PENGUJIAN DAN ANALISIS SISTEM
4.1.Pengujian Sistem Kendali Otomatis Antenna Parabola dengan simulasi penggunaan di berbagai kota
Sistem kendali otomatis antenna parabola dapat digunakan diberbagai wilayah indonesia karena sudah melakukan otomatisasi gerakan antenna menggunakan perhitungan sudut azimuth dan elevasi dari koordinat lokasi unit SNG dan koordinat satelit serta arah mata angin.
Simulasi dilakukan dengan menggunakan fitur input manual pada sistem kendali otomatis antenna parabola, dengan memasukkan koordinat lokasi dan koordinat satelit yang dituju maka dapat dianalisa hasil sudut azimuth dan elevasi yang diperoleh dari banyak lokasi percobaan, dan dari arah hadap unit SNG kearah manapun.
Percobaan menggunakan koordinat lokasi berbagai cabang biro PT MEDIA TELEVISI INDONESIA (MetroTV) yaitu
1. Biro Jakarta (Pilar Mas, Kedoya Selatan) dengan koordinat -6,18 LS/ 106,76 BT
2. Biro Bandung (Jalan Braga, Bandung) dengan koordinat -6,92 LS/ 107,61 BT 3. Biro Yogyakarta (Jalan Semaki, Yogyakarta) dengan koordinat -7,79 LS/
110,38 BT
4. Biro Surabaya (Jalan Ketampon Ruko Permata Bintaro, Surabaya) dengan koordinat -7,28 LS/ 112,74 BT
5. Biro Medan (Jalan Prof HM. Yamin, Medan) dengan koordinat -3,59 LS/ 98,69 BT
6. Biro Palembang (Komp. Zury Express, Palembang) dengan koordinat -2,96 LS/ 104,75 BT)
7. Biro Makassar (Jalan Haji Bau, Makassar) dengan koordinat -5,15 LS/ 119,41 BT
Dan dengan data satelit yang diuji diantaranya adalah,
1. Satelit Palapa (Indosat) pada koordinat 113 BT
2. Satelit Telkom 1 pada koordinat 108,2 BT
3. Satelit Telkom 2 pada koordinat 118,2 BT
4. Satelit Asiasat 3 pada koordinat 120 BT
5. Satelit Asiasat 5 pada koordinat 100,5 BT
Percobaan simulasi penggunaan di berbagai kota menghasilkan hasil keluaran sebagai berikut pada tabel 4.1 hingga 4.5, sebagai contoh perhitungan sampel menggunakan lokasi Jakarta pada koordinat -6,18° LS dan 106,75° BT, tujuan satelit Palapa D 113° BT, dengan sudut kompas 159,86° N, seperti ditunjukkan pada gambar 4.1,
Gambar 4.1 Sampel data pengujian sistem kendali otomatis antenna parabola Satelit Palapa D di Jakarta
dengan menggunakan persamaan 2.1 dan 2.2 maka dapat ditentukan sudut azimuth dan elevasi sebagai berikut,
- Posisi stasiun bumi -6,18° LS dan 106,75° BT dibandingkan posisi satelit 113° BT, stasiun bumi berada pada selatan dan barat dari satelit, sehingga A=A’
Nilai A’ dapat dicari dengan persamaan 2.1,
𝐴𝐴′=𝑡𝑡𝑡𝑡𝑡𝑡−1�tan|𝑙𝑙𝑙𝑙𝑡𝑡𝑙𝑙𝑙𝑙𝑙𝑙 − 𝑙𝑙𝑙𝑙𝑡𝑡𝑙𝑙𝑙𝑙𝑡𝑡𝑡𝑡| sin(𝑙𝑙𝑡𝑡𝑡𝑡𝑙𝑙𝑙𝑙) � longSB = 106,75° BT longSat = 113° BT latSB = -6,18° LS 𝐴𝐴′ =𝑡𝑡𝑡𝑡𝑡𝑡−1�tan|𝑙𝑙𝑙𝑙𝑡𝑡𝑙𝑙𝑙𝑙𝑙𝑙 − 𝑙𝑙𝑙𝑙𝑡𝑡𝑙𝑙𝑙𝑙𝑡𝑡𝑡𝑡| sin |𝑙𝑙𝑡𝑡𝑡𝑡𝑙𝑙𝑙𝑙| �= 𝑡𝑡𝑡𝑡𝑡𝑡−1� tan|106,75°−113°| sin |−6,18°| � = 𝑡𝑡𝑡𝑡𝑡𝑡−1�0.109 0.107�= 45.53°
Didapatkan sudut azimuth A=A’= 45,53° N dan memasukkan faktor koreksi sudut kompas 159,86° N karena keterbatasan gerak motor servo, sehingga dengan menggunakan persyaratan “Stasiun bumi berada pada arah mata angin selisih kurang dari 180° sudut azimuth” pada bab III dan persamaan 3.7 maka sudut azimuth motor servo adalah,
𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑡𝑡𝑝𝑝𝑝𝑝𝑝𝑝𝑙𝑙𝑝𝑝𝑝𝑝𝑡𝑡𝑝𝑝𝑡𝑡𝑡𝑡𝑠𝑠𝑝𝑝𝑝𝑝𝑠𝑠𝑙𝑙𝑡𝑡𝑎𝑎𝑎𝑎𝑎𝑎𝑠𝑠𝑡𝑡ℎ= 𝑡𝑡𝑝𝑝𝑡𝑡ℎ𝑎𝑎𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑙𝑙𝑎𝑎𝑡𝑡 − 𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑡𝑡𝑡𝑡𝑎𝑎𝑎𝑎𝑎𝑎𝑠𝑠𝑡𝑡ℎ+ 180° = 159,86°−45,53° = 114,33° Nilai sudut elevasi dapat ditentukan melalui persamaan 2.2
𝐸𝐸 =𝑡𝑡𝑡𝑡𝑡𝑡−1�cos|𝑙𝑙𝑡𝑡𝑡𝑡𝑙𝑙𝑙𝑙| . cos|𝐿𝐿|−0,151 �1−(cos|𝑙𝑙𝑡𝑡𝑡𝑡𝑙𝑙𝑙𝑙| . cos |𝐿𝐿|)2� =𝑡𝑡𝑡𝑡𝑡𝑡−1�cos|−6,18| . cos|0,109|−0,151 �1−(cos|−6,18| . cos |0,109|)2� =𝑡𝑡𝑡𝑡𝑡𝑡−1�0,994∗0,999−0,151 �1−(0,994∗0,999)2�=𝑡𝑡𝑡𝑡𝑡𝑡−1� 0,842 √0,014� =𝑡𝑡𝑡𝑡𝑡𝑡−1�0,842 0,118�=𝑡𝑡𝑡𝑡𝑡𝑡−1(7,135) = 82,02°
Didapatkan nilai Elevasi adalah 82,02° terdapat selisih 3° perhitungan teori dengan hasil perhitungan program.
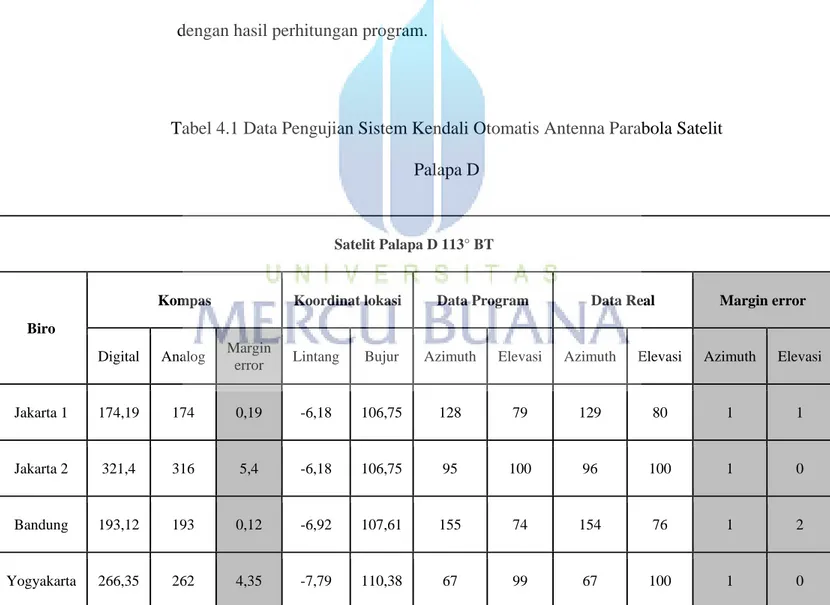
Tabel 4.1 Data Pengujian Sistem Kendali Otomatis Antenna Parabola Satelit Palapa D
Satelit Palapa D 113° BT
Biro
Kompas Koordinat lokasi Data Program Data Real Margin error
Digital Analog Margin
error Lintang Bujur Azimuth Elevasi Azimuth Elevasi Azimuth Elevasi
Jakarta 1 174,19 174 0,19 -6,18 106,75 128 79 129 80 1 1
Jakarta 2 321,4 316 5,4 -6,18 106,75 95 100 96 100 1 0
Bandung 193,12 193 0,12 -6,92 107,61 155 74 154 76 1 2
Surabaya 248,79 249 0,21 -7,28 112,74 66 98 68 98 2 0
Medan 228,43 229 0,57 -3,59 98,69 152 72 152 73 0 1
Palembang 190,67 193 2,33 -2,96 104,75 120 74 120 75 0 1
Makassar 164,13 157 7,13 -5,15 119,41 35 99 40 99 5 0
Rata- rata error margin kompas 2,54 Rata- rata error margin azimuth dan elevasi 1,375 0,625
Tabel 4.2 Data Pengujian Sistem Kendali Otomatis Antenna Parabola Satelit Telkom 1
Satelit Telkom 1 108,2° BT
Biro
Kompas Koordinat lokasi Data Program Data Real Margin error
Digital Analog Margin
error Lintang Bujur Azimuth Elevasi Azimuth Elevasi Azimuth Elevasi
Jakarta 1 174,87 173 1,87 -6,18 106,75 161 82 160 82 1 0 Jakarta 2 321,24 316 5,24 -6,18 106,75 128 97 127 95 1 2 Bandung 192,17 192 0,17 -6,92 107,61 7 98 9 98 2 0 Yogyakarta 266,23 262 4,23 -7,79 110,38 101 99 101 100 0 1 Surabaya 249,87 248 1,87 -7,28 112,74 101 100 102 101 1 1 Medan 227,71 228 0,29 -3,59 98,69 158 78 157 76 1 2
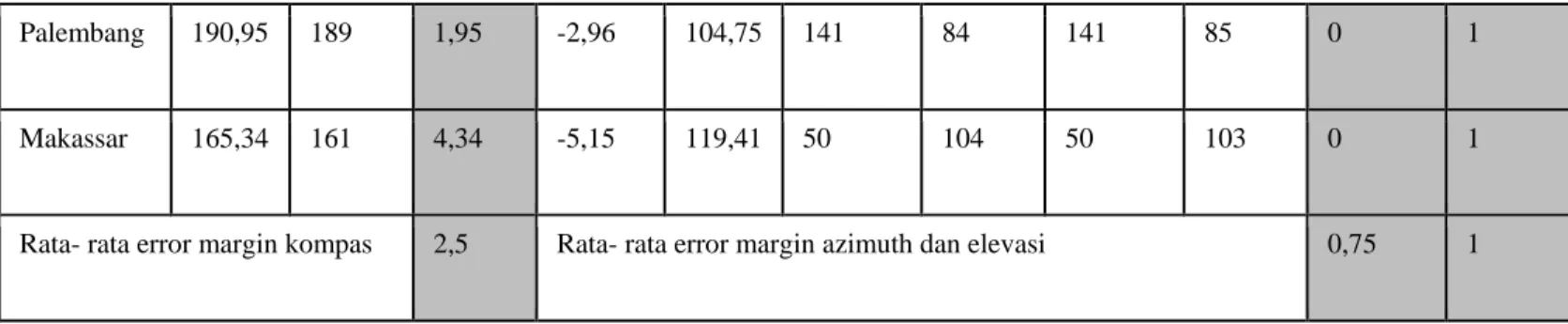
Palembang 190,95 189 1,95 -2,96 104,75 141 84 141 85 0 1
Makassar 165,34 161 4,34 -5,15 119,41 50 104 50 103 0 1
Rata- rata error margin kompas 2,5 Rata- rata error margin azimuth dan elevasi 0,75 1
Tabel 4.3 Data Pengujian Sistem Kendali Otomatis Antenna Parabola Satelit Telkom 2
Satelit Telkom 2 118,2° BT
Biro
Kompas Koordinat lokasi Data Program Data Real Margin error
Digital Analog Margin
error Lintang Bujur Azimuth Elevasi Azimuth Elevasi Azimuth Elevasi
Jakarta 1 175,15 174 1,15 -6,18 106,75 113 74 113 74 0 0 Jakarta 2 322,40 317 5,40 -6,18 106,75 80 105 80 105 0 0 Bandung 193,05 194 0,95 -6,92 107,61 135 75 134 75 1 0 Yogyakarta 267,34 261 6,34 -7,79 110,38 41 102 43 100 2 2 Surabaya 249,20 249 0,20 -7,28 112,74 32 100 35 100 3 0 Medan 227,34 228 0,66 -3,59 98,69 147 66 147 68 0 2 Palembang 191,11 189 2,11 -2,96 104,75 113 73 113 73 0 0 Makassar 164,57 161 3,57 -5,15 119,41 177 83 176 84 1 1
Rata- rata error margin kompas 1,15 Rata- rata error margin azimuth dan elevasi 0,88 0,63
Tabel 4.4 Data Pengujian Sistem Kendali Otomatis Antenna Parabola Satelit Asiasat 3
Satelit Asiasat 3 120° BT
Biro
Kompas Koordinat lokasi Data Program Data Real Margin error
Digital Analog Margin
error Lintang Bujur Azimuth Elevasi Azimuth Elevasi Azimuth Elevasi
Jakarta 1 175,51 175 0,51 -6,18 106,75 113 74 113 74 0 0 Jakarta 2 321,22 317 4,22 -6,18 106,75 75 107 76 108 1 1 Bandung 192,48 193 0,52 -6,92 107,61 131 73 133 73 2 0 Yogyakarta 266,16 261 5,16 -7,79 110,38 34 104 35 102 1 2 Surabaya 249,85 248 1,85 -7,28 112,74 24 102 25 104 1 2 Medan 227,79 227 0,79 -3,59 98,69 147 66 147 68 0 2 Palembang 191,24 191 0,24 -2,96 104,75 111 71 111 71 0 0 Makassar 164,13 160 4,13 -5,15 119,41 157 83 157 85 0 2
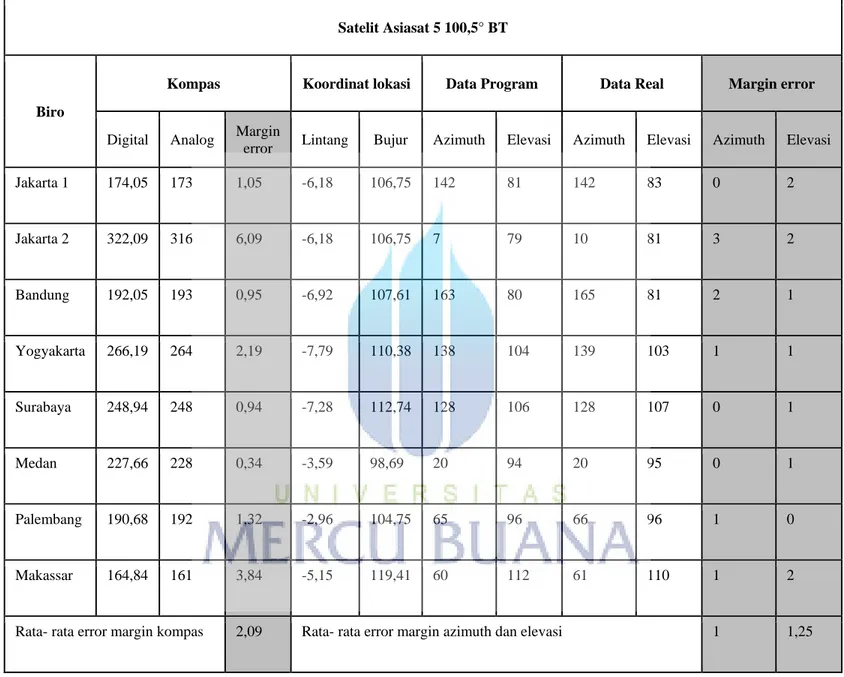
Tabel 4.5 Data Pengujian Sistem Kendali Otomatis Antenna Parabola Satelit Asiasat 5
Satelit Asiasat 5 100,5° BT
Biro
Kompas Koordinat lokasi Data Program Data Real Margin error
Digital Analog Margin
error Lintang Bujur Azimuth Elevasi Azimuth Elevasi Azimuth Elevasi
Jakarta 1 174,05 173 1,05 -6,18 106,75 142 81 142 83 0 2 Jakarta 2 322,09 316 6,09 -6,18 106,75 7 79 10 81 3 2 Bandung 192,05 193 0,95 -6,92 107,61 163 80 165 81 2 1 Yogyakarta 266,19 264 2,19 -7,79 110,38 138 104 139 103 1 1 Surabaya 248,94 248 0,94 -7,28 112,74 128 106 128 107 0 1 Medan 227,66 228 0,34 -3,59 98,69 20 94 20 95 0 1 Palembang 190,68 192 1,32 -2,96 104,75 65 96 66 96 1 0 Makassar 164,84 161 3,84 -5,15 119,41 60 112 61 110 1 2
4.2.Pengujian Akurasi Pergerakan Motor Antenna Parabola
Sistem kendali otomatis antenna parabola memiliki fitur gerakan manual antenna parabola setelah nilai sudut azimuth dan nilai sudut elevasi ditemukan secara otomatis, antenna akan bergerak. Antenna sudah mengarah ke sudut yang tepat kearah satelit yang dituju, namun demikian, kuat sinyal yang dikirim atau diterima masih dapat ditingkatkan atau diperbaiki dengan melakukan fine tuning
antenna parabola, yaitu dengan menggerakan secara halus antenna parabola per satuan 1°. Pengujian ini berfungsi untuk menentukan akurasi gerak antenna parabola sesuai dengan program. Tabel 4.6 menunjukkan hasil data pengujian
fine tuning gerak servo perbandingan sudut motor servo dari program otomatis dengan sudut motor servo pengukuran.
Tabel 4.6 Perbandingan data keluaran motor servo otomatis dengan manual
Skala Azimuth Otomatis Elevasi Otomatis Azimuth Manual Elevasi Manual
0° 0° 0° -85° 0° 5° 0° 4° -80° 5° 10° 8° 10° -75° 10° 15° 14° 15° -70° 15° 20° 18° 20° -65° 20° 25° 25° 25° -60° 25° 30° 30° 30° -55° 30° 35° 35° 35° -50° 35° 40° 40° 40° -45° 40° 45° 45° 46° -40° 45° 50° 49° 50° -35° 50°
55° 55° 55° -30° 55° 60° 60° 60° -25° 60° 65° 65° 65° -20° 65° 70° 69° 70° -15° 70° 75° 75° 75° -10° 75° 80° 80° 80° -5° 80° 85° 85° 85° 0° 85° 90° 90° 90° 5° 95° 94° 95° 10° 100° 100° 100° 15° 105° 105° 105° 20° 110° 110° 110° 25° 115° 115° 115° 30° 120° 119° 120° 35° 125° 124° 125° 40° 130° 130° 130° 45° 135° 134° 135° 50° 140° 140° 140° 55° 145° 145° 145° 60° 150° 150° 150° 65° 155° 155° 155° 70° 160° 160° 160° 75° 165° 164° 165° 80° 170° 169° 170° 85° 175° 175° 175° 180° 178° 180°
4.3.Analisis Sistem
Pengujian sistem kendali otomatis antenna parabola pada bagian 4.1, margin error kompas berpengaruh pada gerak servo azimuth, sehingga dengan menambahkan margin error kompas dan margin error azimuth dapat disimpulkan toleransi pergerakan servo azimuth adalah sekitar +- 3 derajat, sedangkan servo elevasi dengan margin error rata- rata +- 1 derajat. Hal ini dikarenakan beban kerja motor yang lebih berat pada motor servo azimuth dibandingkan motor servo elevasi. Dengan demikian untuk implementasi pada unit van SNG, motor penggerak azimuth harus lebih kuat menahan beban minimal tiga kali lipat daripada kekuatan motor penggerak elevasi dikarenakan beban yang ditanggung masing- masing motor.
Pada pengujian bagian 4.2, pergerakan motor azimuth terlambat pada gerakan awal rentang 0° hingga 25° hal ini dikarenakan motor terbebani beban yang cukup berat dapat diketahui dari bunyi motor yang tetap berbunyi meskipun antenna sudah berhenti bergerak, bunyi tersebut dapat hilang, jika motor dibantu bergerak secara manual dari luar. Sehingga motor servo azimuth dapat disimpulkan memiliki rentang pergerakan selisih +-10°. Berbeda dari motor servo Elevasi, dikarenakan konstruksi motor dan penampang antenna sehingga beban yang diterima motor lebih ringan, sehingga sudut yang didapatkan lebih presisi, dan dapat disimpulkan rentang gerakan berkisar selisih dibawah 5° dapat terkoreksi dengan akurat. Motor manual pada unit SNG, memiliki batasan sudut gerak azimuth dan elevasi dari -85° hingga +85° sehingga sistem kendali perlu disesuaikan dengan model gerak unit SNG.