i
W ;/--n
TUGAS AKHIR – KI141502
IMPLEMENTASI
MOBILITY PARAMETERS
DALAM
REACTIVE ROUTING PROTOCOL
AOMDV PADA
VANETS
BAGAS ANDITA SETIAWAN NRP 5113 100 029
Dosen Pembimbing I
Dr. Eng. Radityo Anggoro, S.Kom., M.Sc. Dosen Pembimbing II
Ir. F.X. Arunanto, M.Sc
JURUSAN TEKNIK INFORMATIKA Fakultas Teknologi Informasi
Institut Teknologi Sepuluh Nopember Surabaya 2017
i
TUGAS AKHIR – KI141502IMPLEMENTASI
MOBILITY PARAMETERS
DALAM
REACTIVE ROUTING PROTOCOL
AOMDV PADA
VANETS
BAGAS ANDITA SETIAWAN NRP 5113 100 029
Dosen Pembimbing I
Dr. Eng. Radityo Anggoro, S.Kom., M.Sc. Dosen Pembimbing II
Ir. F.X. Arunanto, M.Sc.
JURUSAN TEKNIK INFORMATIKA Fakultas Teknologi Informasi
Institut Teknologi Sepuluh Nopember Surabaya 2017
ii
iii
UNDERGRADUATE THESES – KI141502IMPLEMENTATION OF MOBILITY PARAMETERS IN
REACTIVE ROUTING PROTOCOL AOMDV
ON VANETS
BAGAS ANDITA SETIAWAN NRP 5113 100 029
Supervisor I
Dr. Eng. Radityo Anggoro, S.Kom., M.Sc. Supervisor II
Ir. F.X. Arunanto, M.Sc. DEPARTMENT OF INFORMATICS
FACULTY OF INFORMATION TECHNOLOGY INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2017
iv
vi
vii
IMPLEMENTASI MOBILITY PARAMETERS DALAM
REACTIVE ROUTING PROTOCOL AOMDV
PADA VANETS
Nama Mahasiswa : BAGAS ANDITA SETIAWAN NRP : 5113100029
Jurusan : Teknik Informatika FTIF-ITS Dosen Pembimbing 1 : Dr. Eng. Radityo Anggoro, S.Kom.,
M.Sc.
Dosen Pembimbing 2 : Ir. F.X. Arunanto, M.Sc.
Abstrak
Seiring berjalannya waktu, perkembangan di bidang Teknologi Informasi sangat pesat dan berpengaruh luas terhadap kehidupan masyarakat. Hal ini disebabkan karena Teknologi Informasi dapat dimanfaatkan untuk menyelesaikan berbagai masalah individu, komunitas maupun umum. Salah satunya dengan menggunakan VANET. AOMDV adalah varian AODV yang telah dioptimisasi untuk memberikan lebih dari satu jalur dari sumber ke tujuan. Tetapi untuk menghadapi pola mobilitas yang spesial dan topologi yang berubah begitu cepat AOMDV harus lebih dioptimisasi.
Dalam buku tugas akhir ini menjelaskan implementasi AOMDV dengan menambahkan parameter mobilitas untuk meningkatkan kinerja AOMDV. SD-AOMDV adalah implementasi AOMDV yang menambahkan kecepatan dan arah ke jumlah hop sebagai routing metric baru AOMDV untuk menentukan hop selanjutnya.
Dari uji coba yang dilakukan, SD-AOMDV memberikan Routing Overhead lebih baik 38.52 paket dibandingkan AOMDV. Kata kunci : VANET, AOMDV, SD-AOMDV, NS-2
viii
ix
IMPLEMENTATION OF MOBILITY PARAMETERS IN REACTIVE ROUTING PROTOCOL
AOMDV ON VANETS
Student’s Name : BAGAS ANDITA SETIAWAN Student’s ID : 5113100029
Department : Teknik Informatika FTIF-ITS First Advisor : Dr. Eng. Radityo Anggoro, S.Kom.,
M.Sc.
Second Advisor : Ir. F.X. Arunanto, M.Sc
Abstract
As time goes by, developments of Information Technology is very rapid and have a wide influence on people's lives. This is because information technology can be used to solve various problems of individuals, communities and the public. One of them using VANET.AOMDV is a variant of AODV that has been optimized to provide more than one path from source to destination. But to deal with special mobility patterns and topology are changing so fast, AOMDV must be optimized.
In this final project, the author describes the implementation of mobility AOMDV by adding mobility parameters to improve performance AOMDV. SD-AOMDV is implementation of AOMDV that adds speed and direction to the number of hops as a new metric routing AOMDV to determine the next hop.
From the experiments performed, SD-AOMDV give the average Routing Overhead is better 38.52 packets than AOMDV.
x
xi
KATA PENGANTAR
Segala puji dan syukur bagi Allah atas rahmat, berkat, nikmat dan karunia-Nya sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul "Implementasi Mobility Parameters dalam Reactive Routing Protocol AOMDV Pada VANETs". Dalam pelaksanaan dan pembuatan Tugas Akhir ini tentunya penulis mendapat sangat banyak bantuan dari berbagai pihak, tanpa mengurangi rasa hormat penulis ingin mengucapkan terima kasih sebesar-besarnya kepada:
Allah SWT atas semua berkah yang diberikan sehingga penulis dapat menyelesaikan Tugas Akhir ini.
Bapak Sutopo dan Ibu Sri Andayani selaku orangtua penulis atas segala dukungan berupa motivasi dan doa sehingga penulis dapat mengerjakan Tugas Akhir ini.
Bapak Dr.Eng. Radityo Anggoro, S.Kom., M.Sc., selaku dosen pembimbing pertama, atas bimbingan, arahan, bantuan dan kesabaran bapak dalam mengantar penulis menyelesaikan Tugas Akhir.
Bapak Ir. F.X. Arunanto, M.Sc., selaku dosen pembimbing kedua, atas bimbingan, arahan, bantuan dan kesabaran bapak dalam mengantar penulis menyelesaikan Tugas Akhir.
Triani Tunggal Dewi yang selalu memberikan dukungan moril kepada penulis.
Teman seperjuangan semasa kuliah (Kevin, Sumitra, Bagus) dan teman-teman angkatan 2013 yang selama ini sudah membantu penulis dalam menyelesaikan Tugas Akhir ini.
Juga tidak lupa kepada semua pihak yang belum sempat disebutkan satu per satu yang telah membantu terselesaikannya Tugas Akhir ini.
Semoga Allah SWT memberikan balasan yang berlipat ganda kepada semua. Demi perbaikan selanjutnya, saran dan
xii
kritik yang membangun akan penulis terima dengan senang hati. Sekian dan terima kasih.
Surabaya, Juni 2017
xiii
DAFTAR ISI
LEMBAR PENGESAHAN ... Error! Bookmark not defined.
Abstrak ... vii
Abstract ... ix
KATA PENGANTAR ... xi
DAFTAR ISI ...xiii
4. DAFTAR GAMBAR ... xvii
6. DAFTAR TABEL ... xxi
7. DAFTAR PERSAMAAN ... xxii
BAB I PENDAHULUAN ... 1 Latar Belakang ... 1 Rumusan Masalah... 2 Batasan Masalah ... 2 Tujuan ... 2 Manfaat ... 3 Metodologi ... 3 Sistematika Penuliasan ... 4
BAB II TINJAUAN PUSTAKA ... 7
Vehicular Ad-Hoc Network (VANET) ... 7
Ad-hoc On-demand Distance Vector (AODV) ... 8
Ad-hoc On-demand Multipath Distance Vector (AOMDV) . 11 Speed Direction Ad-hoc On-demand Distance Vector (SD-AOMDV) ... 13 SUMO ... 14 OpenStreetMap ... 15 JOSM ... 15 AWK ... 16 2.8.1 NS-2 (Network Simulator 2) ...16 2.8.2 Instalasi NS-2 ...17 2.8.3 NS-2 Trace file ...19
BAB III PERANCANGAN... 23
Deskripsi Umum ... 23
Perancangan Skenario Grid ... 24
xiv
Perancangan SD-AOMDV ... 27
3.4.1 Mobilitas Dan Menghitung Arah ... 29
3.4.2 Struktur Data SD-AOMDV ... 30
Perancangan Metrik Analisis ... 31
3.5.1 Packet Delivery Ratio ... 31
3.5.2 Average End-to-End Delay ... 31
3.5.3 Routing Overhead (RO) ... 32
BAB IV IMPLEMENTASI ... 33
Implementasi Skenario Grid ... 33
Implementasi Skenario Riil ... 37
Implementasi Protokol SD-AOMDV ... 37
4.3.1 Modifikasi Struktur Paket RREQ ... 39
4.3.2 Modifikasi Struktur Paket RREP ... 39
4.3.3 Modifikasi Proses Pengiriman Paket RREQ ... 40
4.3.4 Modifikasi Proses Penerimaan Paket RREQ ... 42
4.3.5 Modifikasi Proses Pengiriman Paket RREP ... 42
4.3.6 Modifikasi Proses Penerimaan Paket RREP ... 43
Implementasi Metrik Analisis ... 45
4.4.1 Implementasi Packet Deliver Ratio ... 45
4.4.2 Impelementasi Routing Overhead ... 46
4.4.3 Implementasi Average End-to-end Delay ... 46
Implementasi Simulasi Pada NS-2 ... 47
BAB V UJI COBA DAN EVALUASI ... 51
Lingkungan Uji Coba ... 51
Skenario Uji Coba ... 51
Hasil Uji Coba Skenario Grid ... 52
5.3.1 Hasil PDR Pada Skenario Pengujian ... 52
5.3.2 Hasil End-to-end Delay Pada Skenario Pengujian ... 56
5.3.3 Hasil Routing Overhead Skenario Pengujian ... 61
Hasil Uji Coba Skenario Riil ... 66
BAB VI KESIMPULAN DAN SARAN ... 77
Kesimpulan ... 77
Saran ... 78
DAFTAR PUSTAKA ... 79
xv
A. Kode Sumber ... 81
A.1.Skenario NS-2... 81
A.2.Kode AWK Packet Delivery Ratio ... 86
A.3.Kode Routing Overhead ... 87
A.4.Kode End-to-end Delay ... 88
A.5.Kode Implementasi AOMDV::sendRequest() ... 90
A.6.Kode Implementasi AOMDV::sendReply() ... 96
A.7.Kode Implementasi AOMDV::recvRequest ... 100
A.8. Kode Implementasi AOMDV::recvReply() ... 112
A.9.Kode Routing Overhead ... 122
A.10 Kode rute yang dilalui oleh paket data ... 124
xvi
xvii
4.
DAFTAR GAMBAR
Gambar 2.1 : Ilustrasi VANET [2] ... 7
Gambar 2.2 : RREQ (broadcast) ... 9
Gambar 2.3 : Broadcast RREQ, Reverse Path mulai dibentuk ... 9
Gambar 2.4 : Broadcast RREQ, Reverse Path mulai dibentuk ... 9
Gambar 2.5 : Reverse Path berhasil dibentuk. ... 10
Gambar 2.6 : Reverse Path AOMDV ... 12
Gambar 2.7 : Perintah untuk meng-install dependensi NS-2 pada distribusi Debian ... 17
Gambar 2.8 : Perintah untuk mengunduh dan mengekstrak NS-2 ... 18
Gambar 2.9 : Perubahan yang dilakukan pada skrip ls.h... 19
Gambar 2.10 : Perubahan yang dilakukan pada .bashrc ... 20
Gambar 2.11 : Potongan kode pengaturan lingkungan simulasi VANET ... 21
Gambar 2.12 : Contoh Sampel Tipe Paket Pada Trace File NS-2 ... 22
Gambar 3.1 : Diagram Alur Rancangan Simulasi ... 23
Gambar 3.2 : Alur Pembuatan Skenario Grid ... 25
Gambar 3.3 : Contoh Hasil netgenerate Pada Skenario Grid ... 25
Gambar 3.4 : Alur Pembuatan Skenario Riil ... 26
Gambar 3.5 : Contoh Hasil netgenerate Pada Skenario Riil... 27
Gambar 3.6 : RREQ AOMDV ... 28
Gambar 3.7 : RREQ broadcast, reverse path mulai dibentuk .... 28
Gambar 3.8 : Dilakukan seleksi arah ... 29
Gambar 3.9 : Reverse Path yang dipilih ... 29
Gambar 4.1 : Perintah untuk membuat peta Grid ... 33
Gambar 4.2: Hasil dari netgenerate ... 34
Gambar 4.3: Perintah untuk membuat titik asal dan tujuan kendaraan ... 34
Gambar 4.4: Perintah untuk membuat rute kendaraan ... 35
Gambar 4.5: Isi dari berkas .sumocfg ... 35
xviii
Gambar 4.7: Perintah untuk mengkonversi keluaran dari sumo ke
format tcl ... 36
Gambar 4.8: Cuplikan Visualisasi Pergerakan kendaraan melalui sumo-gui ... 36
Gambar 4.9 : Perintah konveri file .osm ke .net.xml ... 37
Gambar 4.10 : Gambar cuplikan map riil yang dihasilkan ... 38
Gambar 4.11 : Penambahan Atribut Paket RREQ ... 39
Gambar 4.12 : Penambahan Atribut Paket RREP ... 40
Gambar 4.13 : Modifikasi Proses Pengiriman Paket RREQ ... 41
Gambar 4.14 : Modifikasi Proses Pengiriman Paket RREP ... 43
Gambar 4.15 : Pseudocode Dalam Memproses RREP Yang Diterima ... 44
Gambar 4.16: Perintah untuk menjalankan skrip awk untuk menghitung PDR. ... 45
Gambar 4.17: Hasil dari skrip PDR.awk ... 45
Gambar 4.18: Perintah untuk menjalankan skrip awk untuk menghitung routing overhead. ... 46
Gambar 4.19: Hasil dari skrip routing_overhead.awk ... 46
Gambar 4.20: Perintah untuk menjalankan skrip awk untuk menghitung average end-to-end delay. ... 47
Gambar 4.21: Hasil dari skrip end-to-end.awk ... 47
Gambar 5.1 : Grafik PDR kecepatan default 10 m/s ... 53
Gambar 5.2 : Grafik PDR kecepatan default 15 m/s ... 54
Gambar 5.3 : Grafik PDR kecepatan default 20 m/s ... 55
Gambar 5.4 : Paket Data AOMDV Variasi Kecepatan 15 m/s Jumlah Node 75 ... 55
Gambar 5.5 : Paket Data SD-AOMDV Variasi Kecepatan 15 m/s Jumlah Node 75 ... 56
Gambar 5.6 : Grafik End-to-end Delay kecepatan default 10 m/s ... 57
Gambar 5.7 : Grafik End-to-end Delay kecepatan default 15 m/s ... 58
Gambar 5.8 : Grafik End-to-end Delay kecepatan default 20 m/s ... 58
xix
Gambar 5.9 : Paket Data AOMDV Variasi Kecepatan 10 m/s
Jumlah Node 125 ... 59
Gambar 5.10 : Paket Data SD-AOMDV Variasi Kecepatan 10 m/s Jumlah Node 125 ... 60
Gambar 5.11 : Paket Data AOMDV Variasi Kecepatan 10 m/s Jumlah Node 150 ... 61
Gambar 5.12 : Paket Data AOMDV Variasi Kecepatan 10 m/s Jumlah Node 150 ... 61
Gambar 5.13 : Grafik Routing Overhead kecepatan default 10 m/s ... 62
Gambar 5.14 : Grafik Routing Overhead kecepatan default 15 m/s ... 63
Gambar 5.15 : Grafik Routing Overhead kecepatan default 20 m/s ... 63
Gambar 5.16 : Paket Data AOMDV Variasi Kecepatan 10 m/s Jumlah Node 125 ... 64
Gambar 5.17 : Paket Data SD-AOMDV Variasi Kecepatan 10 m/s Jumlah Node 125 ... 65
Gambar 5.18 : Paket Data AOMDV Variasi Kecepatan 15 m/s Jumlah Node 100 ... 65
Gambar 5.19 : : Paket Data SD-AOMDV Variasi Kecepatan 15 m/s Jumlah Node 100 ... 66
Gambar 5.20 : Grafik PDR Skenario Riil ... 67
Gambar 5.21 : Grafik End-to-end Delay Skenario Riil ... 68
Gambar 5.22 : Grafik Routing Overhead Skenario Riil ... 68
Gambar 5.23 : Paket Data AOMDV Skenario Riil Jumlah Node 150 ... 69
Gambar 5.24 : Paket Data SD-AOMDV Skenario Riil Jumlah Node 150 ... 70
Gambar 5.25 : Paket Data AOMDV Skenario Riil Jumlah Node 150 ... 71
Gambar 5.26 : Paket Data SD-AOMDV Skenario Riil Jumlah Node 150 ... 72
Gambar 5.27 : Paket Data AOMDV Skenario Riil Jumlah Node 75 ... 72
xx
Gambar 5.28 : Paket Data SD-AOMDV Skenario Riil Jumlah Node 75 ... 73 Gambar 5.29 : : Paket Data AOMDV Skenario Riil Jumlah Node 100 ... 73 Gambar 5.30 : Paket Data SD-AOMDV Skenario Riil Jumlah Node 100 ... 74 Gambar 5.31 : Paket Data AOMDV Skenario Riil Jumlah Node 125 ... 74 Gambar 5.32 : Paket Data SD-AOMDV Skenario Riil Jumlah Node 125 ... 75
xxi
5.
DAFTAR TABEL
Tabel 3.1 Struktur Paket RREQ SD-AOMDV ... 30 Tabel 3.2 : Struktur Paket RREP SD-AOMDV ... 31 Tabel 4.1 : Penjelasan Dari Parameter node-config ... 47 Tabel 5.1: Spesifikasi perangkat uji coba ... 51 Tabel 5.2: Parameter skenario pengujian ... 51
xxii
xxiii
7.
DAFTAR PERSAMAAN
Persamaan 3.1 ... 31 Persamaan 3.2 ... 32 Persamaan 3.3 ... 32
xxiv
1
1.
BAB I
PENDAHULUAN
Latar Belakang
Seiring berjalannya waktu, perkembangan di bidang Teknologi Informasi sangat pesat dan berpengaruh luas terhadap kehidupan masyarakat. Hal ini disebabkan karena Teknologi Informasi dapat dimanfaatkan untuk menyelesaikan berbagai masalah individu, komunitas maupun umum. Misalnya saja permasalahan lalu lintas. Utamanya, keamanan dalam berkendara mendapat perhatian lebih dari masyarakat. Bertambahnya angka kecelakaan dan kemacetan mengharuskan penerapan Intelligent Transportation Systems (ITS). Untuk menanggulangi hal tersebut dapat dimanfaatkan teknologi jaringan Ad-Hoc yang mana mendasari adanya Vehicular Ad-Hoc network (VANET).
VANET adalah pengembangan dari MANETs yang diaplikasikan pada kendaraan untuk melakukan komunikasi antara kendaraan terdekat dan antara kendaraan dengan infrastruktur terdekat (roadside equipment). Dalam VANET, kendaraan dianggap sebagai node. Kecepatan kendaraan dibatasi oleh batas kecepatan, kemacetan dan mekanisme kontrol lalu lintas (tanda berhenti dan lampu lalu lintas). Di masa yang akan datang kendaraan akan dilengkapi dengan perangkat yang memiliki jangkauan lebih luas.
Tujuan utama dalam VANET adalah memberikan keamanan dan kenyamanan untuk pengendara. Contohnya, informasi cuacu, mobile e-commerce, akses internet dan aplikasi multimedia lainnya. Untuk itu dibutuhkan protokol yang stabil. Protokol baru yang diimplementasikan di VANET adalah AOMDV. Namun, AOMDV memiliki permasalahan yaitu saat 2 kendaraan yang bergerak pada arah yang berbeda saling berkomunikasi, jalur
komunikasinya lebih cepat terputus dari pada kendaraan yang bergerak pada arah yang sama.
Pada Tugas Akhir ini akan menggunakan Ad-hoc On-Demand Multipath Distance Vector (AOMDV) yang dimodifikasi untuk meningkatkan kinerjanya. Adapun bagian yang akan di modifikasi dalam routing protocol ini yaitu menambahkan arah dan kecepatan pada hop count untuk menentukan next hop selama proses route discovery.
Rumusan Masalah
Rumusan masalah yang diangkat dalam Tugas Akhir ini adalah sebagai berikut:
1. Bagaimana menentukan intermediate nodes yang dilalui oleh paket pada protocol AOMDV?
2. Seberapa besarkah pengaruh penambahan arah dan kecepatan terhadap performa routing protocol AOMDV diukur dari Packet Delivery Ration (PDR), End-to-End delay dan Routing Overhead?
Batasan Masalah
Permasalahan yang akan dibahas dalam Tugas Akhir ini memiliki beberapa batasan antara lain:
1. Routing protocol yang diuji coba adalah AOMDV. 2. Menambahkan faktor kecepatan dan arah pada
routing metrics untuk menentukan next hop. 3. Proses pengujian menggunakan Network
Simulator 2 (NS-2).
4. Pembuatan skenario grid dan riil menggunakan SUMO.
Tujuan
Tujuan pengerjaan Tugas Akhir ini adalah untuk mengetahui pengaruh penambahan arah dan kecepatan
terhadap stabilitas koneksi protokol AOMDV pada lingkungan VANET.
Manfaat
Manfaat dari pengerjaan Tugas Akhir ini antara lain : 1. Memberikan gambaran terhadap faktor – faktor
yang dapat digunakan pada lingkungan VANET. 2. Menjadi acuan lebih lanjut untuk topik penelitian
pada protokol AOMDV. Metodologi
Adapun langkah- langkah yang ditempuh dalam pengerjaan Tugas Akhir ini adalah sebagai berikut:
1. Penyusunan proposal tugas akhir
Proposal tugas akhir merupakan tahap awal dalam memulai pengerjaan Tugas Akhir. Pada proposal tersebut teridiri dari latar belakang, rumusan masalah, batasan masalah, tujuan, dan manfaat pembuatan tugas akhir. Di samping itu dijabarkan tinjauan pustaka yang digunakan sebagai referensi pendukung Tugas Akhir. Selanjutnya ada pun sub bab metodologi berisi penjelasan penyusunan tugas akhir. Terdapat pula sub bab jadwal kegiatan yang menjelaskan jadwal pengerjaan tugas akhir. 2. Studi literature
Pada studi literatur ini, akan dipelajari sejumlah alat dan metode dalam mendukung pembuatan Tugas Akhir diantaranya buku referensi, jurnal, dokumentasi yang didapatkan dari internet.
3. Implementasi Protokol
Pada tahap ini dilakukan perancangan sistem berdasarkan studi literatur dan pembelajaran konsep dari perangkat lunak yang ada. Pada tahap ini akan
didefinisikan bentuk awal dari aplikasi. Serta dilakukan desain sistem dan desain proses- proses yang ada.
4. Pengujian dan evaluasi
Setelah routing protocol tersebut dimodifikasi, selanjutnya dilakukan pengujian dengan VANET simulator generator dan traffic generator untuk skenario topologi yang diujikan. Kemudian simulasi yang dibuat pada generator tersebut dijalankan pada ns-2 Network Simulator yang output-nya berupa trace file. Dari trace file tersebut akan dihitung packet delivery ratio (PDR) dan end to end delay untuk mengetahui performa routing protocol yang telah dimodifikasi.
5. Penyusunan Buku Tugas Akhir
Pada tahap ini dilakukan penyusunan laporan yang menjelaskan dasar teori dan metode yang digunakan dalam tugas akhir ini serta hasil dari implementasi aplikasi perangkat lunak yang telah dibuat.
Sistematika Penuliasan
Sistematika penulisan buku tugas akhir secara garis besar antara lain:
BAB I. PENDAHULUAN
Bab yang berisi mengenai latar belakang, tujuan, dan manfaat dari pembuatan Tugas Akhir. Selain itu ada rumusan masalah, batasan masalah, metodologi yang digunakan, dan sistematika penulisan juga merupakan bagian dari bab ini. BAB II. TINJAUAN PUSTAKA
Bab ini berisi penjelasan secara detail mengenai dasar- dasar penunjang untuk mendukung pembuatan Tugas Akhir ini.
Bab ini berisi perancangan metode yang nantinya akan diimplementasikan dan dilakukan uji coba dan evaluasi.
BAB IV. IMPLEMENTASI
Bab ini membahas implementasi dari dedsain yang telah diubuat pada bab sebelumnya. Penjelasan berupa implementasi mobilitas vehicular, konfigurasi system dan skrip analisis yang digunakan untuk menguji performa routing protocol.
BAB V. UJI COBA DAN EVALUASI
Bab ini mejelaskan tahap pengujian sisten dan pengujian performa dalam skenario mobilitas vehicular yang dibuat.
BAB VI. PENUTUP
Bab ini merupakan bab terakhir yang menyampaikan kesimpulan dari hasil uji coba yang dilakukan terhadap rumuskan masalah yang ada dan saran untuk pengembangan lebih lanjut. .
7
2.
BAB II
TINJAUAN PUSTAKA
Vehicular Ad-Hoc Network (VANET)
Vehicular Ad Hoc Networks (VANETs) adalah teknologi yang mengintegrasikan jaringan wireless generasi baru ke kendaraan. VANET membangun jaringan Ad-Hoc yang kuat antara kendaraan yang bergerak dan Roadside Unit [1]. Contoh dari jaringan VANET dapat dilihat pada Gambar 2.1. Ini merupakan jenis MANET yang membentuk hubungan antara kendaraan yang saling berdekatan dan Roadside Unit yang juga saling berdekatan. VANET dapat mencapai komunikasi afektif antara node bergerak dengan menggunakan ad-hoc yang berbeda diantaranya Wifi IEEE 802.11 b/g, WiMAX IEEE 802.10, Bluethoot, IRA. VANET terutama ditujukan untuk memberikan informasi terkait keselamatan dan manajemen lalu lintas.
Keamanan dan manajemen lalu lintas memerlukan informasi real time dan secara langsung yang mempengaruhi kehidupan masyarakat yang bepergian di jalan. Baru-baru ini telah diajukan pada aplikasi melalui V2V (Vehicle to Vehicle) dan V2I (Vehicle to Infrastructure) komunikasi, bertujuan untuk meningkatkan keselamatan mengemudi dan manajemen lalu lintas sementara menyediakan driver dan penumpang dengan akses Internet. Kesederhanaan dan keamanan mekanisme VANET memastikan efisiensi yang lebih besar. Keselamatan dijadikan sebagai atribut utama sistem Vehicular Ad Hoc Networks (VANET). Mayoritas dari semua node di VANET merupakan kendaraan yang mampu membentuk self organizing networks tanpa sepengetahuan satu sama lain. VANET dengan tingkat keamanan yang rendah lebih rentan terhadap serangan yang sering terjadi. Ada berbagai macam aplikasi seperti pada perusahaan komersial, konsumen, hiburan dimana VANET digunkana dan sangat perlu untuk menambahkan keamanan ke jaringan ini sehingga kerusakan dapat dihindari.
Ad-hoc On-demand Distance Vector (AODV)
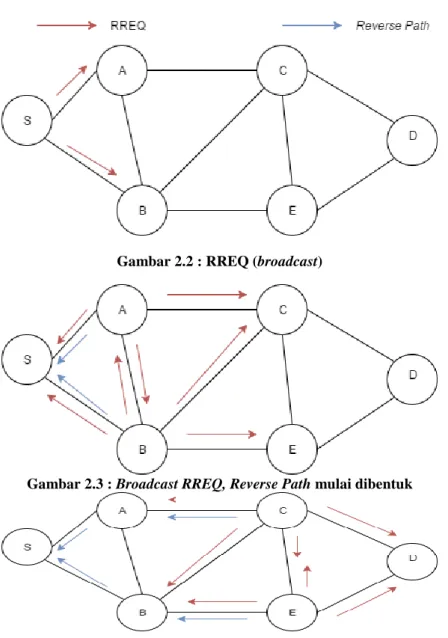
AODV adalah jenis protokol reaktif dimana rute dari sumber ke tujuan dibuat dibentuk hanya jika diperlukan dan rute ini tetap selama mereka diinginkan oleh sumbernya [3]. AODV menggunakan nomor urut untuk memastikan kesegaran rute dan penggunaan Hello messages untuk mendeteksi dan memantau link ke neighbours. Setiap node aktif secara berkala melakukan broadcast sebuah Hello message ke semua neighbours. Karena Hello messages dikirim secara berkala, ketika sebuah node gagal menerima beberapa Hello messages dari neighbour, ia mendeteksi adanya link failure. Setiap node jaringan mempertahankan routing table yang menyimpan informasi routing. AODV mendefinisikan tiga jenis control messages untuk route discovery dan maintenance yaitu route request (RREQ), route reply (RREP) dan route error message (RREQ).
Gambar 2.2 : RREQ (broadcast)
Gambar 2.3 : Broadcast RREQ, ReversePath mulai dibentuk
Gambar 2.5 : Reverse Path berhasildibentuk.
Route discovery di dalam AODV dimulai setiap ada sebuah node pengirim mebutuhkan koneksi dengan node yang lain yang mana tidak memiliki informasi di tabelnya. Setiap node menjaga dua counter yang berbeda: sebuah nomor urut node dan sebuah broadcast_id. Node pengirim memulai path discovery dengan cara melakukan broadcast sebuah paket route request (RREQ) kepada neighbours seperti pada Gambar 2.2. RREQ terdiri dari:
<source_addr,source_sequence_#,broadcast_id, dest_sequence_#, hop_cnt>
Pasangan < source_addr, broadcast_id > mengidentifikasi sebuah paket RREQ secara unik. broadcast_id bertambah setiap pengirim meminta sebuah paket RREQ baru. Setiap neighbor memenuhi RREQ dengan mengirimkan sebuah paket route reply (RREP) kembali ke pengirim, atau rebroadcasts paket RREQ ke neighbor-nya sendiri setelah menambahkan hop_cnt. Perlu diperhatikan bahwa sebuah node mungkin menerima banyak salinan dari paket rute broadcast yang sama dari berbagai tetangga. Ketika sebuah intermediate node menerima RREQ jika telah menerima RREQ dengan id dan alamat sumber broadcast yang sama, ia akan drop RREQ yang berlebihan dan tidak melakukan
rebroadcast jika sebuah node tidak dapat memenuhi, RREQ itu melacak informasi untuk menerapkan reverse path dan forward path yang akan menyertai transmisi RREP.
Saat RREQ melakukan perpindahan dari satu pengirim ke berbagai tujuan, secara otomatis akan membentuk reverse path dari semua node kembali ke pengirim seperti yang digambarkan pada Gambar 2.3 dan Gambar 2.4. Untuk mengatur reverse path, sebuah node mencatat alamat neighbor dimana ia menerima salinan RREQ pertama. Entri reverse path ini dipertahankan setidaknya untuk waktu yang cukup bagi RREQ untuk melintasi jaringan dan menghasilkan reply kepada pengirim. Setelah itu, dapat dilihat pada Gambar 2.5 RREQ hanya dipilih satu saja, RREQ duplikat akan diabaikan atau dibuang sehingga membentuk reverse path dan reverse path alternatif tidak akan disimpan.
Ad-hoc On-demand Multipath Distance Vector (AOMDV) Protokol AOMDV merupakan peningkatan berdasarkan Ad-hoc On-demand Distance Vector (AODV) [4]. Namun, kinerja AOMDV jauh lebih baik daripada AODV. AOMDV dapat menemukan node-disjoint path dan link-disjoint path saat melakukan route discovery. Karena kondisi node-disjoint path jauh lebih ketat daripada link-disjoint path, jumlah node-disjoint path kurang dari link-disjoint path. Dengan demikian link-disjoint lebih populer digunakan.
Setelah beberapa path ditemukan, AOMDV akan menyimpan path di routing table. Source node akan memilih satu path yang mapan sesuai timestamp. Forward path yang pertama adalah yang tersedia paling awal. Untuk route maintenance, bila terjadi route failure, paket dapat diteruskan melalui path lain. Untuk memastikan kesegaran rute, mekanisme timeout diadopsi. Pesan HELLO disiarkan untuk menghilangkan rute yang kedaluwarsa.
AOMDV adalah protokol routing on-demand. Ketika source node membutuhkan rute ke destination, dan tidak ada path yang tersedia, source node akan broadcast paket routing RREQ untuk
memulai proses route discovery yang dapat dilihat pada Gambar 2.2. Proses pengiriman paket RREQ dapat dilihat pada Gambar 2.3 dan 2.4. Node lain mungkin menerima paket RREQ duplikat karena flood. Ketika kasus ini terjadi, node lain akan menetapkan atau memperbarui beberapa reverse path sesuai dengan hop RREQ yang pertama yang dapat dilihat pada Gambar 2.6. Namun, AODV akan membuat reverse path menggunakan paket RREQ pertama dan paket RREQ duplikat lainnya akan dibuang.
Gambar 2.6 : Reverse Path AOMDV
Setelah reverse path terbentuk, intermediate node akan mencari routing table yang tersedia untuk forward path ke destination node. Jika path ada, paket RREP akan dikirim kembali ke source node di sepanjang reverse path dan paket RREQ akan dibuang. Jika path tidak ada dan intermediate node tidak meneruskan paket RREQ duplikat lainnya, paket RREQ akan akan di-broadcast. Ketika destination node menerima paket RREQ, ia akan menetapkan atau memperbarui reverse path. Namun, destination node akan membalas dengan policy yang lebih longgar untuk menemukan beberapa link disjoint path. Destination node akan membalas semua paket RREQ dari neighbors yang berbeda walaupun paket RREQ memiliki hop pertama yang sama. Paket RREP yang berbeda akan dikirim kembali melalui berbagai
neighbors yang dapat memastikan pembentukan link-disjoint path. Setelah melewati neighbors yang berbeda, paket RREQ akan dikirim ke source node di sepanjang link-disjoint reverse path.
Ketika intermediate dan source node menerima paket RREP, mereka akan membuat loop-free dan link-disjoint paths ke destination node sesuai dengan hop- hop RREP yang berbeda. Untuk node intermediate yang dibagi oleh link-disjoint path yang berbeda, mereka akan memeriksa apakah ada reverse path yang tidak terpakai ke source node. Jika demikian, satu reverse path akan dipilih untuk meneruskan paket RREP saat ini; Jika tidak, paket akan dibuang.
Speed Direction Ad-hoc On-demand Distance Vector (SD-AOMDV)
SD-AOMDV memodifikasi AOMDV agar sesuai dengan karakteristik VANET. SD-AOMDV menambahkan parameter mobilitas: kecepatan dan arah ke hop dihitung sebagai metrik routing AOMDV baru untuk memilih hop berikutnya selama proses route discovery [2].
Ketika source node mengirim sebuah paket destination node, routing protocol mendapatkan arah dari source node. Kemudian, ia mendapatkan arah dari destination node. Berdasarkan arah source dan destination, intermediate node dapat berpartisipasi dalam rute antara source dan destination yang sudah ditentukan. Karena menggunakan model mobilitas Manhattan, simpul dapat bergerak ke arah sumber dan tujuan, arah sumber, atau arah tujuan yang sama.
Sebagai node dalam bergerak VANET dengan kecepatan tinggi, stabilitas rute mereka kurang dari MANET. Di sisi lain, jika dua node yang bergerak dalam arah yang berbeda saling berkomunikasi, jalur komunikasi mereka putus lebih cepat dari pada keadaan dimana node yang bergerak ke arah yang sama. Oleh karena itu, jika source dan destination bergerak ke arah yang sama, protokol hanya boleh memilih intermediate node yang bergerak ke arah yang sama dengan source dan destination. Namun, jika source
node dan destination node bergerak ke arah yang berbeda, protokol hanya memilih intermediate node yang bergerak searah dengan source dan destination. Protokol juga memilih intermediate node yang bergerak dalam kecepatan yang sesuai dengan source dan destination.
Simulation of Urban MObility (SUMO)
SUMO adalah simulasi lalu lintas yang gratis dan open source yang tersedia mulai dari tahun 2001 [5]. Ada dua alasan untuk membuat karya tersebut tersedia sebagai open source. Yang pertama adalah keinginan untuk mendukung komunitas simulasi lalu lintas dengan alat gratis yang bisa diimplementasikan algoritma sendiri. Selain SUMO sendiri, banyak aplikasi pendukung yang menangani tugas seperti pencarian rute, visualisasi, import jaringan dan menghitung emisi.
Ada beberapa tools dari SUMO yang dapat membantu pembuatan simulasi lalu lintas pada tahap- tahap yang berbeda. Berikut penjelasan fungsi tools yang digunakan dalam pembuatan Tugas Akhir ini:
netconvert
netconvert merupakan program CLI yang berfungsi untuk melakukan konversi dari peta seperti OpenStreetMap atau VISUM menjadi format native SUMO. Pada Tugas Akhir ini penulis menggunakan netconvert untuk mengkonversi peta dari OpenStreetMap.
randomTrips.py
Tool dalam SUMO untuk membuat rute acak yang akan dilalui oleh kendaraan dalam simulasi.
route2trips.py
Membuat detail perjalanan setiap kendaraan berdasarkan output dari randomTrips.py
duarouter
duarouter Tool dalam SUMO untuk melakukan perhitungan rute berdasarkan definisi yang diberikan dan memperbaiki kerusakan rute
sumo
Program yang melakukan simulasi lalu lintas berdasarkan data- data yang didapatkan dari netcovert dan route2trips.py. Hasil simulasi dapat di export ke sebuah file untuk nantinya dikonversi menjadi format lain.
Sumo-gui
GUI untuk melihat simulasi yang dilakukan oleh SUMO secara grafis.
traceExporter.py
Tool yang bertujuan untuk mengkonversi output dari sumo menjadi format yang dapat digunakan pada simulator lain. Pada Tugas Akhir ini penulis menggunakan traceExporter.py untuk mengkonversi data menjadi format .tcl yang dapat digunakan pada NS-2.
OpenStreetMap
OpenStreetMap (OSM) merupakan sebuah proyek kolaboratif untuk membuat sebuah peta dunia yang dapat dengan bebas diubah oleh siapapun. Selanjutnya menjadi komunitas pemetaan yang berkontribusi dan memelihara data tentang jalan, jalan setapak, kafe, stasiun kereta api, dan banyak lagi, di seluruh dunia [6].
Pada Tugas Akhir ini penulis menggunakan data yang tersedia pada OpenStreetMap untuk membuat skenario lalu lintas dengan peta lalu lintas Surabaya.
JOSM
JOSM (Java OpenStreetMap Editor) adalah sebuah alat untuk menyunting data yang didapatkan dari OpenStreetMap pada komputer [7]. JOSM membutuhkan Java Runtime Environment untuk bisa digunakan. Aplikasi
JOSM dapat diunduh pada alamat
aplikasi ini untuk menyunting dan merapikan potongan peta yang diunduh dari OpenStreetMap.
AWK
AWK menafsirkan sebuah tujuan khusus pemrograman memungkinkan untuk menangani pekerjaan pemformatan data sederhana dengan mudah hanya dengan beberapa baris kode [8]. AWK bersifat data-driven yang berisikan kumpulan perintah yang akan dijalankan pada data tekstual baik secara langsung pada. Pada Tugas Akhir ini penulis menggunakan AWK untuk memproses data yang dihasilkan dari simulasi pada NS-2 dan mendapatkan analisis mengenai packet delivery ratio, end-to-end delay, routing overhead dan lain- lain.
2.8.1 NS-2 (Network Simulator 2)
NS-2 adalah alat simulasi jaringan open source yang banyak digunakan dalam mempelajari struktur dinamik dari jaringan komunikasi. Simulasi dari jaringan nirkabel dan protokol (seperti algoritma routing, TCP, dan UDP) dapat diselesaikan dengan baik dengan simulator ini [9]. Karena kefleksibelannya, NS-2 menjadi popular dikalangan komunitas peneliti sejak awal kemunculannya pada tahun 1989.
NS-2 terdiri dari dua bahasa pemrograman yaitu C++ dan OTcl(Objek-oriented Tool Command Language). C++ mendefinisikan mekanisme internal dari simulasi objek dan OTcl berfungsi untuk menset simulasi dengan assembly dan mengkonfigurasi objek sebagai penjadwalan diskrit. C++ dan OTcl saling berhubungan menggunakan TclCL. Setelah simulasi, output NS-2 dapat berupa basis teks atau animasi berdasarkan simulasi. Untuk
menginterprestasikan output ini secara grafik dan interaktif maka dibutuhkan NAM (Network Animator) dan XGraph. Untuk menganalisa tingkah laku dari jaringan user dapat mengekstrak subset dari data teks dan mentransformasikannya agar menjadi lebih atraktif.
Pada prakteknya, NS-2 merupakan simulasi yang berjalan pada sistem UNIX. Oleh sebab itu NS-2 dapat berjalan dengan baik di sistem operasi Linux, OpenBSD, FreeBSD, dan sistem operasi berbasis unix lainnya. Walaupun demikian NS-2 dapat juga berjalan pada Windows dengan menggunakan tool tambahan yaitu Cygwin. Cygwin adalah port dari tool pengembangan GNU (GNU’s Not UNIX) untuk Microsoft Windows. Hal ini dimungkinkan dengan adanya librari Cygwin sebagai penyedia sistem dan lingkungan UNIX yang dibutuhkan oleh tool GNU tersebut. Singkatnya, Cygwin adalah sebuah lingkungan yang menyerupai Linux untuk Windows.
2.8.2 Instalasi NS-2
NS-2 membutuhkan beberapa package untuk dapat dijalankan. Selain itu, NS-2 juga membutuhkan GCC-4.4 untuk dapat berjalan. Perintah yang harus dijalankan dapat dilihat pada Gambar 2.7.
sudo apt-get install build-essential autocon ↪automake libxmu-dev gcc-4.4
Gambar 2.7 : Perintah untuk meng-install dependensi NS-2 pada distribusi Debian
Setelah semua dependensi ter-install, unduh package NS-2 yang bernama “ns-allinone-2.35.tar.gz” . Untuk perintah mengunduh dan ekstrak file tarball dapat dilihat pada Gambar 2.8.
wget
↪http://downloads.sourceforge.net/project ↪/nsnam/allinone/ns-allinone-2.35
↪/ns-allinone-2.35.tar.gz
↪tar -xvf ns-allinone-2.35.tar.gz
Gambar 2.8 : Perintah untuk mengunduh dan mengekstrak NS-2
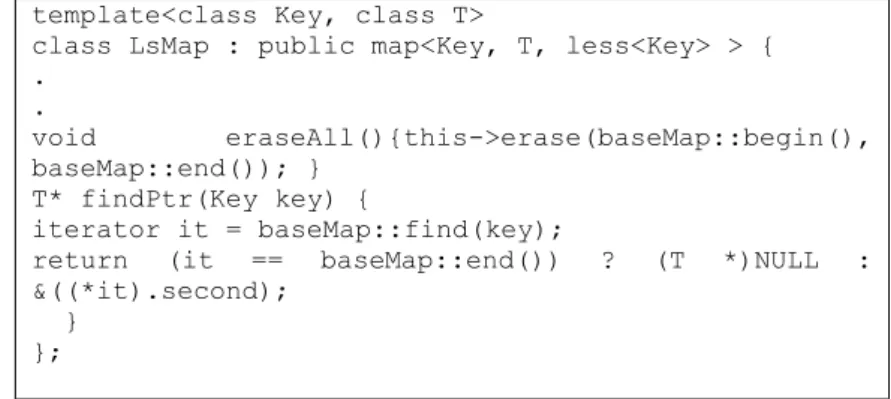
Pindah navigasi folder pada terminal menuju folder “linkstate”. Di sini diasumsikan folder NS-2 ada pada home directory yaitu di ~/ns-allinone-2.35/ns-2.35/linkstate. Kemudian buka file yang bernama “ls.h” dengan gedit dan cari baris 137 pada skrip tersebut. Setelah itu tambahkan “this->” di depan “erase” sehingga menjadi “this->erase”. Screenshot dari perubahan yang dilakukan pada file tersebut dapat dilihat pada Gambar 2.9.
Setelah semua tahap selesai jalankan instalasi NS-2 di folder ~/ns-allinone-2.35/ns-2.35 dengan ketikkan perintah ./install pada terminal.
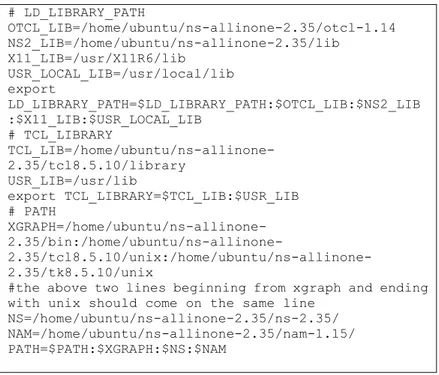
Setelah proses instalasi selesai lakukan pengaturan pada environment. Pengaturan dapat dilakukan dengan menyunting file .bashrc di home directory dapat dilihat pada Gambar 2.10. Setelah perubahan dilakukan simpan file dan restart Ubuntu.
template<class Key, class T>
class LsMap : public map<Key, T, less<Key> > { . . void eraseAll(){this->erase(baseMap::begin(), baseMap::end()); } T* findPtr(Key key) { iterator it = baseMap::find(key);
return (it == baseMap::end()) ? (T *)NULL : &((*it).second);
} };
Gambar 2.9 : Perubahan yang dilakukan pada skrip ls.h
2.8.3 NS-2 Trace file
Simulasi yang dijalankan NS-2 akan menghasilkan sebuah file yaitu trace file. Trace file berisi setiap pengiriman dan penerimaan paket oleh setiap node berjalan ketika simulasi. Setiap jenis paket pada jaringan memiliki pola yang berbeda sehingga dapat dibedakan untuk membantu memudahkan analisis terhadap hasil simulasi.
Contoh jenis paket data yang beredar di dalam simulasi ditunjukkan pada Gambar 2.12a hingga 2.12c menunjukkan contoh paket routing control AOMDV dari NS-2. Paket selalu ditandai dengan tulisan “RTR” pada kolom keempat. Kolom ketujuh menunjukkan informasi nama routing protocol. Kolom kedelapan menunjukkan ukuran dari paket routing control. Kolom terakhir menunjukkan jenis paket routing control.
# LD_LIBRARY_PATH OTCL_LIB=/home/ubuntu/ns-allinone-2.35/otcl-1.14 NS2_LIB=/home/ubuntu/ns-allinone-2.35/lib X11_LIB=/usr/X11R6/lib USR_LOCAL_LIB=/usr/local/lib export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$OTCL_LIB:$NS2_LIB :$X11_LIB:$USR_LOCAL_LIB # TCL_LIBRARY TCL_LIB=/home/ubuntu/ns-allinone-2.35/tcl8.5.10/library USR_LIB=/usr/lib export TCL_LIBRARY=$TCL_LIB:$USR_LIB # PATH XGRAPH=/home/ubuntu/ns-allinone- 2.35/bin:/home/ubuntu/ns-allinone- 2.35/tcl8.5.10/unix:/home/ubuntu/ns-allinone-2.35/tk8.5.10/unix
#the above two lines beginning from xgraph and ending with unix should come on the same line
NS=/home/ubuntu/ns-allinone-2.35/ns-2.35/ NAM=/home/ubuntu/ns-allinone-2.35/nam-1.15/ PATH=$PATH:$XGRAPH:$NS:$NAM
Gambar 2.10 : Perubahan yang dilakukan pada .bashrc
Gambar 2.12d menunjukkan paket data dari agen CBR (Constant Bit Rate). “AGT” selalu menjadi tanda bahwa baris itu merupakan trace file dari paket data yang dapat di lihat pada kolom keempat. Kolom ketujuh menunjukkan informasi nama agen. Kolom kedelapan menunjukkan ukran dari paket data.
Ada pola dalam trace file yang menandai pengiriman dan penerimaan paket. Untuk pengiriman paket selalu bertuliskan “s” dan penerimaan paket selalu bertuliskan “r” pada kolom pertama. Kolom kedua adalah waktu ketika event tersebut terjadi. Dengan mengetahui pola yang terdapat pada trace file, analisis hasil simulasi dapat dilakukan.
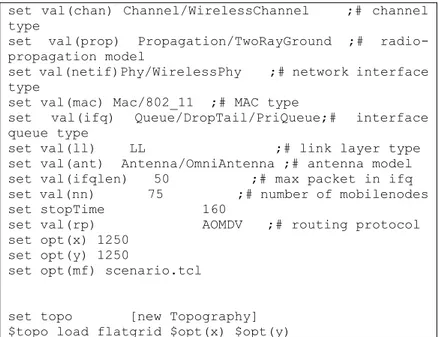
set val(chan) Channel/WirelessChannel ;# channel type
set val(prop) Propagation/TwoRayGround ;# radio-propagation model
set val(netif)Phy/WirelessPhy ;# network interface type
set val(mac) Mac/802_11 ;# MAC type
set val(ifq) Queue/DropTail/PriQueue;# interface queue type
set val(ll) LL ;# link layer type set val(ant) Antenna/OmniAntenna ;# antenna model set val(ifqlen) 50 ;# max packet in ifq set val(nn) 75 ;# number of mobilenodes set stopTime 160
set val(rp) AOMDV ;# routing protocol set opt(x) 1250
set opt(y) 1250
set opt(mf) scenario.tcl
set topo [new Topography] $topo load_flatgrid $opt(x) $opt(y)
Gambar 2.11 : Potongan kode pengaturan lingkungan simulasi VANET
r 50.024225539 _57_ RTR --- 0 AOMDV 52 ↪ [0 ffffffff 3 800] ---
↪ [3:255 -1:255 28 0] [0x2 2 1 [57 0] [7 4]] ↪ (REQUEST)
s 50.024225539 _57_ RTR --- 0 AOMDV 52 [0 0 0 0]
↪ --- [57:255 7:255 30 3] [0x4 0 [57 2] 10.000000]
↪ (REPLY)
(b) Contoh paket RREP
s 67.000000000 _44_ RTR --- 0 AOMDV 32 [0 0 0 0] ↪ --- [44:255 -1:255 1 0] [0x8 1 [57 0] 0.000000] ↪ (ERROR)
(c) Contoh paket RRER
s 67.010233476 _7_ AGT --- 79 cbr 512 ↪ [0 0 0 0] --- [7:0 57:0 32 0] [79] 0 0
(d) Contoh paket data
23
3.
BAB III
PERANCANGAN
Perancangan merupakan bagian yang sangat penting dari implementasi sistem. Bab ini secara khusus akan menjelaskan rancangan sistem yang dibuat pada Tugas Akhir. Bagian yang akan dijelaskan pada bab ini berawal dari deskripsi umum hingga perencanaan skenario, alur dan implementasinya.
Deskripsi Umum
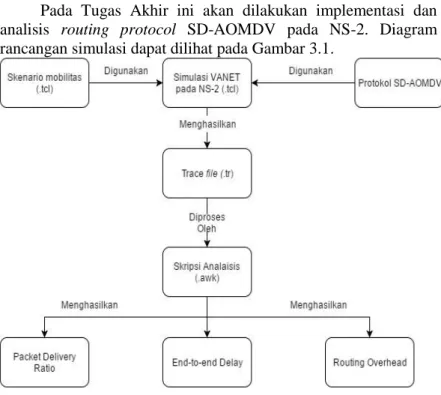
Pada Tugas Akhir ini akan dilakukan implementasi dan analisis routing protocol SD-AOMDV pada NS-2. Diagram rancangan simulasi dapat dilihat pada Gambar 3.1.
Gambar 3.1 : Diagram Alur Rancangan Simulasi
Dalam Tugas Akhir ini, terdapat 2 jenis skenario yang digunakan sebagai perbandingan pengukuran, yaitu peta berbentuk
grid dan peta riil. Skenario grid dibuat dengan bantuan aplikasi SUMO. Skenario riil yang didasarkan pada peta lalu lintas diambil dari OpenStreetMap dan dirapikan dengan menggunakan aplikasi JOSM. Setelah file peta sudah terbentuk, dilakukan simulasi lalu lintas dengan SUMO. Hasil simulasi SUMO digunakan untuk simulasi protokol SD-AOMDV pada NS-2. Kemudian hasil simulasi NS-2 dianalisis dengan menggunakan skrip AWK untuk menghitung metrik analisis berupa packet delivery ratio, average end-to-end delay, dan routing overhead. Perhitungan metrik analisis bertujuan untuk mengukur performa dari protokol AOMDV dan SD-AOMDV.
Perancangan Skenario Grid
Pembuatan peta grid diawali dengan menentukan panjang jalan dan jumlah vertex. Secara default, peta grid akan berbentuk segi empat. Alur pembuatan peta grid dapat dilihat pada Gambar 3.2.
Panjang jalan dan jumlah vertex yang sudah ditentukan akan dimasukkan sebagai argumen untuk netgenerate. Secara opsional, batas kecepatan untuk setiap jalan juga dapat ditentukan melalui argumen netgenerate. Kemudian hasil dari netgenerate digunakan sebagai argumen untuk randomTrips.py. Program randomTrips.py berfungsi untuk mendefinisikan rute perjalanan dari seluruh node. Keluaran dari random Trips.py diproses oleh dua router untuk memperbaiki masalah konektivitas rute (jika ada). Setelah itu dilakukan simulasi lalu lintas dengan SUMO.
Hasil dari simulasi tersebut di-export ke dalam format yang bisa diproses oleh NS-2 melalui traceExporter.py. Hasilnya berupa file yang berisi mobilitas dari setiap node (mobility.tcl) dan informasi lifetime dari setiap node (activity.tcl). Hasil dari netgenerate dapat dilihat pada Gambar 3.3.
Gambar 3.2 : Alur Pembuatan Skenario Grid
Perancangan Skenario Riil
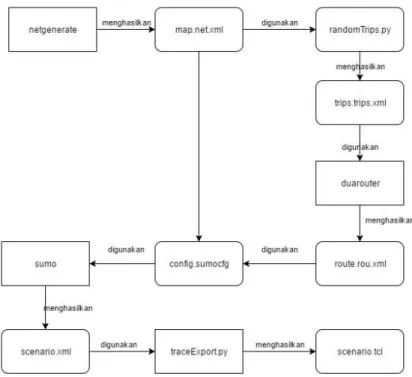
Perancangan skenario riil diawali dengan pemilihan daerah yang akan digunakan sebagai model untuk simulasi. Setelah mendapatkan daerah yang diinginkan, unduh daerah tersebut di situs OpenStreetMap melalui fitur export. Alur pembuatan peta riil dapat dilihat pada Gambar 3.4. Kemudian potongan peta tersebut dirapikan menggunakan program JOSM. Agar bisa semirip mungkin dengan dunia nyata, lakukan pengaturan pada interval lampu lalu lintas. Kemudian hapus jalan yang terputus dari potongan peta tersebut sehingga menjadi daerah yang tertutup.
Gambar 3.4 : Alur Pembuatan Skenario Riil
Setelah potongan peta dirapikan, buat sebuah type file yang mendefinisikan spesifikasi batasan simulasi lalu lintas, seperti batas kecepatan pada kelas jalan tertentu, dan lain-lain. Kemudian
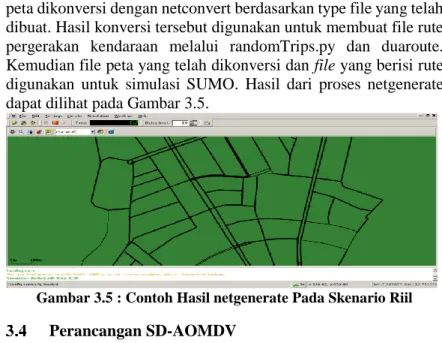
peta dikonversi dengan netconvert berdasarkan type file yang telah dibuat. Hasil konversi tersebut digunakan untuk membuat file rute pergerakan kendaraan melalui randomTrips.py dan duaroute. Kemudian file peta yang telah dikonversi dan file yang berisi rute digunakan untuk simulasi SUMO. Hasil dari proses netgenerate dapat dilihat pada Gambar 3.5.
Gambar 3.5 : Contoh Hasil netgenerate Pada Skenario Riil
Perancangan SD-AOMDV
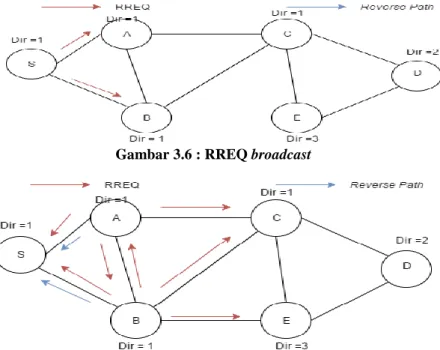
Dapat dilihat pada Gambar 3.6 source node S broadcast paket routing RREQ, seperti yang dilakukan source node di AOMDV setelah menetapkan nilai ke bidang baru sebagai berikut:
- SrcDir = arah node S - SpeedMetric = 0
- AvgSpeed = Rata- rata kecepatan dari source dan destionation node.
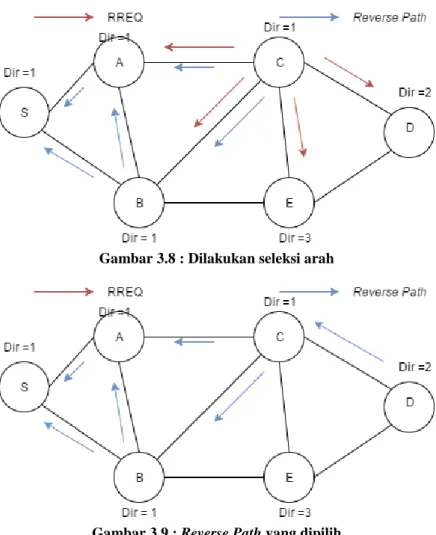
Ketika node lain menerima paket RREQ, mereka akan menetapkan atau memperbarui reverse path ke source node S sesuai dengan routing metric SD-AOMDV (hitungan speedmetric dan hop). Nodes lain ini dapat dikelompokkan menjadi dua jenis: intermediate node I dan destination node D. Jika merupakan intermediate node I maka akan membentuk reverse path I ~ S, setelah itu mencari routing table untuk forward path yang ada I ~ D ke destination node D. Jika path l ~ D ada maka node I memeriksa apakah memiliki arah yang sama dengan source dan/atau destination yang dapat dilihat pada Gambar 3.7 dan 3.8.
Jika node TRUE I drop paket RREQ dan paket RREP dikirim kembali ke S sepanjang reverse path. Jika intermediate node dan I ~ D tidak ada maka I akan rebroadcast paket RREQ. Jika destination node D menerima paket RREQ, D juga akan menetapkan reverse path ke source node S. Node D akan mengirimkan paket RREP ke node S.
Jika paket RREP diterima oleh intermediate node I kemudian memeriksa apakah ia memiliki arah yang sama dengan source dan/atau destination. Jika salah, node I drop paket RREP, selain itu paket RREP dikirim. Jika node I dibagi oleh disjoint-link path yang berbeda, node I akan memeriksa apakah ada reverse path yang tidak terpakai ke node S. Jika reverse path itu ada (Gambar 3.9), salah satu akan dipilih untuk meneruskan paket RREP; Jika tidak, paket RREP akan di-drop.
Gambar 3.6 : RREQ broadcast
Gambar 3.8 : Dilakukan seleksi arah
Gambar 3.9 : Reverse Path yang dipilih
3.4.1 Mobilitas Dan Menghitung Arah
SD-AOMDV menggunakan skenario Grid sebagai skenario mobilitas yang paling penting dalam VANET.
Dalam model skenario mobilitas Grid, beberapa jalan horizontal dan vertikal berdampingan di field simulasi dan node bergerakdi jalur yang ada. Setiap jalur memiliki 2 arah jalan. Jalur
dipastikan tidak tumpang tindih antara satu dan yang lainnya. Namun, jalan vertikal dan horizontal dapat memotong satu sama lain di persimpangan. Setiap jalan memiliki 2 arah jalur. Jika salah satu arah memiliki nilai 1 positif, arah sebaliknya memiliki nilai negatif -1. Setiap jalur memiliki kecepatan maksimal yang diizinkan.
Untuk menentukan nilai arah dari masing- masing kendaraan dalam SD-AOMDV, kendaraan diklasifikasikan keempat arah berdasarkan perubahan koordinat terhadap X dan Y. Jika perubahan X dan Y positif maka memiliki arah 1. Jika X negatif dan Y positif maka memiliki arah 2. Jika X negative dan Y negatif maka memiliki arah 3 dan jika X positif dan Y negative maka memiliki arah 4.
3.4.2 Struktur Data SD-AOMDV
SrcDir dan speedMetric ditambahkan sebagai fields baru pada struktur paket RREQ AOMDV yang dapat dilihat di Tabel 3.1.
Tabel 3.1 Struktur Paket RREQ SD-AOMDV
Source Sequence Number SrcDir
Jumlah Hop AvgSpeed
Destination Sequnce Number SpeedMetric
SrcDir = Arah Source, speedMetric = kecepatan intermediate node, AvgSpeed = Rata-rata kecepatan source dan destination
SrcDir, speedMetric dan DestDir ditambahkan sebagai fields baru pada struktur paket RREP AOMDV yang dapat dilihat pada Tabel 3.2.
Tabel 3.2 : Struktur Paket RREP SD-AOMDV
Source IP Adress Jumlah Hop
Destination IP Address SrcDir
Destination Sequence Number speedMetric
Last_hop DestDir
First_hop AvgSpeed
Perancangan Metrik Analisis
Berikut ini merupakan beberapa metrik yang dianalisis dalam Tugas Akhir ini:
3.5.1 Packet Delivery Ratio
Packet delivery ratio merupakan perbandingan dari jumlah paket data yang dikirim dengan paket data yang diterima. Packet delivery ratio dihitung menggunakan persamaan 3.1, di mana received adalah jumlah paket data yang diterima dan sent adalah jumlah paket data yang dikirim.
𝑷𝑫𝑹 (%) =
𝑫𝒂𝒕𝒂𝒓𝒆𝒄𝒆𝒊𝒗𝒆𝒅𝑫𝒂𝒕𝒂𝒔𝒆𝒏𝒕
Persamaan 3.1
3.5.2 Average End-to-End Delay
Average end-to-end delay adalah waktu rata-rata dari setiap paket ketika sampai di tujuan. Semua paket, termasuk delay yang diakibatkan oleh paket routing, juga akan diperhitungkan. Paket yang akan dimasukkan ke dalam perhitungn hanya paket yang berhasil sampai di tujuan. Average end-to-end delay dihitung
menggunakan persamaan 3.2 , dimana i adalah nomor paket yang berhasil sampai di tujuan, treceived [i] adalah waktu ketika paket i
dikirim, tsent [i] adalah waktu ketika paket i diterima, pktCounter
adalah jumlah paket yang berhasil sampai di tujuan.
𝑫𝒆𝒍𝒂𝒚 (𝒔) =
∑𝒏𝒊=𝟎𝒕𝒓𝒆𝒄𝒆𝒊𝒗𝒆𝒅[𝒊]−𝒕𝒔𝒆𝒏𝒕[𝒊]𝒑𝒌𝒕𝑪𝒐𝒖𝒏𝒕𝒆𝒓
Persamaan 3.2
3.5.3 Routing Overhead (RO)
Routing overhead merupakan jumlah paket routing control yang ditransmisikan selama simulasi terjadi. Paket kontrol yang dihitung adalah jumlah Router Request (RREQ), Route Reply (RREP), dan Route Error (RRER). Rumus dari routing overhead dapat dilihat pada persamaan 3.3.
𝑹𝑶 = 𝑹𝑹𝑬𝑸𝒔𝒆𝒏𝒕+ 𝑹𝑹𝑬𝑷𝒔𝒆𝒏𝒕+ 𝑹𝑹𝑬𝑹𝒔𝒆𝒏𝒕
33
4.
BAB IV
IMPLEMENTASI
Bab ini memberikan bahasan mengenai implementasi dari perancangan sistem yang dijelaskan pada bab sebelumnya.
Implementasi Skenario Grid
Skenario grid dibuat melalui tool netgenerate dari SUMO. Skenario grid dibuat dengan panjang jalan 200 m dan luas peta 1250 m x 1250 m. Jumlah titik persimpangan antara jalan vertikal dan horizal se banyak 6 titik x 6 titik. Kecepatan kendaraan yang diperbolehkan diatur sebesar 15 m/s.
Untuk membuat peta grid dengan spesifikasi tersebut, digunakan perintah seperti Gambar 4.1.
netgenerate --grid --grid.number=11
↪ --grid.length=100 --default.speed=30
↪--tls.guess=1 --output-file=map.net.xml
Gambar 4.1 : Perintah untuk membuat peta Grid
Gambar peta yang dibuat dengan netgenerate dapat dilihat pada Gambar 4.2
Setelah peta terbentuk, dilakukan pembuatan titik asal dan titik tujuan untuk setiap kendaraan secara acak melalui modul randomTrips.py seperti pada Gambar 4.3. Opsi -e diisi dengan jumlah kendaraan yang diinginkan dan --intermediate diisi dengan nilai yang besar agar setiap kendaraan memiliki banyak rute alternatif sehingga setiap kendaraan dapat dipastikan aktif hingga simulasi mobilitas berakhir.
Gambar 4.2: Hasil dari netgenerate
Setelah titik asal dan titik akhir didefinisikan, dilakukan pembuatan rute yang akan digunakan oleh kendaraan menggunakan perintah pada Gambar 4.4.
/usr/local/src/sumo 0.30.0/tools
↪/randomTrips.py –n map.net.xml -e 75 -l
↪--tripattributes="departLane=\"best\"
↪departSpeed=\"max\"departPos=\
↪"random_free\"" --o trip.trips.xml
Gambar 4.3: Perintah untuk membuat titik asal dan tujuan kendaraan
Selanjutnya dilakukan pembuatan file .sumocfg yang akan digunakan sebagai argumen perintah sumo. Gambar 4.5 menunjukkan isi dari file .sumocfg.
duarouter -n map.net.xml -t trip.trips.xml
↪-o route.rou.xml --ignore-errors --repair Gambar 4.4: Perintah untuk membuat rute kendaraan
File .sumocfg disimpan pada direktori yang sama dengan .net.xml dan .trips.xml. File .sumocfg digunakan untuk mendefinisikan lokasi file .net.xml dan .trips.xml serta durasi simulasi. Untuk melihat visualisasi simulasi lalu lintas, file sumocfg dapat dibuka melalui sumo-gui. Cuplikan pergerakan kendaraan dapat dilihat pada Gambar 4.6.
<?xml version="1.0" encoding="UTF-8"?> <configuration>
<input>
<net-file value="map.net.xml"/>
<route-files value="route.rou.xml"/>
</input> <time> <begin value="0"/> <end value="360"/> </time> </configuration>
Gambar 4.5: Isi dari berkas .sumocfg
Kemudian lakukan simulasi lalu lintas dengan perintah pada Gambar 4.7.
sumo -c file.sumocfg --fcd-output
↪simulation-result.xml
Gambar 4.6: Perintah untuk melakukan simulasi lalu lintas.
Agar dapat digunakan di NS-2, keluaran dari perintah sumo harus dikonversi ke format yang dapat dipahami oleh NS-2 melalui perintah pada Gambar 4.8.
/usr/local/src/sumo-0.30.0/tools/
↪traceExporter.py --fcd-input=scenario.xml
↪--ns2mobility-output=scenario.tcl
Gambar 4.7: Perintah untuk mengkonversi keluaran dari sumo ke format tcl
Gambar 4.8: Cuplikan Visualisasi Pergerakan kendaraan melalui sumo-gui
Implementasi Skenario Riil
Skenario riil menggunakan bagian peta wilayah kota Surabaya yang diambil dari OpenStreetMap. Peta diambil dengan cara membuat area seleksi wilayah kemudian diekspor dalam bentuk file .osm melalui. Peta yang telah diekspor dari OpenStreetMap kemudian disunting melalui program JOSM. Tujuan dari penyuntingan adalah untuk menghapus jalan yang tidak digunakan. Beberapa jalan baru juga ditambahkan agar tidak ada jalan yang buntu dan kepadatan jalan tetap stabil sehingga tidak ada daerah pada peta yang jarang dikunjungi oleh kendaraan.. Setelah proses penyuntingan peta selesai, peta tersebut dikonversi ke dalam format .net.xml menggunakan tool netconvert. Perintah konversi dapat dilihat pada Gambar 4.9. Untuk gambar dari cuplikan hasil netgenerate dapat di lihat pada Gambar 4.10.
Implementasi Protokol SD-AOMDV
Protokol SD-AOMDV merupakan modifikasi dari protocol AOMDV. Perubahan yang dilakukan pada implementasi protocol AOMDV antara lain :
Struktur data RREP
Struktur data RREQ
Penanganan paket RREP
Penanganan paket RREQ
netconvert --try-join-tls --osm-files
↪map.osm --output-file map.net.xml
↪--remove-edges.isolated
↪ --type-files specification.typ.xml
Gambar 4.10 : Gambar cuplikan map riil yang dihasilkan
Kode implementasi dari protokol AOMDV pada NS-2 versi 2.35 berada pada direktori ns2/aomdv. Daftar file dalam direktori tersebut di antara lain adalah aomdv.cc, aomdv.h, aomdv_logs.cc, aomdv_logs.h, aomdv_packet.h, aomdv_rqueue.cc, aomdv_rqueue.h, aomdv_rtable.cc, aomdv_rtable.cc. Dari file tersebut yang akan dimodifikasi antara lain:
aomdv_packet.h untuk mengubah struktur paket RREQ dan RREP.
aomdv_rtable.h dan aomdv_rtable.cc untuk mengubah perilaku dari routing table.
aomdv.cc dan aomdv.h untuk modifikasi penanganan RREQ dan RREP.
Pada bagian ini, penulis akan menjelaskan langkah-langkah dalam mengimplementasikan protokol SD-AOMDV dengan menggunakan protokol AOMDV sebagai dasarnya.
4.3.1 Modifikasi Struktur Paket RREQ
Source node tidak memiliki informasi routing ke tujuan di routing table menggunakan pesan RREQ. Dalam SD-AOMDV, terdapat 2 fields yang perlu ditambahkan ke dalam struktur paket RREQ, yaitu kecepatan dan arah resultan terhadap sumbu x dan y. Maka dari itu, ditambahkan atribut rq_speed, rq_dirX dan rq_dirY pada struct hdr_aomdv_request di skrip aomdv_packet.h seperti pada Gambar 4.11.
Gambar 4.11 : Penambahan Atribut Paket RREQ
4.3.2 Modifikasi Struktur Paket RREP
Sebuah intermediate node yang menerima balasan RREQ dengan balasan route reply jika memiliki rute yang valid ke alamat yang diminta atau itu merupakan destination itu sendiri. Dalam SD-AOMDV, terdapat 2 fields yang perlu ditambahkan ke dalam struktur paket RREP, yaitu kecepatan dan arah resultan terhadap
sumbu x dan y. Maka dari itu, ditambahkan atribut rp_speed, rp_dirX dan rp_dirY pada struct hdr_aomdv_reply di skrip aomdv_packet.h. Selain itu ditambakan juga atribut rq_dirX dan rq_dirY untuk menyimpan arah source node terhadap sumbu x dan y seperti pada Gambar 4.12.
Gambar 4.12 : Penambahan Atribut Paket RREP
4.3.3 Modifikasi Proses Pengiriman Paket RREQ
Modifikasi dari proses pengiriman RREQ dilakukan di fungsi sendRequest() pada skrip aomdv.cc seperti pada Gambar .
Sebelum mengirimkan arah source node menggunakan sendRequest(), arah yang berupa nilai resultan vektor harus didapatkan terlebih dulu. Untuk mendapatkan arah source node saat ini dibutuhkan sebuah obyek Mobilenode yang menunjukkan ke node ini. Pointer tersebut yang telah didefinisikan pada skrip
aomdv.h dapat digunakan untuk mendapatkan obyek dengan menggunakan kode :
<iNode=(MobileNode*)
(Node::get_node_by_address(index)) >
Selanjutnya arah source node didapatkan dengan menggunakan kode double dirX = iNode->dX() untuk mendapatkan arah source node terhadap sumbu X dan double dirY = iNode->dY() untuk mendapatkan arah source node terhadap sumbu Y. Lalu disimpan ke head rq->rq_dirX untuk arah terhadap sumbu X dan rq->rq_dirY untuk arah terhadap sumbu Y. Arah yang didapatkan ini nantinya akan digunakan dalam struktur paket RREQ.
4.3.4 Modifikasi Proses Penerimaan Paket RREQ
Fungsi yang bertugas untuk mengatur proses penerimaan paket RREQ adalah fungsi void AOMDV::recvRequest(Packet *p) pada AOMDV maupun SD-AOMDV, pada SD-AOMDV dilakukan proses mendapatkan arah dari intermediate node yang didapatkan dengan menggunakan kode iNode = (MobileNode*) (Node::get_node_by_address(index)) yang selanjutnya didapatkan arah intermediate node dengan menggunakan kode double dX_N = iNode->dX() untuk arah intermediate node terhadap sumbu X dan double dY_N = iNode->dY() untuk arah intermediate node terhadap sumbu Y. Perbedaan variabel antara variabel source node dan intermediate node ini akan digunakan untuk memastikan bahwa hanya intermediate node yang memiliki arah yang sama dengan source node. Arah intermediate node sama dengan arah source node digunakan untuk menentukan pemilihan reverse path.
Dibutuhkan juga kecepatan dari intermediate node yang akan dimasukan ke dalam route list entry data melalui reverse path. Untuk mendapatkan kecepatan digunakan juga obyek Mobilnode. Untuk mendapatkan kecepatan digunakan kode double speedMatric = ((MobileNode*) iNode)->speed(). Selain itu, arah dari node akan dikirim ke RREP melewati fungsi sendReply(). Implementasi dalam kode C++ dapat dilihat dalam lampiran A.7. 4.3.5 Modifikasi Proses Pengiriman Paket RREP
Modifikasi dari proses pengiriman RREP dilakukan di fungsi sendReply() pada skrip aomdv.cc seperti pada Gambar 4.13.
Gambar 4.14 : Modifikasi Proses Pengiriman Paket RREP
4.3.6 Modifikasi Proses Penerimaan Paket RREP
Sebelum mengirimkan arah source node dan destination node menggunakan sendReply(), arah yang berupa nilai resultan vektor harus didapatkan terlebih dulu. Untuk mendapatkan arah destination node saat ini dibutuhkan sebuah obyek Mobilenode yang menunjukkan ke node ini. Pointer tersebut yang telah didefinisikan pada skrip aomdv.h dapat digunakan untuk mendapatkan obyek dengan menggunakan kode:
<iNode=(MobileNode*)
(Node::get_node_by_address(index))>
Selanjutnya arah source node didapatkan dengan menggunakan kode double dirX = iNode->dX() untuk
mendapatkan arah source node terhadap sumbu X dan double dirY = iNode->dY() untuk mendapatkan arah source node terhadap sumbu Y. Lalu disimpan ke rp->rp_dirX untuk arah terhadap sumbu X dan rp->rp_dirY untuk arah terhadap sumbu Y. Selain itu, arah source node yang didapatkan dari RREQ disimpan dalam rp->rq_dirX untuk arah terhadap sumbu X dan rp->rq_dirY untuk arah terhadap sumbu Y. Arah source node dan destination node yang didapatkan ini nantinya akan digunakan dalam struktur paket RREP. Gambaran perubahan fungsi sendReply() yang dilakukan dapat dilihat pada Gambar 4.15, sedangkan perubahan secara lengkap yang dilakukan pada fungsi tersebut dapat diliat pada lampiran A.6.
Input: rrep
seqnumber ← sequence of rrep;
speedMatricdiff ← minimum diff (speed of I, avg_speed S and D);
SrcDir ← Direction of source node; DestDir ← Direction of destination node; Dir ← Direction of intermediate node;
if rt_entry == 0 then
rt_entry ← rt_add(rtable, destination);
end
if seqnumber > seqnumberlast&(Dir == SrcDir | Dir == DestDir) then
rt__clear(rt_entry); rt_add(rt_entry, rrep);
speedMatricdiff ← speedMatric; end
if seqnumber == seqnumberlast & (Dir == SrcDir | Dir == DestDir)
rt_add(rt_entry,rrep);
speedMatricdiff ← speedMatric; end
Gambar 4.15 : Pseudocode Dalam Memproses RREP Yang Diterima
Implementasi Metrik Analisis
Hasil dari simulasi scenario pada NS-2 adalah tracefile(.tr) yang berisi data berupa plain text. Data tersebut akan penulis gunakan untuk menganalisis performa dari routing protocol yang disimulasikan. Tiga buah metrik akan dijadikan parameter analisis adalah packet delivery ratio, routing overhead dan end-to-end delay.
4.4.1 Implementasi Packet Deliver Ratio
Packet delivery ratio adalah rasio dari packet yang berhasil dikirimkan ke destination dibagi dengan jumlah paket yang telah dikirimkan oleh source. Skrip awk untuk menghitung PDR dapat dilihat pada lampiran.
Pada skrip tersebut dilakukan penyaringan untuk baris yang berisikan AGT karena event yang berisikan AGT berhubungan dengan paket data. Paket data yang berhasil dikirim ke destination dan jumlah paket yang dikirrimkan oleh source dibedakan pada kolom pertama yang telah disaring. Selanjutnya nilai PDR didapatkan dari perhitungan persamaan yang telah dijelaskan.
Contoh perintah awk untuk mendapatkan packet delivery ratio dapat dilihat pada Gambar 4.16.
awk –f PDR.awk sd-aomdv.tr
Gambar 4.16: Perintah untuk menjalankan skrip awk untuk menghitung PDR.
cbr s:490 r:463, r/s Ratio:0.9449, f:419344 Gambar 4.17: Hasil dari skrip PDR.awk
4.4.2 Impelementasi Routing Overhead
Routing Overhead merupakan jumlah paket routing yang dibutuhkan untuk komunikasi jaringan. Routing overhead dapat dihitung dengan cara menyaring baris yang berisikan kata REQUEST, REPLY, ERROR. Setiap tiga kata tersebut ditemukan dalam sebuah baris akan dilakukan increment untuk menghitung paket routing yang ada pada komunikasi jaringan. Skrip implementasi dari routing overhead dapat dilihat di lampiran.
Contoh perintah awk untuk mendapatkan routing overhead dapat dilihat pada Gamba 4.18.
awk –f routing_overhead.awk sd-aomdv.tr
Gambar 4.18: Perintah untuk menjalankan skrip awk untuk menghitung routing overhead.
Overhead: 254
Gambar 4.19: Hasil dari skrip routing_overhead.awk
4.4.3 Implementasi Average End-to-end Delay
Waktu rata-rata yang diambil dari paket data dari source sampai di destination. Ini juga termasuk penundaan yang disebabkan oleh proses pencarian route dan antrian dalam transmisi paket data. Hanya paket data yang berhasil dikirim ke destinasi yang dihitung.
Delay setiap paket dihitung dengan cara mengurangi waktu penerimaan (CBRRecvTime) dan pengiriman (CBRSentTime) dan membaginya dengan jumlah totoal transmisi CBR.