Desain Sistem Kontrol Functional Electrical Stimulation
menggunakan Fuzzy orde 2
Hendi Wicaksono Agung D
1,3, Achmad Arifin, Ph.D
2.
(1) Program Pasca Sarjana Jurusan Teknik Elektro Bidang Studi Elektronika
Institut Teknologi Sepuluh Nopember, Surabaya
(2)Jurusan Teknik Elektro Bidang Studi Elektronika
Institut Teknologi Sepuluh Nopember, Surabaya Email : [email protected]
(3)Fakultas Teknik, Jurusan Teknik Elektro, Universitas Surabaya
Raya Kalirungkut Surabaya 60293 Email : [email protected]
Abstrak. FLC sudah diakui dapat dijadikan solusi kontrol dari sistem nonlinear. Fuzzy set
dengan lebar interval tertentu dapat menyelesaikan hampir semua masalah kontrol sistem nonlinear. Dengan keinginan selalu mengoptimalkan sistem kontrol, beberapa tahun terakhir mulai dikembangkan fuzzy orde 2 dengan tingkat ketidakpastian (uncertainty) lebih tinggi dibandingkan fuzzy biasa atau fuzzy orde 1. Fuzzy orde 2 mengolah data input berupa error, dan menghasilkan data output berupa besaran time burst FES. FES digunakan sebagai penstimulasi otot sistem musculoskeletal pada rehabilitasi kemampuan kontraksi otot.
Kata kunci : Fuzzy orde 2, FES, Fuzzy Logic Controller, sistem musculoskeletal.
1. Pendahuluan
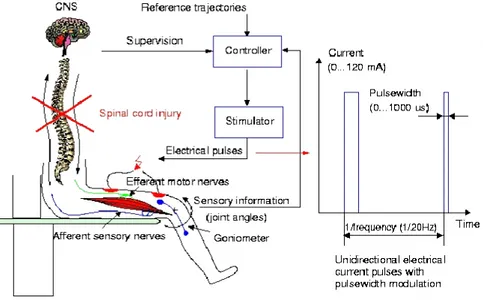
Gangguan pada syaraf disebabkan ketidakhadiran dari impuls syaraf atau terjadi kegagalan dalam pencapaian tempat yang biasa dituju. Seperti pada penderita stroke dan spinal cord injury menyebabkan penderita tidak mampu mengaktifkan perangkat syaraf dan otot secara sukarela. Dengan kerusakan perangkat syaraf menyebabkan suatu aksi yang tidak normal, bahkan tidak menghasilkan aksi tertentu.
Electrical Stimulation pada otot adalah suatu terapi berharga untuk memperkuat kontraksi otot dan
pengendali rasa sakit. ES yang didesain untuk memperbaiki fungsi kerja dari organ tubuh dikenal dengan nama Functional Electrical Stimulation (FES), seperti salah satu contoh FES untuk memperbaiki kinerja jantung memompa darah. Struktur dari serat-serat pembentuk otot tidak homogen maka perlu dipelajari sifat dari kekenyalan otot agar dapat didesain FES disesuaikan dengan sifat kekenyalan otot.
Telah diketahui secara fisiologi syaraf bahwa syaraf mengirimkan informasi menggunakan sistem
impuls. Pada perawatan klinis, stimulasi listrik berfrekuensi 10 Hz (kontraksi lambat) dan juga 50-100 Hz
(kontraksi cepat) didesain menggantikan impuls yang dihasilkan oleh syaraf untuk mengirimkan informasi. Dengan bentuk berupa impuls, maka stimulasi listrik juga harus diprogram untuk membentuk
impuls-impuls listrik. Impuls diprogram berupa level tegangan positif dengan lebar 1 us sampai 1 ms.
Bentuk dan spesifikasi dari FES ini sudah umum digunakan dan dipublikasikan. Pada Gambar 1 dapat bagaimana spesifikasi bentuk FES yang digunakan oleh para peneliti bidang rehabilitation engineering.
Achmad Arifin, 2005, telah mendesain computer simulation sistem kontrol fuzzy, dan sistem kontrol PID untuk melihat unjuk kerja tiap sistem kontrol pada metode cycle-to-cycle. Sistem kontrol
fuzzy yang telah didesain dibedakan lagi menjadi 2 jenis sistem kontrol, yaitu sistem kontrol fuzzy dengan fuzzy rule set tetap, dan sistem kontrol dengan fuzzy rule set dapat berubah-ubah yang biasa dikenal
dengan adaptive fuzzy. Kesimpulan dari computer simulation yang telah dibuat ini bahwa dengan menggunakan adaptive fuzzy tingkat osilasi bisa diredam hanya saja memang masih ada osilasi di titik-titik tertentu. Hal ini menandakan semakin tinggi tingkat ketidakpastian dari sistem fuzzy akan membuat performansi dari sistem kontrol pada metode cycle-to-cycle semakin baik. Oleh karena itu, pada paper ini
akan didesain sistem kontrol fuzzy dengan orde yang lebih tinggi yakni fuzzy orde 2.
2. Fuzzy Orde 2
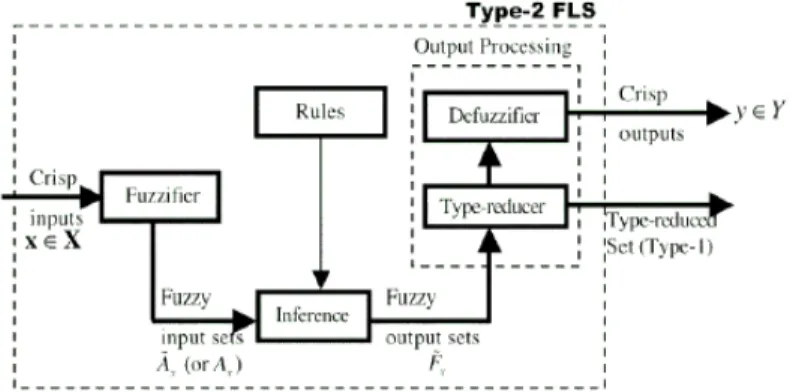
Secara struktur, fuzzy orde 2 tidak jauh berbeda dibandingkan fuzzy orde 1. Struktur dari fuzzy orde 1 terdiri dari fuzzifier, inference, rules, dan defuzzifier yang dapat dilihat pada Gambar 2, sedangkan struktur dari fuzzy orde 2 terdiri dari fuzzifier, inference, rules, type reducer dan defuzzifier yang dapat dilihat pada Gambar 3. Dari Gambar 2 dan Gambar 3, terlihat sebuah perbedaan, bahwa fuzzy orde 2 mempunyai blok yang dinamakan type reducer.
Membership function fuzzy orde 2 terbentuk lebih dari 1 membership function fuzzy orde 1. Membership function fuzzy orde 2 mempunyai 2 batas, yaitu LMF (Lower Membership Function) dan
UMF (Upper Membership Function). LMF maupun UMF merupakan membership function fuzzy orde 1. Perhatikan ilustrasi pada Gambar 4. UMF dinotasikan dengan
μ
A
x
, sedangkan LMF dinotasikan denganμ
A
x
. Pada Gambar 4, kita lihat pada sistem membership function fuzzy orde 2 mempunyai FOU yang tidak dimiliki oleh fuzzy orde 1. Dimana dengan FOU ini, meningkatkan derajat ketidakpastian dari fuzzy orde 2 sehingga dimungkinkan untuk dapat menjadi solusi yang lebih baik untuk sistem nonlinear.Gambar 1. Bagan FES.
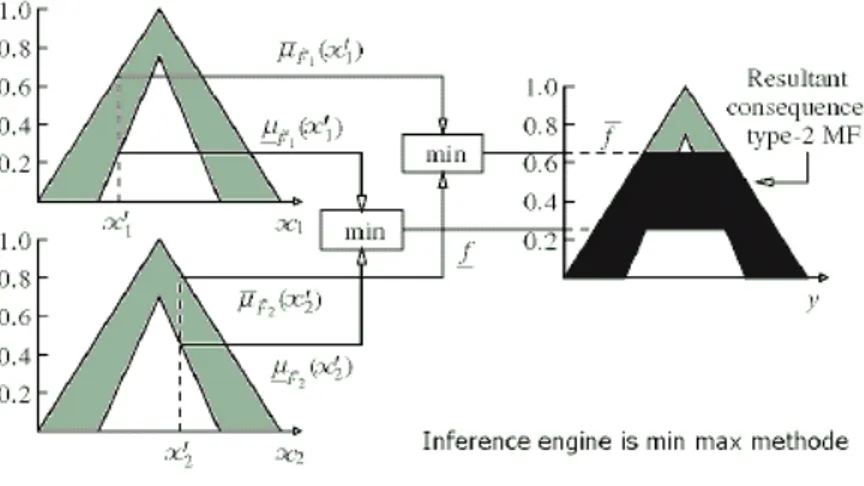
Setiap nilai crisp input pada fuzzy orde 2 mempunyai 2 nilai derajat membership function. Ilustrasi dapat lebih jelas dilihat pada Gambar 5. Fuzzy orde 2 mempunyai model fuzzy relation sama dengan fuzzy orde 1, seperti Max Min Method, Cosine Amplitude, dan beberapa lainnya. Setelah didesain fuzzy rules berdasarkan pengalaman dan tingkat expertise dari fuzzy desainer, kemudian masuk pada bagian inference. Pada bagian inference, dilakukan teknik dari fuzzy relations seperti max min method untuk 2 buah MF dari masing-masing nilai crisp input. Berikut contoh ilustrasi proses inference fuzzy orde 2 dapat dilihat pada Gambar 6.
Setelah didapat nilai dari aggregate fuzzy output dari proses inference, kemudian dilakukan proses
defuzzification. Namun karena hasil aggregate fuzzy output masih berorde 2, maka perlu dilakukan proses type reducer. Proses type reducer merupakan proses kalkulasi yang cukup kompleks bila diterapkan pada
aplikasi praktis. Menurut Bob John, Centre for Computational Intelligence School of Computing, De Montfort University, UK, untuk aplikasi praktis proses type reducer dan proses defuzzification digantikan dengan proses Direct Defuzzifier dimana pada proses ini dilakukan pendekatan secara diskrit.
Gambar 4. Footprint Of Uncertainty (FOU) Fuzzy Orde 2. Gambar 3. Struktur Fuzzy Orde 2.
Berikut persamaan dari direct defuzzifier dengan pendekatan secara diskrit. Dengan persamaan (1), maka proses defuzzification tidak perlu melakukan proses type reducer seperti pada proses defuzzification secara kontinyu.
COA
A=
∑
i=0 mμ
A
x
i
⋅
x
i
∑
i=0 nμ
A
x
i
⋅
x
i∑
i= 0 mμ
A
x
i
∑
i=0 nμ
A
x
i
1
3. Desain Fuzzy Orde 2.
Berikut diagram blok dasar secara keseluruhan yang berisikan FLC dan plant. Sudut target sebagai input sistem sedangkan besaran error sebagai input FLC, dan sudut yang akan dihasilkan dari plant akan menjadi umpan balik untuk menghasilkan error setelah didapat selisih antara sudut yang dihasilkan dengan sudut target. Output dari fuzzy orde 2 berupa time burst yang menjadi parameter pengaturan FES. FES akan diberikan ke sistem musculo-skeletal melalui surface electrode. Setelah distimulasi dengan FES, didapat sudut dari sensor goniometer yang dipasangkan pada sistem musculo-skeletal.
Fuzzy orde 2 didesain melalui 5 tahap desain, yaitu mendefinisikan input, menentukan fuzzy membership function, mendesain fuzzy rules, melakukan fuzzy inference, dan melakukan proses defuzzification.
1. Mendefinisikan input.
Posisi joint saat permulaan diasumsikan tetap. Pada paper ini, FLC mengontrol parameter FES dari pola gerakan knee joint extension. Otot yang harus distimulasi untuk menghasilkan pergerakan tersebut adalah otot rectus femoris dan vastus. Sehingga Fuzzy controller untuk rectus
femoris dan vastus muscle didesain sebagai MISO (Multiple Input Single Output). Input untuk
tiap MISO adalah error[n-1], dan desired range[n] dari sudut joint. Desired range untuk sudut
knee extension didefinisikan sebagai perbedaan antara sudut maksimum dari knee extension pada
siklus saat ini dengan sudut target maksimum knee extension. Error didefinisikan perbedaan antara sudut target dengan sudut yang diinginkan dari joint. Sudut awal joint untuk knee
extension bervariasi untuk tiap siklusnya.
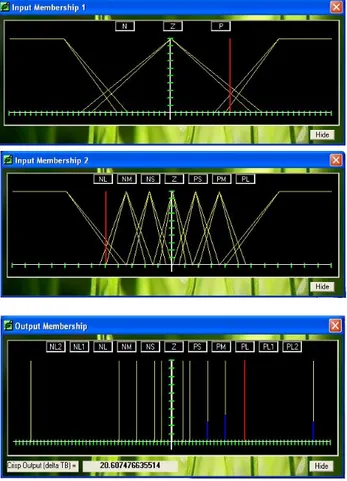
2. Menentukan fuzzy membership function.
Output membership function diekspresikan sebagai fuzzy singleton. Sedangkan input membership
function diekspresikan sebagai triangular dan trapezoid fuzzy set. Berikut bisa dilihat linguistic term dari input dan output.
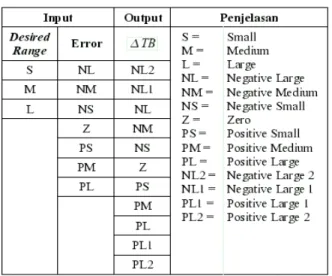
3. Mendesain fuzzy rules.
Fuzzy rules dapat dilihat melalui tabel berikut ini. 4. Melakukan fuzzy inference.
Fuzzy inference dilakukan dengan metode min-max.
5. Melakukan proses defuzzification.
Dilakukan dengan persamaan (1).
Gambar 7. Diagram Blok Dasar.
Gambar 8. Diagram Blok FLC.
Gambar 9. Diagram Blok Plant.
4. Soft Computing Fuzzy Orde 2.
Soft computing dikerjakan pada salah satu bahasa pemrograman tergolong high language.
Dikerjakan dalam beberapa langkah berikut:
1.
Pengaturan parameter dan jumlah membership function.2.
Penggambaran struktur triangle dan trapezoid tiap-tiap MF dari kedua input dan output.3.
Penghitungan derajat LMF dan UMF dari nilai crisp input.4.
Proses defuzzification.5. Menampilkan derajat output MF.
Tabel 2. Fuzzy Rules.
5. Daftar Pustaka
1.
N. N. Karnik and J. M. Mendel, “Introduction to Type-2 Fuzzy Logic Systems,” presented atIEEE FUZZ Conf., Anchorage, AK, May 1998.
2.
Karnik, N. N., J. M. Mendel and Q. Liang, “Type-2 Fuzzy Logic Systems,” IEEE Trans. onFuzzy Systems, vol. 7, pp. 643-658, Dec. 1999.
3.
Arifin, Achmad, Watanebe, Takashi, Hoshimiya, Nozomu, “Computer Simulation Test of FuzzyController for the Cycle-to-Cycle Control of Knee Joint Movements of Swing Phase of FES Gait,”
IEICE Trans.Information and Systems, vol E88-D, No.7, pp.1763-1766, 2005.
4.
Arifin, Achmad, Watanebe, Takashi, Hoshimiya, Nozomu, “Design of Fuzzy Controller of theCycle-to-Cycle Control for Swing Phase of Hemiplegic Gait Induced by FES,” IEICE Trans.Information and Systems, vol E89-D, No.4, pp.1525-1533, 2006.