PEMODELAN FUNGSI TERPADU YANG DITERAPKAN PADA
MULTI-GRIPPER FINGERS DENGAN METODE
VACUUM-SUCTION
W. WidhiadaJurusan Teknik Mesin, Fakultas Teknik, Universitas Udayana Kampus Bukit Jimbaran Denpasar Bali
Hp.081338300256 e-mail: widhiwyn@yahoo.com
Abstrak
Artik el ini memapark an proses desain fungsional terintegrasi untuk desain vacuum suction dari multi-gripper fingers untuk pengambilan non-rigid dan elemen-elemen yang ringan dari gas regulator. Untuk memfasilitasi desain terpadu multi -gripper fingers, penulis menggunak an Matlab / Simulink , SimMechanics, Pneumatic Simscape dan pak et perangk at lunak Solidworks. Multi-closed loop dengan k ontrol PID yang diterapk an untuk mengontrol gerakan dan tek anan isap dari ujung jari. Gripper multifungsi jari ini dik embangk an untuk mengambil berbagai k omponen rek ayasa. Untuk mendapatk an p endek atan perencanaan gerak an yang optimal menggunak an referensi vacuum pressure, gerak an dan integrasi perencanaan k ontrol ak tuator pada setiap sendi sistem gripper jari. Analisis hasil simulasi menunjuk k an tek anan isap yang optimum. Sudut lintasan setiap link jari bergerak untuk mencapai target sudut lintasan. Analisis simulasi juga menghadirk an gaya k ontak antara jari dan permuk aan objek
Kata Kunci: vacuum suction, multi-gripper fingers, k omponen gas regulator, Kontrol PID
1. Latar Belakang
Sejak tiga dasawarsa yang lalu, penggunaan robot gripper telah berkembang pesat yang digunakan untuk pemegangan berbagai macam tugas di dunia industri. Akan tetapi secara tradisional kebanyakan robot gripper yang dirancang khusus hanya digunakan untuk pengambilan benda-benda tertentu saja seperti robot gripper digunakan untuk mengambil benda dengan permukaan bulat atau persegi panjang saja.
Menurut Andrew dkk pada tahun 2001 [1] mengatakan perancangan robot gripper adalah cukup sulit karena memerlukan banyak pertimbangan seperti memerlukan persyaratan untuk dapat digunakan pada tugas-tugas tertentu saja, persyaratan geometri dari gripper yang dirancang dan kompleksnya sistem mekanisme. Menurut Zlajpah pada tahun 2010 [2], secara tradisional physical prototype memerlukan pengetesan kemampuan tangan secara benar dengan biaya yang cukup mahal dimana akan memerlukan proses pembuatan desain secara berulang-ulang. Oleh karena itu teknik simulasi diperlukan untuk mengurangi biaya pemodelan protype karena teknik simulasi dapat mengidentifikasi sebagai peralatan yang sangat penting dalam merancang produk-produk yang baru. Simulasi telah dikenal sebagai sebuah alat powerful untuk mendukung perancangan, perencanaan dan analisa performance dinamik dari robot gripper.
Paket perangkat lunak komputer adalah alat yang ampuh untuk merancang sistem fisik dalam pemodelan solid 3D dalam lingkungan virtual. CAD sangat berguna untuk merancang multi-derajat kebebasan (DOF) jari gripper. Namun, penulis membutuhkan beberapa software untuk merancang dan mengontrol kinerja kinematika dan dinamika gripper untuk pengambilan komponen-komponen gas regulator bertekanan rendah. Studi penelitian ini membahas integrasi dua paket perangkat lunak, Solidworks dan Matlab/ Simulink/Simscape. Dalam karya ini hasil simulasi dan visualisasi dinamika gripper robot disajikan.
Sebuah komentar kelompok menemukan kesulitan menggenggam ketika jari mengambil komponen elastis, karena komponen ini berubah bentuk. Oleh karena itu,
dalam penelitian ini penulis menerapkan konsep perekat menggenggam melalui fasilitas hisap di setiap jari. Dalam tulisan ini, penulis berkonsentrasi pada pemodelan virtual dari vacuum suction yang dipasang pada setiap jari gripper yang digunakan untuk mengambil komponen-komponen yang ringan dari gas regulator bertekanan rendah.
2. Tinjauan Pustaka
Biagiotti memaparkan konsep dasar untuk prostetik manusia yang merupakan tingkat anthropormorphism dan tingkat ketangkasan tangan serta pengendalian[3]. Anthropomorphism berhubungan dengan kemampuan prosthesis untuk meniru gerakan tangan manusia baik secara penuh maupun sebagian, dengan mempertimbangkan beberapa aspek seperti bentuk, ukuran, ketetapan dan yang lain termasuk warna, temperatur. Ketangkasan tangan berhubungan dengan dengan fungsi prosthesis. Secara umum, ketangkasan berarti kemampuan the end-efektor yang dioperasikan oleh sistem robot yang cocok untuk melakukan tugas dengan tingkat kerumitan tertentu. Sebuah kajian mendalam karya ilmiah yang dilakukan sejauh ini tentang ketangkasan robot tangan dapat ditemukan oleh Bicci dkk [4]. Ketangkasan atribut prosthetic tangan dapat dibagi dalam dua performance utama yaitu menggenggam dan manipulasi internal. Menggenggam adalah kemampuan memegang benda di dalam the end-efektor dibawah konfigurasi tangan yang diberikan. Manipulasi internal adalah pengendalian gerakan dari objek yang digenggam dalam ruang kerja tangan, dengan tangan membatasi objek dengan sebuah variabel konfigurasi selama manipulasi [5].
Pengendalian adalah jawaban yang cendrung menuju perancangan prosthesis yang lebih mudah untuk dikontrol oleh pemakai [6]. Pengendalian dapat dipertimbangkan dari beberapa sudut pandang seperti dari sudut pandang pasien dan sudut pandang kontroller .
Ada beberapa contoh tangan palsu yang berorientasi pada pengembalian fungsi penggenggaman seperti Hand Vasi [7] dan Utah hand [8]. Pembukaan dan penutupan prostetik tangan digerakkan oleh satu derajat kebebasan. Fakta ini memiliki keterbatasan untuk pengembangan tugas-tugas yang diperlukan ketangkasan.
Selanjutnya, jenis lain dari tangan prostetik berkembang untuk memberikan ketangkasan yang lebih tinggi dengan menggunakan prinsip anthropomorphical dan meningkatkan fungsi genggaman. Kinerja yang lebih baik dari tangan palsu yang dicapai dengan meningkatkan jumlah derajat kebebasan dan memberikan sinyal umpan balik seperti posisi, kecepatan dan kekuatan menggenggam. Ada beberapa tangan prostesis yang relevan seperti: Marcus hand [9], RTR I [10], dan RTR II [11].
Sebuah pembelajaran berbasis pendekatan pada klasifikasi objek untuk robot perakitan telah disediakan dengan menggabungkan data gambar, model menggenggam dan tugas perakitan [12]. Perancangan gripper yang dibuat dari karakteristik objek untuk klasifikasi objek dan untuk analisis menggenggam fitur dan perilaku. Berdasarkan perancangan gripper dan tugas-tugas perakitan, lokasi perakitan dan analisis pendekatan arah gripper dan operasi perakitan akan dilakukan oleh tangan robot dengan benar.
Masalah simulasi dan pemodelan robot menjadi tantangan dalam waktu yang lama bagi para peneliti. Pendekatan untuk desain arsitektur gripper secara sembarang telah dibahas untuk mensimulasikan robot untuk mengambil objek yang fleksibel [13]. Integrasi perangkat lunak simulasi objek fleksibel telah dievaluasi.
Gripper Multi-fungsional diperlukan untuk mengambil benda-benda tertentu dalam sebuah tugas perakitan produk. Banyak makalah diperkenalkan di masa lalu untuk meniru gerakan fleksibilitas tangan dengan menggunakan gripper robot, tetapi jelas persyaratan penting untuk keperluan industri masih kurang diperhatikan, seperti ketahanan dan biaya [14].
Sebuah konstruksi baru gripper telah disajikan untuk menyelidiki bagaimana pendekatan antara perakitan manual dan perakitan otomatis [15]. Makalah ini telah menyajikan konsep gripper untuk melakukan tugas perakitan tradisional secara manual dalam lingkungan.
2.1.Perencanaan lintasan untuk Robot Gripper
Tangan robot industri harus memiliki fleksibilitas yang tinggi untuk melaksanakan operasi teknologi yang kompleks. Dibandingkan dengan gerakan manusia, gripper robot memiliki banyak masalah untuk mencapai gerakan sederhana di ruang kerja. Untuk berpindah di antara dua titik ruang, tugas yang berbeda harus diselesaikan oleh robot gripper. Perencanaan lintasan untuk link jari adalah salah satu masalah mendasar dalam desain robot gripper. Garis lintasan terbaik harus ditemukan dengan efisiensi tinggi dan produktivitas kerja harus dicapai. Di sisi lain, kedua tabrakan dan kendala harus dihindari. Umumnya gerakan perencanaan sebelumnya digunakan untuk mengontrol gerak robot. Jalur perencanaan untuk mengontrol gerakan link jari dari titik ke titik.
Gustavo menyajikan gripper tiga jari dengan memahami tugas objek dengan menggunakan jaringan syaraf berbasis kritik adaptif dengan mengendalikan jari-jari tangan dengan mengikuti lintasan [16]. Oleh karena itu, kesulitan menggenggam objek dapat ditetapkan sebagai control kontak objek dan manipulasi.
Brahim memfokuskan pada otomatisasi manipulasi dan perakitan komponen mikro menggunakan kontrol umpan balik [17]. Perencanaan lintasan digunakan untuk meningkatkan tingkat keberhasilan penanganan objek dan untuk menghindari kemacetan selama manipulasi mikro-bagian.
Atef menyajikan kombinasi algoritma genetika dengan metode optimasi klasik lainnya untuk membuktikan kinerja yang lebih baik sebagai teknik optimasi hibrida [18]. Analisis dan eksplorasi teknik optimasi yang digunakan untuk menemukan lintasan terbaik baik di ruang bersama. Pendekatan kinematika memberikan hasil yang sesuai, namun pada kenyataannya inersia tensor dan kendala torsi sulit untuk melaksanakan.
Ada beberapa metode yang menarik untuk perencanaan lintasan untuk membuktikan kinerja yang lebih baik. Namun, aplikasi ini kontrol perencanaan lintasan masih sulit untuk mengatasi gerakan kompleks untuk pemegangan objek. Dalam penelitian ini, penulis menyajikan pendekatan perencanaan lintasan yang optimal menggunakan referensi gerakan dan integrasi perencanaan pengendalian untuk sistem gripper jari. Kesalahan kecil, gerakan halus dan konsumsi energi minimum digunakan sebagai kriteria untuk kontrol perencanaan lintasan. Penulis mengusulkan penggunaan kurva pulsa untuk menghasilkan lintasan.
Gripper jari-jari mulai menutup jari di sepanjang pendefinisian lintasan ujung jari atau sudut sendi. Setelah mendeteksi kontak awal dengan objek, jari gripper drive aktuator pada sendi jari akan meningkatkan kekuatannya menggenggam.
Jari gripper dirancang untuk menyelesaikan beberapa tugas sulit dengan menentukan gerakan yang diinginkan untuk mencapai tujuan sasaran. Penulis menyajikan penyelidikan menghitung lintasan sebagai fungsi dari posisi, kecepatan dan percepatan untuk setiap gabungan dari gripper jari. Namun pada paper ini penulis hanya menyajikan berapa besar tekanan vakum outlet, kecepatan motor fan, besar power motor dan aliran volumetriknya. Beberapa hasil simulasi diberikan untuk menunjukkan efektivitasnya. 2.2.Kecekatan Menggenggam Objects
Gripper robot telah berkembang dari desain sederhana untuk desain multi jari untuk menyediakan komponen rekayasa perakitan terampil. Robot gripper digunakan untuk pegangan dan mengangkat tugas objek.
Sintesis pegang disajikan algoritma sederhana dan efisien untuk menemukan gaya penutupan pegang yang terbaik pada poligon planar dengan tiga jari tangan robot [19]. Angkatan menggenggam penutupan pada setiap kombinasi layak dari tepi yang dibangun menggunakan komputasi geometri. Perbandingan melakukan gaya kontak antara dua jari dan tiga jari ditunjukkan untuk menemukan yang terbaik dari jenis jari akan digunakan untuk memahami objek poligon.
Gambar 2.1 Dua jari pegang dibandingkan tiga jari pegang [Young]
Gaya genggam dalam pesawat mungkin ada apabila empat kontak di mana tiga yang independen. Artinya, ketika dua kontak gesekan yang terletak tepat di pesawat, penutupan kekuatan bisa eksis tanpa kontak pihak. Gambar 2.1 (a) menunjukkan kekuatan penutupan pegang oleh dua titik kontak gesekan dengan kontak pihak sebagai kontak berlebihan. Meskipun dua titik kontak gesekan yang cukup untuk matematis memiliki penutupan kekuatan dalam pesawat, tidak mungkin pegang stabil karena kemungkinan kesalahan. Sebagai contoh, pertimbangkan sebuah kesalahan kecil dalam memposisikan jari seperti yang ditunjukkan pada Gambar 2.1 (b) di mana Fi dimaksudkan dan Fa adalah lokasi kontak kekuatan aktual. Ketika ini terjadi, objek akan mulai berputar dan dapat lolos dari genggaman. Tetapi jika pemahaman yang dibangun seperti terlihat pada Gambar 2.1 (c) itu jauh lebih aman daripada jangkauan Gambar 2.1 (b) sehubungan dengan kemungkinan kesalahan. Jelas ketika menggenggam dibangun pada semua kombinasi layak tepi, penulis menganggap hanya menggenggam mana ketiga kontak eksplisit berpartisipasi.
Menggenggam objek adalah cara utama untuk jari gripper untuk mengasosiasikan dengan benda-benda dalam lingkungannya. Ada dua metode utama yang digunakan untuk memahami objek khusus dalam tugas ini, yaitu kekuatan dan tekanan vakum. Metode gaya kontak yang diterapkan untuk menghitung gaya kontak untuk memahami tubuh relatif kaku, sedangkan metode tekanan vakum diterapkan untuk menentukan tekanan hisap untuk mengangkat objek yang ringan.
2.3. Persyaratan Gripper untuk Perakitan Gasa Regulator
The end-effector atau gripper adalah sub-sistem dari sebuah robot industri yang mempertahankan sejumlah potongan geometris kerja untuk waktu tertentu, misalnya mengamankan posisi dan orientasi dari benda kerja dalam kaitannya dengan sistem gripper koordinat [20].
Posisi dan orientasi dari objek juga parameter yang sangat penting di mana posisi suatu obyek sebelum operasi pemegangan, sudah menetapkan batas gaya induksi sebagai titik di mana gaya ini dapat diterapkan. Menggenggam dengan permukaan kontak tunggal disebut adhesive grasping dan ini adalah prinsip operasi klasik untuk Gripper hisap. Sebaliknya, bentuk dan gaya pencengkraman yang cocok adalah prinsip-prinsip dasar menggenggam dengan lebih dari satu permukaan kontak dan kombinasi bentuk dan gaya yang cocok sering digunakan. Seperti dijelaskan sebelumnya, tangan merupakan alat yang sangat penting dalam hal fleksibilitas genggaman. Sebelum fungsi gripper dapat didefinisikan maka karakteristik penanganan manual dan fisik dari elemen perakitan perlu dipahami dan ini ditunjukkan pada Tabel 2.1.
Table 2.1 Karakteristik material setiap komponen
3. Metode Penelitian
3.1. Kebutuhan Fungsional Gripper Jari
Secara alami pencengkraman tangan manusia, secara otomatis ujung jari kontak menyesuaikan dengan kekuatan material. Namun, tangan berjuang untuk mengambil benda dengan permukaannya yang relatif tipis, misalnya mengambil uang koin dari meja bukanlah tugas yang mudah. Penulis telah menentukan kekuatan genggaman dan tekanan saat jari gripper menggenggam objek. Dari studi observasi dari proses perakitan, sejumlah fungsi tiruan ditentukan. Data ini tercantum dalam Tabel 3.1
3.2. Sistem Vacuum Generator
Untuk mengambil elemen rigid dan non-rigid, penulis telah mengintegrasi sistem pneumatik vakum kecil yang dipasang di setiap ujung jari gripper. Model simulasi dari sistem pneumatic vakum menggunakan MATLAB/pneumatic Simscape software.
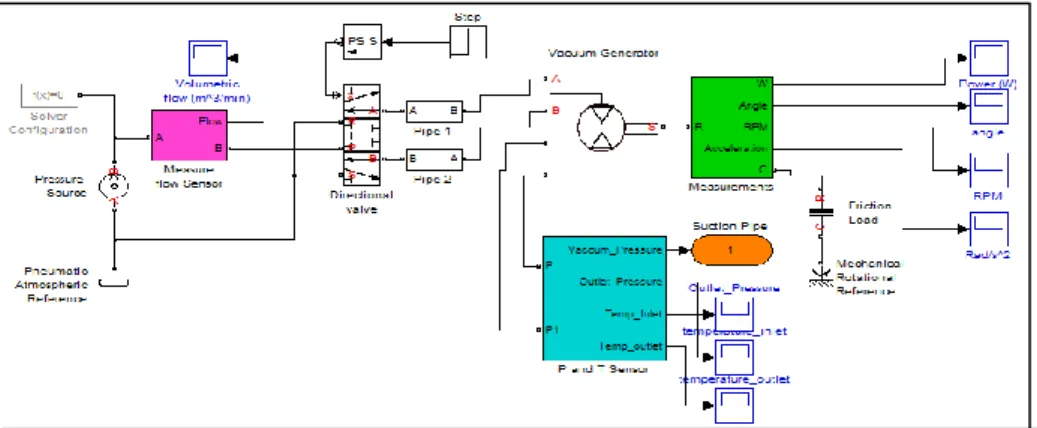
Diagram blok skematik dari sistem udara vakum ditunjukkan pada Gambar 3.1. Priciple dari gripper vakum adalah untuk menciptakan ruang hampa oleh generator vakum. Kemudian perbedaan tekanan menyebabkan terjadinya gaya yang digunakan untuk memegang benda yang ringan. Udara compresor bertindak sebagai sumber tekanan yang memberikan tekanan tinggi ke generator vakum. Rotasi converter blok pneumatik-mekanik menyediakan interface antara pneumatik dan domain rotasi mekanik. Tekanan dan suhu yang terdeteksi oleh tekanan virtual dan sensor suhu.
Gambar 3.1. The Schematic block diagram for Vacuum Generator System Model ini didasarkan pada asumsi sebagai berikut:
• Gas ideal.
• Panas spesifik pada tekanan konstan dan volume konstan, cp dan cv yang konstan. • Proses ini adiabatik, yaitu tidak ada transfer panas dengan lingkungan.
• Efek gravitasi dapat diabaikan.
Hukum gas ideal dianggap untuk menghitung perbedaan tekanan:
(3.1)
Where,
(3.2)
Dengan mengganti n dengan m/M, dan substitusi density (kg/m3)
(3.3)
(3.4)
Definisikan specific gas constant Rspecific as the ratio R/M,
(3.5)
(3.6)
dimana,
P adalah tekanan absolute, Pa V adalah volume gas, m3
adalah density gas, kg/m3
R adalah specific gas constant, 8.3145 J/mol K, and T adalah Absolute gas temperature, K
Sehingga gaya penghisapan dapat dihitung:
(3.7)
Dimana,
P adalah tekanan dalam N/m2
A adalah luas permukaan seal dalam m2 ( 4. Analisa dan Simulasi
4.1.Vakum hisap untuk menggenggam benda non rigid
Model hisap vakum banyak diterapkan contoh untuk mengambil permukaan yang relatif datar halus. Vakum udara diperoleh dari pneumatik vakum yang dihasilkan dari kompresi udara bertiup di ventura. Proporsional, integral, dan derivatif kontroler klasik (PID) juga diterapkan untuk mengendalikan gerakan ketika gripper jari menggenggam objek non rigid menggunakan vakum hisap.
Gambar 4.1. Vacuum suction non-rigid body on a planar surface
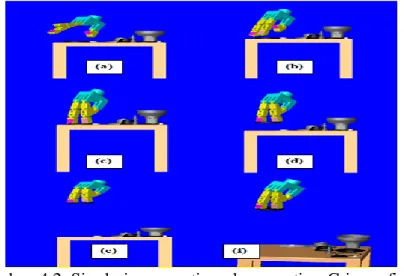
Gambar 4.2 mengilustrasikan gripper dalam empat tahap operasi untuk menyedot objek non-rigid. Pada Gambar 4.2 (a) dan (b) menunjukkan jari dalam konfigurasi awal untuk mengambil objek. Pada Gambar 4.2 (c) menunjukkan jari telah dipindahkan untuk menemukan posisi yang diinginkan untuk memilih objek. Akhirnya, dalam Gambar 4.2 (d) menunjukkan sistem vakum hisap yang disisipkan pada ujung jari mulai akhir untuk mengambil dan mengangkat objek non-padat. Perbedaan tekanan antara di dalam dan di luar ruang vakum menyebabkan menyerap kekuatan untuk memilih suatu objek.
Gambar 4.2. Simulasi pneumatic vakum suction Gripper finger
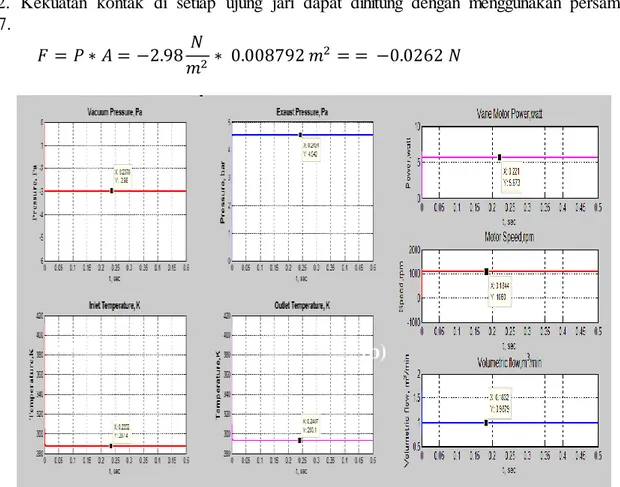
Analisis simulasi grafik untuk hisap menggenggam ditunjukkan pada Gambar 4.3. Ketika generator vakum diaktifkan, tekanan sedikit turun dari 0 sampai -2.98 Pa menghisap objek non-padat. Sistem motor baling-baling membutuhkan energi perkiraan 5,673 watt untuk melakukan tugas tersebut. Permukaan luas objek diukur pada 0.008792
m2. Kekuatan kontak di setiap ujung jari dapat dihitung dengan menggunakan persamaan 3.7.
Gambar 4.3. Pneumatic vakum hisap analisis 5. Kesimpulan
Analisis hasil simulasi menunjukkan tekanan vakum/hisap, temperature, power fan motor, kecepatan motor dan aliran volumetric yang optimum. Sehingga dapat ditentukan besar gaya kontak maksimum dari setiap masing-masing jari gripper. Dengan demikian jari-jari gripper dapat menggenggam benda dengan baik tanpa terjadi kerusakan pada benda yang dipegang. Sudut lintasan setiap link jari bergerak ke arah dengan cepat untuk mencapai target sudut lintasan. Sudut error/posisi jari gripper sendi digunakan untuk mengevaluasi kinerja gripper gerak jari. Hasil simulasi menunjukkan kesalahan sudut/posisi sinyal sangat kecil yang berada di bawah 0,1%. Ini adalah bukti bahwa algoritma dari loop multi-tertutup dengan kontrol PID dapat divalidasi untuk diterapkan dalam mekanisme kontrol robot
Daftar Pustaka
1. Andrew, t.miller (2001). A versatile simulator for grasp analysis, phd thesis, department of computer science columbia university, new york, ny 10027.
2. Zlajpah, l. (2010). Robot simulation for control design robot manipulators trends and development, isbn 978-953-307-073-5, slovenia.
3. Biagiotti. (2004). How far is the human hand?. A review on anthropomorphic robotic end-effectors, university of bologna, pp. 1-27.
4. Bicchi (2000). Hands for dexterous manipulation and robust grasping. IEEE transactions on robotics and automation, vol.16, no.6, pp.652-662.
5. Cutkosky, m.r. (1989). On grasp choice, grasp models, and the design of hands for manufacturing tasks, ieee transactions on robotics and automation, vol. 5, no. 3. pp. 269.
6. Abboudi, (1999). A biomimetic controller for a multifinger prosthesis. IEEE transactions on rehabilitation engineering, vol.7, no. 2, pp.121-129.
7. Vasi (1996). Small and light weight electric hands for children. Variety ability systems inc. toronto.
8. Jacobsen, s.c. (2001). Design of the utah/mit dextrous hand. Proc. ieee int. conf. robotics and automation, san francisco, ca, vol.3, pp. 1520–1532.
9. Kyberd, p.j. (1995). A two degree of freedom hand prosthesis with hierarchical grip control. IEEE trans. rehab. engineering, vol. 3, no. 1, pp 70-76.
10.Carrozza, m.c. (2004). Development of a self-adaptative prosthesis for restoring natural grasping. Autonomous robots, vol.16, no.2, pp.125-141.
11.Massa, b. (2001). Design and development of an underactuated prosthetic hand. IEEE international conference on robotic & automation, washington d.c, pp. 3374-3379.
12.Huaguo, l., cuiyun, j. and jianan, h. (1997). A knowledge based approach for object classification for robotic assembly. IEEE international conference on intelligent processing systems october 28 - 31, beijing, china, pp.1260-1262.
13.Rogalla, o. and dilmann,r (1999). A general approach for simulating robots for flexible material handling. Proceedings of the ieee international symposium on assembly and task planning, portugal, pp.211-218.
14.Lotti, f. and vassura,g. (2002). A novel approach to mechanical design of articulated fingers for robots hands. Proceedings of the ieee/rsj intl. conference on intelligent robots and systems, switzerland, pp.1687-1692.
15.Timothy, v., haraldstaab, breisch, s., soetebier,s., stahl, t., ankehackbarth and soenkekock. (2011). A flexible robotic gripper for automation of assembly tasks. Assembly and manufacturing (isam), ieee international Symposium, germany, pp.1-6. 16.Gustavo, g. and jagannathan, s. (2001). Adaptive critic-based neural network object
contact controller for a three-finger gripper. IEEE transaction on neural networks, vol.15, no.2, pp.395-407.
17.Brahim, t., nadine, p. l. and sounkalo, d. (2010). Robust trajectory tracking and visual servoing schemes for mems manipulation. IEEE/asme international conference on advanced intelligent mechatronics, aim'10, montreal canada, version 1. 18.Atef, a.a. (2007). Optimal trajectory planning of manipulators. Journal of
engineering science and technology, vol.2, no.1, pp.32-54.
19.Young. P and Gregory, P. (1990). Grasp Synthesis of Polygonal Objects. International Conference of IEEE on Robotics and Automation, pp.1574-1580.
20.Andreas, w, ralf, s. and henrik, s. (2005). Gripper in motion: the fascination of automated handling tasks. Springer-verlag berlin hedelberg, isbn.3-540-25657.
![Gambar 2.1 Dua jari pegang dibandingkan tiga jari pegang [Young]](https://thumb-ap.123doks.com/thumbv2/123dok/1956354.2677477/4.893.261.674.254.356/gambar-dua-jari-pegang-dibandingkan-tiga-pegang-young.webp)