PROPOSAL
PENELITIANPASCASARJANA
DANA ITS TAHUN 2020
INFORMASI GEOSPASIAL BERBASIS 3D CITY MODEL MENGGUNAKAN
DATA LIDAR DAN FOTO UDARA DENGAN METODE SEMI OTOMATIS
(STUDI KASUS KOTA SURABAYA)
Tim Peneliti:
Hepi Hapsari Handayani, S.T., M.Sc., Ph.D.
(Teknik Geomatika ITS/FTSPK/ITS)
Husnul Hidayat, ST MT
(Teknik Geomatika/FTSPK/ITS)
Fendra Dwi Ramadhan, S.T.
(Teknik Geomatika/FTSPK/ITS)
DIREKTORAT PENELITIAN DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
ii
DAFTAR ISI
DAFTAR ISI ... ii
DAFTAR TABEL ... iii
DAFTAR GAMBAR ... iv
DAFTAR LAMPIRAN ... v
BAB I. RINGKASAN ... 1
BAB II. LATAR BELAKANG ... 3
BAB III. TINJAUAN PUSTAKA ... 5
3.1. Light Detection and Ranging (LiDAR) ... 5
3.2 Foto Udara ... 6
3.3. Representasi Permukaan ... 7
3.4. Sistem Tinggi ... 7
3.4. Model Kota Tiga Dimensi ... 8
3.5. Metode Semi Automatis ... 10
3.6. Semantic Rule ... 10
3.7. Level of Detail (LOD) ... 11
3.8. Uji Akurasi ... 12
3.9. Analisis Spasial Tiga Dimensi ... 13
BAB IV. METODE ... 14
4.1. Lokasi Penelitian ... 14
4.2. Data dan Peralatan ... 14
4.2.1 Data ... 14
4.2.2. Peralatan ... 15
4.3 Metode Penelitian ... 15
4.3.1. Tahapan Penelitian ... 15
4.3.2. Tahapan Pengolahan Data ... 15
4.4. Pembagian Tugas dan Luaran Penelitian ... 18
BAB V. JADWAL DAN RANCANGAN ANGGARAN BIAYA ... 19
5.1. Jadwal Pelaksanaan ... 19
5.2. Rancangan Anggaran Biaya (RAB) ... 19
BAB VI. DAFTAR PUSTAKA ... 21
iii
DAFTAR TABEL
Tabel 1. Hubungan Panjang Fokus dan Cakupan Sudut pada Foto Udara ... 6 Tabel 2. Pembagian tugas tim peneliti ... 18 Tabel 3. Jadwal pelaksanaan penelitian ... 19
iv
DAFTAR GAMBAR
Gambar 1. Pengoperasian dasar teknik LiDAR ... 5
Gambar 2. Pengembalian pulsa laser dalam sistem LiDAR ... 6
Gambar 3. Ilustrasi dari DSM dan DTM ... 7
Gambar 4. Ilustrasi tinggi ... 8
Gambar 5. Tipe atap... 9
Gambar 6. 3D City model ... 9
Gambar 7. Model 3D dari Yarmouk University ... 9
Gambar 8. Level of detail ... 11
Gambar 9. Model kota tiga dimensi dengan LOD2 ... 12
Gambar 10. Lokasi penelitian ... 14
Gambar 11. Tahapan penelitian ... 15
v
DAFTAR LAMPIRAN
1
BAB I. RINGKASAN
Era Revolusi Industri 4.0 menjadi tantangan pembangunan, termasuk dalam bidang
perencanaan. Perencanaan dalam skala yang lebih detail membutuhkan data yang lebih detail.
Ketersediaan data yang lebih lengkap dibutuhkan untuk menjamin representasi kondisi fisik
yang lebih nyata. Oleh karena itu, kebutuhan data berupa tiga dimensi (3D) adalah salah satu
komponen yang vital di dalam perencanaan. Kebutuhan informasi geospasial (IG) 3D untuk
wilayah kota sangatlah penting mengingat kota sebagai pusat kegiatan dengan jumlah
bangunan dan infrastruktur yang banyak dan memiliki karakteristik data geospasial yang multi
obyek, multi struktur dan bermacam jenis (heterogenitas). IG dalam 3D dapat digunakan
sebagai dasar dalam pengambilan keputusan terkait dengan keberlangsungan perencanaan,
pembangunan dan operasional infrastruktur di wilayah kota.
Kota Surabaya sebagai ibukota Provinsi Jawa Timur terus mengalami perkembangan
dan pembangunan kota yang pesat sebagai pusat perdagangan dan jasa skala nasional dan
internasional, dan penghubung wilayah Indonesia timur. Sehingga informasi geospasial (IG)
3D sangat diperlukan karena dapat memberikan informasi terkait dengan bangunan beseta
infrastruktur yang sangat diperlukan bagi perencanaan kota ke depan. Dengan padatnya
bangunan, maka IG berbasis 3D ini diharapkan dapat membantu pemerintah untuk
mewujudkan pembangunan yang berkelanjutan dengan penataan kota yang terencana.
Sehingga data yang dihasilkan dapat digunakan dalam pembuatan informasi sebagai acuan
dalam pengambilan kebijakan seperti dalam ijin pendirian bangunan, perencanaan lingkungan
yang nyaman maupun perencanaan untuk mitigasi bencana.
Dalam membuat 3D city model tentu diperlukan data-data yang mendukung seperti data
ketinggian, footprint bangunan, titik vegetasi, dan jaringan jalan. Data tersebut dapat diperoleh
dari Light Detection and Ranging (LiDAR) dan foto udara. Data LiDAR efektif digunakan
dalam menentukan tinggi bangunan, terutama pada bangunan gedung yang sangat tinggi yang
tidak dapat diukur dengan alat ukur ketinggian karena keterbatasan pergerakan vertikal alat.
Sementara itu foto udara dapat memberikan informasi terkait lokasi dan bentuk objek dalam
resolusi sangat tinggi. Dari hasil pengolahan foto udara ini didapatkan hasil tutupan lahan yang
sangat akurat serta bentuk bangunan dengan level of detail (LOD) yang tinggi. Penggunaan
LiDAR dan foto udara dalam membuat model kota 3D dibutuhkan seiring dengan
perkembangan infrastruktur kota dan kebutuhan peta skala besar. Adapun metode pemodelan
3D kota yang digunakan pada penelitian ini adalah semi automatis menggunakan perangkat
lunak yang telah terbangun syntax, rule, maupun grammar-nya namun tetap memasukkan
parameter-parameternya sendiri. Penerapan aturan semantik akan dilakukan pada penelitian ini
menggunakan rule berbasis Computer Generated Architecture (CGA) yang berisi serangkaian
definisi untuk menghasilkan model. Adapun parameter yang digunakan untuk mendefinisikan
objek model adalah bentuk, lokasi spasial, parameter, dan elemen seperti jendela, pintu,
ketinggian, ketinggian lantai, dan tekstur.
Dalam penelitian ini didefinisikan lima objek yaitu perumahan (planned/row house),
permukiman (unplanned house), gedung tinggi (high rise building), dan jalan beserta fiturnya.
Perumahan merujuk pada rumah yang terdiri atas baris-baris serta teratur. Permukiman
merujuk pada tempat tinggal penduduk di suatu kawasan yang kurang teratur dan tidak tertata.
Jalan merupakan jaringan jalan secara umum sedangkan fitur jalan meliputi lampu jalan,
2
trotoar, dan tempat penyeberangan. Dari kelima kelas tersebut akan dilakukan validasi dari segi
LOD maupun volume untuk kemudian dianalisis berdasarkan hasil validasi maupun proses
pembuatannya. Validasi dilakukan dengan mengambil data terestris berupa koordinat dan
volume objek. Hasil dari validasi berupa nilai completeness (kelengkapan), correctness
(kebenaran), quality (kualitas), dan standar deviasi volume tiap objek. Selanjutnya akan
dilakukan analisis visibilitas. Dari penelitian ini diharapkan bisa memberikan model kota 3D
yang akurat bagi Kota Surabaya. Sehingga penelitian ini bertujuan untuk membangun
informasi geospasial berbasis tiga dimensi (3D) city model menggunakan data LiDAR dan foto
udara di Kota Surabaya pada kawasan yang memiliki perbedaan karakteristik. IG berbasis 3D
model yang dihasilkan divalidasi berdasarkan akurasi volume dan LOD-nya. Tujuan kedua
yaitu mengetahui pengaruh metode semi automatis pada penerapan roof rule yang
berbeda-beda dalam membangun sebuah model kota 3D. Sedangkan tujuan yang ketiga yaitu
mengetahui kondisi spasial lokasi studi berdasarkan analisis visibilitas tiga dimensi dan
menganalisis dampak adanya gedung tinggi di wilayah tersebut.
3
BAB II. LATAR BELAKANG
Bumi sebagai tempat aktivitas manusia memiliki bentuk tiga dimensi (3D) oleh karena itu kebutuhan informasi 3D saat ini merupakan hal yang penting dalam mendukung setiap aktivitas manusia. Dalam aplikasi dan kajian kebutuhan informasi 3D tak lepas dari adanya informasi spasial yang memiliki referensi geografis atau disebut juga data geospasial. Kebutuhan informasi geospasial 3D untuk wilayah kota sangatlah penting mengingat kota sebagai pusat kegiatan dengan jumlah bangunan dan infrastruktur yang banyak dan memiliki karakteristik data geospasial yang multi objek, multi struktur dan bermacam jenis (heterogenitas). Informasi visualisasi data geospasial 3D dapat digunakan sebagai dasar dalam pengambilan keputusan terkait dengan keberlangsungan perencanaan, pembangunan dan operasional infrastruktur di wilayah kota. Saat ini perencanaan wilayah kota (urban design) yang dilakukan di Indonesia masih berbasiskan informasi 2D yang diperoleh dari peta skala besar, padahal konsep ruang perencanaan tidak hanya untuk 2D tetapi memiliki aspek 3D. Informasi 3D khususnya untuk wilayah kota atau dikenal dengan nama 3D CGIS (3D City Geographic Information System) merupakan alat bantu yang dapat digunakan untuk melakukan visualisasi, memberikan informasi atribut dan analisis perencanaan, pembangunan dan monitoring wilayah kota (Batara 2012).
Kota Surabaya merupakan ibukota Provinsi Jawa Timur sekaligus kota metropolitan terbesar kedua di Indonesia setelah Jakarta memiliki lokasi yang sangat strategis berada hampir di tengah wilayah Indonesia dan tepat di selatan Asia menjadikannya sebagai salah satu hub penting bagi kegiatan perdagangan di Asia Tenggara. Kini Surabaya menjadi pusat kegiatan komersial, perdagangan, sosial, ekonomi, keuangan, kesehatan dan bisnis di daerah Jawa Timur dan sekitarnya. Perkembangan Kota Surabaya yang sangat pesat dipicu oleh dinamika dan aktivitas kota yang sangat tinggi menuntut adanya pembagian wilayah pengembangan kota menjadi beberapa zona. Menurut Peraturan Daerah Kota Surabaya No. 8 Tahun 2018 tentang Rencana Detail Tata Ruang dan Peraturan Zonasi Kota Surabaya tahun 2018-2038, Kota Surabaya terbagi menjadi 8 Unit Pengembangan (UP) salah satunya adalah UP VI Tunjungan.
UP VI Tunjungan merupakan salah satu rencana kawasan strategis di Kota Surabaya yang memiliki tujuan sebagai pusat perdagangan, jasa skala nasional dan internasional, pusat pemerintahan dan kawasan permukiman yang berkarakter. UP VI Tunjungan meliputi seluruh Kecamatan Simokerto, Kecamatan Bubutan, Kecamatan Tegalsari dan Kecamatan Genteng. Sebagai kawasan pusat perdagangan dan perkantoran, kawasan UP VI Tunjungan menjadikannya salah satu pusat kota yang sangat potensial untuk terus dikembangkan. Pertumbuhan bangunan pada kawasan UP VI Tunjungan yang mayoritas terdiri dari gedung bertingkat, kantor pemerintahan, bangunan bersejarah maupun permukiman membutuhkan suatu analisis secara geospasial 3D dalam menunjang tercapainya pengembangan wilayah kota sesuai pada Rencana Detail Tata Ruang dan Peraturan Zonasi Kota Surabaya tahun 2018-2038.
Rekonstruksi model kota 3D dapat dilakukan dari berbagai sumber data, seperti LiDAR, titik awan, foto udara, citra satelit, foto UAV (kendaraan udara tak berawak) atau kombinasi data DSM (Digital Surface Model) dengan peta kadaster. LiDAR adalah perangkat atau sistem yang sering digunakan pada aktivitas-aktivitas survei, pengukuran, atau pengamatan yang menggunakan teknik atau metode penginderaan jauh (remote sensing) aktif dengan cahaya optis dalam bentuk pulsa-pulsa sinar laser untuk mengukur jarak-jarak terhadap objek-objek permukaan bumi dengan kerapatan dan akurasi yang tinggi (Prahasta 2015). Data LiDAR efektif digunakan dalam menentukan tinggi bangunan, terutama pada bangunan gedung yang sangat tinggi yang tidak dapat diukur dengan alat ukur ketinggian karena keterbatasan pergerakan vertikal alat. Kerapatan dan akurasi elevasi data LiDAR sebesar 15-20 cm, sehingga ketinggian bangunan dapat dihitung dengan akurasi tinggi (Atmaja 2016). Selain itu,
4
LiDAR mampu memberikan hasil yang baik untuk penataan ruang kawasan baik skala kecil maupun besar.
Sementara itu foto udara dapat memberikan informasi terkait lokasi dan bentuk objek dalam resolusi sangat tinggi. Dari hasil pengolahan foto udara ini didapatkan hasil tutupan lahan yang sangat akurat serta bentuk bangunan dengan Level of Detail (LOD) yang tinggi. Penggunaan LiDAR dan foto udara dalam membuat model kota tiga dimensi dibutuhkan seiring dengan perkembangan infrastruktur kota dan kebutuhan peta skala besar. Kota Surabaya telah melakukan pemetaan LiDAR dan foto udara atas alasan ini. Sehingga data yang dihasilkan dapat digunakan dalam pembuatan informasi sebagai acuan dalam pengambilan kebijakan.
Terdapat banyak metode yang dapat dilakukan untuk membuat model kota tiga dimensi. Pemodelan kota tiga dimensi dapat dilakukan secara manual maupun semi automatis. Manual berarti peneliti membuat sendiri syntax, rule, maupun grammar-nya dengan berbagai bahasa pemrograman. Sedangkan semi automatis berarti menggunakan perangkat lunak yang telah terbangun syntax, rule, maupun grammar-nya namun tetap memasukkan parameter-parameternya sendiri. Contoh dari cara manual adalah metode data-driven (bottom-up), model-driven (top-down), dan hybrid approaches (Zheng 2017). Setiap metode memiliki kekurangan dan kelebihan masing-masing. Metode data-driven memiliki keunggulan dalam mendeteksi elemen-elemen dasar, seperti batas, punggungan dan tepi langkah, tetapi kualitas rekonstruksi dibatasi oleh algoritma yang digunakan untuk segmentasi bidang atap. Metode model-driven memiliki batasan yaitu bahwa ada jenis model terbatas yang disimpan di penyimpanan yang telah ditentukan.
Dalam penelitian yang dilakukan oleh Parish dan Muller (2001) terdapat cara baru memodelkan seluruh kota secara semi otomatis dengan perangkat lunak yang mereka sebut perangkat lunak CityEngine. CityEngine menggunakan L-sistem yang dimodifikasi untuk menumbuhkan jaringan. Jaringan dapat diatur dalam beberapa menit dengan proses otomatisasi tetapi jika pengguna ingin mengubahnya, ia dapat membuat jaringan secara manual. Penggunaan metode semi automatis ini dapat menghasilkan model kota tiga dimensi dalam waktu yang singkat dengan ketelitian yang cukup tinggi serta tampilan yang menarik (Turksever 2015). Penerapan aturan semantik sangat ditekankan dalam prosedur pemodelan menggunakan metode semi automatis. Rule dari metode semi automatis adalah file teks CGA (Computer Generated Architecture) yang berisi serangkaian definisi dan dapat memutuskan bagaimana menghasilkan model. Dengan kata lain ia mendefinisikan objek model seperti bentuk, lokasi spasial, parameter, dan elemen seperti jendela, pintu, ketinggian, ketinggian lantai, tekstur, gaya, dan atribut lainnya dalam file teks.
Dalam penelitian ini didefinisikan lima objek kajian yaitu perumahan (planned/row house), permukiman (unplanned house), gedung tinggi (high rise building), dan jalan beserta fiturnya. Perumahan merujuk pada rumah yang terdiri atas baris-baris serta teratur. Permukiman merujuk pada tempat tinggal penduduk di suatu kawasan yang kurang teratur dan tidak tertata. Jalan merupakan jaringan jalan secara umum sedangkan fitur jalan meliputi lampu jalan, trotoar, dan tempat penyeberangan. Dari kelima kelas tersebut akan dilakukan validasi dari segi LOD maupun volume untuk kemudian dianalisis berdasarkan hasil validasi maupun proses pembuatannya. Validasi dilakukan dengan mengambil data terestris berupa koordinat dan volume objek. Hasil dari validasi berupa nilai completeness (kelengkapan), correctness (kebenaran), quality (kualitas), dan standar deviasi volume tiap objek. Sehingga penelitian ini bertujuan untuk membangun informasi geospasial berbasis tiga dimensi (3D) city model menggunakan data LiDAR dan foto udara di Kota Surabaya pada kawasan yang memiliki perbedaan karakteristik. Informasi geospasial yang dihasilkan divalidasi berdasarkan akurasi volume dan level of detail (LOD)nya. Tujuan kedua yaitu mengetahui pengaruh metode semi automatis pada penerapan roof rule yang berbeda-beda dalam membangun sebuah model kota 3D. Sedangkan tujuan yang ketiga yaitu mengetahui kondisi spasial lokasi studi berdasarkan analisis visibilitas tiga dimensi dan menganalisis dampak adanya gedung tinggi di wilayah tersebut.
5
BAB III. TINJAUAN PUSTAKA
3.1. Light Detection and Ranging (LiDAR)
Light Detection and Ranging (LiDAR) adalah salah satu teknik penginderaan jauh yang juga dikenal sebagai light amplification by stimulated emission of radiation (laser) scanning (pemindai laser). Teknik ini dapat membantu pekerjaan survei topografi yang sangat terperinci dan akurat sejak awal abad kedua puluh satu (Carter dkk 2001). LiDAR dapat memeroleh lebih dari 10.000 titik dalam koordinat tiga dimensi (3D) cartesian (koordinat X, Y, dan Z) dalam setiap detiknya, baik dilakukan dalam posisi tetap maupun bergerak. Titik-titik yang dihasilkan ini disebut point cloud.
Menurut Jaboyedoff, dkk. (2018), perangkat lidar terdiri dari kombinasi antara pemancar laser (rangefinder laser) dan mekanisme pemindaian yang dapat mengukur jarak ke target dan orientasinya dari sinar laser (laser beam). Perangkat pemindai bekerja dengan rotasi internal satu atau dua cermin dan/atau rotasi seluruh perangkat. Komponen tambahan biasanya termasuk unit elektronik, perangkat pencitraan (misalnya kamera digital), dan perangkat lunak khusus untuk mengendalikan keseluruhan sistem.
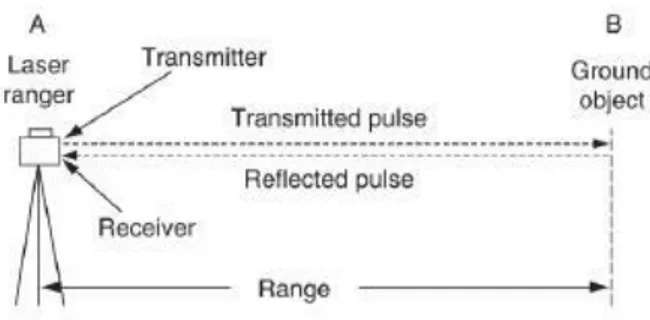
Gambar 1. Pengoperasian dasar teknik LiDAR (Petrie dan Toth 2009)
Prinsip LiDAR mirip dengan electronic distance measuring instrument (EDMI). Laser ditembakkan dari pemancar kemudian energi yang dipantulkan ditangkap kembali olehnya. Pengukuran LiDAR didasarkan pada jarak sepanjang line of sight (LOS) antara pemancar dan reflektor. Reflektor dapat berupa objek alami atau buatan seperti prisma. Pengukuran ini disebut juga sebagai time of flight (TOF). Pemancar laser akan mengukur interval waktu antara pulsa yang dipancarkan oleh pemancar yang terletak di titik A dan kembalinya setelah direfleksikan oleh objek yang terletak di titik B (lihat Gambar 3.1). Berdasarkan Petrie dan Toth (2009), persamaan jarak berdasarkan TOF dinyatakan sebagai berikut:
𝑑 = 𝑐 × ∆𝑡/2 (3.1)
Keterangan: 𝑑 = jarak (meter)
𝑐 = kecepatan cahaya di udara (3 × 108 m/s)
∆𝑡 = time of flight (sekon)
Hasil dari LiDAR berupa titik-titik yang memiliki nilai koordinat dan tinggi. titik-titik ini disebut dengan point cloud. Point cloud adalah sekumpulan data berupa titik-titik pada beberapa sistem koordinat. Data tersebut diproses pasca survei pengumpulan data melalui sistem lidar. Dalam sistem koordinat tiga dimensi (3D) kartesian, titik-titik ini ditentukan oleh koordinat X, Y, dan Z, dan sering dimaksudkan untuk mewakili permukaan eksternal dari suatu objek.
6
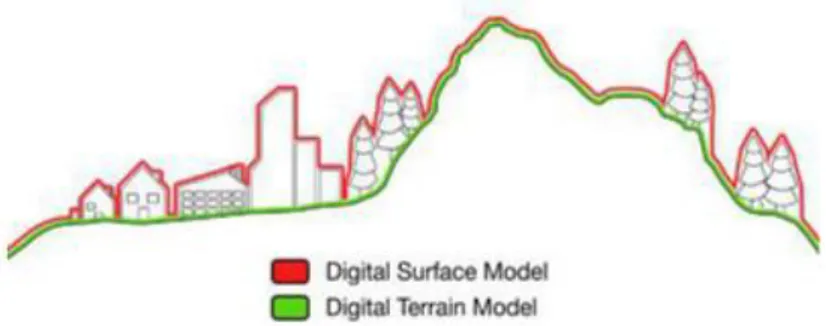
Gambar 2. Pengembalian pulsa laser dalam sistem LiDAR (Esri 2012)
Pulsa laser yang dipancarkan dari sistem LiDAR memantul baik dari permukaan objek maupun permukaan tanah (Esri 2015). Satu pulsa laser yang dipancarkan dapat kembali ke sensor LiDAR dengan satu atau banyak yang dikembalikan. Pulsa laser yang dikembalikan pertama adalah objek tertinggi di lanskap seperti puncak pohon, bagian atas bangunan, atau bahkan tanah (ground) jika tidak ada objek di atas permukaan tanah. Pengembalian pulsa laser menengah secara umum digunakan untuk struktur vegetasi. Pengembalian pulsa laser terakhir biasanya digunakan untuk model elevasi tanah (terrain), namun dalam beberapa kasus, tanah tidak selalu menjadi pengembalian terakhir karena pulsa laser tidak dapat mencapainya akibat tebalnya objek di atas permukaan tanah.
Data LiDAR disimpan dalam format biner yang disebut LAS. LAS merupakan format file standar yang diterbitkan oleh American Society for Photogrammetry and Remote Sensing (ASPRS) untuk pertukaran data LiDAR (Esri 2012). Setiap file LAS berisi metadata dari survei LiDAR yang disertai catatan individual untuk setiap pulsa laser yang terekam.
3.2 Foto Udara
Dalam kegiatan fotogrametri, ada dua jenis foto yang dihasilkan berdasarkan cara pengambilan data yaitu foto terestrial dan foto udara. Foto terestrial diambil dengan kamera yang berada di permukaan Bumi, sedangkan foto udara diambil dengan kamera yang dipasang pada wahana terbang di udara. Berdasarkan perbedaan jenis tersebut, dapat diketahui bahwa foto udara merupakan produk dari bidang spesialisasi fotogrametri udara (aerial photogrammetry). Foto udara dapat diklasifikasikan berdasarkan tiga sudut pandang. Klasifikasi tersebut dilihat dari orientasi sumbu kamera, panjang fokus kamera, dan jenis emulsi. Menurut Schenk (2005) klasifikasi berdasarkan orientasi kamera terdiri dari: True vertical (vertikal sempurna) adalah jenis foto dengan poros kamera vertikal sempurna, near vertical (hampir vertikal) adalah jenis foto dengan kemiringan dibatasi kurang dari dua hingga tiga derajat., dan oblique (miring) adalah jenis foto dengan poros kamera yang dimiringkan antara vertikal dan horizontal. Total area foto miring jauh lebih besar daripada foto vertikal. Foto miring memiliki sub-kelas yaitu low oblique (miring rendah) dan high oblique (miring tinggi). Selanjutnya klasifikasi berdasarkan panjang fokus kamera dibagi menjadi lima kelas sebagai berikut.
Tabel 1. Hubungan Panjang Fokus dan Cakupan Sudut pada Foto Udara (Schenk 2005)
Klasifikasi Panjang Fokus (mm) Cakupan Sudut (°)
Super-Wide 85 119
Wide-Angle 157 82
7
Tabel 3.1 Lanjutan
Klasifikasi Panjang Fokus (mm) Cakupan Sudut (°)
Normal-Angle 305 46
Narrow-Angle 610 24
Terakhir adalah klasifikasi berdasarkan jenis emulsi, dibagi menjadi empat yaitu: foto panchromatic black and white (pankromatik hitam-putih), foto color (berwarna) adalah jenis foto yang memiliki warna pada objek yang tergambar mirip dengan objek aslinya, foto infrared black and white (inframerah hitam-putih) adalah jenis foto dengan menggunakan panjang gelombang (spectrum) inframerah dekat, dan foto false color (berwarna semu) adalah jenis foto yang memiliki warna pada objek yang tergambar tidak sama dengan objek aslinya.
3.3. Representasi Permukaan
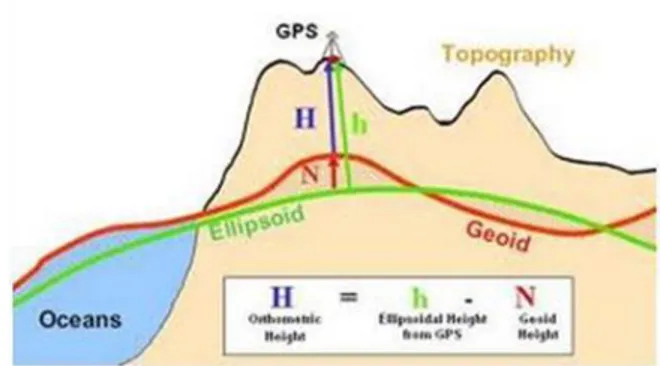
Digital Surface Model (DSM) yang sering disebut sebagai model permukaan bumi yang mencakup fitur medan, bangunan, vegetasi, dan saluran listrik dll, oleh karena itu DSM dapat merepresentasikan topografi dari permukaan bumi. Sedangkan Digital Terrain Model (DTM) digunakan untuk mewakili permukaan terrain dari bumi atau permukaan tanah. DTM merupakan representasi statistik permukaan kontinu tanah dari sekumpulan besar titik yang terpilih dengan koordinat x, y, z dengan referensit tertentu (Kennie dan Petrie 1990).
Perbedaan antara DSM dan DTM dalam merepresentasikan objek di lapangan dapat dilihat pada Gambar 3.3. DSM merepresentasikan seluruh objek di atas permukaan tanah sedangkan DTM hanya merepresentasikan permukaan tanah saja. Sedangkan Digital Elevation Model (DEM) merupakan salah satu model untuk menggambarkan bentuk topografi permukaan bumi sehingga dapat divisualisasikan kedalam tampilan 3D (tiga dimensi). DEM ini yang nantinya akan dijadikan sebagai acuan setiap pengukuran.
Gambar 3. Ilustrasi dari DSM dan DTM (Wikantika, dkk. 2015)
3.4. Sistem Tinggi
Sistem tinggi adalah sistem koordinat satu dimensi yang digunakan untuk menentukan jarak metrik suatu titik dari permukaan referensi di sepanjang jalur yang terdefinisi dengan baik, yang disebut hanya ketinggian titik itu. Meskipun tampak sederhana, ketinggian suatu titik dapat didefinisikan dalam banyak cara yang agak berbeda yang masing-masing memberikan koordinat ketinggian yang berbeda untuk titik yang sama. Dengan demikian, definisi dan penggunaan istilah 'tinggi' perlu sangat diperhatikan (Featherstone, dkk 2010).
8 Berikut adalah jenis-jenis tinggi.
1. Tinggi Normal
Tinggi normal merupakan sistem tinggi dengan bidang acuan terhadap Ellipsoid. Tinggi yang digunakan adalah tinggi h. Ketinggian h terhadap ellipsoid referensi dihitung sepanjang garis normal n’ yang melalui titik tesebut. Menggunakan metode satelit, misalnya GPS. 2. Tinggi Orthometrik
Tinggi orthometric merupakan sistem tinggi dengan bidang acuan terhadap geoid. Ketinggian H terhadap geoid dihitung sepanjang garis unting-unting n yang melalui titik tersebut. Menggunakan pengukuran sifat datar yang dilengkapi dengan pengukuran gaya berat. Berikut adalah ilustrasi dari tinggi normal dan tinggi orthometric.
Gambar 4. Ilustrasi tinggi (Ramdani 2012) 3. Tinggi Dinamis
Prinsip tinggi dinamis adalah titik-titik yang terletak pada bidang ekuipotensial yang sama memiliki “tinggi” yang sama. Tinggi dinamis dapat dinyatakan dengan banyaknya lapisan-lapisan bidang ekuipotensial, sehingga memiliki satuan potensial.
3.4. Model Kota Tiga Dimensi
Model kota tiga dimensi adalah representasi digital dari permukaan bumi dan benda terkaitnya seperti bangunan, vegetasi, dan beberapa fitur buatan manusia milik daerah perkotaan. Model kota 3D pada dasarnya berisi model kota yang terkomputerisasi atau digital representasi grafis dari bangunan dan objek lain dalam 2,5 atau 3D. Secara umum tiga pendekatan dalam Geomatika digunakan untuk generasi model Virtual 3D City. Pendekatan pertama menggunakan teknik konvensional seperti data peta vektor, DEM, dan foto udara. Pendekatan kedua didasarkan pada resolusi tinggi citra satelit dengan pemindaian laser. Pada pendekatan ketiga, banyak peneliti menggunakan gambar terestrial dengan menggunakan fotogrametri jarak dekat dengan pemetaan DSM & tekstur (Singh dkk 2013).
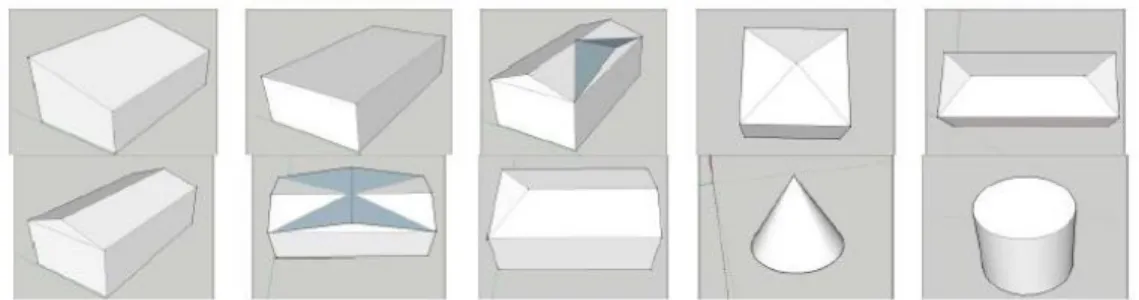
Dalam pemodelan kota tiga dimensi, satu hal yang penting adalah pendefinisian dari tipe atap suatu bangunan. Berikut merupakan contoh tipe atap yang umum digunakan pada bangunan.
9
Gambar 5. Tipe atap (Zheng 2017)
Berikut merupakan contoh model kota 3D yang telah dibuat oleh peneliti sebelumnya. a. Model kota 3D menggunakan foto udara dan peta kadaster
Flamanc (2003) membuat rekonstruksi bangunan kerangka kerja untuk produksi model kota 3D dengan menggunakan foto udara dan peta kadaster. Mereka menguji model yang dihasilkan dengan data pendekatan.
Gambar 6. 3D City model (Flamanc dkk 2003) b. Model kota 3D menggunakan SIG (Sistem Informasi Geografis)
Al-Hanbali dkk (2006) membuat model tiga dimensi untuk Universitas Yarmouk dengan menggunakan SIG dan fotogrametri.
Gambar 7. Model 3D dari Yarmouk University (Al-Hanbali dkk 2006)
10 c. Model kota 3D menggunakan Citra Satelit
Huang dkk (2008), mengusulkan metode untuk rekonstruksi objek dari satelit resolusi tinggi menggunakan teknik Monoplotting. Mereka menggunakan Rational Polynomial Coefficients (RPC) dan Digital Elevation Model (DEM) resolusi tinggi untuk mencapai geometri presisi tinggi dari objek tiga dimensi yang direkonstruksi. Sinar satelit menentukan RPC dan bayangan objek di tanah, menentukan dari sudut azimuth dan ketinggian matahari. Poligon diekstraksi secara manual dari atas permukaan suatu objek, digunakan untuk prediksi posisi dasar dan bayangan pada citra satelit 2D berdasarkan ketinggian objek. Ketinggian objek ditentukan dari dasar yang diprediksi.
3.5. Metode Semi Automatis
Terdapat banyak metode yang dapat dilakukan untuk membuat model kota tiga dimensi. Bisa secara manual maupun semi automatis. Manual berarti peneliti membuat sendiri syntax, rule, maupun grammar nya dengan berbagai bahasa pemrograman. Sedangkan semi automatis adalah menggunakan perangkat lunak yang telah terbangun syntax, rule, maupun grammar nya namun tetap memasukkan parameter-parameternya sendiri. Contoh dari cara manual adalah metode data-driven (bottom-up), model-driven (top-down), dan hybrid approaches (Zheng 2007). Untuk metode data-driven (bottom-up), bangunan dianggap sebagai agregasi bidang atap yang diwakili oleh blok point cloud atau digital surface model (DSM) yang disegmentasi ke dalam bagian yang berbeda dengan memanfaatkan algoritma seperti region growing, random sampe consensus (RANSAC), clustering, ridge or edge based, atau kombinasi dari dua atau beberapa dari mereka (Awrangjeb 2013). Metode model-driven (top-down), mengembangkan model pembangunan parametrik, yang disimpan dalam file yang telah ditentukan untuk merekonstruksi blok point cloud atau DSM. Bayesian menemukan konfigurasi optimal blok 3D menggunakan sampel Markov Chain Monte Carlo (MCMC) yang terkait dengan kernel proposisi asli (Arefi 2008). Banyak peneliti mencoba memanfaatkan hybrid approaches, yaitu mengintegrasikan pendekatan berbasis data (data driven) dan didorong oleh model (model driven) karena mereka pikir itu mungkin menghasilkan model bangunan yang lebih berkualitas (lebih lengkap dan terperinci). Prinsipnya adalah menggunakan pendekatan berbasis data untuk mendeteksi fitur seperti ridges dan edge sebagai pengetahuan sebelumnya untuk pendekatan berbasis model berikutnya (Tian dkk 2010).
Dalam penelitian yang dilakukan oleh Parish dan Muller (2001) terdapat cara baru memodelkan seluruh kota secara semi otomatis dengan perangkat lunak yang mereka sebut perangkat lunak CityEngine. CityEngine menggunakan L-sistem yang dimodifikasi untuk menumbuhkan jaringan. Jaringan dapat diatur dalam beberapa menit dengan proses otomatisasi tetapi jika pengguna ingin mengubahnya, ia dapat membuat jaringan secara manual. Penggunaan metode semi automatis ini dapat menghasilkan model kota tiga dimensi dalam waktu yang singkat dengan ketelitian yang cukup tinggi serta tampilan yang menarik (Turksever 2015).
3.6. Semantic Rule
Penerapan semantic rule sangat ditekankan dalam prosedur pemodelan menggunakan metode semi automatis. Rule dari metode semi automatis adalah file teks CGA (Computer Generated Architecture) yang berisi serangkaian definisi dan dapat memutuskan bagaimana menghasilkan model. Dengan kata lain ia mendefinisikan objek model, seperti bentuk, lokasi spasial, parameter dan elemen sebagai jendela, pintu, ketinggian, ketinggian lantai, tekstur, gaya, dan atribut lainnya dalam file teks. File ini juga mencakup operasi prosedur pembuatan model dari grafik dua dimensi, seperti extrude, komponen split, intersect dan aturan operasi lainnya yang sering digunakan dalam prosedur pemodelan dan pada akhirnya menggambarkan cara mengintegrasikan aturan operasional langkah demi langkah
11
untuk menghasilkan model secara otomatis. Sebenarnya aturan yang diterapkan terdiri dari kombinasi definisi fungsi CGA biasa yang digunakan untuk mengontrol generasi model. Pada tahun 1972, Stiny mengusulkan tata bahasa bentuk yang telah membawa serangkaian bentuk dan metode baru untuk desain dan analisis kerangka arsitektur. Kemudian atas dasar ini, Wonka, Müller dan rekan mereka mempresentasikan aturan tata bahasa CGA untuk pemodelan prosedural yang dapat dengan cepat membangun model (Hu dkk 2013).
3.7. Level of Detail (LOD)
Level of Detail (LOD) merupakan suatu tingkat detail dari suatu objek atau kumpulan poligon. LOD berfungsi untuk mengurangi banyaknya poligon yang akan digambar dengan menggunakan parameter tertentu. Fungsi lain yang mungkin dapat digunakan dari LOD adalah kompresi pada penyimpanan objek dengan memperkecil tingkat detail dari suatu objek (Juniastuti 2008).
LOD sering ditemukan untuk menggambarkan karakteristik model kota 3D yang diinginkan. Mempertimbangkan LOD ketika merencanakan akuisisi data sangat penting untuk penganggaran sumber daya yang tepat, dan LOD menentukan teknologi akuisisi yang harus digunakan karena LOD yang berbeda merupakan hasil dari pendekatan akuisisi data yang berbeda, misalnya itu mendorong kerapatan point cloud minimum ketika menggunakan pemindaian laser udara, dan menentukan kondisi teknik akuisisi tertentu memadai atau membutuhkan cara akuisisi tambahan. Dalam akuisisi data, LOD berfungsi sebagai instruksi utama tentang cara teliti untuk memperoleh data. Bahkan, istilah LOD sudah dapat ditemukan di makalah awal terkait dengan akuisisi model kota 3D (Biljecki 2017). Real time visualization dari model kota 3D memerlukan representasi bangunan dalam berbagai LOD.
Gambar 8. Level of detail (Turksever 2015) Berikut merupakan tingkat LOD:
LOD0 level paling kasar pada dasarnya adalah model terrain digital dua setengah dimensi untuk peletakan gambar udara dan peta.
LOD1 adalah model blok terkenal yang terdiri dari bangunan prismatik dengan atap datar.
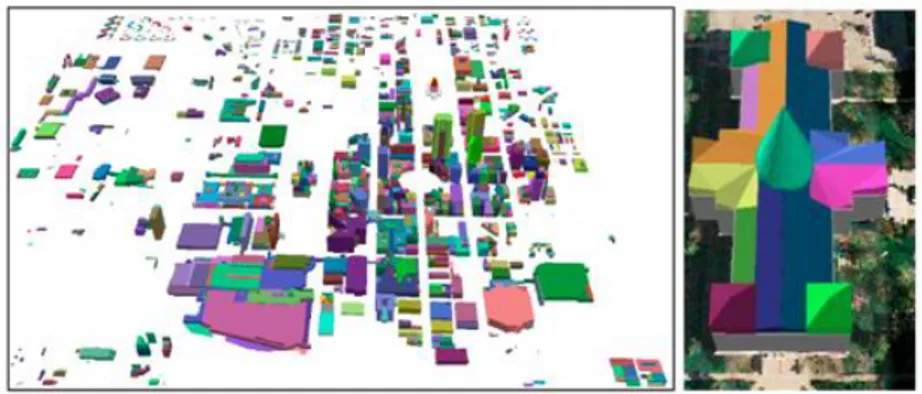
Sebaliknya, bangunan di LOD2 memiliki struktur atap yang berbeda dan secara tematis permukaan dapat dibedakan. Objek vegetasi juga dapat ditampilkan. Penambahan tekstur menjadi opsi pilihan. Berikut merupakan contoh dari model kota 3D dengan LOD 2.
LOD3 menunjukkan model arsitektur dengan detail dinding dan struktur atap, balkon, teluk, dan proyeksi. Tekstur resolusi tinggi dapat dipetakan di sini. Selain itu, detail vegetasi dan objek transportasi adalah komponen dari model LOD3
12
LOD4 melengkapi model LOD3 dengan menambahkan struktur interior untuk objek 3D. Sebagai contoh, bangunan terdiri dari kamar, pintu interior, tangga, dan perabotan (Fredericque 2015).
Gambar 9. Model kota tiga dimensi dengan LOD2 (Zheng 2017)
3.8. Uji Akurasi
Uji akurasi dilakukan untuk mengetahui tingkat keakuratan model yang dibuat. Uji akurasi ini dilakukan sebanyak dua kali dengan tujuan yang berbeda. Tujuan pertama yaitu untuk memvalidasi tinggi objek hasil pemodelan kota tiga dimensi. Sedangkan tujuan kedua yaitu untuk memvalidasi level of detail (LOD) terhadap hasil CGA rule pada bangunan. Habibullah (2014) melakukan penelitian terkait ekstraksi tinggi bangunan menggunakan foto udara dan data LiDAR. Hasil dari penelitian tersebut menunjukkan uji akurasi cukup baik. Uji akurasi pemetaan dengan menggunakan data pengukuran lapangan menunjukkan bahwa akurasi ekstraksi tinggi bangunan sebesar 86.63%. Nilai ini akan digunakan pada penelitian kali ini sebagai standar untuk menentukan kualitas hasil model kota tiga dimensi. Sedangkan untuk validasi level of detail (LOD) terhadap hasil CGA rule pada bangunan, dapat dilakukan dengan menghitung nilai kelengkapan (completeness), kebenaran (correctness), dan kualitas (quality). Menurut Zheng dkk (2017), berikut merupakan rumus untuk menghitung nilai-nilai tersebut. 𝐶𝑜𝑚𝑝𝑙𝑒𝑡𝑒𝑛𝑒𝑠𝑠 = 𝑇𝑃 𝑇𝑃+𝐹𝑁 (3.2) 𝐶𝑜𝑟𝑟𝑒𝑐𝑡𝑛𝑒𝑠𝑠 = 𝑇𝑃 𝑇𝑃+𝐹𝑃 (3.3) 𝑄𝑢𝑎𝑙𝑖𝑡𝑦 = 𝑇𝑃 𝑇𝑃+𝐹𝑁+𝐹𝑃 (3.4)
Dengan TP (True Positive) adalah jumlah objek yang terdeteksi sebagai bangunan dalam model dan terletak pada lokasi yang sama pada data validasi. FP (False Positive) yang juga disebut commission error adalah jumlah objek yang tidak ada dalam data validasi tetapi ada dalam model. Sedangkan FN (False Negative) yang juga disebut omission error adalah jumlah objek dalam data validasi yang tidak ada dalam model.
13
3.9. Analisis Spasial Tiga Dimensi
Analisis spasial merupakan sekumpulan metode untuk menemukan dan menggambarkan tingkatan/ pola dari sebuah fenomena spasial, sehingga dapat dimengerti dengan lebih baik. Dengan melakukan analisis spasial, diharapkan muncul infomasi baru yang dapat digunakan sebagai dasar pengambilan keputusan di bidang yang dikaji. Metode yang digunakan sangat bervariasi, mulai observasi visual sampai ke pemanfaatan matematika/statistik terapan (Sadahiro 2006). Dalam bidang 2D maupun 3D memiliki konsep analisis spasial yang sama. Analisis spasial yang akan dilakukan adalah analisis visibilitas. Analisis visibilitas menampilkan permukaan dan struktur yang terlihat dan disembunyikan dari pengamat, memungkinkan untuk mendapatkan tampilan komprehensif dari scene dan berbagai skenario. Analisis visibilitas dapat dilakukan secara statis dan dinamis, jalan-jalan, dan medan. Semua alat analisis visibilitas adalah objek scene yang disimpan dalam scene yang memungkinkan untuk mengedit detail lapisan, seperti jarak, lokasi, dan simbologi. Analisis visibilitas yang akan dilakukan adalah viewshed, view dome, dan view corridor.
Viewshed menunjukkan visibilitas dari pengamat seperti kamera ke target yang ditentukan. Ini memungkinkan Anda untuk mengidentifikasi objek yang terlihat dan tidak terlihat dalam batas tertentu. Viewshed dapat berguna dalam menilai tampilan dari apartemen yang ada ke situs bangunan baru, mengidentifikasi pandangan ke tempat-tempat menarik, atau mengidentifikasi cakupan kamera untuk tujuan keamanan.
View dome memberi visibilitas 360 derajat dari satu tempat dan dapat bekerja dengan banyak titik untuk menunjukkan cakupan visibilitas yang tumpang tindih.
View corridor dapat digunakan untuk menentukan bangunan yang mengganggu koridor view. View corridor melindungi pandangan yang mapan dari pengamat tertentu terhadap gangguan
14
BAB IV. METODE
4.1. Lokasi Penelitian
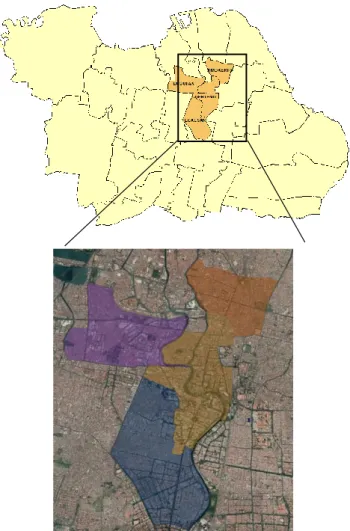
Lokasi penelitian ini dilakukan di UP VI Tunjungan yang terdiri dari Kecamatan Simokerto, Kecamatan Bubutan, Kecamatan Tegalsari dan Kecamatan Genteng. Berikut merupakan gambar dari lokasi pada penelitian ini.
Gambar 10. Lokasi penelitian
4.2. Data dan Peralatan
Data dan peralatan yang digunakan dalam penelitian ini adalah sebagai berikut: 4.2.1 Data
Data yang diperlukan dikategorikan menjadi dua yaitu:
a. Data primer, yaitu data yang didapatkan melalui pengukuran atau survei langsung di lapangan. Data primer yang digunakan dalam penelitian ini adalah sebagai berikut. 1. Data dimensi bangunan yang diakuisisi menggunakan total station.
2. Data koordinat hasil ground truth yang diakuisisi menggunakan GPS handheld dengan ketelitian 3 meter.
3. Data tipe atap hasil ground truth.
b. Data sekunder, yaitu data jadi yang didapatkan dari pihak lain dan tersedia dalam format tertentu. data sekunder yang digunakan dalam penelitian ini adalah sebagai berikut. 1. Data Digital Terrain Model (DTM) dan Digital Surface Model (DSM) Kota Surabaya
15
ini didapatkan dari Dinas Cipta Karya dan Tata Ruang Kota Surabaya. Resolusi spasial DTM adalah 40 cm sedangkan DSM adalah 25 cm.
2. Data foto udara Kota Surabaya yang diakuisisi pada tahun 2016 dalam format *.tif. Data ini didapatkan dari Dinas Cipta Karya dan Tata Ruang Kota Surabaya. Resolusi spasialnya adalah 8 cm.
3. Data jaringan jalan Kota Surabaya dalam format *.shp yang didapatkan dari Dinas Cipta Karya dan Tata Ruang Kota Surabaya dengan skala 1:1000.
4. Data footprint bangunan Kota Surabaya dalam format *.shp yang didapatkan dari Dinas Cipta Karya dan Tata Ruang Kota Surabaya dengan skala 1:1000.
4.2.2. Peralatan
Peralatan yang diperlukan dikategorikan menjadi empat yaitu: a. Peralatan akuisisi data uji ketelitian model tiga dimensi, meliputi:
1. Total station dengan ketelitian 5” yang digunakan untuk mengukur tinggi bangunan 2. Roll meter dengan ketelitian 0.5 mm untuk mengukur jarak
3. GPS handheld dengan ketelitian 3 m mengetahui koordinat objek saat ground truth
b. Peralatan pengolahan data, meliputi: laptop, mouse, perangkat lunak pengolah data tiga dimensi, perangkat lunak pengolah Sistem Informasi Geografis (SIG), perangkat lunak pengolah data statistik, dan perangkat lunak pengolah kata.
4.3 Metode Penelitian
4.3.1. Tahapan Penelitian
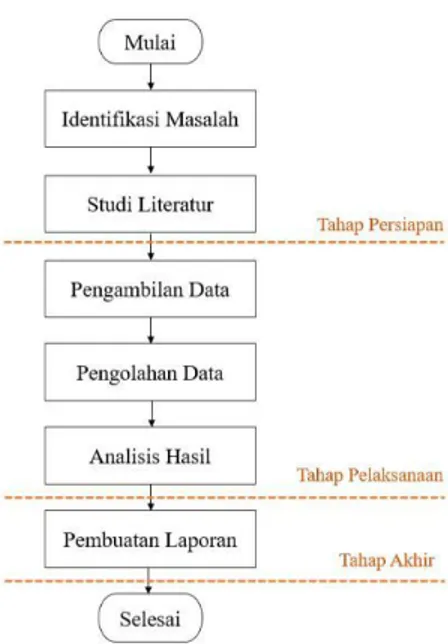
Tahapan penelitian ini secara umum terbagi menjadi tiga, yaitu tahap persiapan, tahap pelaksanaan, dan tahap akhir. Tahap persiapan meliputi identifikasi masalah dan studi literatur. Tahap pelaksanaan meliputi pengambilan data, pengolahan data, dan analisis hasil. Sedangkan tahap akhir meliputi pembuatan laporan. Berikut merupakan gambar dari tahapan penelitian ini.
Gambar 11. Tahapan penelitian
4.3.2. Tahapan Pengolahan Data
16
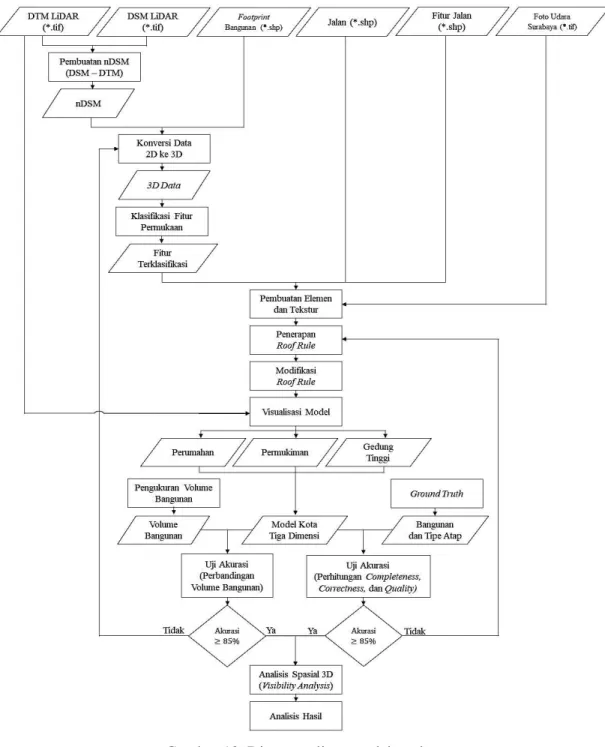
Gambar 12. Diagram alir pengolahan data
Keterangan:
1. Pembuatan nDSM: nDSM merupakan singkatan dari Normalize Digital Surface Model. nDSM menunjukkan ketinggian suatu objek dari DTM atau ground atau tanah, sehingga rumus mencari nDSM adalah DSM – DTM.
2. Konversi data: pada tahap ini dilakukan penambahan informasi ketinggian ke data 2D, untuk membuat transformasi data 2D ke data 3D. Konversi poligon 2D ke poligon 3D melalui tahapan sebagai berikut. Tahap pertaman yaitu mendapatkan data ketinggian dengan metode titik tengah. Tahap kedua yaitu menetapkan ketinggian titik tengah ke poligon 2D. Tahap terakhir yaitu menyelesaikan poligon 2D ke poligon 3D dengan memperoleh atribut elevasi.
17
3. Klasifikasi fitur permukaan: tahap selanjutnya yaitu mengklasifikasikan dan menganalisis fitur permukaan di area studi. Fitur-fitur dengan karakteristik yang mirip dapat dibagi menjadi satu kelas. Setelah mendapatkan hasil klasifikasi, parameter penting yang diperlukan saat pemodelan dikumpulkan dengan cara analisis masing-masing jenis fitur. Bangunan di area studi akan diklasifikasikan menjadi bangunan perumahan (row/planned house), non-perumahan (unplanned house), dan gedung tinggi (high rise building). Setelah diklasifikasikan, selanjutnya adalah menemukan parameter pemodelan bangunan yang meliputi: panjang, lebar, tinggi, bahan konstruksi, gaya fasad bangunan, ukuran pintu dan jendela, gaya atap dan sebagainya.
4. Pembuatan elemen dan tekstur: objek terdiri dari elemen uniknya, seperti pintu, jendela, atap, dan dinding. Tekstur dan elemen adalah representasi eksterior objek pemodelan, yang disimpan sebagai gambar atau file *.obj. Elemen dan tekstur diatur secara terpisah berdasarkan tipe elemen, yang dapat membentuk repositori umum untuk digunakan saat menyandikan aturan. Ada tiga jenis objek di area studi: titik, polyline, dan poligon. Untuk beberapa objek titik, seperti lampu jalan dapat langsung dimodelkan dengan membuat tekstur. Polylines untuk jalan seperti trotoar dapat dimodelkan dengan membuat elemen dan tekstur secara bersamaan. Beberapa objek kompleks seperti bangunan juga dapat dimodelkan dengan membuat elemen dan tekstur bersama sehingga lebih terlihat stereoskopik dan otentik. Elemen utama yang dibuat adalah pintu, jendela, fasad dan atap, dan sebagainya.
5. Penerapan roof rule: pada dasarnya penerapan rule adalah mentransformasikan karakteristik dan sifat suatu objek dari deskripsi visual manusia ke bentuk deskripsi tata bahasa. Aturan umum yang disandikan selama proses pemodelan menggambarkan karakteristik eksternal dan sifat intrinsik masing-masing jenis objek dalam bahasa komputer dan juga menjelaskan operasi yang membuat grafik 2D beralih ke grafis 3D. Semakin umum karakteristik masing-masing jenis objek, semakin teratur, aturan semantik yang lebih sederhana dapat digunakan untuk menggambarkan elemen, bentuk, posisi spasial, dan hubungan. CGA Rule mendefinisikan objek model, seperti bentuk, lokasi spasial, parameter dan elemen sebagai jendela, pintu, ketinggian, ketinggian lantai, tekstur, gaya, dan atribut lainnya dalam file teks.
6. Modifikasi roof rule: pada tahap ini dilakukan modifikasi dari CGA yang telah disediakan oleh perangkat lunak dengan disesuaikan berdasarkan karakteristik area studi. Modifikasi dilakukan dengan mengubah parameter standar serta menambahkan aturan baru dalam file teks CGA sehingga model bisa merepresentasikan dengan baik kondisi lapangan.
7. Visualisasi model: Setelah selesai membuat model, tahap selanjutnya adalah mengekspor kumpulan model 3D yang dihasilkan dengan informasi semantik dan spasial.
8. Uji akurasi: tahap ini terdiri dari dua bagian. Bagian pertama yaitu melakukan uji akurasi terhadap volume bangunan yang dihasilkan model. Bagian ini dimulai dengan pengukuran tinggi dan luas bangunan di lapangan menggunakan peralatan survei, kemudian dibandingkan dengan hasil ukuran model tiga dimensi melalui perhitungan statistik. Sedangkan bagian kedua yaitu melakukan uji akurasi level of detail (LOD) terhadap hasil CGA rule pada bangunan. Bagian ini dimulai dengan ground truth di lapangan dengan mengumpulkan informasi posisi bangunan dan tipe atap, kemudian dilakukan perhitungan correctness, completeness, dan quality untuk mengetahui tingkat akurasi hasil model. Hasil model akan diterima jika memiliki nilai akurasi lebih dari 85 persen. Jika nilai yang dihasilkan kurang, maka akan kembali pada konversi data data dan penerapan CGA-rule.
9. Analisis spasial 3D: tahap ini berfungsi untuk menemukan dan menggambarkan tingkatan atau pola dari sebuah fenomena spasial sehingga dapat dimengerti dengan lebih baik. Dengan melakukan analisis spasial, diharapkan muncul infomasi baru yang dapat digunakan sebagai dasar pengambilan keputusan. Analisis spasial ini akan dilakukan pada model 3D sehingga hasil yang
18
didapatkan bisa dianalisis lebih lanjut. Analisis spasial yang digunakan dibatasi pada analisis visibilitas (visibility analysis) berupa viewshed, vied dome, dan view corridor.
10. Analisis hasil: setelah dilakukan uji akurasi dan analisis spasial, tahap selanjutnya yaitu menganalisis hasil secara keseluruhan berdasarkan perbedaan karakteristik wilayah yang telah diklasifikan pada tahap klasifikasi fitur permukaan (nomor 3). Analisis akan ditinjau dari akurasi tinggi, akurasi LOD, serta analisis spasial (visibility analysis).
11. Pembuatan laporan: membuat laporan sesuai dengan format yang sesuai dengan Panduan Penelitian Dana ITS Tahun 2020 oleh Direktorat Riset dan Pengabdian Kepada Masyarakat.
4.4. Pembagian Tugas dan Luaran Penelitian
Berikut merupakan tugas dari masing-masing anggota dalam penelitian ini. Tabel 2. Pembagian tugas tim peneliti
Nama Keanggotaan Tugas
Hepi Hapsari Handayani, S.T., M.Sc., Ph.D.
Ketua Peneliti - Mengkoordinasikan anggota, melakukan pemodelan 3D city dan analisa akurasi - Menyusun paper jurnal
Nurwatik, S.T., M.Sc. Anggota / Dosen
- Melakukan analisa hasil secara spasial - Menyusun paper jurnal
Fendra Dwi Ramadhan, S.T Anggota/ Mahasiswa S2
- Melakukan pengolahan LiDAR - Melakukan survei lapangan - Seminar internasional
Luaran penelitian ini meliputi:
- Makalah terbit di jurnal internasional terindeks Scopus (Q2), direncanakan untuk journal Transactions in GIS (Impact factor: 2.188), dengan topik : accuracy analysis of 3D city model using semi-automatic method based on semantic rule
- Laporan thesis (mahasiswa S2) dengan topik pemodelan 3D kota menggunakan data LiDAR dan foto udara menggunakan metode semi-otomatis
19
BAB V. JADWAL DAN RANCANGAN ANGGARAN BIAYA
5.1. Jadwal Pelaksanaan
Adapun jadwal pelaksanaan penelitian adalah sebagai berikut:
Tabel 3. Jadwal pelaksanaan penelitian
5.2. Rancangan Anggaran Biaya (RAB)
No Uraian Kegiatan
Volume / Satuan
Biaya (Rp)
1
Persiapan
Pertemuaan awal, penyusunan
rencana kerja
LS
Rp 1.500.000,-
Sub Total
Rp 1.500.000,-
2
Pelaksanaan Penelitian
a. Sewa Total Station
b. Survey
lapangan
validasi
ketinggian bangunan
Rp 500.000/buah/hari x 15
Rp 300.000 /hari x 20
Rp 300.000 /hari x 20
Rp 7.500.000,-
Rp 6.000.000,-
Rp. 6.000.000,-
Tahap Kegiatan Bulan ke-
1 2 3 4 5 6 7 8 9 10 11 12 Persiapan Identifikasi Masalah Studi Literatur Pengumpulan Data Sekunder Pengolah an Data Pengecekan Data Pembuatan nDSM Konversi Data 2D ke 3D Klasifikasi Fitur Permukaan Ekstraksi Parameter Model
Pembuatan Elemen dan Tekstur Penerapan CGA-Rule Visualisasi Model Uji dan Analisis Pengambilan Data Primer Perhitungan Akurasi Tinggi Perhitungan Akurasi LOD Analisis Spasial 3D Tahap Akhir Pembuatan Laporan Akhir Pembuatan Paper
20
c. Survei
lapangan
untuk
footprint bangunan, kanopi
vegetasi, feature jalan
d. Perhitungan
e. Pembuatan geodatabase
f. Analisa hasil
g. Pemodelan 3D city
LS
LS
LS
LS
Rp 5.000.000,-
Rp 3.500.000,-
Rp 5.000.000,-
Rp 5.000.000,-
Sub Total
Rp 38.000.000,-
3
Penyusunan Laporan
a. Kertas
b. Cartridge, tinta
c. Penggandaan Laporan
Rp 30.000/rim x 3
Rp 360.000,00
LS
Rp. 90.000,-
Rp. 360.000,-
Rp. 1.750.000,-
Sub Total
Rp. 2.200.000,-
4
Luaran
a. Jurnal internasional terindeks
scopus (Q2) – proof reading
Rp.5.000.000
Rp. 5.000.000
Sub Total
Rp. 5.000.000
21
BAB VI. DAFTAR PUSTAKA
Al-Hanbali Nedal, Fedda Iyad, Awamleh Bashaar, dan Dergham Mohannad. 2006. Building 3D
GIS Model of a University Campus for Planning Purposes: Methodology and
Implementation aspects. Map Middle East. March 26-29.
Arefi, H. Engels, J. Hahn, M. Mayer, H. 2008. Levels of Detail in 3D building Reconstruction from
LiDAR data. International Archive of Photogrammetry, Remote Sensing, and Spaial.
Information 37, 485–490.
Atmaja, A.A., Prasetyo, Y., Haniah, H.. 2016. Deteksi Objek Berbahaya dan Pemodelan 3D
Jaringan Kelistrikan Menggunakan Teknologi LiDAR (Studi kasus: Koridor jaringan
kelistrikan di Kabupaten Gowa, Sulawesi Selatan, Indonesia). Jurnal Geodesi Undip
5:57-67.
Batara, Yastin David. 2012. Pembuatan Model Tiga Dimensi (3D) Sistem Informasi Geografis
(SIG) untuk Visualisasi Wilayah Kota. Jurnal POROS TEKNIK 4: 14-18.
Biljecki,
F. 2017. Level of detail in 3D city models. PhD thesis, TU Delf, 353
pp.doi:10.4233/uuid:f12931b7-5113-47ef-bfd4-688aae3be248.
Carter, W.,Shrestha, R., Tuell, G., Bloomquist D., Sartori, M. 2001. Airborne Laser Swath
Mapping Shines New Light on Earth’s Topography. EOS 82 (46): 549–64.
Esri. 2012.
Storing Lidar Data. 2012.
https://pro.arcgis.com/en/pro-app/help/data/las-dataset/storing-lidar-data.htm.
Esri. 2015. What is Lidar Data?. 2015.
https://pro.arcgis.com/en/pro-app/help/data/las-dataset/what-is-lidar-.htm.
Featherstoe, W., Khun, M. 2010. Height systems and vertical datums: A review in the Australian
context. Curtin University.
Flamanc D., Maillet G., Jibrini H. 2003. 3-D City models: an operational approach using aerial
images and cadastral maps. ISPRS Archives Vol. XXXIV Part 3/W8. Munich. 17.-19.Sept.
Habibullah, Farda, N.M., 2014. Ekstraksi Tinggi Bangunan dengan Menggunakan Foto Udara
Ortho dan Data LiDAR. Jurnal Bumi Indonesia (3):2.
Hu, Xiaoxia, Xuefeng Liu, Zhenming He, Jiahua, Zhang. 2013. Batch Modeling Of 3D City Based
on Esri CityEngine. International Communications Satellite Systems Conference in
Shanghai, China.
Huang Xiaojing, Kwoh Leong Keong. 2008. Monoplotting- A semi-automated approach for 3-D
reconstruction from single satellite image. The International Archives of the
Photogrammetry, Remote Sensing and Spatial Information Sciences. Vol. XXXVI. Part B3b.
Beijing.
Jaboyedoff, M., Oppikofer, T., Abell´an, A., Derron, M.-H., Loye, A., Metzger, R. and Pedrazzini,
A., 2010. Use of LiDAR in Landslide Investigations: a Review. Natural Hazards 61(1), pp.
528.
Juniastuti, S, Hariadi M, Reza, F.R. 2008. View-Dependent Level Of Detail (LOD) Untuk
Penggambaran Terrain. Seminar on Intelligent Technology and Its Applications. Surabaya.
Kennie, T.J., dan Petrie, G. 1990. Engineering Survey Technology. Blackie, Glasgow. Parish, Yoav
I H, Pascal Muller. 2001. Procedural Modeling of Cities. Zurich: ETH Zurich. Petrie,
Gordon, dan Charles K. Toth. 2009. Introduction to Laser Ranging,
Profiling, and Scanning. In Topographic Laser Ranging and Scanning: Principles
and Processing, diedit oleh Jie Shan dan Charles K. Toth, 1:1–27. Boca Raston,
Florida: CRC Press. https://doi.org/10.1201/9781420051438.ch1.
Prahasta, Eddy. 2015. Pengolahan Data Sistem LiDAR. Bandung: Informatika.
Schueren,
M. 2017. New Visibility Analysis Tools in CityEngine 2017.1.
https://www.esri.com/arcgis-blog/products/3d-gis/3d-gis/new-visibility-analysis-tools-in-cityengine-2017-1/
22
Singh, S.P. 2013. Applications of Virtual 3D City Models. International Archives of the
Photogrammetry, Remote Sensing and Spatial Information Sciences,. Volume XL-2/W2,
ISPRS 8th 3DGeoInfo Conference & WG II/2 Workshop
Tian, Y. Gerke, M. Vosselman, G. Zhu, Q. 2010. Knowledge-based building reconstruction from
terrestrial video sequences. ISPRS J. Photogramm. Remote Sens. 65: 395–408.
Turksever, Said. 2015. 3D Modeling with City Engine.Turki: Istanbul Technical
University. DOI: 10.13140/RG.2.2.30548.30085
Ulhaq, D.N., Soeksmantono, B., Wikantika, K. 2017. Pemetaan Bangunan Tiga Dimensi Untuk
Pemodelan Jalur Evakuasi Darurat. Bandung: Institut Teknologi Bandung.
Zheng, Yuanfan, Qihao Weng, dan Yaoxing Zheng. 2017. A Hybrid Approach for
Three-Dimensional Building Reconstruction in Indianapolis from LiDAR Data. Remote Sensing
Journal 9: 310.
23
BAB VII. LAMPIRAN
Lampiran 1. Biodata peneliti
1. Ketua Tim A. Identitas Diri
1 Nama Lengkap (dengan gelar) Hepi Hapsari Handayani, ST, MSc, PhD
2 Jenis Kelamin P
3 NIP/NIK/Identitas lainnya 1978 1212 2005 01 2001
4 NIDN (jika ada) 0012127802
5 Tempat dan Tanggal Lahir Purworejo, 12 Desember 1978
6 E-mail [email protected]
7 Nomor Telepon/HP 081217418612
8 Nama Institusi Tempat Kerja Departemen Teknik Geomatika 9 Alamat Kantor Kampus ITS Sukolilo, Surabaya 10 Nomor Telepon/Faks (031) 5929487 / 5929486
B. Pengalaman Penelitian Yang Relevan
No. Tahun Judul Penelitian Pendanaan
Sumber* Jml (Juta Rp)
1 2015 Anggota
3D Modelling dan Visualisasi Bangunan Cagar Budaya (Culture Heritage) dalam Rangka Pengembangan Kawasan Wisata Kota Tua Terpadu Surabaya(Studi Kasus:Gedung Kantor Gubernur Jawa Timur)
Penelitian Dasar Sumber Dana Lain-Dalam Negeri 25 2 2017-2019 Anggota Pengusul
Analisa Estimasi Produktivitas Padi Dengan Citra Landsat 8 Berdasarkan Fase Tumbuh, Pengamatan In-Situ Dan Model Peramalan Autoregresif Integrated Moving Average (ARIMA) (Studi Kasus: Kabupaten Bojonegoro)
PDUPT DIKTI 78.7 3 2017 – 2018 (research assistant)
Transformation of Urban volume and ecosystem services in the mega-cities of Southeast Asia
The Japan Society for the Promotion of Science (JSPS) 439,4 4 2018-2019 (research assistant)
Urban Heat Island Effect in Rapidly Growing Megacities in Developing Countries
Grant-in-Aid for Scientific Research (B) - Japan 520 5 2019 (anggota)
Penilaian Variasi Spasial Temporal Pm2.5 Untuk Menganalisis Perbandingan Tingkat Polusi Udara Di Indonesia Dan Taiwan
Dana Lokal ITS
24
C. Publikasi Yang Relevan
Judul Penulis Nama Jurnal
Validating ALOS PRISM DSM-derived surface feature height: Implications for urban volume estimation
Ronald C. ESTOQUE, Yuji MURAYAMA, Manjula RANAGALAGE, Hao HOU, Shyamantha SUBASINGH, Hao GONG, Matamyo SIMWANDA,
Hepi H. HANDAYANI, Xinmin
ZHAN
Tsukuba
Geoenvironment Science, Vol 13, 2017
Estimation of built-up and green volume using geospatial techniques: A case study of Surabaya, Indonesia
Hepi H. Handayani, RC Estoque, Y
Murayama
Sustainable Cities and Society Vol. 37 (February), 2018 Relation between Urban Volume and
Land Surface Temperature: A Comparative Study of Planned and Traditional Cities in Japan
M Ranagalage, RC Estoque, Hepi H.
Handayani, X Zhang, T Morimoto,
Y Murayama
Sustainability 10 (7), 1-17
Geospatial Analysis of Horizontal and Vertical Urban Expansion Using Multi-Spatial Resolution Data: A Case Study of Surabaya, Indonesia
Hepi H. Handayani, Y Murayama,
M Ranagalage, F Liu, D Dissanayake
Remote Sensing 10 (10), 1599, 2018 Impact of Urban Surface
Characteristics and Socio-Economic Variables on the Spatial Variation of Land Surface Temperature in Lagos City, Nigeria
D Dissanayake, T Morimoto, Y Murayama, M Ranagalage, Hepi H.
Handayani
Sustainability 11 (1), 25, 2019
Studi Perbandingan Total Station dan Terrestrial Laser Scanner dalam Penentuan Volume Obyek Beraturan dan Tidak Beraturan
RF Maulidin, HH Handayani, YH Perkasa
Jurnal Teknik ITS 5 (2), A723-A727, 2016 3D Visualization Of Cultural Heritage
Using Terrestrial Laser Scanner (A Case Study: Monument Of Heroes, Surabaya, East Java)
CB Pribadi, Hepi H Handayani, FE Rachmawan
Geoid 11 (2), 184-189, 2016
Analisa Data Foto Udara untuk DEM dengan Metode TIN, IDW, dan
Kriging J Arfaini, Hepi H Handayani
Jurnal Teknik ITS 5 (2), 2016
Visualisasi 3D Objek Menggunakan
Teknik Fotogrametri Jarak Dekat SJ Harahap, Hepi H Handayani
Jurnal Teknik ITS 5 (2), 2016
25 Studi Klasifikasi Berbasis Objek Untuk
Kesesuaian Tutupan Lahan Tambak, Konservasi Dan Permukiman Kawasan Pesisir (Studi Kasus: Kec. Asemrowo, Krembangan, Pabean Cantikan
IJ Kusuma, HH Handayani
Geoid 10 (2), 163-170, 2015
D. Bimbingan Tugas Akhir Yang Relevan
Judul Jenis Penelitian
Studi fotogrametri jarak dekat dalam pemodelan 3D dan
analisis volume objek.
Tugas Akhir.
Analisa data foto udara untuk dem dengan metode TIN,
IDW, dan Kriging,
Tugas Akhir
Visualisasi 3D objek menggunakan teknik fotogrametri
jarak dekat
Tugas Akhir
Studi Klasifikasi Berbasis Objek Untuk Kesesuaian
Tutupan Lahan Tambak, Konservasi Dan Permukiman
Kawasan Pesisir
Thesis
2. Anggota Tim A. Identitas Diri
Nama lengkap
: Husnul Hidayat, ST MT
NIP
: 199008072015041001
Tempat/Tanggal Lahir
: Sumbawa, 07 Agustus 1990
Jenis Kelamin
: Laki-laki
Bidang Keahlian
: Geospasial, fotogrametri, penginderaan jauh
Kantor/Unit Kerja
: Departemen Teknik Geomatika, ITS Surabaya
Alamat Kantor
: Kampus ITS Sukolilo, Surabaya
Alamat Rumah
: Jl. T. Komputer Blok G-9 Kampus ITS Sukolilo
: [email protected]
No. Telepon Genggam
: 081238124324
B. Pengalaman Penelitian / Pengabdian Yang Relevan
C. Publikasi Yang Relevan
No.
Karya Ilmiah
1.
Hidayat, H., Cahyono, A. B., (2015), 3D Reconstruction of Singosari Temple
Using Terrestrial Images and Structure from Motion Algorithm, The 1
stInternational Conference of Indonesian Society for Remote Sensing
(ICOIRS) 2015, 27-28
thOctober 2015, Surabaya.
2.
Hidayat, H., Cahyono, A. B., (2016), Rekonstruksi Digital Bangunan Candi
Singosari dengan Metode Structure from Motion, Jurnal GEOID Vol. 11 No.
2 Februari 2016.
3.
Hidayat, H., Cahyono, A. B., (2016), Combined aerial and terrestrial images
for complete 3D documentation of Singosari Temple based on Structure from
26