PENGEMBANGAN SISTEM KOGNITIF MANDIRI
UNTUK MENGATASI KETERBATASAN KOGNITIF PADA MANUSIA
KASUS : WAHANA GERAK MANDIRI SEBAGAI
PERANGKAT BANTU TUNA NETRA
Kusprasapta Mutijarsa
1, [email protected]
Adang Suwandi Ahmad
1, [email protected]
Ferry Rippun Gideon
2, [email protected]
1
Sekolah Teknik Elektro dan Informatika, Institut Teknologi Bandung
2
Fakultas Teknik, Universitas Katolik Indonesia Atma Jaya Jakarta
ABSTRAK
Makalah ini membahas hasil penelitian yang mengembangkan sistem kognitif mandiri untuk mengatasi keterbatasan kognitif pada manusia. Dalam kasus ini adalah manusia yang mengalami keterbatasan kognitif pada penglihatan (tuna netra).
Telah banyak perangkat bantu tuna netra yang terdapat di pasaran, mulai dari perangkat mekanik yang paling sederhana, yaitu tongkat putih, anjing penuntun, hingga perangkat berteknologi tinggi berbasis sinyal akustik dan komputer. Semua perangkat yang ada memiliki beberapa kekurangan, terutama dalam hal kenyamanan penggunanya.
Pada penelitian ini, perangkat bantu tuna netra dikembangkan lagi menggunakan pendekatan lain, yaitu dengan konsep sistem kognitif. Sistem kognitif adalah sistem yang memiliki kemampuan kognitif, yang berarti sistem tersebut memiliki karakteristik “knowing”, “learning”, “understanding” dan “acting”. Dengan menerapkan sistem kognitif pada perangkat bantu tuna netra, diharapkan interaksi antara manusia yang memiliki keterbatasan kognitif dengan lingkungannya dapat terjadi secara manusiawi dan nyaman.
Sistem kogntif perangkat bantu tuna netra ini dibangun menggunakan teknologi wahana gerak mandiri. Wahana gerak mandiri adalah suatu wahana gerak yang memiliki kemampuan navigasi secara mandiri. Wahana gerak mandiri mampu untuk meraba dan membuat model lingkungan menggunakan sensor-sensor yang dimilikinya, dapat mengingat situasi lingkungan yang teraba dan dapat berfikir sendiri untuk merencanakan aksi dalam menghadapi berbagai situasi pada lingkungannya.
Sistem kognitif yang dibuat berbentuk perangkat beroda yang memiliki tongkat untuk menuntun tuna netra. Tuna netra pengguna perangkat ini cukup menekan keypad kecil yang terpasang pada tongkat untuk menentukan tujuan pergerakan, selanjutnya sistem kognitif akan menuntun tuna netra secara mandiri menuju tempat tujuan tersebut. Sistem ini dilengkapi dengan delapan pasang sensor ultrasonik untuk meraba lingkungannya, dua buah mikrokontroler dan satu buah PC sebagai pengendali, sepasang roda di bagian kiri dan kanan yang digerakkan oleh motor DC. Sistem navigasinya dilengkapi dengan kemampuan untuk membuat peta lingkungannya, melakukan estimasi posisi untuk menentukan posisi perangkat saat ini berada, membuat perencanaan jalur dari posisi saat ini menuju posisi tujuan yang diinginkan/ditentukan, serta melakukan penghindaran tabrakan terhadap benda yang berada di jalur pergerakannya.
1. LATAR BELAKANG
Manusia adalah makhluk yang dilahirkan paling sempurna. Manusia memiliki kemampuan kognitif untuk memproses informasi yang diperoleh dari lingkungan di sekelilingnya melalui indera yang dimilikinya, membuat persepsi terhadap apa-apa yang dilihat atau dirabanya, serta berfikir untuk memutuskan aksi apa yang hendak dilakukan untuk mengatasi keadaan yang dihadapinya.
Hal-hal yang dapat mempengaruhi kemampuan kognitif pada manusia meliputi tingkat intelejensia, kondisi fisik, serta kecepatan sistem pemrosesan informasi pada manusia. Bila kecepatan sistem pemrosesan informasi terganggu, maka akan berpengaruh pada reaksi manusia dalam mengatasi berbagai kondisi yang dihadapi.
Keterbatasan kognitif terjadi apabila terdapat masalah atau gangguan pada kemampuan kognitif. Masalah yang dialami bisa terjadi sejak lahir, atau terjadi perubahan pada tubuh manusia seperti terluka, terserang penyakit, mengalami kecelakaan yang dapat menyebabkan kerusakan salah satu indera, fisik atau juga mental[5].
Akibat dari adanya keterbatasan kognitif ini, manusia menjadi tidak mampu untuk memproses informasi dengan sempurna. Dengan ketidaksempurnaan ini maka manusia yang memiliki keterbatasan kognitif mengalami masalah dalam meraba, mempelajari atau berfikir untuk bereaksi terhadap keadaan yang dihadapinya.
Tuna netra adalah manusia yang mengalami keterbatasan pada indera penglihatan. Keterbatasan ini ada yang bersifat total atau parsial. Kondisi buta secara total terjadi bila penglihatan sudah tidak mengenal rangsangan sinar, sehingga untuk melakukan aktivitas dan mobilitas, manusia tersebut memerlukan alat bantu non-visual. Keterbatasan penglihatan yang bersifat buta sebagian adalah kondisi seseorang yang masih dapat melakukan kegiatan yang bersifat mobilitas namun penglihatan sudah tidak berfungsi dengan sempurna, sehingga memerlukan perangkat bantu tambahan seperti lensa bantu yang kuat.
2
.
PERANGKAT BANTU TUNA NETRAPerangkat tuna netra yang paling banyak digunakan adalah tongkat penuntun yang disebut tongkat putih. Tongkat putih adalah perangkat mekanik yang digunakan untuk mendeteksi benda yang terletak di
atas tanah, mendeteksi permukaan yang tidak rata, lubang, tangga, genangan air dan hal-hal yang beresiko lainnya. Harga tongkat putih tidak mahal, ringan, berukuran kecil dan dapat dilipat untuk diselipkan dalam kantong atau tas. Masalah utama dengan tongkat putih adalah pengguna harus dilatih cara menggunakannya selama lebih dari 100 jam [7], suatu biaya tersembunyi yang cukup besar. Selain itu, perangkat ini mengharuskan pengguna untuk secara aktif meraba daerah di depannya, tidak dapat mendeteksi rintangan di luar jangkauannya. Masalah lain pada tongkat putih adalah rintangan hanya dapat dideteksi dengan sentuhan. Hal ini dapat menyebabkan ketidaknyamanan, seperti ketika berjalan di jalan yang padat manusia.
Selain tongkat putih, tuna netra juga dapat dibantu anjing penuntun. Anjing penuntun adalah pembantu yang sangat baik bagi tuna netra. Tetapi anjing penuntun memerlukan latihan yang lama dan menyeluruh. Anjing penuntun yang sangat terlatih berharga sangat mahal sementara masa pemakaian efektif hanya sekitar lima tahun [7]. Selain itu, banyak tuna netra yang berusia lanjut, yang mengalami kesulitan untuk merawat anjing tersebut. Dengan berkembangnya teknologi radar dan ultrasonik, saat ini sudah cukup banyak perangkat berteknologi tinggi dijual di pasaran. Perangkat bantu berbasis elektronik ini diberi nama electronic travel aids (ETA). Prinsip kerja ETA menyerupai sistem radar, dimana sinyal laser atau ultrasonik dipancarkan pada arah tertentu dan kemudian sinyal tersebut dipantulkan balik oleh benda yang menghalanginya. Suatu sensor digunakan untuk mendeteksi sinyal pantulan, mengukur jarak sensor ke benda, dan kemudian menyampaikan informasi yang diperoleh ke pengguna melalui sinyal audio atau sentuhan. Umumnya ETA dapat mendeteksi benda dengan jangkauan hingga lima meter dari pengguna, tetapi memerlukan pendeteksian lingkungan secara terus-menerus pada arah yang diinginkan. Beberapa jenis ETA yang cukup dikenal adalah Laser Cane, Mowat Sensor, Binaural Sonic Aid [6].
Laser Cane bekerja berbasis optikal menggunakan tiga dioda laser dan tiga dioda foto sebagai penerimanya. Laser Cane dapat mendeteksi benda hingga setinggi kepala manusia, dengan jarak antara pengguna dan benda yang berada di depannya berkisar antara 1,5 meter hingga 3,5 meter. Mowat Sensor adalah devais genggam lain berbasis ultrasonik yang memberikan informasi jarak ke benda yang terdeteksi menggunakan getaran. Frekuensi getaran proporsional terhadap jarak antara sensor dengan benda tersebut. Binaural Sonic Aid
(Sonicguide) adalah devais berbentuk seperti kacamata. Satu transmitter ultrasonik dipasang di antara kedua lensa kacamata, dua buah receiver dipasang masing-masing di lensa kanan dan kiri. Sinyal dari masing-masing penerima dipresentasikan terpisah pada telinga kanan dan kiri. Perbedaan kekuatan sinyal yang teraba menentukan arah sinyal yang terpantul dari benda atau rintangan yang ditemui.
Semua perangkat bantu di atas memiliki beberapa kekurangan [2], diantaranya :
1. Pengguna harus secara aktif memantau lingkungannya untuk mendeteksi adanya rintangan. Prosedur ini menghabiskan waktu dan memerlukan aktivitas konstan serta konsentrasi penuh dari penggunanya.
2. Pengguna harus melakukan pengukuran tambahan terhadap benda yang terdeteksi untuk menentukan dimensi benda tersebut. Pengguna harus merencanakan jalur mengelilingi benda yang menghalanginya tersebut. Hal ini juga menghabiskan waktu dan memerlukan konsentrasi penuh, sehingga mengurangi kecepatan berjalan.
3. Masalah lain pada ETA yang bekerja berbasis umpan balik akustik adalah adanya interferensi pada kemampuan tuna netra untuk membaca lingkungan melalui pendengarannya.
Berdasarkan keterbatasan tersebut, Borenstein, Shoval dan Ulrich mengembangkan perangkat bantu tuna netra berbasis teknologi robotika, diberi nama
NavBelt dan GuideCane [7]. NavBelt dan GuideCane menggunakan teknologi penghindaran tabrakan pada robot bergerak. NavBelt digunakan seperti sabuk yang dilengkapi sensor-sensor ultrasonik di sekelilingnya. Sinyal akustik yang dihasilkan disampaikan ke pengguna melalui
earphone stereo. Lingkungan sekitar “diperlihatkan” sebagai citra panoramik akustik virtual. Kekurangan
NavBelt adalah pengguna sulit mengartikan sinyal dengan cepat sehingga pengguna tidak dapat bergerak cepat. GuideCane merupakan perangkat beroda yang dapat didorong oleh pengguna menggunakan tongkat yang terpasang pada perangkat tersebut. Ketika mendeteksi ada rintangan di depannya, GuideCane
akan bergerak menghindar. Pengguna akan merasakan gerak berputar ini dan dapat mengikuti jalur baru ini dengan mudah tanpa perlu usaha dan konsentrasi tinggi.
Penelitian yang dibahas pada makalah ini mencoba membangun dan menyempurnakan perangkat bantu tuna netra yang telah ada menggunakan konsep sistem kognitif dan teknologi wahana gerak mandiri.
3. SISTEM KOGNITIF BERBASIS WAHANA GERAK MANDIRI
Sistem kognitif adalah suatu sistem yang memiliki kemampuan kognitif. Berarti sistem tersebut memiliki kemampuan untuk memproses informasi yang diperoleh dari lingkungan sekitar melalui indera yang dimilikinya, membuat persepsi terhadap apa-apa yang dilihat atau dirabanya, serta berfikir untuk memutuskan aksi apa yang hendak dilakukan untuk mengatasi keadaan yang dihadapinya. Dengan kata lain, sistem kognitif memiliki karakteristik : “knowing”, “learning”, “understanding” dan “acting”.
Wahana gerak mandiri (autonomous vehicle) merupakan pengembangan dari teknologi robot bergerak (mobile robot). Wahana gerak mandiri adalah suatu kendaraan (robot) yang dapat bergerak atau berpindah tempat untuk menyelesaikan tugas tanpa intervensi atau dikendalikan oleh manusia. Wahana ini menyelesaikan tugas berdasarkan informasi atau persepsi lingkungan yang dirabanya sendiri. Hubungan antara wahana gerak mandiri engan manusia hanya dalam hal menerima perintah yang harus dilakukan serta melaporkan hasil kerjanya.
Wahana gerak mandiri tidak dibuat untuk menggantikan manusia, tetapi untuk membantu manusia atau melengkapi keterbatasan manusia, terutama pada lingkungan atau kondisi tertentu yang sulit diatasi oleh manusia.
Agar wahana gerak mandiri memiliki karakteristik sistem kognitif, maka wahana tersebut harus memiliki kemampuan kognitif, seperti :
1. mengetahui posisinya,
2. mengetahui apa yang berada dalam lingkungannya,
3. melakukan representasi / membuat model lingkungan kerjanya,
4. membuat perencanaan tentang apa yang akan dilakukan berdasarkan representasi yang dimiliki,
5. dapat membuat keputusan walaupun representasi yang diperoleh tidak sempurna atau memadai, 6. dapat melaksanakan dan memonitor pelaksanaan
tugas yang telah direncanakan.
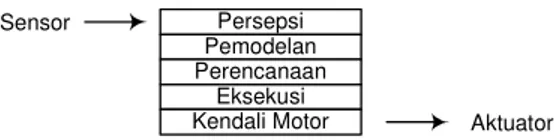
Pada wahana gerak mandiri, kemampuan kognitif ini dapat didekomposisikan seperti diperlihatkan pada gambar 1.
Persepsi Pemodelan Perencanaan Eksekusi Kendali Motor Sensor Aktuator
Gambar 1. Dekomposisi kemampuan kognitif Persepsi berfungsi untuk mengumpulkan informasi dari lingkungan kerjanya, pemodelan berfungsi untuk membangun model lingkungan berdasarkan persepsi wahana gerak mandiri terhadap lingkungannya, perencanaan berfungsi untuk membuat rencana pergerakan wahana, eksekusi berfungsi untuk menggerakkan wahana berdasarkan rencana yang
telah dibuat, kendali motor berfungsi untuk melakukan pengendalian tingkat rendah.
Berdasarkan dekomposisi kemampuan kognitif tersebut, diturunkan komponen-komponen yang menyusun sistem kognitif berbasis wahana gerak mandiri seperti diperlihatkan pada arsitektur gambar 2.
Gambar 2. Arsitektur wahana gerak mandiri Gambar 2 memperlihatkan arsitektur wahana gerak
mandiri yang terdiri dari beberapa subsistem dengan fungsi tertentu. Sensor navigasi bertugas untuk melakukan penginderaan lingkungan kerja wahana. Data yang diperoleh dari sensor kemudian diekstraksi dan dimodelkan oleh subsistem pemodelan untuk mendapatkan informasi persepsi wahana mengenai lingkungannya. Seluruh informasi yang diperoleh dikumpulkan dan disusun oleh subsistem pembuat peta untuk mendapatkan peta lingkungan kerja wahana. Estimasi posisi bertugas untuk melakukan perhitungan posisi absolut wahana dalam lingkungannya. Subsistem estimasi posisi bekerja dengan cara membandingkan informasi yang teraba dengan peta lingkungan yang dimilikinya. Manusia memberikan perintah yang merupakan tujuan pergerakan wahana ke subsistem perencanaan jalur. Selanjutnya subsistem ini melakukan perhitungan untuk mencari jalur terbaik dari posisi awal ke posisi tujuan yang diinginkan. Jalur yang diperoleh ini diterjemahkan oleh subsistem kendali gerak menjadi sinyal-sinyal listrik ke aktuator atau roda penggerak. Bila selama perjalanan, wahana mendeteksi adanya rintangan, maka subsistem penghindaran tabrakan bertugas untuk mengantisipasi tabrakan yang mungkin terjadi dengan cara membuat jalur baru yang membimbing wahana menghindari rintangan tersebut, kemudian kembali lagi ke jalur semula.
Keseluruhan sistem ini membentuk suatu sistem navigasi wahana gerak mandiri.
4.
SISTEM KOGNITIF PERANGKAT BANTU TUNA NETRASistem kognitif yang dibuat memiliki bentuk fisik menyerupai GuideCane. Sebelum berjalan, pengguna dapat menentukan tujuan perjalanannya dengan cara menekan keypad yang terletak pada gagang tongkat. Selanjutnya sistem kognitif akan memandu pengguna menuju tempat yang diinginkan. Pengguna hanya tinggal mengikuti sistem kognitif tersebut sambil memegang tongkatnya.
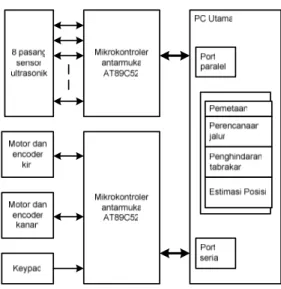
Sistem kognitif ini memiliki 8 pasang sensor ultrasonik yang dipasang di sekeliling badannya. Penggerak menggunakan dua buah roda yang digerakkan oleh motor DC, terpasang di sebelah kanan dan kiri sistem kognitif tersebut. Skenario gerakan menggunakan metoda differential drive. Pengendali utama menggunakan sebuah PC dibantu dengan dua buah mikrokontroler AT89C52 sebagai pengendali antarmuka untuk sensor dan motor. Komunikasi antara mikrokontroler dan PC menggunakan port serial dan port paralel. Perangkat keras penyusun sistem kognitif diperlihatkan pada gambar 3.
Gambar 3. Blok perangkat keras
Perangkat lunak navigasi sistem kognitif terdiri dari subsistem pemetaan, perencanaan jalur, penghindaran tabrakan dan estimasi posisi yang diprogram pada PC utama. Pemetaan menggunakan metoda Histogram in Motion Mapping [4], perencanaan jalur menggunakan metoda A* [3], penghindaran tabrakan menggunakan metoda Vector Field Histogram [1] dan estimasi posisi menggunakan metoda dead reckoning / odometri [3].
5. REALISASI DAN EKSPERIMEN
Sistem kognitif mandiri perangkat bantu tuna netra berbasis teknologi wahana gerak mandiri ini telah dan masih terus dikembangkan. Hasil yang telah dicapai saat ini adalah terbangunnya model enjiniring dari sistem kognitif yang digunakan untuk pengujian di laboratorium. Pengendali utama menggunakan komputer notebook PC yang diletakkan di atas perangkat (gambar 4).
Gambar 4. Model enjiniring sistem kognitif
Gambar 5. Sistem kognitif dan penggunanya
Dari hasil eksperimen terlihat bahwa kemmpuan navigasi sistem kognitif sudah dapat bekerja dengan baik. Subsistem pemetaan dapat melakukan pembuatan peta selama perjalanan wahana mencapai tujuannya. Sistem perencanaan jalur dapat merencanakan jalur dari posisi awal ke posisi tujuan. Sistem penghindaran tabrakan dapat membuat jalur baru untuk menghindari tabrakan. Hasil eksperimen secara keseluruhan menunjukkan sistem kognitif dapat bergerak membimbing penggunanya mencapai tujuan yang ditentukan tanpa menabrak rintangan di sekelilingnya.
6
.
DISKUSIDengan menggunakan sistem kognitif sebagai perangkat bantu tuna netra, diharapkan interaksi antara manusia dengan lingkungannya dapat dilakukan lebih manusiawi. Manusia tidak perlu secara aktif meraba lingkungannya. Hal tersebut seluruhnya dilakukan oleh sistem kognitif.
Tahap berikutnya adalah menguji perangkat di luar laboratorium, menguji perangkat pada pengguna sebenarnya (tuna netra), serta menyempurnakan kerja perangkat, khususnya pada sistem sensor dan penggerak.
7. UCAPAN TERIMA KASIH
Ucapan terima kasih diberikan kepada Ibu Lanny Pandjaitan, Bapak Harlianto Tanudjaja, Lukas, dan seluruh anggota Cognitive Engineering Research Group Universitas Atma Jaya Jakarta yang telah membantu merealisasikan konsep sistem kognitif ini menjadi suatu perangkat nyata.
8. REFERENSI
[1] Borenstein, Koren, “The Vector Field Histogram – Fast Obstacle Avoidance for Mobile Robots”, IEEE Journal of Robotics and Automation Vol. 7, 1991
[2] Borenstein, Ulrich, “The GuideCane – A Computerized Travel Aid for the Active Guidance of Blind Pedestrians”, Proceedings IEEE International Conference on Robotics and Automation, April 1997, hal. 1283-1288
[3] Dudek, “Computational Principles of Mobile Robotics”, Cambridge University Press, 2000 [4] Murphy, “Introduction to AI Robotics”, The
MIT Press, 2002
[5] Preston, “Cognitive Impairment”, http:// atoz.iqhealth.com/HealthAnswers/encyclopedia/ HTMLfiles/2829.html, 14 Feb 2005
[6] Shao, “Mobility Aids For the Blinds” Electronic Devices for Rehabilitation, Wiley, 1985
[7] Shoval, Ulrich, Borenstein ”Robotics-Based Obstacle-Avoidance Systems for the Blind and Visually Impaired”, IEEE Robotics and Automation magazine, Maret 2003