Bab II Dasar Teori_______________________________________________________________
BAB II
DASAR TEORI
II.1. Pendahuluan
Pada bab ini pertama-tama akan dijelaskan secara singkat apa yang dimaksud dengan target tracking dalam sistem Radar. Di dalam sebuah sistem Radar ada beberapa proses yang dilakukan untuk dapat melakukan tracking terhadap suatu target. Hasil dari proses-proses tersebut adalah data track target yang merupakan data lintasan sebuah target yang tertangkap oleh sistem Radar. Akan tetapi, di dalam tesis ini proses-proses teknis sistem Radar, yang sebenarnya adalah bagian dari proses pengolahan sinyal elektronik, tidak akan dijelaskan secara lengkap karena masalah yang ingin dibahas bukan mengenai peralatan elektronik dari sistem Radar tersebut melainkan mengenai masalah estimasi dan pengolahan data track.
Selanjutnya akan diberikan gambaran bagaimana metode estimasi dilakukan dalam proses target tracking dari sistem Radar. Di dalam sub bab ini penjelasan mengenai proses estimasi dengan persamaan gerak yang lazim digunakan oleh sistem Radar akan diterangkan secara singkat. Kemudian dasar teori Filter Kalman juga diterangkan secara sederhana dan singkat agar mudah dimengerti dan langsung dapat digunakan. Penjelasan Metode Estimasi dan Penurunan algoritma Filter Kalman yang lengkap disajikan pada bagian Lampiran.
Bagian terakhir dari bab ini akan diisi dengan dasar teori dari metode penggabungan track yang digunakan di dalam sistem Multi Radar Tracking yang akan didesain. Beberapa arsitektur penggabungan data akan diberikan beserta penjelasan bagaimana memakainya.
Bab II Dasar Teori_______________________________________________________________
II.2. Radar Target Tracking
Radar target tracking saat ini sangat penting kegunaannya di berbagai bidang penerbangan seperti sistem navigasi, pengawasan lalu-lintas udara, dan tracking suatu obyek. Menurut definisi, tracking adalah suatu usaha untuk mengetahui keadaan (pada umumnya posisi dan kecepatan) suatu target yang telah ditentukan dan keadaan target itu selanjutnya berdasarkan data yang diterima dalam suatu sistem koordinat tertentu.[5]
Tujuan utama dari sebuah Radar adalah untuk mengetahui dan bila mungkin memprediksi posisi dan kecepatan dari sebuah target dan menggunakan data tersebut untuk sistem penghindaran tabrakan dan untuk menyediakan data yang berguna sebagai instruksi untuk mengarahkan target tersebut. Akan tetapi, pengukuran Radar bersifat mengandung noise dan tidak menyediakan estimasi kecepatan target. Sebuah tehnik komputasi untuk mengurangi noise yang terjadi dan menyediakan data estimasi kecepatan diperlukan untuk mencapai tujuan dari sebuah sistem Radar.
Sistem Radar mengeluarkan hasil pengukuran dalam tata acuan koordinat polar yaitu berupa r (range) dan θ (theta), dimana r adalah jarak antara Radar dengan target tersebut sedangkan θ adalah sudut antara target dengan True
Bab II Dasar Teori_______________________________________________________________ North
Ó
(r, θ) θ r East Gambar II.1 : Tata Acuan Koordinat sistem RadarSebelum target yang ditangkap oleh Radar ditampilkan menjadi sebuah track, ada beberapa proses yang harus dilalui terlebih dahulu. Hal ini dijelaskan pada Gambar II.2 di bawah .
Radar Head
Bab II Dasar Teori_______________________________________________________________
Radar Head yang merupakan bagian dari sistem Receiver Radar menangkap pantulan sinyal dari sebuah obyek atau target yang memantulkan sinyal dari sistem Radar sebelumnya. Pada sistem ATC harus diketahui mana pantulan sinyal yang dimiliki oleh suatu pesawat udara dan mana yang bukan, jika tidak maka akan timbul resiko tabrakan. Bila dilihat pada Gambar II.2, proses ini dilakukan pada bagian Extractor, yang memilah-milah data mentah (raw data) hasil tangkapan Radar Head. Hasil dari proses tersebut adalah data radar yang berupa Plot. Dari plot-plot inilah kemudian proses tracking dilakukan oleh sistem Tracker dengan menghitung posisi dan kecepatan plot yang dihasilkan sehingga menjadi data radar Track yang dapat dilihat pada sistem tampilan dan dipergunakan oleh operator Lalu Lintas Udara untuk mengatur lalu lintas udara di wilayahnya masing-masing [1], [2].
Suatu sistem Radar biasanya menerima sinyal dari sebuah target (dalam hal ini adalah pesawat udara) setiap 4 sampai 10 detik tergantung berapa lama putaran atau revolusi antenna radar untuk melakukan satu putaran [1]. Oleh karena kecepatan dan kemungkinan manuver yang dilakukan oleh target maka timbul suatu ketidakpastian dimana posisi berikutnya dari target tersebut. Metode estimasi statistiklah yang digunakan untuk meng-estimasi posisi berikutnya dari pesawat udara.
Jadi pengertian proses target tracking pada dunia modern sekarang ini adalah suatu proses untuk mengestimasi keadaan target pada saat ini (misal pada waktu t1) dan berikutnya (waktu t2) sebaik dan sedapat mungkin dengan
memodelkan keadaan di dunia nyata.
Sedangkan pada aplikasi di bidang militer, target tracking dibutuhkan untuk mengestimasi bukan hanya posisi dimana sebuah benda akan mendarat tetapi juga dari mana asal benda tersebut diluncurkan. Para penyusun taktik militer juga tertarik pada lintasan pesawat udara yang terbang untuk mendapatkan peringatan dini bila terjadi serangan ke daerah mereka. [1]
Bab II Dasar Teori_______________________________________________________________
II.3. Proses Estimasi Keadaan Dinamik dan Tracking
Proses estimasi dan filtering sangat penting peranannya dalam dunia navigasi dan tracking. Secara definisi, estimasi adalah sebuah proses untuk memprediksi nilai dari beberapa parameter yang diteliti berdasarkan pada hasil pengamatan yang tidak akurat, tidak pasti, atau tidak langsung. Sedangkan
filtering adalah estimasi dari keadaan (saat ini) sebuah sistem dinamik. Kata
”filter” digunakan karena tujuan proses itu adalah untuk mendapatkan hasil estimasi terbaik berdasarkan sejumlah data yang mempunyai noise untuk mem-filter (meminimalkan) noise tersebut. [7]
Penggunaan proses estimasi dan filtering dapat ditemukan pada banyak bidang penelitian antara lain yang berhubungan dengan hal-hal di bawah ini [7]:
• Penentuan parameter atau karakteristik dari sebuah sinyal atau gambar Æ signal/image processing
• Penentuan parameter model untuk memprediksi keadaan dari sistem fisik atau perkiraan ekonomi atau variabel yang lain Æ system
identification
• Penentuan parameter orbit planet dan wahana antariksa
• Penentuan posisi dan kecepatan dari sebuah pesawat udara pada sistem Pengawasan Lalu-lintas Udara Æ tracking
Sebuah alat estimasi (estimator) yang optimal adalah sebuah algoritma komputasional yang memproses hasil pengamatan (pengukuran) untuk menghasilkan estimasi dari variabel yang diteliti dengan mengoptimalkan beberapa kriteria tertentu. Keuntungan dari estimator yang optimal adalah bahwa estimator itu dapat membuat penggunaan akan data yang ada dan pengetahuan akan sistem serta gangguannya dengan cara yang paling baik. Akan tetapi kerugiannya, seperti teknik optimal lainnya, adalah adanya
Bab II Dasar Teori_______________________________________________________________
kemungkinan bila semakin sensitif pemodelan sistem dan kesalahannya maka proses komputasinya akan semakin rumit sehingga membuat biaya komputasinya semakin mahal. [7]
Sedangkan secara umum perkembangan dari filter tracking di dunia dapat diurutkan sebagai berikut :
1) 1970 an Æ α - β tracking filters, sebuah metode tracking sederhana untuk meng-estimasi keadaan selanjutnya dengan memberikan suatu konstanta yang berfungsi sebagai faktor pengali.
2) 1980 an Æ (Adaptive) Kalman filters, sebuah metode yang pada dasarnya merupakan penggabungan metode Least Square dengan model dinamik sebuah sistem. Pada sistem gerak linier yang ber-noise, filter ini bekerja optimal dalam hal tracking.
3) 1990 an Æ Advanced (and computational demanding) algorithms. Algoritma filtering yang lebih kompleks, dikembangkan untuk mengatasi masalah yang disebabkan oleh gerak manuver target (contoh : IMM,
Interactive Multiple Model) dan masalah komputasi banyak target.
(contoh : JPDA, Joint Probabilistic Data Association).
4) 2000 – sekarang Æ Non-linear filtering algorithm. Algoritma ini menggunakan banyak sekali filter untuk meng-estimasi sebuah track. Contoh : Particle filters dan unscented Kalman filters.
Dua metode terakhir yang disebutkan di atas (nomor 3 dan 4) sebenarnya dapat menunjukkan performance yang lebih baik dari metode Filter Kalman biasa, tetapi metode-metode tersebut pada umumnya belum diimplementasikan pada sistem Radar Tracking yang ada. Alasannya adalah metode Filter Kalman beroperasi cukup baik pada hampir semua kasus dari aplikasi yang mempergunakannya dan seperti telah dijelaskan di atas bahwa semakin baik teknik yang digunakan, maka modelnya akan semakin sensitif dan rumit sehingga menyebabkan naiknya biaya komputasi.
Bab II Dasar Teori_______________________________________________________________
Banyak masalah di dalam bidang ilmiah memerlukan estimasi keadaan dari sebuah sistem yang berubah sesuai dengan waktu dengan menggunakan beberapa rentetan pengukuran ber-noise yang disebabkan oleh sistem tersebut. Sebuah sistem tracking target mengumpulkan data sensor yang berisi satu atau lebih target potensial dan memilah-milah data sensor itu ke dalam satu kelompok pengamatan, yang disebut track, yang dihasilkan oleh target tersebut. Tujuan dari tracking target adalah untuk meng-estimasi keadaan lalu dan sekarang dari sebuah sistem dinamik sedemikian rupa sehingga dapat mem-prediksi keadaan yang akan datang.
Proses Estimasi dilakukan berdasarkan :
• Perubahan (evolusi) dari variabel-variabel nya (Dinamika Sistem) • Sensor (Sistem Pengukuran)
• Karakter Probabilitas dari beberapa faktor acak dan informasi sebelumnya.
Istilah ”observasi” lebih sering digunakan daripada ”pengukuran”. Observasi adalah sebuah istilah kolektif yang digunakan untuk mewakili semua kuantitas pengamatan atau pengukuran dari sebuah keluaran deteksi dari sebuah sensor. Dalam hal tracking target radar, permasalahan yang ada bukan hanya mengenai ketidak-akuratan dari pengukuran yang dimodelkan sebagai noise tambahan, akan tetapi juga mengenai ketidakpastian tambahan yang disebabkan oleh ketidakpastian asal pengukuran dan asosiasi yang tidak benar dari pengukuran ke target.
Masalah Estimasi dasar dapat dibaca di bagian Lampiran A yang menjelaskan masalah estimasi parameter acak dan tidak acak beserta beberapa metode estimasi yang sering digunakan.
Gambar II.3 menunjukkan sebuah blok diagram ringkas yang menggambarkan sebuah proses estimasi keadaan. Pada gambar tersebut, blok pertama
Bab II Dasar Teori_______________________________________________________________
(”Dinamic System”) dan blok kedua (”Measurement System”) dianggap
sebagai ”black boxes” (dimana kita tidak dapat berbuat apa-apa terhadap variabel didalamnya). State Estimate System State Dynamic System ( )t f{x( ) ( )t ,ut t,} ( )wt x& = + Measurement System ( )t h{x( ) ( )t,ut t,} ( )vt z = + Measurement System error source
( )
t w Measurement error source( )
t v Prior Information State Estimator ( )t Φx(t) Γu( )t x +1 = + State Uncertainties ( )t GGambar II.3 : Proses Estimasi keadaan
Satu-satunya variabel yang dapat diakses oleh alat estimasi adalah
”measurement”, yang dipengaruhi oleh sumber kesalahan dalam bentuk ”measurement noise” . Pada sub bab berikut akan dijelaskan model-model
matematik yang digambarkan oleh Gambar II.3 di atas.
II.3.1. Model Matematika Sistem Dinamik
Secara matematik, permasalahan target tracking dapat dimodelkan sebagai berikut. Ada dua macam model yang biasa digunakan dalam hal tracking yaitu: model transisi keadaan dan model pengukuran.
Bab II Dasar Teori_______________________________________________________________
Model sistem dinamik (blok ”Dinamic System” pada Gambar II.3) dapat djelaskan secara umum di dalam notasi state space sebagai sebuah persamaan diferensial vektor non linier orde satu dalam bentuk :
( )
t f{
x( ) ( )
t ,u t t,} ( )
w tx& = +
( )
t ∈Rnx
( )
t ∈Rr(2.1)
dimana adalah keadaan dari yang bersangkutan pada saat t, u adalah input kontrol yang diketahui,
{ }
⋅ ⋅ ⋅,,Rr
n ×
f adalah fungsi transfer dari persamaan keadaan dan input kontrol dalam waktu t (dari R × R ke ) dan adalah sebuah vektor acak yang menggambarkan noise dinamik dan ketidakpastian di dalam model keadaan itu sendiri (variabel ”system error source” pada Gambar II.3). Model transisi keadaan linier nya dalam waktu kontinu dapat dituliskan sebagai berikut :
n R w
( )
( ) ( ) ( )
( )
t( )
t( ) ( )
t t t t t t F x B u G w x& = + + (2.2)Jika dimodelkan secara diskrit dalam waktu k , persamaan (2.2) di atas menjadi :
( )
k (k) ) k ( ) k ( ) k ( ) k ( ) k ( F x B u G w x +1 = + +( )
x,y (2.3)Selanjutnya dimodelkan sebuah sistem yang menggunakan posisi target dan kemungkinan kecepatan
(
V ,x Vy)
t
(
x,k)
k k x V t x ⎥ ⎤ ⎢ ⎡ + ⋅ ⎥ ⎤ ⎢ ⎡ +1 Δsebagai vektor keadaan. Waktu sample diskrit nya adalah Δ . Sehingga model transisi keadaan nya untuk tipe kecepatan konstan adalah :
(
)
k k , y k , y k k , x k , y k k , x V t V y V V y V w + ⎥ ⎥ ⎥ ⎥ ⎦ ⎢ ⎢ ⎢ ⎢ ⎣ ⋅ + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎢ ⎢ ⎢ ⎢ ⎣ + + + Δ 1 1 1 (2.4)Bab II Dasar Teori_______________________________________________________________
Dengan asumsi obyek atau target yang dimaksud bergerak dengan kecepatan konstan dan mempunyai noise w . k
Model Observasi atau Model Pengukuran
Model observasi lebih didasarkan pada bentuk geometri atau bentuk fisik daripada pengandaian. Kadang-kadang model ini juga disebut sebagai Model Sensor. Seperti model transisi keadaan di atas, Model observasi atau pengukuran keadaan (blok ”Measurement System” pada Gambar II.3) dimodelkan dalam notasi state-space oleh fungsi vektor non linier sebagai berikut
( )
t h{
x( ) ( )
t ,ut t,} ( )
v t z = +( )
t ∈Rm z{ }
⋅ ,,⋅⋅ R Rr n (2.5)Dimana adalah observasi yang dilakukan pda waktu t, fungsi h adalah fungsi transfer dari persamaan keadaan dan input kontrol dalam waktu t ke dalam persamaan observasi (dari R × × ke ) dan v adalah sebuah vektor acak yang menggambarkan noise pengukuran dinamik dan ketidakpastian di dalam model pengukuran itu sendiri (variabel ”measurement error source” pada Gambar II.3).
m
R
( )
t( )
( ) ( ) ( )
Model transisi keadaan linier nya dalam waktu kontinu dapat dituliskan sebagai berikut :
( )
t t t t t H x D v z = + (2.6)Menurut cara konvensional, ketergantungan dari input kontrol tidak eksplisit diperlukan di dalam sebuah model observasi, sehingga keberadaannya diabaikan kecuali bila diperlukan. Dalam model waktu diskrit persamaan (2.6) menjadi :
Bab II Dasar Teori_______________________________________________________________
( )
k H( ) ( ) ( )
k xk vkz = +
1954. Kalman meneruskan studinya di Columbia University and mendapat (2.7)
Bila persamaan-persamaan model waktu diskrit (2.3) dan (2.7) digambarkan pada proses estimasi keadaan, maka gambar II.3 menjadi :
State Estimate System State Dynamic System ( )k (k) ) k ( ) k ( ) k ( ) k ( ) k ( F x B u G w x +1 = + + Measurement System ( ) ( ) ( ) ( )k Hkxk vk z = + Measurement System error source
( )
k w Measurement error source( )
k v Prior Information State Estimator (k ) Φx(k) Γu( )k x +1 = + State Uncertainties( )
k GGambar II.4 : Proses Estimasi Keadaan waktu diskrit
II.3.2. Filter Tracking Kalman
Rudolph E. Kalman adalah orang yang berjasa dalam pengembangan metode ini. Beliau membantu mengintegrasikan penggunaan sistem komputer digital untuk menciptakan algoritma yang secara umum ditekankan pada matematika. Algoritma Kalman adalah satu dari teknik yang paling banyak dipakai dalam teori kontrol modern, yang ada pada banyak masalah dari masalah Radar target tracking wahana udara hingga navigasi dan kontrol wahana antariksa.
Kalman dilahirkan di Budapest, Hungary pada tanggal 19 Mei 1930. Beliau menerima pendidikan di Massachusetts Institute of Technology dan mengambil jurusan utama di Electrical Engineering. Pada tahun 1953, beliau menerima gelar Bachelor nya dan kemudian gelar Master nya pada tahun
Bab II Dasar Teori_______________________________________________________________
gelar Doctorate nya pada tahun 1957. Pada tahun 1958, dia memulai penelitian nya tentang teori kontrol di Research Institute for Advanced Study (RIAS), Baltimore. Disitu, Kalman menyatukan pekerjaan awal sebelumnya dalam masalah filtering yang dikerjakan oleh Wiener, Kolmogorov, Bode, Shannon, Pugachev dan yang lainnya dengan idenya sendiri untuk menciptakan sebuah Filter Kalman versi “continuous-time” (waktu berjalan). Versi ini diciptakan berkolaborasi dengan partner kerjanya yaitu R.S. Bucy [4].
Filter Kalman pertama kali digunakan oleh NASA pada sistem navigasi
Filter Kalman pada dasarnya adalah sebuah set persamaan matematika yang
Gambar II.5 : Siklus Filter Kalman Diskrit
Update waktu memproyeksikan estimasi keadaan saat ini lebih dulu dalam waktu. Update pengukuran memperbaiki estimasi yang telah diproyeksikan pesawat Apollo dan setelah itu terus digunakan oleh banyak penelitian dan bidang teknologi. Salah satu penggunaan yang paling inovatif adalah aplikasi pada target tracking modern untuk mencegah kemungkinan tabrakan dan juga untuk memperoleh informasi pada ancaman serangan dari udara. Penggunaan nya diperluas seiring dengan perkembangan kapabilitas komputer dan telah menjadi suatu bagian yang penting dari modern tracking.
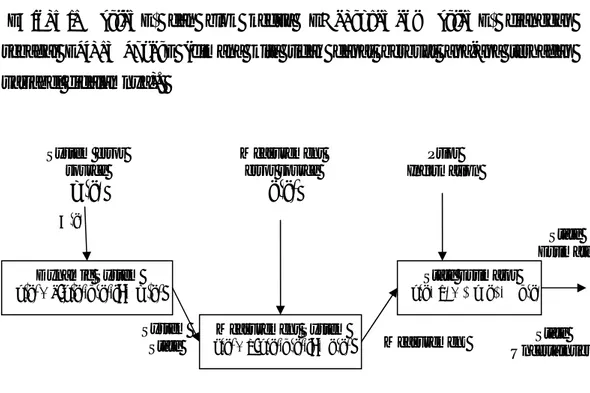
mengimplementasikan alat estimasi prediksi-koreksi seperti digambarkan pada Gambar II.5 berikut.
Time Update (Predictor)
Measurement Update (Corrector)
Bab II Dasar Teori_______________________________________________________________
Persamaan waktu update dapat dianggap sebagai persamaan prediksi, sedangkan persamaan pengukuran update dianggap sebagai persamaan koreksi. Filter Kalman menjadi optimal dalam arti bahwa algoritmanya meminimalisasi kovarian error estimasi di bawah asumsi-asumsi:
aan dengan tambahan noise pengukuran yang zero-mean dan white.
• sikan sebagai variabel acak dengan nilai
•
II.3.2.1. Filter Kalman dan Matriks-matriksnya yang berpengaruh
odel transisi keadaan yang mendeskripsikan evolusi dari sebuah vektor keadaan selama waktu tertentu diberikan oleh persamaan [13]:
xk =Fkxk−1+Bkuk +Gkwk (2.8)
1 −
k k r
input, adalah noise gerak tambahan, B adalah ma ansisi input,
k
G matriks transisi noise, Fkadalah matriks transisi keadaan dan xk
vektor keadaan pada taha u k berikutnya. Lebih lanjut, persam • Evolusi sistem keadaannya berdasarkan persamaan transisi keadaan
linier yang diketahui.
• Model observasinya adalah fungsi linier dari kead
Keadaan awalnya diasum
tangah dan kovarian yang diketahui. Noise nya tidak berkorelasi satu sama lain.
Misalkan sebuah m
dimana x adalah vektor keadaan pada tahap waktu k-1, u adalah vekto
k
w k triks tr
adalah
adalah p wakt aan
ini diikuti oleh sebuah model observasi yang menjelaskan bagaimana pengukuran dihubungkan dengan model keadaannya.
k k k
k H x v
Bab II Dasar Teori_______________________________________________________________
dimana zk adalah pengukuran yang didapat pada tahap waktu k, xkadalah vektor keadaan pada tahap waktu k, Hk adalah matriks m n
k
v adalah noise observasi tambahan.
Semua noise vk dan wk diasumsikan Gaussian, tidak berkorelasi secara odel observasi da
temporal dan zero-mean.
[ ] [ ]
k =E k =0Ev w ∀k (2.10)
dengan kovarian yang berkaitan
[
]
ij i T j i Ew w =δ Q (2.11) dan[ ]
ij i T j i Ev v =δ R (2.12)Noise proses dan observasi juga diasumsikan tidak berkorelasi yang berarti
bahwa
[
i Tj]
=0Ew v
dan least-square berdasarkan rangkaian hasil pengukuran. Filter Kalman meng-estimasi sebuah keadaan pada saat tahap waktu tertentu dan
emudian memperoleh fee
oleh noise. Seperti telah digambarkan pada Gambar II.5, algoritmanya terdiri dari dua tahap, yaitu : prediksi dan koreksi.[5]
j i,
∀ (2.13)
Masalah estimasi stokastik adalah menemukan estimasi keadaan yang paling optimal
Bab II Dasar Teori_______________________________________________________________
1) Prediksi (Time Update)
k k k k k ˆ ˆx −1=Fx −1 −1 +Bu (2.14) T T k k k k FP F GQG P −1= −1 −1 + (2.15)
Dimana ˆxkk−1 yang diberikan pada persamaan (2.14) adalah vektor keadaan a
priori dan k−1 adalah ko s a priori pada waktu k
k-1. edan F
dihasilkan dari rumus :
varian estima i error
S gkan matriks transisi keadaan
k
P
berdasarkan data pada waktu
( ) ( )
[
]
x u x f ∂ ∂ t , t .Demikian juga dengan matriks transisi input dan matriks transisi noise [13]:
( ) ( )
F= (2.16)
dimana f
[
x( ) ( )
t u, t]
adalah persamaan gerak yang telah ditentukan sebelumnya[
]
u u x f ∂ ∂ = t , t( ) ( )
B (2.17)[
]
w ∂ u x f G=∂ t , t (2.18)( ) ( )
[
]
x H ∂ = ∂hx t ,ut (2.19)dimanah
[
x( ) ( )
t u, t]
adalah persamaan yang menghubungkan hasil pengukuran2) Koreksi (Measurement Update)
k
Bab II Dasar Teori_______________________________________________________________
(
1 1 − − + = T k k k K T k k k k P H H P H K Rk)
−1 (2.20)(
1)
1 − − + − = kk k k k kk k k ˆ ˆ ˆx x K z H x (2.21)(
)
(
)
k k k T k k k k k k k k I K H P I K H P = − −1 − +Tugas pertam nghitung filter Kalm K k
yang diberikan pada persamaan (2.20). Langkah berikutnya adalah
T
K R
K (2.22)
an Gain a dalam tahap koreksi adalah me
memberikan sebuah update, estimasi keadaan a posteriori ˆxkk menu persamaan (2.21) dengan menggunakan pengukuran z . Langkah terakhir k dari tahap ini adalah mendapatkan sebuah estimasi kovarian erro osteriori
rut
r a p
k k
P dengan persamaan (2.22).
urunan dari persamaan-pe
Pen rsamaan (2.20) - (2.22) dapat dilihat pada Lampiran B.
n Filter Kalman
Kalman, hal yang tidak kalah penting yang perlu diperhatikan adalah menentukan terlebih dahulu filter seperti apa yang II.3.2.2. Desai
Dalam proses mendesain Filter
diinginkan. Apakah itu sebuah filter yang cepat tetapi sensitif terhadap noise ataukah sebuah filter yang lambat tetapi sangat teliti? Atau bahkan filter yang berada di tengah-tengah saja yaitu yang tidak terlalu lambat tetapi teliti juga? Semuanya tergantung dari pemilihan nilai matriks kovarian noise nya yaitu matriks kovarian noise proses Q dan matriks kovarian noise pengukuran R. Bila menginginkan sebuah filter yang cepat tetapi tidak teliti maka matriks Q sebaiknya diberi nilai yang besar. Sedangkan bila memilih untuk mendesain sebuah filter yang mempunyai ketelitian yang bagus maka matriks R lah yang harus bernilai besar. [5]
Bab II Dasar Teori_______________________________________________________________
Pada penelitian ini Filter Kalman yang dipakai adalah Filter Kalman yang bertugas untuk memprediksi keadaan selanjutnya dan mengurangi noise seadanya. Dan untuk pemilihan harga matriks Q dan R, telah dipilih suatu harga yang memungkinkan filter untuk memperoleh ketelitian yang cukup baik akan tetapi cukup cepat juga untuk mem-filter noise yang ada.
II.3.2.3. Mean Squared Error
Ada dua cara yang umum digunakan untuk menentukan performance dari sebuah filter, yaitu menghitung kesalahan kuadrat nilai tengah (mean square
error) dan mengukur luas area dari elips kepercayaan (confidence ellips). Pada
tesis ini digunakan metode MSE.
MSE didefinisikan sebagai perbedaan antara hasil pengukuran sebenarnya dengan hasil pengukuran estimasi. Pada penelitian ini kita juga menggunakan MSE (disebut juga variansi sisa) sebagai pengukuran dari prestasi filter. [7]
(
)
2∑
− = xˆ x MSE xˆ (2.23)Dimana adalah nilai rata-rata dari hasil estimasi dan x adalah nilai sebenarnya. Nilai x hanya dapat diperoleh bila data pengukuran adalah hasil simulasi (dibuat sendiri).
II.4. Arsitektur dan Algoritma untuk Track Fusion
Pada sub bab ini akan dijelaskan persoalan teknis yang berhubungan dengan track fusion. Pertama akan dijelaskan beberapa kemungkinan arsitektur data fusion dan mengenai masalah-masalah track fusion. Kemudian dilanjutkan dengan penjelasan mengenai beberapa algoritma penggabungan track hasil estimasi dan asosiasi track.
Bab II Dasar Teori_______________________________________________________________
II.4.1. Arsitektur Penggabungan Track
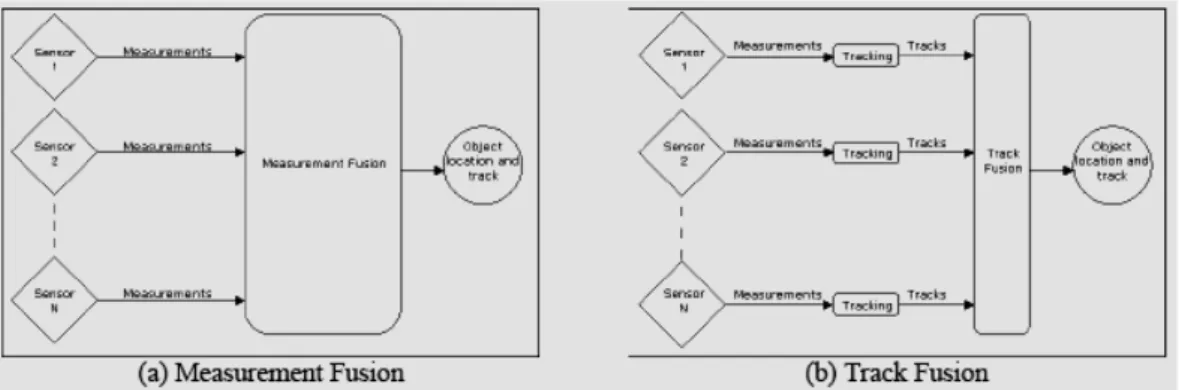
Penggunaan banyak sensor untuk target tracking dapat secara potensial memberikan hasil yang lebih baik daripada hanya menggunakan satu sensor baik dalam hal daerah cakupan, tambahan informasi dan hal yang lainnya. Dalam hal penggabungan data (data fusion) tracking ada dua jenis arsitektur penggabungan (fusion) yang berbeda, yaitu centralized fusion dan
decentralized fusion. [9] Secara teori, hasil tracking yang terbaik dapat
diperoleh dari arsitektur centralized fusion yaitu dengan menggabungkan secara langsung hasil pengukuran dari setiap sensor (disebut juga
measurement fusion). Akan tetapi, karena keterbatasan cara komunikasi dan
masalah organisasi, banyak sistem di dunia nyata mempunyai sebuah struktur hirarki dimana sistem penggabungan data tidak dapat memperoleh akses langsung akan data sensor. Yang terjadi adalah data sensor diproses terlebih dahulu secara lokal untuk menghasilkan track sensor, yang kemudian digabungkan (fused) untuk membentuk suatu ”system track”. Metode penggabungan track (track fusion) ini disebut decentralized fusion. Teknik penggabungan ini memerlukan suatu proses untuk mengasosiasikan track-track dari setiap sensor dan menghasilkan sebuah estimasi target yang lebih baik. Perbedaan kedua arsitektur tersebut dapat kita lihat pada Gambar II.6
Gambar II.6 : Dua macam arsitektur penggabungan data
Track fusion mempunyai masalah teknis yang tidak terdapat pada measurement fusion atau centralized tracking. Pada umumnya, hasil estimasi
Bab II Dasar Teori_______________________________________________________________
keadaan track yang dihasilkan oleh setiap sensor tidak dapat diperlakukan seperti hasil pengukuran dari setiap sensor dan digabungkan langsung menggunakan algoritma standar centralized tracking. Hal ini disebabkan karena fakta yang ada yaitu error pengukuran dari setiap sensor biasanya tidak tergantung dari hasil pengukuran yang sebelumnya dan selanjutnya, sedangkan error pada hasil estimasi yang diasosiasikan dengan setiap track, misalnya output tracker, pada umumnya mempunyai korelasi antara satu dengan yang lain. Hal di atas mempunyai akibat yang signifikan pada dua proses yang terdapat dalam arsitektur penggabungan track (track fusion) yaitu asosiasi dan penggabungan hasil estimasi. Perhitungan asosiasi dan penggabungan track hasil estimasi harus memperhatikan semua kemungkinan ketergantungan antara error track estimasi tersebut. Arsitektur fusion yang spesifik mempengaruhi sifat korelasi statistik dan algoritma yang harus dipakai.
II.4.2. Algoritma Penggabungan Track
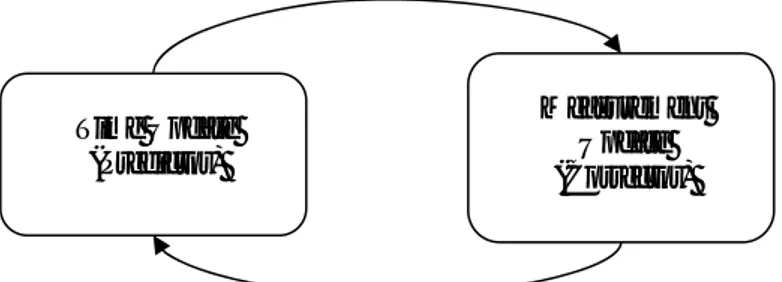
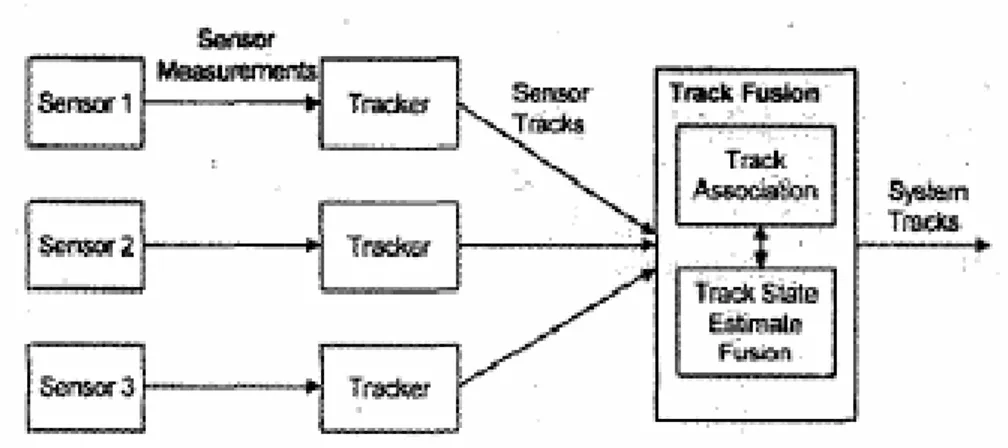
Pada sistem track fusion terdapat beberapa komponen seperti pada Gambar II.7 berikut:
Bab II Dasar Teori_______________________________________________________________
Bila dilihat Gambar II.6, tracking dengan single sensor akan menghasilkan track single sensor. Secara periodik, track-track dari sensor-sensor yang berbeda dikirim ke suatu sistem pusat untuk digabungkan. Penggabungan track terdiri dari dua langkah : asosiasi dan penggabungan track hasil estimasi. Pada langkah asosiasi, track-track dari sensor yang berbeda diasosiasikan untuk membentuk ”track sistem” , masing-masing mengacu pada sebuah target tertentu. Setelah itu, hasil estimasi dari track sistem dapat diperoleh dengan menggabungkan track-track yang telah diasosiasikan.
Ada dua kemungkinan dalam memproses asosiasi dari track-track hasil estimasi tiap sensor tergantung pada bagaimana estimasi dari track sistem akan dipakai. Berikut ini adalah penjelasannya.
II.4.2.1. Penggabungan Sensor ke System Track
Kapan pun juga sebuah kelompok track sensor diterima, hasil estimasi dari track sistem di-ekstrapolasi menurut waktu kedatangan track sensor dan digabungkan dengan track sensor yang baru datang. Proses ini diulangi ketika set berikutnya dari track sensor diterima oleh sistem. Gambar II.8 di bawah menjelaskan hal ini. Track (simbol {) A dan C menunjukkan track-track yang berasal dari Sensor 1 sedangkan track B mewakili track sistem.
Gambar II.8 : Penggabungan Sensor ke System Track
Penggabungan sensor ke sistem track mengurangi masalah yang ditimbulkan oleh proses asosiasi sehingga algoritma proses yang biasa dapat dipergunakan.
Bab II Dasar Teori_______________________________________________________________
Akan tetapi, bila memakai cara ini masalah error estimasi yang berkorelasi harus diperhatikan. Pada Gambar II.8, track sensor 1 di A dan track sistem di B mempunyai error yang berkorelasi karena mereka bergantung pada hasil dari track Sensor 1 di C. Lebih jauh lagi, error apapun pada track sistem karena proses sebelumnya pada proses asosiasi dan penggabungan akan mempengaruhi hasil penggabungan selanjutnya.
II.4.2.2. Penggabungan Sensor ke Sensor Track
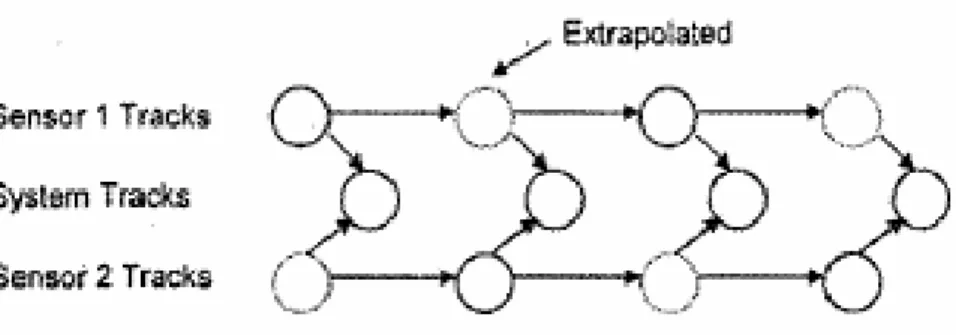
Track hasil estimasi tiap sensor (setelah diekstrapolasikan ke waktu yang sama) diasosiasikan dan digabungkan satu dengan yang lain untuk memperoleh estimasi dari track sistem (lihat Gambar II.9). Estimasi sebelumnya dari track sistem tidak akan dipakai pada proses ini. Harap diperhatikan bahwa untuk cara ini, penggabungan, secara umum, hanya dapat dilakukan bila terdapat track-track lebih dari dua sensor.
Gambar II.9 : Penggabungan Sensor ke Sensor Track
Gambar II.9 memperlihatkan track-track (simbol {) yang dihasilkan Sensor 1 dan 2 (setelah diekstrapolasi) digabungkan menjadi track sistem.
Dengan cara ini, masalah error estimasi yang berkorelasi (bila hasil sebelumnya diabaikan) tidak perlu dipertimbangkan. Error pada proses asosiasi dan penggabungan track hasil estimasi tidak diteruskan dari satu
Bab II Dasar Teori_______________________________________________________________
waktu ke selanjutnya. Akan tetapi, pendekatan ini tidaklah se-efisien cara penggabungan sensor ke sistem track karena hasil proses sebelumnya tidak dipakai pada proses berikutnya. Keuntungan proses ini adalah tidak adanya hasil yang harus disimpan sehingga menghemat memori sistem.
II.4.2.3. Penggabungan Hasil Estimasi tanpa Error yang Berkorelasi
Pada tesis ini ditentukan bahwa arsitektur yang dipakai adalah decentralized tracking atau sensor track fusion dengan algoritma penggabungan sensor ke sensor track. Untuk algoritma tersebut persamaan komputasi yang akan dipakai dijelaskan di bawah ini.
Misal , dan xˆ , P , adalah hasil estimasi linier yang paling optimal dari parameter dan matriks kovariannya yang berasal dari dua proses estimasi menggunakan dua hasil pengukuran yang berbeda yaitu z dan . Dan jika error estimasi yang berkaitan dengan xˆ dan tidak berkorelasi, naka persamaan estimasi linier yang paling optimal adalah
1 xˆ P1 2 2 1 z2 1 xˆ2 x [10]:
(
2)
1 2 1 1 1 x P x P P x ˆ ˆ ˆ = − + −(
1)
1 2 1 1 − − − + = P P P (2.24) (2.25)Persamaan ini disebut juga persamaan umum penggabungan (”fusion
equations”).
Persamaan umum penggabungan telah banyak digunakan secara luas karena kesederhanaannya dalam implementasi. Penggunaan persamaan ini menjadi optimal bila error estimasi yang dihasilkan berkorelasi, seperti di dalam penggabungan track di mana salah satu track adalah track sistem dan track yang lain adalah track salah satu sensor. Akan tetapi, ketika kedua track adalah
Bab II Dasar Teori_______________________________________________________________
track hasil sensor dan tidak ada noise proses yang dimodelkan, maka algoritma penggabungan ini dikatakan (hampir) optimal karena menghasilkan nilai yang hampir sama dengan ketika pengukuran sensor digabungkan langsung (measurement fusion).[9]
II.5. Ringkasan Bab II
Gambaran umum tentang Radar Target Tracking telah dibahas secara singkat di bagian awal dari Bab II ini. Tujuan dari target tracking adalah untuk memperoleh hasil estimasi posisi dan kecepatan dari sebuah target dengan gangguan noise seminimal mungkin. Hal ini didapat dengan cara memakai metode estimasi yang diturunkan dari permasalahan statistik sistem dinamik yang ada.
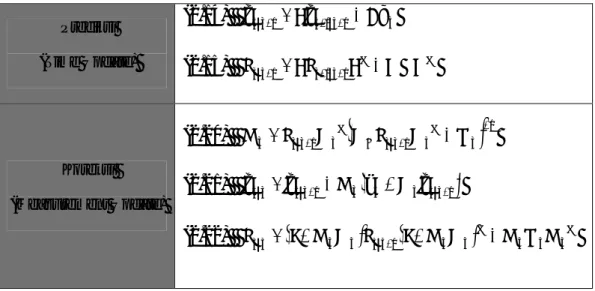
Filter Kalman dipilih sebagai metode estimasi yang optimal untuk memprediksi keadaan variabel posisi dari target dan mem-filter noise dari data hasil pengukuran sistem Radar. Rangkuman persamaan dari algoritma Filter Kalman :
Table II.1: Rangkuman persamaan algoritma Filter Kalman Prediksi (Time Update) (2.14) ˆxkk−1 =Fˆxk−1k−1+Buk (2.15) Pkk−1 =FPk−1k−1FT +GQGT Koreksi (Measurement Update) (2.20) = −1
(
−1 + k)
−1 T k k k K T k k k k P H H P H R K (2.21) ˆxkk =xˆkk−1+Kk(
zk −Hkˆxkk−1)
(2.22) Pkk =(
I−KkHk)
Pkk−1(
I−KkHk)
T +KkRkKkTBab II Dasar Teori_______________________________________________________________
Menghitung vektor estimasi dan matriks kovarian error
k k k k k ˆ ˆ Fx Bu x −1= −1 −1+ T T k k k k FP F GQG P −1= −1 −1 + Menghitung Kalman Gain
(
)
1 1 1 − − − + = T k k k k K T k k k k P H H P H R KUpdate estimasi dengan input pengukuran
(
1)
1 − − + − = kk k k k kk k k ˆ ˆ ˆ x K z H x xUpdate matriks error kovarian untuk estimasi yang telah diupdate
( ) ( ) T k k k T k k k k k k k k I K H P I K H K R K P = − −1 − +
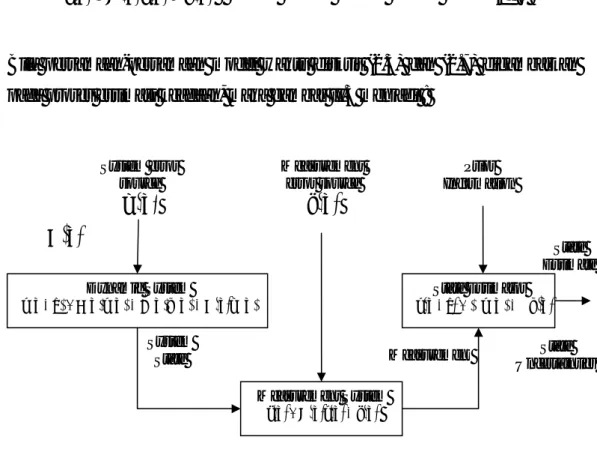
Filter diinisialisasi dengan estimasi a priori dengan matriks error kovarian nya yang berhubungan
Input : Hasil pengukuran
Output : Hasil estimasi
Gambar II.10 : Skema diagram alir dari algoritma Filter Kalman
Dan akhirnya setelah desain filter yang dipilih telah ditentukan maka di dalam sistem Multi Radar Tracking harus dilakukan penggabungan data hasil estimasi setiap Radar dengan menerapkan metode penggabungan track ke track.