BAB I
PENDAHULUAN
I. 1. Latar Belakang
Candi Borobudur adalah bangunan yang memiliki nilai historis tinggi. Bangunan ini menjadi warisan budaya bangsa Indonesia maupun warisan dunia. Candi yang didirikan pada abad ke-8 yaitu pada masa pemerintahan Dinasti Syailendra ini mempunyai potensi untuk menarik para wisatawan asing maupun domestik, sehingga dapat memberikan devisa bagi negara. Oleh karena itu diperlukan pemeliharaan bangunan candi yang intensif untuk mencegah kerusakan bangunan. Dalam rangka pemeliharaan ini Balai Konservasi Peninggalan Borobudur (BKPB) melakukan pemantauan stabilitas candi secara periodik antara lain dengan pengamatan geodetik pada jaring pemantauan deformasi yang berada di area candi Borobudur.
Pengamatan geodetik pada jaring pemantauan deformasi yang berada di area candi Borobudur dilaksanakan dengan pemantauan jaring poligon untuk meneliti deformasi horisontal candi Borobudur. Pemantauan deformasi horisontal candi Borobudur dilaksanakan pada titik-titik pemantau yang tersebar di halaman, koridor dan area di sekitar stupa pusat dan beberapa titik tangga yang digunakan sebagai penghubung antar jaring poligon. Titik-titik pemantau yang membentuk poligon tertutup ini diukur secara periodik dengan interval waktu pengamatan satu tahun.
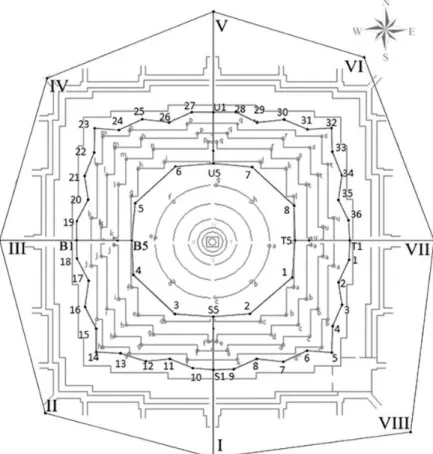
Pengamatan deformasi horisontal secara periodik dilakukan dengan pengukuran sudut dan jarak dari setiap sisi-sisi pada poligon dengan desain jaring poligon yang ditunjukkan pada gambar I.1. Desain jaring poligon tertutup memiliki titik awal dan akhir pada satu titik referensi yang sama yaitu titik PIII-1. Dengan menggunakan satu azimut referensi pada titik referensi tersebut, sehingga hasil ukuran sudut dan jarak pada pengukuran poligon sudah dapat dikontrol melalui bentuk geometrinya. Proses penentuan posisi 2D menggunakan metode Bowdith, sehingga data posisi yang didapat hanya berupa posisi 2D tanpa disertai dengan simpangan baku dari posisi yang diestimasi. Apabila hasil estimasi posisi hanya digunakan untuk mencari nilai koordinat titik-titik dalam poligon maka metode
Bowdith pada perhitungan jaring poligon tertutup ini dapat digunakan, namun apabila digunakan untuk analisis deformasi horisontal metode ini kurang sesuai. Salah satu alasan kurang sesuainya metode ini adalah jika ada data ukuran yang masih mengandung kesalahan tak acak maka kesalahan dari salah satu atau beberapa data ukuran ini dibagikan secara merata kepada masing-masing ukuran yang terlibat pada pengukuran poligon tertutup, sehingga tidak akan diketahui mana data ukuran yang seharusnya tidak digunakan untuk proses estimasi nilai koordinat.
Gambar I. 1. Sketsa jaring pemantauan deformasi horisontal candi Borobudur (Sumarno, 2012)
Selain metode Bowdith dikenal beberapa metode hitung perataan dalam proses estimasi nilai koordinat; salah satunya adalah hitung perataan kuadrat terkecil metode parameter. Pada metode ini nilai pengukuran yang didapat menjadi fungsi dari parameter yaitu besaran yang akan dicari nilainya yaitu koordinat 2D. Beberapa kelebihan yang didapat dari metode ini adalah terhadap data ukuran yang digunakan dapat dilakukan uji statistik, sehingga data ukuran yang masih mengandung
kesalahan tak acak dapat dihilangkan dan tidak digunakan pada proses hitungan dan dengan demikian nilai estimasi koordinat 2D yang didapatkan menjadi lebih handal.
Proses hitung kuadrat terkecil metode parameter menuntut adanya data ukuran lebih pada proses perhitungannya, karena nilai estimasi koordinat yang didapat akan menjadi lebih presisi jika dibandingkan dengan hanya sedikit data ukuran yang digunakan untuk mengestimasi nilai koordinat. Pada bentuk jaring pemantauan poligon tertutup data ukuran lebih menjadi terbatas dikarenakan jumlah parameter dan jumlah ukuran yang hampir sama, sehingga posisi nilai koordinat yang didapatkan menjadi kurang presisi. Selain itu, apabila ada satu atau beberapa data ukuran yang memiliki kesalahan tak acak dan dihilangkan pada proses perhitungan maka proses hitungan estimasi posisi akan menjadi terganggu, sehingga data ukuran yang mengandung kesalahan tak acak ini tetap akan digunakan dalam proses estimasi nilai koordinat. Adanya kelemahan ini tidak disebabkan oleh pengaruh metode hitungan yang digunakan namun pada bentuk geometri poligon tertutup yang kurang sesuai jika dilakukan proses perhitungan dengan metode parameter. Oleh karena itu, perlu dilakukan penelitian untuk mengetahui kualitas jaring pemantauan deformasi horisontal.
Pada tahun 2012 dilaksanakan pengukuran dengan desain jaring pemantauan yang berbeda dengan desain jaring tahun 2011 (yang menggunakan model jaring pemantauan poligon tertutup). Perbedaanya terletak pada (1) spesifikasi alat yang digunakan untuk melakukan pengambilan data ukuran jarak dan sudut; (2) penambahan titik referensi pada proses perhitungan estimasi nilai koordinat dan pada (3) bentuk geometri jaring pemantauan, sehingga dengan mengacu pada ketiga hal ini maka analisis kualitas jaring pemantauan dilakukan. Untuk melihat pengaruh ketiga hal diatas, pada proses analisis kualitas jaring digunakanlah elips kesalahan untuk melihat tingkat kepresisian dari beberapa titik yang dihitung pada setiap desain jaring perhitungan. Dengan melihat ukuran dan bentuk elips kesalahan yang terjadi maka analisis kualitas dari desain jaring dapat dilakukan. Setelah melakukan analisis kualitas jaring pemantauan, maka untuk titik-titik pantau yang sama pada kedua kala pengamatan dapat dilakukan analisis deformasi horisontal agar dapat diketahui apakah ada pergeseran antara tahun 2011 dan 2012.
I.2. Rumusan Masalah
Masalah yang dikaji dalam penelitian ini yaitu:
1. Pada bentuk poligon tertutup ada kendala dalam proses hitung perataan dengan hitung kuadrat terkecil dikarenakan kurangnya data ukuran lebih. 2. Perbedaan ketelitian alat saat pengukuran dan adanya perubahan bentuk
geometri pada jaring pemantau tahun 2011 dan 2012 akan berpengaruh pada tingkat kualitas jaring pemantau.
3. Deformasi horisontal dapat terjadi antara dua kala pengamatan yang berbeda, yaitu pada tahun 2011 dan tahun 2012.
I.3. Pertanyaan Penelitian
Dari kedua uraian pada rumusan masalah di atas, maka didapat suatu pertanyaan sebagai dasar dari penelitian ini, yaitu:
1. Bagaimana pengaruh masing-masing faktor kualitas jaring yaitu ketelitian alat saat pengukuran, penambahan jumlah titik ikat dan perubahan bentuk geometri jaring pemantau terhadap sudut orientasi dan dimensi dari elips kesalahan pada masing-masing titik pemantau dalam desain jaring?
2. Pada titik-titik pemantau yang sama pada jaring deformasi horisontal candi Borobudur tahun 2011 dan tahun 2012, adakah deformasi horisontal yang terjadi pada selang waktu tersebut?
I.4. Cakupan Penelitian
Dalam penelitian ini, peneliti akan membatasi permasalahan yang ada dengan memberikan cakupan sebagai berikut:
1. Pada penelitian ini titik ikat yang digunakan adalah titik – titik yang diperoleh dengan pengukuran GPS yang diasumsikan tidak mengalami pergeseran.
2. Analisis kualitas desain jaring menggunakan nilai dari hasil perhitungan elips kesalahan.
3. Analisis deformasi horisontal dilakukan dengan uji pergeseran titik yang dilakukan pada titik-titik pengamatan yang sama pada tahun 2011 dan 2012.
I.5. Tujuan
Tujuan diadakannya penelitian ini adalah:
1. Untuk mengetahui kualitas desain jaring pemantauan deformasi horisontal candi Borobudur pada tahun 2011 dan 2012.
2. Untuk mengetahui besar pergeseran secara horisontal titik–titik pantau pada jaring pemantauan candi Borobudur antara tahun 2011 dan tahun 2012.
I.6. Manfaat
Manfaat dari penelitian ini adalah untuk mengetahui kualitas dari desain jaring pemantauan horisontal candi Borobudur yang akan digunakan untuk studi deformasi. Pentingnya studi deformasi adalah untuk mengetahui adanya pergeseran dari bangunan candi yang diwakili dengan pengamatan terhadap titik-titik pantau yang ada di sekitar halaman candi maupun titik-titik yang ada di bagian dalam candi Borobudur, sehingga diharapkan penelitian ini dapat memberikan kontribusi terhadap upaya pelestarian peninggalan budaya bangsa. Selain itu, penelitian ini juga diharapkan dapat memberikan kontribusi positif dalam upaya pengembangan suatu metode yang mampu memberikan hasil yang dapat diandalkan dalam analisis deformasi.
I.7. Tinjauan Pustaka
Wijayatmo (2011) melakukan studi kehandalan jaring horisontal dengan objek pengamatan adalah titik-titik pantau yang ada pada bendungan Sermo. Analisis kehandalan jaring dilakukan dengan menggunakan 5 titik pantau dengan satu titik pantau digunakan sebagai titik referensi yang diketahui koordinatnya. Dalam penelitian tersebut dijelaskan bahwa semakin baik ketelitian koordinat yang dilihat dari bentuk dan ukuran elips kesalahan dalam suatu desain jaring, maka desain jaring yang dihasilkan akan memiliki tingkat kehandalan yang tinggi. Dalam penelitian ini juga dapat diketahui bahwa untuk meningkatkan kehandalan jaring horisontal maka diperlukan data ukuran yang teliti, sehingga semakin banyak data ukuran yang mengandung kesalahan, maka akan semakin buruk kualitas jaring horisontal yang dihasilkan.
Simkooei, dkk (2012) melakukan penelitian mengenai analisis kualitas jaring yang dilihat dari presisi dan kehandalan jaring horisontal. Dalam penelitian ini digunakan beberapa bentuk desain jaring kontrol horisontal pada pekerjaan pemetaan seperti poligon, jaringan triangulasi dan juga jaringan trilaterasi. Hasil penelitian menunjukkan bahwa untuk menghasilkan jaring yang handal dan presisi, maka diperlukan optimasi terhadap konfigurasi jaring, ketelitian pengamatan dan juga bentuk geometri untuk setiap desain dari jaring horisontal yang akan dibuat.
Widyaningsih, (2006) melakukan penelitian dengan menggunakan data pengukuran jaring triangulasi untuk kurun waktu tahun 2001, 2002, dan 2004. Metode yang digunakan adalah analisis dengan metode hitung perataan terpisah pada masing-masing kala pengamatan. Pada penelitian ini titik yang tersebar tidak mempunyai referensi yang dianggap tetap karena semua dianggap masuk dalam area yang terdeformasi dan metode perataan yang digunakan adalah metode perataan jaring bebas. Pada penelitian ini titik I pada poligon tiga dianggap sebagai titik yang tetap dan azimut pada titik ini dianggap nol untuk memenuhi syarat minimum
constraint.
Sumarno, (2012) melakukan analisis pergeseran horisontal jaring pemantauan deformasi horisontal dengan kala pengamatan adalah tahun 2004, 2006 dan tahun 2008. Analisis deformasi horisontal dilakukan pada titik-titik pemantau yang ada pada jaring poligon di halaman sekitar candi Borobudur sampai titik-titik pemantau yang ada pada halaman stupa candi Borobudur (tiga jaring poligon yaitu poligon III, poligon lorong I, dan poligon V atau poligon halaman stupa candi). Analisis deformasi horisontal menggunakan tingkat kepercayaan sebesar 99%, hal ini dikarenakan ada banyak data ukuran yang dihinggapi kesalahan tak acak. Dari analisis deformasi horisontal yang telah dilakukan didapatkan hasil bahwa selama selang waktu antara tahun 2004 sampai dengan tahun 2006 tidak ada titik-titik pemantau yang mengalami pergeseran horisontal.
Lestari dan Widjajanti, (2012) melakukan evaluasi kekuatan geometri jaring pemantau deformasi horisontal candi Borobudur dengan melakukan analisis terhadap jaring tahun 2011 dan tahun 2012. Pada penelitian ini digunakan analisis kekuatan geometri dengan menggunakan korelasi antar titik pemantau di kedua kala
pengamatan. Hasilnya, bentuk jaring poligon tertutup dengan hanya menggunakan satu titik referensi merupakan bentuk jaring yang lemah, karena sesuai dengan analisis yang dilakukan hampir semua nilai korelasi antar titik-titik pemantau pada poligon tertutup bernilai mendekati +1 atau -1.
I.8. Landasan Teori I.8.1. Poligon tertutup
Ada beberapa metode dalam penentuan kerangka kontrol horisontal tetapi metode poligon atau traverse adalah metode yang paling sering untuk digunakan. Ada berbagai macam bentuk poligon dan salah satu kriteria dari penentuan kerangka dasar pengukuran dengan metode poligon adalah berdasarkan bentuk dari poligon yaitu poligon terbuka, tertutup dan poligon cabang. Poligon tertutup adalah rangkaian titik-titik secara berurutan sebagai kerangka dasar pengukuran dengan titik awal dan akhir pengukuran adalah pada titik yang sama. Meskipun berbeda secara bentuk geometri namun fungsi dari poligon tetaplah sama yaitu untuk menentukan nilai dari titik-titik koordinat yang ada pada poligon dengan cara melakukan pengukuran azimut, sudut antar titik dan juga jarak antar titik poligon.
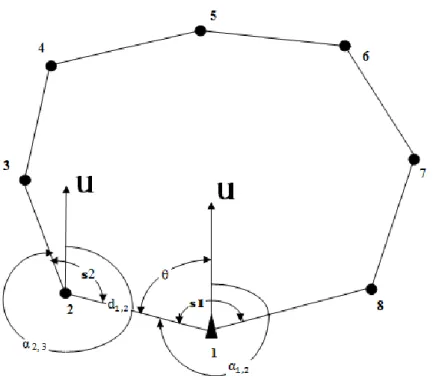
Keterangan Gambar I.2
u : arah utara poligon tertutup 1,2,3... : titik-titik pada poligon tertutup
: tanda titik referensi : tanda titik poligon : sudut bantu perhitungan s1, s2 : sudut ukuran ke-1 dan ke-2
d1,2 : jarak sisi dari titik 1 ke titik 2
α1,2, α2,3 : azimut sisi dari titik 1 ke-2 dan azimuth sisi dari titik 2 ke-3
Dalam gambar (I.2) ditunjukkan contoh poligon tertutup. Titik 1 adalah titik yang dijadikan sebagai acuan (titik ikat) dengan α1, 2 adalah azimut dari poligon
tertutup. Karena unsur pengukuran dalam poligon adalah sudut dan arah maka harus ditentukan hubungan antara keduanya. Dengan menggunakan koordinat dari titik yang diketahui nilainya yaitu titik 1, maka didapat persamaan penentuan koordinat secara umum yaitu:
X2 = X1+ d1,2α1,2 ... (I.1) Y2 = Y1 + d1,2α1,2 ... (I.2) Dari persamaan (I.1) di atas untuk mencari azimut berikutnya dari masing-masing titik koordinat digunakan cara penambahan hasil azimut awal ditambah dengan sudut antar titik koordinat. Azimut dari masing-masing titik ini ditentukan atas dasar sketsa pengukuran yang telah dibuat di lapangan pada saat dilakukan pengukuran, agar hasil perhitungan koordinat yang dihasilkan sesuai dengan posisi koordinat sebenarnya di lapangan. Pada gambar (I.2) digunakan azimuth awal adalah α1,2 sehingga azimut α2, 3 dicari dengan persamaan sebagai berikut.
= 360o – α1,2 α 2, 1 = 180o – 360o + α1,2 = α 1, 2 – 180o α 2, 3 = α 2, 1 + (360o – s2) = α 1, 2 – 180o + 360o – s2 = α 1, 2 + 180o – s2 ... (I.3)
Dengan cara yang sama ditentukan azimut dari titik-titik berikutnya, sehingga untuk menentukan azimut yang benar maka hasil pengukuran sudut dari masing-masing titik juga harus benar atau dengan kata lain hasil ukurannya harus terkoreksi. Kesalahan dalam pengukuran sudut di dalam perhitungan koordinat dengan menggunakan metode bowdith, dilakukan sesuai dengan persamaan berikut ini:
Σβ = (n – 2) . 180o
, jika menggunakan sudut dalam ... (I.4) Σβ = (n + 2) . 180o
, jika menggunakan sudut luar ... (I.5) Komponen dari sebuah poligon adalah sudut, azimut dan juga pengukuran jarak. Jika data ukuran dalam poligon adalah sudut dan jarak maka pasti koreksi harus dilakukan terhadap kesalahan yang ada pada pengukuran keduanya. Karena telah dikoreksi pengukuran sudut maka perlu juga dilakukan koreksi terhadap pengukuran jarak caranya adalah dengan mengurangkan atau menambahkan selisih jumlah hitungan absis (d sin α) dan ordinat (d cos α) yang seharusnya bernilai 0, persamaannya adalah sebagai berikut.
Σ d sin α = 0 ... (I.6) Σ d cos α = 0 ... (I.7) Dengan demikian dari komponen sudut dan jarak dapat ditentukan tingkat ketelitian dari pengukuran suatu poligon. Pada poligon yang tertutup atau terikat sempurna dimana jumlah sudut hasil pengukuran serta jumlah d sin α dan d cos α sudah tertentu maka tingkat ketelitian poligon didasarkan pada besarnya kesalahan penutup sudut dan jarak. Dengan dasar tersebut kelas poligon dibedakan menjadi (Basuki, 2006).
Tabel I.1. Kelas ketelitian Poligon
Kelas ketelitian poligon I II III IV
Kesalahan penutup sudut 2” N 10” N 30” N 60” N
Koreksi maksimum persudut 1” 2” 3” 6”
Ketelitian penutup jarak 1 : 35000 1 : 10000 1 : 5000 1 : 2000
Keterangan Tabel I.1
N : banyaknya titik dalam poligon.
Metode Bowdith dalam penentuan nilai koordinat posisi horisontal terkadang diperlukan, sebab nilai koordinat yang dihitung dengan menggunakan metode
Bowdith digunakan sebagai nilai koordinat pendekatan yang nantinya digunakan pada proses perhitungan dengan metode hitung kuadrat terkecil.
I.8.2. Survei deformasi
Secara umum deformasi didefinisikan sebagai perubahan bentuk, posisi dan dimensi dari suatu materi, atau sebagai perubahan kedudukan (pergerakan) suatu materi pada suatu benda baik secara absolut maupun relatif dalam suatu kerangka referensi tertentu, akibat suatu gaya yang bekerja pada materi tersebut (Kuang, 1996). Pada survei deformasi digunakan dua jenis keranga dasar untuk proses pemantauannya (Chen, 1986), yaitu:
1. Kerangka dasar absolut, yaitu suatu kerangka dasar titik-titik referensi yang terletak di luar area obyek pengamatan deformasi yang posisinya dianggap stabil,
2. Kerangka dasar relatif, yaitu suatu kerangka dasar dengan titik-titik obyek pengamatan terletak di dalam area pengamatan deformasi. Pada kerangka dasar relatif, karena posisi titik-titik obyek yang digunakan terletak di dalam area pengamatan yang tidak stabil, maka titik-titik obyek tersebut mengalami perubahan.
Kerangka dasar pada pekerjaan survei deformasi digunakan untuk menentukan besarnya nilai pergeseran dan parameter-parameter pergeseran, yang mempunyai karakteristik dalam ruang dan waktu (Chrzanowsky dkk., 1986). Pengolahan data dari pemantauan masing-masing epok tersebut diratakan dengan hitung kuadrat terkecil secara terpisah maupun secara langsung. Berdasarkan hasil pengukuran berulang tersebut, akan diperoleh perbedaan koordinat titik-titik objek, sehingga parameter-parameter deformasi dapat ditentukan.
Prosedur survei deformasi dalam pengamatan dua epok dilakukan dengan cara (Widjajanti, 1997):
1. menyelenggarakan jaring pemantauan deformasi dan menentukan metode pengukuran yang tepat,
2. menganalisis data pengukuran dan melakukan hitung perataan,
3. mengenali pergeseran benda kaku yang terjadi atau sebagian benda saja, dan
4. membentuk model deformasi yang sesuai.
I.8.3. Hitung perataan kuadrat terkecil metode parameter
Metode perataan standar II atau hitung kuadrat terkecil metode parameter adalah metode hitungan estimasi parameter yang menyatakan hubungan fungsional antara besaran pengukuran dan besaran parameter. Menurut Wolf (1997) prinsip hitungan perataan dengan kuadrat terkecil adalah jumlah kuadrat dari koreksi yang diberikan pada hasil ukuran adalah minimum dengan besaran pengamatan pada persamaan tersebut merupakan fungsi dari persamaan parameter. Model matematis yang menunjukkan pengamatan adalah fungsi dari parameter ditunjukkan sebagai berikut (Wolf, 1997):
La = f(Xa) ... (I.8) F(Xa) = f(Xo+X) ... (I.9) La = Lb + V ... (I.10) Lb + V = f(Xo + X) ... (I.11)
Untuk model matematika yang tidak linier dapat dilinierisasikan menggunakan deret Taylor sebagai berikut:
Lb + V = f(Xo + X) Lb + V= f(Xo) + ∂F ∂Xa
|
xa=x + ∂2F ∂Xa2 +... ∂nF ∂Xan Lb + V = f(Xo) + AX V = AX + f(Xo) – Lb ... (I.12) V = AX + F ... (I.13) Xa = Xo + X ... (I.14)Dalam hal ini,
La : nilai estimasi pengamatan Xa : nilai estimasi parameter Lb : nilai pengamatan
F : selisih nilai fungsi estimasi pengamatan dengan nilai pengamatan
V : residu / koreksi pengamatan Xo : nilai pendekatan parameter
X : nilai koreksi parameter
Dari persamaan di atas nilai X atau nilai koreksi parameter dapat dihitung dengan memasukkan komponen matriks bobot (P) dalam perhitungan sesuai dengan persamaan berikut ini:
X = - (AT PA)-1 (AT PF) ... (I.15) Sehingga nilai estimasi parameter (Xa) adalah:
Xa = Xo + X ... (I.16)
1.8.3.1. Mencari nilai parameter dan nilai ukuran terkoreksi apabila diketahui bobot ukuran. Dari persamaan (I.15) nilai X koreksi parameter harus ditentukan untuk mencari nilai estimasi parameter (Xa). Dalam teori hitung kuadrat terkecil metode parameter, harga X dapat ditentukan berdasarkan data hasil perhitungan dari data pengukuran yaitu mencari nilai parameter dan nilai ukuran terkoreksi. Terkadang ketelitian pengukuran yang digunakan pada hitung kuadrat terkecil tidak sama, sehingga untuk hasil estimasi yang lebih realistis pada proses hitungan diberikan bobot sesuai dengan ketelitian saat pengukuran.
Penentuan bobot ukuran dapat dinyatakan dengan persamaan (Mikhail, 1981).
𝑃 =𝜎02
𝜎𝑙2 ... (I.17)
Dalam hal ini,
𝜎02 = varian apriori 𝜎𝑙2 = varian pengukuran
Apabila antar data ukuran tidak berkorelasi maka matriks P adalah matriks diagonal dengan element entri pada diagonal utamanya adalah:
P = σ02 . ΣLb−1 ... (I.18) Apabila varian apriori 𝜎02 telah ditentukan nilainya yaitu 1, matriks P dapat ditulis: P = 1 σl12 0 0 0 1 σl22 0 0 0 1 σl32 ... (I.19)
Sesuai dengan teori kuadrat terkecil maka untuk mendapatkan nilai La terbaik jumlah kuadrat residu (V) harus minimum dan dalam bentuk matriks hasil perhitungannya akan sama dengan V transpose dikalikan dengan V, sehingga persamaannya menjadi (Hadiman, 2001):
VTPV = (AX + F)TP(AX + F) = (XTAT + FT)P(AX + F)
= XTATPAX + XTATPF + FTPAX + FTPF
= XTATPAX + 2FTPAX + FTPF ... (I.20) Dengan menggunakan diferensial parsial ke vektor X diperoleh:
∂VTPV ∂X = 0
2XTATPA + 2FTPAXTATPA + FTPA = 0
-(ATPA)-1(ATPF) = X ... (I.21) Berdasarkan nilai X yang dihitung dari persamaan di atas dapat ditentukan nilai estimasi pengamatan (La) dan juga beberapa persamaan yang nantinya akan digunakan dalam analisis jaringan.
La = L + V = L – A(ATPA)-1(ATPF) + F ... (I.22)
𝜎 𝑜2 = VTPV
n−u ... (I.23)
Σxx = 𝜎 𝑜2 (AT
PA)-1 ... (I.24) ∑VV = 𝜎 𝑜2 ( P-1 – A(ATPA)-1 AT) ... (I.25)
Dalam hal ini:
𝜎 𝑜2 = varian aposteori
Σxx = matriks varian kovarian parameter ∑VV = matriks varian kovarian residu
1.8.3.2. Kontrol hitungan. Pada proses hitung perataan yang melibatkan hitungan dengan persamaan tidak linier, kontrol hitungan menjadi suatu prosedur yang sangat penting untuk dilakukan. Hal ini dikarenakan pada proses hitungan dengan persamaan tidak linier dibutuhkan proses iterasi yang berulang-ulang agar diperoleh nilai estimasi parameter yang sesuai. Terkadang pada saat melakukan proses perhitungan, dari iterasi didapatkan hasil nilai koreksi parameter (X) dan juga harga residu (V) yang semakin membesar. Melihat hasil ini terkadang diasumsikan bahwa
data pengukuran yang diperoleh adalah data yang kurang bagus karena semakin besarnya nilai koreksi (V) yang secara otomatis harga dari varian aposteori (𝜎 𝑜2 ) juga
akan semakin menjadi besar, yang berakibat uji data pengukuran akan ditolak. Untuk itulah kontrol perhitungan menjadi proses yang penting untuk dilakukan apakah perhitungan yang dilakukan telah benar dan sesuai dengan hasil yang diinginkan.
Menurut Hadiman (2001), kontrol hitungan pada metode parameter dapat ditentukan dengan persamaan sebagai berikut:
VTPV= FTPV ... (I.26)
Bila terjadi perbedaan, karena pembulatan dalam proses hitungan, berarti secara keseluruhan ada kesalahan dalam proses hitungan.
Meskipun kontrol hitungan dapat ditentukan, namun prosedur ini hanyalah untuk mengontrol proses perhitungan yang dilakukan, bukan kontrol kebenaran penyelesaian yang juga tergantung dengan jumlah pengamatan dan parameter yang digunakan. Terkadang pada hitungan awal terjadi perbedaan selisih harga yang besar antara nilai VTPV dan FTPV. Untuk itu, agar perbedaan ini tidak terlalu besar atau mungkin selisih antara keduanya bernilai nol, maka caranya adalah dengan menggunakan harga pendekatan parameter yang diperkirakan nilainya sama dengan nilai parameter hasil estimasi perhitungan.
I.8.4. Linierisasi persamaan pengamatan
Persamaan yang membentuk hubungan antara pengukuran sudut maupun jarak dengan koordinat titik-titik estimasi merupakan persamaan non-linier. Untuk itu perlu dilakukan linierisasi menggunakan deret Taylor (Soeta’at, 1996). Secara umum proses linierisasi dengan menggunakan deret Taylor adalah melakukan diferential persamaan terhadap parameter yang ingin diketahui nilainya sampai suku pertama dan menganggap suku kedua hingga seterusnya (atau suku ke-n) mendekati nol.
I.8.4.1. Linierisasi persamaan pengamatan jarak. Fungsi data ukuran jarak terhadap parameter posisi 2D (x,y) merupakan persamaan yang tidak linier sehingga perlu dilakukan proses linierisasi menggunakan deret Taylor yang secara umum seperti dalam persamaan berikut.
F x = Lb + V = F(x0) + ∂F(x)
∂(x)x =x 0x + ... (I.27)
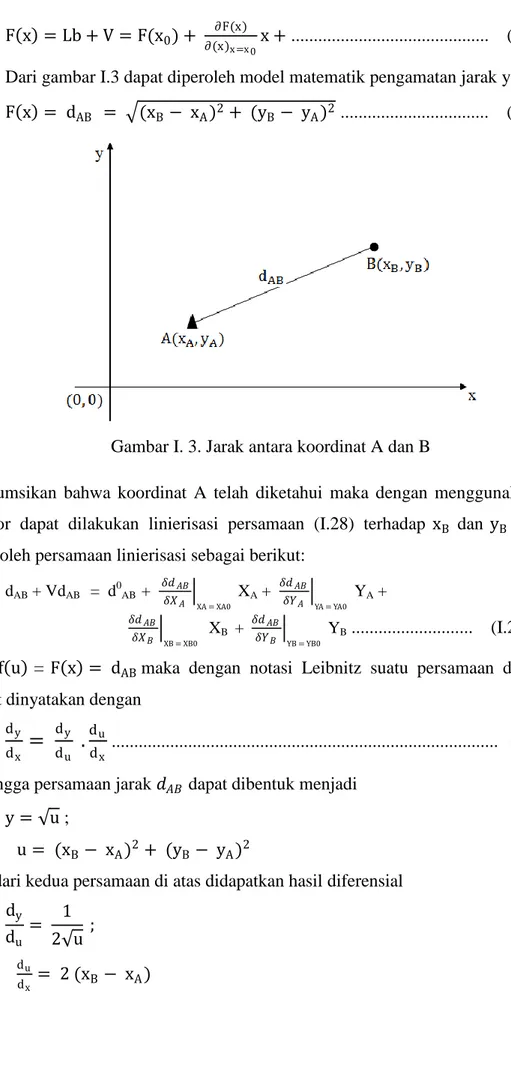
Dari gambar I.3 dapat diperoleh model matematik pengamatan jarak yaitu
F x = dAB = (xB− xA)2+ (yB− yA)2 ... (I.28)
Gambar I. 3. Jarak antara koordinat A dan B
Diasumsikan bahwa koordinat A telah diketahui maka dengan menggunakan deret Taylor dapat dilakukan linierisasi persamaan (I.28) terhadap xB dan yB sehingga diperoleh persamaan linierisasi sebagai berikut:
dAB + VdAB = d0AB + 𝛿𝑑𝐴𝐵 𝛿𝑋𝐴 XA = XA0 XA + 𝛿𝑑𝐴𝐵 𝛿𝑌𝐴 YA = YA0 YA + 𝛿𝑑𝐴𝐵 𝛿𝑋𝐵 XB = XB0 XB + 𝛿𝑑𝐴𝐵 𝛿𝑌𝐵 YB = YB0 YB ... (I.29)
Jika f u = F x = dABmaka dengan notasi Leibnitz suatu persamaan diferensial
dapat dinyatakan dengan dy dx
=
dy du.
du dx ... (I.30)Sehingga persamaan jarak 𝑑𝐴𝐵 dapat dibentuk menjadi
y = u ;
u = (xB− xA)2+ (y
B− yA)2
dan dari kedua persamaan di atas didapatkan hasil diferensial dy du = 1 2 u ; du dx = 2 (xB − xA)
dengan menggunakan aturan Leibneitz pada persamaan (I.30) didapatkan hasil diferensial terhadap koordinat xB, begitu juga dengan cara yang sama dilakukan
proses diferensial terhadap koordinat 𝑦𝐵 menghasilkan: F′ x =dy dx = xB− xA (xB− xA)2+ (yB− yA)2 ... (I.31) F′ x =dy dx = yB− yA (xB− xA)2+ (yB− yA)2 ... (I.32)
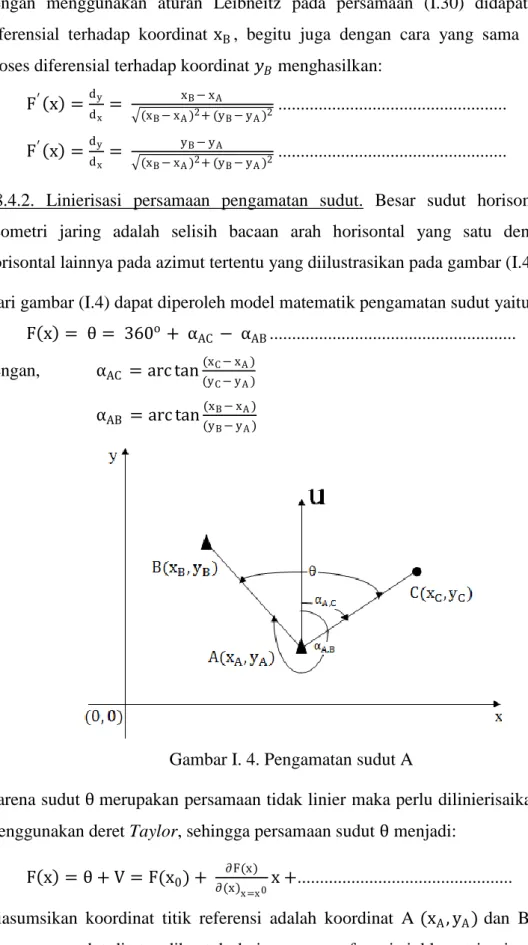
I.8.4.2. Linierisasi persamaan pengamatan sudut. Besar sudut horisontal suatu geometri jaring adalah selisih bacaan arah horisontal yang satu dengan arah horisontal lainnya pada azimut tertentu yang diilustrasikan pada gambar (I.4).
Dari gambar (I.4) dapat diperoleh model matematik pengamatan sudut yaitu F x = θ = 360o + α
AC − αAB... (I.33)
dengan, αAC = arc tan
(xC− xA)
(yC− yA)
αAB = arc tan(xB− xA)
(yB− yA)
Gambar I. 4. Pengamatan sudut A
Karena sudut θ merupakan persamaan tidak linier maka perlu dilinierisaikan dengan menggunakan deret Taylor, sehingga persamaan sudut θ menjadi:
F x = θ + V = F(x0) + ∂F(x)
∂(x)x =x 0x +... (I.34)
Diasumsikan koordinat titik referensi adalah koordinat A (xA, yA) dan B (xB, yB).
(inverse) fungsi dari trigonometri. Karena dalam kasus ini diferensial hanya pada titik koordinat C (xc, yc) maka dengan menggunakan aturan Leibneitz pada
persamaan (I.30) didapatkan dua persamaan yaitu: f u = arc tan u ;
u = (xC− yC)
(xA− yA)
karena f u merupakan fungsi sinklometri maka diperlukan suatu metode khusus dalam proses diferensial f u terhadap u , sehingga dalam perhitungan ini juga diperlukan hasil diferensial dari fungsi trigonometri tangent sebagai berikut:
du df(u) =
∂ tan f(u)
∂f(u) = sec
2f(u)
ingat bahwa dalam persamaan trigonometri sec2f u − tan2f u = 1 , maka
didapatkan
sec u = 1 + x2
dengan menggunakan fungsi invers didapat df u du = 1 du df u = 1 1 + x2
Hasil akhir dari proses ini didapat dengan menggunakan aturan Leibneitz pada persamaan (I.30), dengan proses diferensial terhadap koordinat xB, begitu juga dengan cara yang sama yang dilakukan terhadap koordinat yB menghasilkan:
F′ x =dy dx = yC− yA (xC− xA)2+ (yC− yA)2 ... (I.35) F′ x =dy dx = −(xC− xA) (xC− xA)2+ (yC− yA)2 ... (I.36)
I.8.5. Uji statisitik hasil hitungan perataan
Untuk mengetahui bahwa hasil pengamatan di lapangan tidak mengandung kesalahan tak acak maka nilai varian dan koreksi ukuran hasil pengamatan dilakukan pengujian secara statistik untuk daerah kepercayaan tertentu. Pengujian statistik yang dilakukan berupa data snooping untuk mengetahui atau mendeteksi adanya kesalahan blunder.
Kesalahan suatu pengamatan dalam konsep hitung kuadrat terkecil, diasumsikan mengikuti sebaran normal. Kebenaran asumsi ini perlu diuji dengan
menggunakan uji statistik. Salah satu uji statistik untuk mendeteksi adanya kesalahan kasar (gross error) dapat dilakukan dengan uji Tau. Uji ini merupakan hasil pengembangan data snooping untuk mencari data pengamatan yang dihinggapi kesalahan kasar. Uji Tau diterapkan untuk menghindari kesalahan estimasi nilai varian apriori (σo2) yang menyebabkan kurang terwakilinya kondisi pengukuran di
lapangan sebenarnya (Kuang, 1996). Pada pendeteksian ini setiap data diuji dengan tujuan menemukan data pengamatan yang mengandung kesalahan besar. Oleh karena itu perlu dicari penyebab penolakan Hipotesis nol (Ho), sehingga perlu disusun lagi
Ho dan hipotesis alternatif atau tandingan (Ha) sebagai berikut :
Ho : hasil pengamatan tidak dipengaruhi kesalahan kasar
Ha : hasil pengamatan dipengaruhi kesalahan kasar
Tahapan pengujiannya adalah sebagai berikut. 1. Menyusun hipotesis :
Hipotesa nol (Ho, merupakan perumusan sementara yang akan diuji
kebenarannya) yang berarti pengamatan ke li tidak dipengaruhi kesalahan
kasar.
Hipotesa tandingan (Ha, sebagai lawan dari hipotesa nol) yang berarti
pengamatan ke li dipengaruhi kesalahan kasar.
2. Menetapkan taraf uji (αo).
3. Menentukan nilai 𝑡𝛼𝑜 /2 dari tabel fungsi distribusi t-student dengan
argument αo dan r (derajat kebebasan).
4. Menentukan nilai batas tαo/2 yang dapat dihitung dari hubungan dengan distribusi t-student dengan rumus (Kuang, 1996) :
ταo/2( r ) =
r tα o/2 r−1
r−1+ tα o/2 r−1 ... (I.37)
5. Menghitung nilai τi untuk setiap data pengamatan
τi = Vi/ σvi ... (I.38)
dalam hal ini :
σvi : simpangan baku koreksi pengamatan ke-i (akar dari
elemen diagonal matriks ∑vv )
6. Menguji hipotesis nol (Ho)
Hipotesis nol diterima jika : | τi | < ταo/2 ... (I.39)
Penerimaan Ho bermakna bahwa ukuran li tidak dipengaruhi kesalahan kasar,
ini artinya data ukuran tersebut tidak perlu dihilangkan atau diulang. Hal yang sebaliknya berlaku untuk penolakan Ho yang bermakna bahwa ukuran li dipengaruhi
kesalahan kasar, sehingga perlu dilakukan cek data ukuran atau pengukuran dengan kesalahan kasar tersebut tidak disertakan dalam proses hitungan.
I.8.6. Elips kesalahan
Hasil perhitungan dari data pengukuran sudut, azimut dan jarak menghasilkan nilai koordinat dari suatu titik. Dengan menggunakan metode hitung kuadrat terkecil dapat ditentukan koordinat titik stasiun dan juga varian kovarian parameter, sehingga setiap titik hasil estimasi pasti berpasangan dengan ketelitiannya atau standar deviasinya. Namun, dengan hanya mengetahui simpangan bakunya belum dapat ditentukan kualitas dari posisi yang dihasilkan, sebab posisi x dan y bukanlah posisi yang dihitung secara terpisah tetapi penentuan kesalahan melibatkan distribusi kesalahan gabungan dari x dan y. Dari permasalahan ini untuk menunjukkan hubungan kesalahan dua variabel dan sekaligus untuk menunjukkan kualitas titik stasiun hasil perhitungan diperlukan suatu tampilan secara visual maupun nilai numeris dengan cara membentuk elips kesalahan pada setiap titik koordinat hasil estimasi.
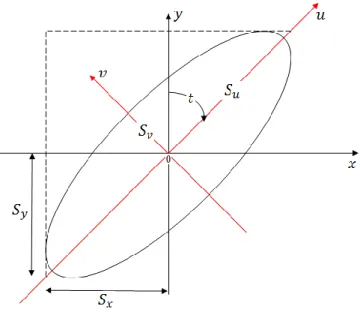
Gambar (I.5) menjelaskan tentang visualisasi dari elips kesalahan. Arah orientasi dari elips kesalahan bergantung dari sudut t, yang merupakan sudut yang dibentuk dari sumbu y searah jarum jam dengan sumbu kedua u dan sumbu v yang saling tegak lurus membentuk sudut 90o. Sudut t diperlukan untuk mencari besarnya sumbu maksimum u dan sumbu minimum v. Sumbu u memperlihatkan kesalahan maksimum dari hasil estimasi begitu juga sebaliknya, sumbu v memperlihatkan kesalahan minimum dari perhitungan koordinat hasil estimasi. Dari gambar (I.5) diperlihatkan hubungan antara sumbu kartesi (x, y) dan (u, v).
Gambar I. 5. Elips kesalahan (Ghilani, 2005)
Untuk mendapatkan koordinat kartesi dari u dan v, dari gambar di atas dapat ditarik hubungan matematis:
Sui = Sxisin t + Syicos t ... (I.40) Svi = −Sxicos t + Syisin t ... (I.41) Dalam bentuk matriks dapat ditulis
Sui Svi = Sin t Cos t −Cos t Sin t Sxi Syi ... (I.42) dalam bentuk yang sederhana adalah
Z = R . X ... (I.43) dengan:
ui = sumbu maksimum elips vi = sumbu minimum elips
t = sudut rotasi elips terhadap sumbu kartesi 2D R = matriks rotasi
Untuk permasalahan hitung perataan pada sistem koordinat (x,y), dapat dihasilkan matriks kofaktor 𝑄𝑥𝑥. Matriks ini kemudian dikembangkan ke dalam sistem koordinat (u, v) sesuai dengan persamaan (Ghilani, 2005):
Penjabaran matriks 𝑄𝑧𝑧 adalah
Qzz = qquu quv
vu qvv ... (I.45)
Dimana entri kofaktor 𝑄𝑥𝑥 adalah varian dan kovarian dari nilai koordinat.
Qxx = qqxx qxy
yx qyy ... (I.46)
Jika persamaan (I.46) dimasukkan dalam persamaan (I.44) didapatkan:
Qzz =
qxx sin
2t + q
xycos t sin t
+ qxycos t sin t + qyy cos2t
− qxxcos t sin t − qxy cos2t + qxy sin2t + qyycos t sin t − qxx cos t sin t − qxy cos2t
+ qxy sin2t + qyycos t sin t
qxx cos2t − qxycos t sin t
− qxycos t sin t + qyy sin2t
... (I.47)
Sesuai dengan persamaan di atas maka dapat ditulis:
quu = qxx sin2t + 2qxycos t sin t + qyy cos2t ... (I.48) qvv = qxx cos2t − 2qxycos t sin t + qyy sin2t ... (I.49) Untuk membuat nilai sudut t berharga maksimal terhadap quu maka lakukan diferential quu terhadap sudut t dan aturlah hasil akhir dari persamaan quu dengan nilai 0.
𝑑𝑞𝑢𝑢 𝑑𝑡 = −
𝑞𝑦𝑦 − 𝑞𝑥𝑥
2 2 sin 2𝑡 + 2𝑞𝑥𝑦cos 2𝑡 = 0 sehingga didapat hasil diferensial𝑞𝑢𝑢 terhadap 𝑡 yaitu:
sin 2𝑡
cos 2𝑡 = tan 2𝑡 = 2𝑞𝑥𝑦
𝑞𝑦𝑦− 𝑞𝑥𝑥 ... (I.50)
Dalam kasus analisis jaring sangatlah diperlukan perbandingan elips kesalahan dari setiap titik yang ada pada jaring. Hal ini diperlukan agar dapat diketahui kualitas dari masing–masing jaring menggunakan uji statistik dengan tingkat kepercayaan tertentu. Menggunakan uji statistik Fisher hubungan antara elips kesalahan dengan kualitas jaring dapat ditentukan, persamaannya adalah (Ghilani, 2005).
𝑆𝑢% = 𝑆𝑢𝑐 = 𝑆𝑢 2𝐹𝛼 ,2,𝑑𝑒𝑟𝑎𝑗𝑎𝑑 𝑘𝑒𝑏𝑒𝑏𝑎𝑠𝑎𝑛 ... (I.51)
𝑆𝑣%= 𝑆𝑣𝑐 = 𝑆𝑣 2𝐹𝛼 ,2,𝑑𝑒𝑟𝑎𝑗𝑎𝑑 𝑘𝑒𝑏𝑒𝑏𝑎𝑠𝑎𝑛 ... (I.52)
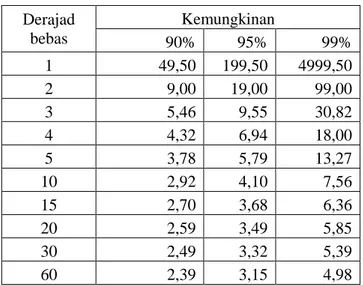
Dari persamaan di atas dapat ditarik hubungan jika jumlah derajad kebebasan meningkat maka presisi akan meningkat dan ukuran dari kesalahan elips akan mengecil. Harga F ditentukan dari tingkat kepercayaan yang digunakan sesuai dengan tabel I.2 (Ghilani, 2005).
Tabel I.2. Tabel statistik nilai kemungkinan Derajad bebas Kemungkinan 90% 95% 99% 1 49,50 199,50 4999,50 2 9,00 19,00 99,00 3 5,46 9,55 30,82 4 4,32 6,94 18,00 5 3,78 5,79 13,27 10 2,92 4,10 7,56 15 2,70 3,68 6,36 20 2,59 3,49 5,85 30 2,49 3,32 5,39 60 2,39 3,15 4,98
Disamping menyediakan informasi kepresesian dalam bentuk angka, keuntungan lain dari elips kesalahan adalah menampilkan informasi secara visual kepresesian antara dua koordinat (Ghilani, 2005), sebab dengan menggunakan informasi secara numeris maupun grafis, dapat ditentukan kualitas dari suatu jaring titik kontrol. Dalam pekerjaan survei pengukuran, bentuk, ukuran, dan sudut orientasi dari elips kesalahan bergantung dari ketelitian dan jumlah titik kontrol yang digunakan, kepresesian pengukuran dan bentuk geometri jaring dari survey. Dalam desain jaring ketiga hal ini sangat diperlukan untuk mendapatkan hasil perhitungan posisi yang handal.
Dalam proses analisis tingkat kepresesian dari titik-titik pantau, selain menggunakan analisis secara visual digunakan juga klasifikasi jaring titik kontrol horisontal sesuai dengan Standar Nasional Indonesia (SNI). Kelas suatu jaring titik kontrol horizontal ditentukan berdasarkan panjang sumbu-panjang (semi-major axis) dari setiap elipss kesalahan relatif (antar titik) dengan tingkat kepercayaan (confidence level) 95% yang dihitung berdasarkan statistik yang diberikan oleh hasil hitung perataan jaringan kuadrat terkecil terkendala minimal (minimal constrained). Dalam hal ini panjang maksimum dari sumbu panjang elipss kesalahan relatif yang digunakan untuk menentukan kelas jaringan adalah :
keterangan:
r = panjang maksimum dari sumbu-panjang yang diperbolehkan, dalam milimeter
c = faktor empirik yang menggambarkan tingkat presisi survei;
d = jarak antar titik, dalam kilometer.
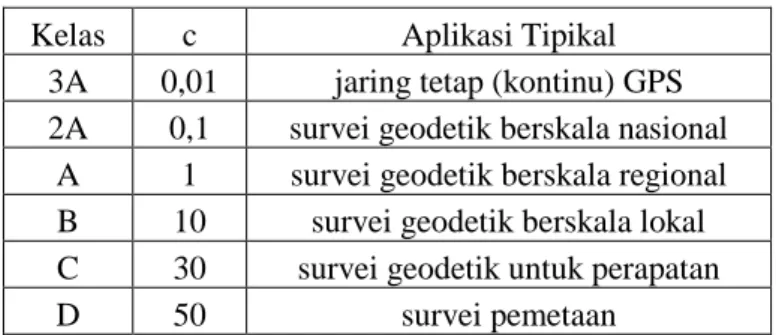
Berdasarkan nilai faktor c tersebut, kategorisasi kelas jaring titik kontrol horizontal yang diusulkan diberikan pada Tabel I.3 (SNI JKH, 2002) .
Tabel I.3. Kelas (pengukuran) jaring titik kontrol horisontal
Kelas c Aplikasi Tipikal
3A 0,01 jaring tetap (kontinu) GPS 2A 0,1 survei geodetik berskala nasional
A 1 survei geodetik berskala regional B 10 survei geodetik berskala lokal C 30 survei geodetik untuk perapatan
D 50 survei pemetaan
I.8.7. Analisis deformasi horisontal
Untuk menentukan parameter pergeseran dan menganalisis ada tidaknya pergeseran pada titik-titik pantau, dilakukan hitungan analisis pergeseran. Data yang digunakan dalam hitung analisis pergeseran horisontal adalah data yang dihasilkan dari tahap hitung perataan terpisah masing-masing kala pengamatan. Uji pergeseran titik dilakukan dengan menggunakan analog uji kesalahan besar metode Pope Tau. Adapun langkah – langkah analisisnya adalah sebagai berikut:
1. Menentukan vektor pergeseran titik yang merupakan selisih dari titik-titik pantau yang sama namun pada kala pengamatan yang berbeda.
2. Untuk melakukan uji statistik dari vektor pergeseran maka digunakan uji kesebangunan dengan persamaannya adalah sebagai berikut:
𝛿𝑑12 = 𝑑𝑥122 + 𝑑𝑦
122 ... (I.54)
Dimana:
𝛿𝑑12 = pergeseran titik dari kala pengamatan i sampai j 𝑑𝑥12 = nilai vektor pergeseran searah sumbu x
𝑑𝑦12 = nilai vektor pergeseran searah sumbu y
3. Hipotesa nol (Ho) yang digunakan pada uji statistik ini adalah bahwa titik tidak bergeser dalam selang dari kala pengamatan ke-1 ke kala pengamatan ke-2, sehingga:
Ho = jika titik ke-i tidak mengalami pergeseran. Ha = jika titik ke-i mengalami pergeseran.
4. Nilai statistik (T) pada uji pergeseran ini didapat dengan memenuhi persamaan (Simona, 2006):
𝑇 = 𝛿𝑑𝑖𝑗
𝜎(𝛿𝑑𝑖𝑗) ... (I.55)
dimana:
𝜎(𝛿𝑑𝑖𝑗) = simpangan baku dari vektor pergeseran titik.
5. Nilai statistik (T) sesuai dengan tabel distribusi Student (τ) dimana selang dari hipotesa nol (Ho) ditolak jika:
𝑇 > 𝜏𝑑𝑓 ,𝛼/2 ... (I.56) Apabila hipotesis diterima (Ho), menunjukkan bahwa titik ke-i tidak mengalami pergeseran dan sebaliknya, apabila hipotesis ditolak maka titik-titik tersebut mengalami pergeseran.
1.9. Hipotesis
Perbedaan ketelitian alat, jumlah titik referensi dan perubahan bentuk geometri jaring pada masing-masing desain jaring pemantau akan menentukan sudut orientasi dan dimensi dari elips kesalahan, dengan kata lain akan menentukan kualitas dari desain jaring pemantau. Dengan menggunakan referensi penelitian sebelumnya, dapat ditentukan bahwa pada interval waktu satu tahun tidak ada pergeseran horisontal yang terjadi pada titik-titik pemantau jaring deformasi horisontal candi Borobudur, namun pergeseran mungkin dapat terjadi apabila ada faktor lain yang menyebabkannya (misalnya bencana alam).