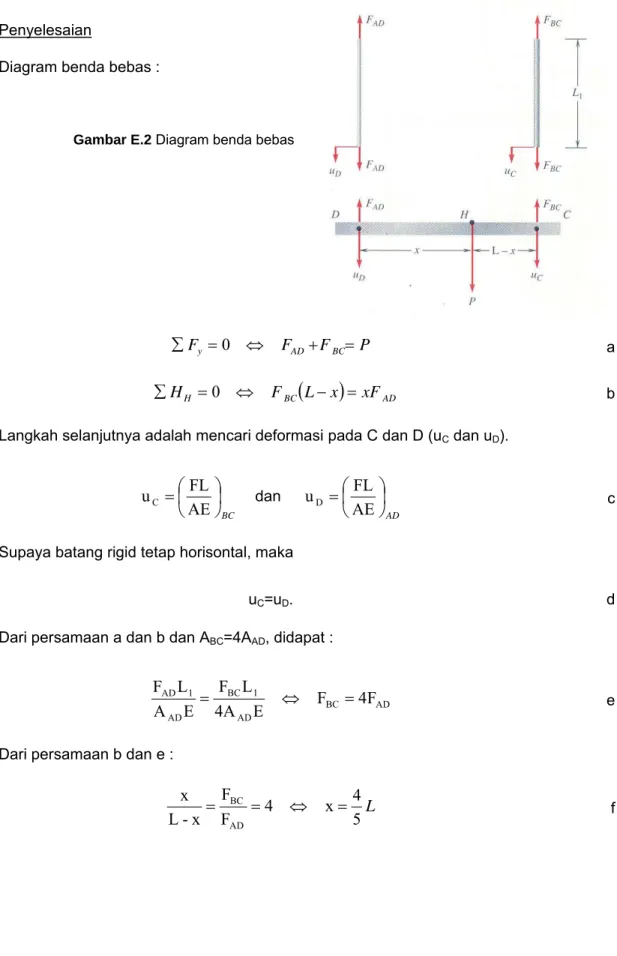
Penyelesaian
Diagram benda bebas :
Gambar E.2 Diagram benda bebas
P F F Fy = ⇔ AD+ BC= ∑ 0 a ∑HH =0 ⇔ FBC
(
L−x)
= xFAD bLangkah selanjutnya adalah mencari deformasi pada C dan D (uC dan uD).
BC ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = AE FL uC dan AD ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = AE FL uD c
Supaya batang rigid tetap horisontal, maka
uC=uD. d
Dari persamaan a dan b dan ABC=4AAD, didapat :
AD BC AD 1 BC AD 1 AD F 4F E 4A L F E A L F = ⇔ = e Dari persamaan b dan e :
L 5 4 x 4 F F x -L x AD BC = ⇔ = = f
4.2.2. Kasus II : Beban torsi
Beban torsi akan menimbulkan efek “puntiran” atau deformasi sudut (angular deformation) seperti ditunjukkan pada gambar 4.5. Poros adalah salah satu contoh elemen mesin yang mengalami beban puntir. Tegangan yang terjadi akibat beban torsi adalah tegangan geser dengan distribusi yang bervariasi linear dari titik tengah penampang ke permukaan.
Tegangan geser yang terjadi pada suatu elemen poros pada jarak r dari sumbu dan diakibatkan adanya torsi T, diformulasikan sebagai berikut :
J Tr
τ= (4.5)
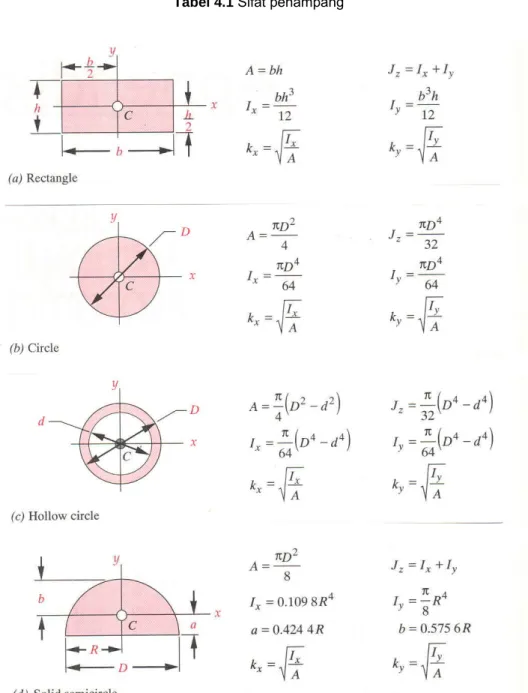
J adalah momen inersia polar, besarnya tergantung pada dimensi dan bentuk penampang. Nilai J untuk berbagai macam penampang bisa dilihat pada tabel 4.1.
Gambar 4.5Poros penampang lingkaran dengan panjang L dan jari-jari a, diputar dengan torsi T
Elemen yang diberi beban torsi akan mengalami tegangan geser sebesar τ yang akan mengakibatkan terjadinya regangan geser sebesar γ, hubungannya seperti pada formulasi Hukum Hooke untuk tegangan geser berikut :
G
γ
dengan G=modulus geser,
(
1 υ)
2 E G + =Deformasi sudut yang diakibatkan adanya torsi bisa dilihat pada gambar 4.6. Besarnya adalah : GJ TL = Φ − Φ = Φ B A (4.7)
Gambar 4.6Sebuah poros dengan panjang L yang diberi beban torsi T
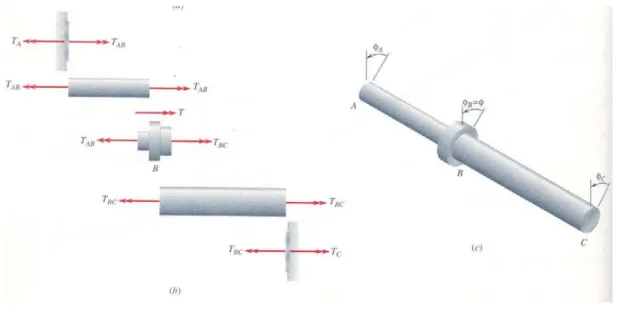
Studi Kasus 2:
Momen torsi bekerja pada poros 2 segmen, segmen AB dan BC seperti pada gambar. Masing-masing segmen berbeda material dan momen inersia polar. Tentukan :
Gambar E.3 Contoh soal 2
a. momen puntir masing-masing segmen,
b. deformasi sudut karena beban torsi,
Penyelesaian
Gambar E.4 Diagram benda bebas
Pada bagian B :
T T
TAB = BC + a
Dari diagram benda bebas sebelah kanan :
(
B A)
AB AB L Φ Φ GJ T ⎟ − ⎠ ⎞ ⎜ ⎝ ⎛ = b(
C B)
BC BC Φ Φ L GJ T ⎟ − ⎠ ⎞ ⎜ ⎝ ⎛ = cKarena poros fix di A dan C, maka :
0 = Φ =
ΦA C d
Dari persamaan a, b, c dan d, didapat :
( ) ( )
AB GJL BC LGJ +
= T
ΦB e
Dari b, c, dan e didapat momen torsi tiap segmen :
( )
( ) ( )
AB AB BC AB L GJ L GJ L GJ T T + = dan( )
( ) ( )
AB AB BC BC L GJ L GJ L GJ T -T + = fTanda minus pada TBC menandakan bahwa arahnya terbalik dari gambar diagram benda
bebas.
4.2.3. Kasus III : Beban bending
Contoh sederhana pembebanan bending pada beam ditunjukkan pada gambar 4.7. Tegangan yang terjadi pada pembebanan momen bending M yang diakibatkan oleh beban P adalah tegangan normal dan tegangan geser. Besarnya tegangan normal yang terjadi bervariasi semakin membesar menjauhi sumbu netral dan besarnya adalah:
z x
I My
σ = (4.8)
y adalah jarak titik yang ditinjau dari sumbu netral, I adalah momen inersia, sedangkan A adalah luas penampang melintang beam. Nilai I untuk berbagai macam penampang bisa dilihat pada tabel 4.1.
Gambar 4.7Beam dengan beban bending
Tegangan normal dan tegangan geser akibat beban bending ditunjukkan pada gambar 4.8. Beban bending mengakibatkan terjadinya regangan seperti pada gambar 4.9. Besar regangan pada elemen beam berjarak y dari sumbu netral adalah :
Gambar 4.8Beam dengan beban bending
Gambar 4.9Regangan yang terjadi pada beam
z x
EI My
ε =− (4.9)
4.2.4. Kasus IV : Beban geser
Beban geser akan menimbulkan tegangan geser pada bidang yang sejajar dengan arah bekerjanya beban. Beban geser bisa ditemui pada elemen mesin paku keling seperti pada gambar 4.10. Diasumsikan beban geser terdistribusi merata pada bidang kerja, sehingga tegangan yang terjadi pada bidang itu nilainya seragam:
Gambar 4.10Paku keling yang dibebani dengan beban geser
Tegangan geser yang diakibatkan adanya beban P pada sebuah paku keling dengan luas penampang A, diformulasikan sebagai berikut :
2A P A 2 P τ= = (4.10)
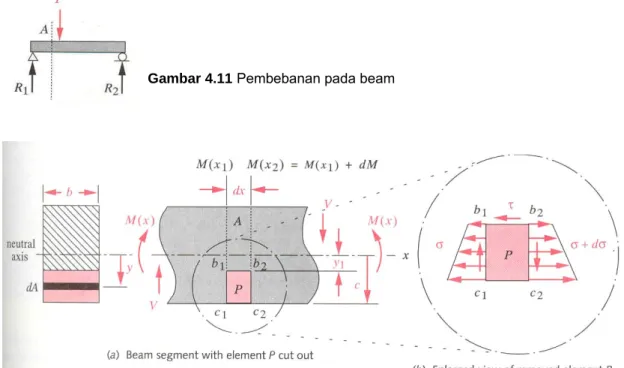
Khusus pada pembebanan transversal pada beam, seperti pada gambar 4.11,
akan terjadi kombinasi tegangan bending dan tegangan geser.
Gambar 4.11Pembebanan pada beam
Gambar 4.12Segmen beam
Dari gambar 4.12 di atas, besarnya tegangan geser dihitung :
(
)
∫
∫
∫
= − + = = c y c y c y ydA dA I My dA I y dM M 1 1 1 1x 2x xy Ib 1 dx dM τ dx b τ -F F F (4.11)dengan b adalah tebal penampang. dM/dy adalah gaya geser pada setiap titik, V, sehingga :
∫
= c y ydA 1 xy Ib V τ (4.12) dengan =∫
c y ydA 1 Q , maka Ib VQ τxy = (4.13)Untuk beam dengan penampang persegi panjang :
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = = =
∫
∫
2 1 2 1 1 2 4 Q ydA b ydy b h y c y c y (4.14) Sehingga : ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = 2 1 2 4 2 y h I Vτ
(4.15)Tegangan geser bervariasi seperti pada gambar 4.13. Pada y1=h/2, τ=0. Pada y1=0, τmax=Vh2/8I. Untuk penampang persegi panjang, I=bh3/12, sehingga :
A V 2 3 max =
τ
(4.16)Gambar 4.13Distribusi tegangan geser pada beam persegi panjang
Studi Kasus 3:
Geometry “brake lever” sepeda diberikan pada gambar E.5. Rata-rata tangan manusia dapat menimbulkan gaya cengkeram sekitar 267 N. Tangan yang sangat kuat dapat memberikan gaya cengkeram sekitar 712 N. Diameter pin pivot 8 mm. Hitung tegangan pada posisi kritis pada brake lever.
Gambar E.5 Contoh soal 3
Idealisasi :
Ö Kegagalan terjadi pada 2 lubang pin dan pada pangkal kantilever (brake lever)
Ö Penampang berebentuk lingkaran
Analisis :
a. Handle dimodelkan sebagai batang kantilever dengan diameter 14.3 mm, seperti pada gambar:
a b
Gambar E.6 Model handle sebagai batang kantilever
Dari studi kasus 3, bab 3, didapat R1=712 dan M1=54.6 Nm.
Gambar E.7 Diagram benda bebas
Tegangan tarik bending pada pangkal kantilever akan maksimal pada sisi paling luar (titik P), nilainya :
(
)
MPa m m Nm 190 64 0143 . 0 2 0143 . 0 6 . 54 I My σ 4 4 z x = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = =π
ac. Dihitung tegangan geser :
( )
(
)
MPa mm N 6 4 3 . 14 3 712 4 3A 4V 2 2 xy = = =π
τ
bTegangan geser maksimal terjadi pada sumbu netral (titik Q). Tegangan utama pada sisi luar bagian atas σ1=σx=190 MPa, σ2=σ3=0, sehingga dari lingkaran Mohr :
τmax=95 MPa.
Gambar E.8 Lingkaran Mohr
d. Dilakukan juga pengecekan pada lokasi lain yang memungkinkan terjadinya kegagalan, yaitu pada dua lubang pin. Material di antara 2 lubang harus di dicek terhadap 3 mode kegagalan, yaitu tegangan bearing, tegangan geser langsung dan
e. Tegangan bearing yang terjadi adalah tekan, bekerja pada area proyeksi lubang.
(
)
2bearing dia ketebalan 8 2 6.4 102mm
A = × = × × = c MPa A F 30 102 2993 bearing 12 bearing = = =
σ
df. Kegagalan tearout bisa dilihat pada gambar :
Pada kasus ini, kegagalan terjadi pada area dengan ketebalan 4(6.4) mm dengan lebar 7.1 mm.
(
)
2tearout lebar ketebalan 7.1 4 6.4 181mm
A = × = × × = e MPa A F 17 181 2993 tearout 12 tearout = = =
τ
fg. Tegangan bearing dan tearout yang terjadi kecil.
h. Kegagalan yang terjadi karena beban kabel adalah pada bagian C pada gambar
E.7, Bagian ini dimodelkan sebagai batang kantilever dengan lebar penampang (25-5)/2=10 mm dan lebar 5 mm (konservatif tanpa mempertimbangkan adanya kenaikan lebar karena adanya jari-jari lubang). Lengan momen diasumsikan sama dengan jari-jari pin, 4 mm. Gaya yang bekerja pada setengah lebarnya adalah setengah gaya total. Tegangan bending yang terjadi sebesar :
( )
137MPa 12 5 10 4 2 5 2 2858 I My σ 3 z x = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = = gTegangan geser karena pembebanan transversal pada sumbu netral :
(
)
( )( )
76MPa 5 10 2 2858 3 2A 3V xy = = =τ
h4.3. Tensor Tegangan 3D
Vektor tegangan T yang bekerja pada bidang potongan imajiner dapat diuraikan sebagai berikut :
k
j
i
T
=
σ
x+
τ
xy+
τ
xz (4.17)Gambar 4.14 Komponen tegangan pada bidang x-y
Komponen tegangan yang bekerja tegak lurus terhadap bidang disebut tegangan
normal, sedangkan komponen yang bekerja dalam arah bidang kerja disebut tegangan geser.
Jika potongan imajiner dilakukan untuk bidang-bidang yang lain maka akan
didapatkan elemen tegangan 3 dimensi seperti ditunjukkan pada gambar 4.15.
Komponen-komponen tegangan yang lengkap untuk tiga dimensi adalah merupakan
tensor orde 2. Tensor tegangan untuk elemen tiga dimensi dapat dituliskan dalam bentuk
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = z zy zx yz y yx xz xy x ij σ τ τ τ σ τ τ τ σ σ (4.18)
Gambar 4.15 Komponen tegangan tiga dimensi
Subskrip untuk tegangan normal adalah menandakan arah tegangan. Sedangkan untuk tegangan geser subskrip pertama menandakan bidang kerja tegangan, dan subskrip kedua menandakan arah tegangan. Konvensi tanda untuk tegangan adalah sebagai berikut :
Ö Tegangan normal berhaga positif jika arahnya keluar dari bidang (tarik), dan berharga negatif untuk sebaliknya
Ö Tegangan geser berharga positif jika :
o Pada bidang positif searah sumbu positif o Pada bidang negatif searah sumbu negatif.
4.4. Tegangan Bidang (Plane Stress)
Umumnya elemen mesin mengalami kondisi tegangan tiga dimensi, tetapi untuk beberapa kasus terdapat elemen yang bisa diidealisasikan dengan kondisi tegangan dalam bidang dua dimensi. Untuk kondisi plane stress ini, semua tegangan tegak lurus bidang berharga nol (σz = τxz = τyz = 0). Contohnya adalah elemen pelat yang mendapat beban pada bidang pelat sendiri, tegangan pada elemen tipis seperti straingage, dll. Untuk tegangan bidang x-y, tensor tegangan dapat disederhanakan menjadi
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = y yx xy x ij τ σ τ σ σ (4.19)
Gambar 4.16 Elemen tegangan bidang (plane stress x-y)
4.5. Tegangan Utama
Untuk menentukan kekuatan suatu elemen mesin maka diketahui tegangan maksimum yang terjadi pada elemen tersebut. Nilai atau besar suatu tegangan pada elemen tegangan sangat tergantung pada orientasi dari sistem koordinat. Pada suatu orientasi tertentu terdapat kondisi dimana tegangan normal berharga maksimum dan
Gambar 4.17 Tegangan utama tiga dimensi
semua tegangan geser berharga nol. Kondisi ini disebut dengan Principal stress atau tegangan utama. Nilai tegangan utama dan orientasinya dapat ditentukan dari
persamaan karakteristik berikut :
0 = ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − z y x p y zy zx yz p y yx xz xy p x n n n
σ
σ
τ
τ
τ
σ
σ
τ
τ
τ
σ
σ
(4.20)dimana nx, ny, nz adalah arah cosinus vektor n (normal terhadap principal plane). Supaya
persamaan (4.20) memiliki solusi maka determinant matrik koefisien haruslah bernilai nol. Dengan demikian maka nilai tegangan utama dapat dihitung dari akar persamaan pangkat tiga berikut 0 I σ I σ I σ 1 3 p 2 2 p 1 3 p − + − = (4.21) dengan z yz xz yz y xy xz xy x 3 2 yz 2 xz 2 xy z y z x y x 2 z y x 1 σ τ τ τ σ τ τ τ σ I τ τ τ σ σ σ σ σ σ I σ σ σ = − − − + + = + + =
Setelah nilai tegangan utama didapatkan (σp1, σp2, σp3) maka arah orientasi tegangan
utama (nx, ny, nz) dapat dihitung dengan memasukkan nilai tegangan utama ke
persamaan (4.20). Arah ketiga tegangan utama pasti saling tegak lurus.
Tegangan geser maksimum atau sering disebut “tegangan utama geser” dapat
dihitung dengan menggunakan persamaan
2
3 1 13σ
−
σ
=
τ
2
1 2 21σ
−
σ
=
τ
2
2 3 32σ
−
σ
=
τ
(4.22)Perlu dicatat bahwa pada saat tegangan geser bernilai maksimum, tegangan normal belum tentu bernilai nol. Orientasi tegangan geser maksimum adalah 450 terhadap arah
tegangan utama.
Untuk kasus tegangan bidang (2D), persamaan (4.21) diatas dapat disederhanakan menjadi 2 xy 2 y x y x 1,2 τ 2 σ σ 2 σ σ σ ⎟⎟ + ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ± + = (4.23)
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + = − y x xy 1 p σ σ 2τ tan 2 1 θ (4.24)
Gambar 4.18 Tegangan utama dua dimensi
Sedangkan tegangan geser maksimum untuk kasus dua dimensi juga dapat disederhanakan menjadi : 2 xy 2 y x max τ 2 σ σ τ ⎟⎟ + ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − = − xy y x 1 s 2τ σ σ tan 2 1 θ (4.25) 4.6. Lingkaran Mohr
Untuk memberikan gambaran kondisi tegangan pada berbagai arah dalam bentuk grafis, Otto Mohr (1914) memperkenalkan Mohr’s Circle. Lingkaran Mohr ini sangat reperestatif untuk kondisi tegangan dua dimensi. Sedangkan untuk kasus tiga dimensi, lingkaran Mohr cukup kompleks kecuali untuk kasus-kasus tertentu seperti misalnya saat salah satu tegangan utama berhimpit dengan salah satu sumbu koordinat.
Langkah-langkah untuk menggambar Lingkaran Mohr (lihat gambar 4.19) adalah sebagai berikut :
Gambar 4.19 Konstruksi Lingkaran Mohr dan hubungannya dengan state of stress
1. Hitung kondisi tegangan dua dimensi untuk mendapatkan nilai σx, σy, τxy
2. Buat sumbu datar σ dan sumbu vertikal τ
3. Buat titik pusat lingkaran Mohr
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
σ
+
σ
0
2
y x,
4. Buat dua titik yang saling berlawanan yaitu (σx, -τxy) dan (σy, τxy). Lingkaran dapat digambar dengan titik pusat pada step 2
5. Radius lingkaran dapat dihitung dengan persamaan
2 2 y x xy
2
r
⎟⎟
+
τ
⎠
⎞
⎜⎜
⎝
⎛
σ
−
σ
=
(4.26)6. Tegangan utama terletak pada posisi garis lingkaran memotong sumbu σ (σ1, σ2) 7. Tegangan geser maksimum sama dengan radius lingkaran
8. Sudut orientasi tegangan utama adalah = setengah dari sudut yang dibentuk oleh garis yang menghubungkan titik (σx, -τxy) dan (σy, τxy) dengan sumbu datar
9. Untuk mendapatkan nilai tegangan pada arah tertentu (φ) : gambar busur 2φ dari garis yang menghubungkan titik (σx, -τxy) dan (σy, τxy).
4.7. Konsentrasi Tegangan
Adanya diskontinuitas geometri pada elemen mesin seperti lubang, fillet, notch, inclusi dan lain-lain akan menaikkan nilai tegangan yang terjadi disekitar diskontinuitas tersebut. Gambar 4.20 menunjukkan distribusi tegangan disekitar pelat yang berlubang dan diberi beban tarik. Diskontinuitas ini sering disebut stress raiser dan kenaikan nilai
tegangan ini diberi istilah stress concentration (konsentrasi tegangan). Parameter yang digunakan untuk merepresentasikan konsentrasi tegangan adalah Faktor Konsentrasi Tegangan (Kc) dengan definisi :
nominal Tegangan terjadi yang maksimum Tegangan Kc = (4.27)
Nilai tegangan maksimum yang terjadi pada bagian diskontinuitas sangat sulit untuk dihitung secara analitik. Metoda yang umum untuk analisis tegangan pada stress raiser
adalah metoda numerik (Finite Element method, Boundary Element Method), dan metoda ekperimental seperti photoelastic, straingage dan lain-lain.
Gambar 4.20 Distribusi Tegangan disekitar pelat
berlubang yang mendapat beban tarik
Untuk memudahkan penggunaan aspek kosentrasi tegangan oleh para engineer dalam perancangan elemen mesin, faktor konsentrasi tegangan telah dibuat dalam bentuk grafik. Grafik konsentrasi tegangan pertama dibuat oleh Peterson (1951). Parameter-parameter geometri dibuat dalam varibel non dimensional. Beberapa grafik faktor konsentrasi tegangan yang umum digunakan dalam perancangan elemen mesin untuk berbagai pembebanan ditunjukkan pada gambar 4.21-4.24.
Gambar 4.24 Faktor konsentrasi tegangan pada fillet untuk poros
Studi Kasus 4:
Plat datar terbuat dari material britle, tinggi mayor H=4.5 in., tinggi minor h=2.5 in., Jari-jari fillet r=0.5 in. Tentukan Faktor konsentrasi tegangan dan tegangan maksimal untuk kondisi :
a. Pembebanan aksial,
b. Bending murni,
c. Pembebanan aksial dengan jari-jari fillet dirubah menjadi 0.25 in. Analisis : a. Pembebanan aksial 8 . 1 5 . 2 5 . 4 = = h H 0.2 5 . 2 5 . 0 = = h r
bh P A P 1.8 8 . 1 max ⎟= ⎠ ⎞ ⎜ ⎝ ⎛ =
σ
b. Bending murni. Dari gambar 4.22-b, Kc=1.5. Tegangan maksimalnya adalah :
2 2 max 9 6 5 . 1 bh M bh M = =
σ
c. Pembebanan aksial dengan jari-jari fillet dirubah menjadi 0.25 in.
1 . 0 5 . 2 25 . 0 = = h r
Dari gambar 4.22-a, Kc=2.2. Dari persamaan 4.27, Tegangan maksimalnya adalah :
bh
P
2 . 2 max =σ
Bisa dilihat, dengan mengurangi jari-jari fillet menjadi setengahnya, akan menaikkan tegangan maksimal satu stengah kalinya.
4.8. Regangan Elastis
Benda elastis yang mendapat beban-beban luar seperti ditunjukkan pada gambar 4.1 akan mengalami deformasi. Nilai deformasi dibagi dengan dimensi awal benda sebelum dibebani didefinisikan sebagai Regangan (strain). Parameter regangan sangat
penting dalam dunia teknik karena dapat diukur langsung dalam eksperimen. Sedangkan tegangan adalah paremeter yang tidak dapat diukur secara langsung dari eksperimen. Dengan menggunakan hubungan tegangan-regangan selanjutnya akan dapat ditentukan tegangan yang terjadi pada komponen mesin.
Jika sebuah benda isotropik dan elastis linear seperti ditunjukkan pada gambar 4.25 diberikan beban tarik dalam arah sumbu x (uniaksial), maka benda tersebut akan mengalami deformasi dalam arah x (memanjang) dan arah y, z (memendek). Jadi regangan normal dapat didefinisikan sebagai
x
dx
Lim
0 x x=
→ε
y
dy
Lim
0 y y=
→ε
z
dz
Lim
0 z z=
→ε
(4.28)Gambar 4.25 Ilustrasi regangan untuk benda yang mengalami beban tarik uniaksial
Jika benda isotropik pada gambar 4.25 diberi beban geser murni dalam pada bidang y dalam arah x, maka benda tersebut hanya akan mengalami deformasi geser seperti ditunjukkan pada gambar 4.26. Dari deformasi geser tersebut didefinisikan regangan geser atau shear strain
θ
≈
θ
=
=
γ
→y
tan
dx
Lim
0 y xy (4.29)Dengan cara yang sama, regangan γxz dan γyz dapat ditentukan dengan memberikan beban geser murni dalam arah y dan z.
Gambar 4.26 Ilustrasi regangan untuk benda yang mengalami regangan geser murni
Dari definisi di atas, jelaslah bahwa strain adalah tensor orde dua sehingga dapat dituliskan dalam bentuk
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
ε
γ
γ
γ
ε
γ
γ
γ
ε
=
ε
zz zy zx yz yy yx xz xy xx ij (4.30)dengan menggunakan prinsip kesetimbangan selanjutnya dapat dibuktikan bahwa γxz =
γzx dan γyz = γzy sehingga tensor regangan untuk 3 dimensi juga memiliki 6 komponen. Untuk kasus regangan 2 dimensi yang juga disebut regangan bidang (plain strain),
elemen regangan ditunjukkan pada gambar 4.27. Tensor regangan dapat disederhanakan menjadi
⎥
⎦
⎤
⎢
⎣
⎡
ε
γ
γ
ε
=
ε
yy yx xy xx ij (4.31)Gambar 4.27 Elemen regangan 2D
Nilai regangan maksimum serta arahnya untuk suatu elemen regangan dapat dicari dengan menggunakan lingakaran Mohr seperti pada analisis tegangan.
4.9. Hubungan Tegangan-Regangan
Hubungan antara tegangan dan regangan untuk benda elastis linear pertama kali diusulkan oleh Hooke, sehingga sering disebut dengan hukum Hooke. Untuk kasus regangan bidang hukum Hooke dapat dituliskan
[
x(
y z)
]
xE
1
σ
+
σ
ν
−
σ
=
ε
G
xy xyτ
=
γ
[
y(
x z)
]
yE
1
σ
−
ν
σ
+
σ
=
ε
G
xz xzτ
=
γ
(4.32)[
z(
x y)
]
zE
1
σ
−
ν
σ
+
σ
=
ε
G
yz yzτ
=
γ
dengan E adalah modulus elastisitas dan G adalah modulus geser. Hubungan modulus geser dan modulus elastisitas adalah
)
(
+
ν
=
1
2
E
G
(4.33)Dalam analisis eksperimental, parameter yang dapat diukur adalah regangan. Regangan biasanya diukur dengan straingage. Dengan demikian formula (4.32) perlu diubah menjadi λe 2Gε σx = xx + τxy =Gγxy λe 2Gε σy = yy + τxz =Gγxz (4.34) λe 2Gε σz = zz+ τyz =Gγyz
dengan e adalah dilatasi dan λ konstanta Lame :
zz yy xx
e
=
ε
+
ε
+
ε
)
)(
(
+
ν
−
ν
ν
=
λ
2
1
1
E
(4.35) Soal-Soal Latihan1. Untuk kondisi tegangan dibawah ini, gambarlah diagram Mohr, tentukan tegangan utama normal dan geser, serta gambarkan elemen tegangan (satuan Mpa).
a.
⎥
⎦
⎤
⎢
⎣
⎡
=
σ
6
4
4
12
ij b.⎥
⎦
⎤
⎢
⎣
⎡
−
=
σ
9
4
4
16
ij c.⎥
⎦
⎤
⎢
⎣
⎡
−
−
−
−
=
σ
8
4
4
2
ij2. Tentukanlah nilai dan arah tegangan utama untuk kondisi tegangan berikut (satuan Mpa). Untuk material baja (E = 210 Gpa, ν = 0,3) tentukanlah juga kondisi regangan dan regangan utama benda tersebut.
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
−
−
=
σ
6
2
3
2
12
4
3
4
8
ij3. Sebuah hook terbuat dengan penampang dan geometri seperti ditunjukkan pada gambar. Tentukanlah nilai dan arah tegangan pada bagian dalam dan bagian luar penampang A-A jika beban F yang diberikan adalah 1000 lb. (asumsi tidak ada konsentrasi tegangan).
4. Papan loncat indah menggunakan konstruksi (a) overhang dan (b) cantilever seperti ditunjukkan pada gambar. Tentukanlah tegangan utama yang maksimum pada konstruksi papan jika orang dengan berat 100 kg berdiri diujung papan. Diketahui penampang papan adalah 305 mm x 32 mm, dan modulus elastisitas papan papan adalah E = 10,3 Gpa. Berapakah defleksi maksimum papan ?
5. Sebuah poros mendapat beban tarik, torsi, dan beban melintang seperti pada gambar.
Tentukanlah konsentrasi tegangan dan tegangan utama pada bagian poros yang mengalami diskontinuitas.
6. Sebuah “hand crank” mendapat beban statik seperti ditunjukkan pada gambar. Tentukanlah lokasi dimana terjadi tegangan maksimum. Gambarkan elemen tegangan dan buat diagram Mohr. (asumsi tidak ada konsentrasi tegangan)
7. Sebuah pelat dengan dimensi seperti pada gambar mendapat beban momen M = 300 Nm dan gaya tarik P = 150 kN. Tentukanlah kondisi tegangan pada bagian yang mengalami konsentrasi tegangan. Tentukan juga kondisi regangan yang terjadi.
8. Tentukanlah perpindahan angular dan perpindahan linear pada elemen mesin berikut :
9. Poros dibebani secara aksial seperti pada gambar. Pada segmen yang manakah rata-rata tegangan tekan sama dengan P/A? Pada segmen yang manakah tegangan tekan maksimal sama dengan P/A?
10. Potongan AA sebuah crane hook dianggap berbentuk trapezoidal dengan dimensi seperti pada gambar. Tentukan resultan tegangan (bending dan tarik) pada titik P dan Q.
11. Poros ditumpu bearing pada lokasi A dan B dan dibebani dangan gaya ke bawah sebesar 1000 N, seperti pada gambar. Tentukan tegangan maksimal pada fillet poros. Fillet berjarak 70 mm dari B.
12. Gambar kondisi tegangan utama dan tegangan geser maksimal secara analitik dan cek hasilnya dengan menggunakan lingkaran Mohr, untuk :
σx σy σz τxy τyz τzx
a 0 -1500 0 750 0 0
b 750 500 250 500 0 0
13. Clamping fixture digunakan untuk membebani sebuah batang hingga mencapai tegangan tarik sebesar 30 kpsi dan disambungkan pada hydrolic ram, dengan menggunakan sambungan clevis. Sambungan clevis seperti pada gambar. Tentukan diameter pin clevis untuk menahan beban yang terjadi. Asumsikan tegangan geser ijin dan tegangan normal ijin masing-masing sebesar 40000 psi. Tentukan pula diameter luar ujung clevis supaya tegangan tearout dan bearing yang terjadi tidak melebihi tegangan ijin jika tebal flens clevis masing-masing 0.8 in.
14. Dua macam kunci roda digunakan untuk mengencangkan mur roda, yaitu kunci roda berbentuk L (a) dan berbentuk T (b). Untuk mengencangkan mur roda dengan masing-masing bentuk, digunakan 2 buah tangan, A dan B, seperti pada gambar. Untuk kedua bentuk,
jarak A dan B 1 ft, diameter pemegang 0.625 in. Dibutuhkan 70 ft-lb untuk mengencangkan mur roda. Hitung tegangan utama maksimal dan defleksi maksimal masing-masing bentuk.
15. Sebuah bracket seperti pada
gambar dengan data pada tabel, tentukan tegangan bending pada titik A dan tegangan geser karena beban transversal pada titik B. Tentukan juga tegangan geser karena beban torsi pada kedua
titik. Tentukan juga tegangan utama pada titik A dan B. catatan (satuan panjang mm; gaya N)
l a t h F OD ID E
a 100 400 10 20 50 20 14 steel b 70 200 6 80 85 20 6 steel