xiv DAFTAR ISTILAH
A
Akurasi Ketepatan sistem dalam mengenali masukan yang diberikan sehingga menghasilkan keluaran yang benar.
Akuisisi Citra Cara penggambilan citra sebelum masuk ke sistem.
C
Capture Menangkap atau memotret gambar.
Citra uji Citra yang digunakan untuk menguji keakurasian hasil identifikasi.
Crop Pemotongan gambar.
G
Grayscale Representasi citra biner yang beraras keabuan.
K
Kurva Suatu objek geometri yang merupakan satu dimensi dan kontinyu
P
Poligon merupakan bentuk datar yang terdiri dari garis lurus yang bergabung untuk membentuk rantai tertutup atau sirkuit.
R
1
1.
BAB I
PENDAHULUAN
Latar Belakang Masalah
Pintu adalah bagian rumah sebagai akses untuk keluar ataupun masuk . Sekarang umumnya orang menggunakan kunci konvensional untuk mengunci pintu, hal ini tentu akan merepotkan jika kunci menghilang, ataupun disalahgunakan oknum tidak bertanggung jawab, hal tersebut dirasa kurang fleksibel dan praktis ketika harus menggunakan kunci konvesional, dengan perkembangan teknologi dimungkinakan untuk melakukan interaksi manusia dengan komputer melalui media visual [1] [2] [3] ini untuk mendukung berbagai kebutuhan manusia untuk lebih praktis dan fleksibel.
Penelitian sebelumnya terdapat penguncian pintu dengan menggunakan pengenalan suara ataupun pengenalan wajah, tetapi masih terdapat delay, dikarenakan waktu pemrosesan ataupun adanya kesalahan pengenalan [4] [5] . Pada penelitian kali ini akan mengembangkan sistem pintu dengan penguncian pintu berupa pola jari tangan, pola ini dapat dilakukan di depan kamera yang sudah terhubung dengan Raspberry Pi sebagai perangkat untuk melakukan pengolahan citra pada sisi kontrol akan bertugas dalam mengontrol sensor gerak, buzzer dan lampu led sebagai tanda adanya inputan berupa citra pola jari tangan.Digunakannya Raspberry Pi dikarenakan perangkat ini mempunyai dimensi yang kecil tapi dapat bekerja layaknya komputer untuk melakukan pemrosesan sinyal dan dapat juga sebagai kontrol. Pada proses rekognisi dilakukan pengenalan pola dengan convex hull dan convexity defect, sebelum ke proses convexity defect dilakukan proses convex hull ,penelitian sebelumnya menggunakan metode ini memberikan hasil yang bagus ketika diterapkan pada objek polygon berbentuk bintang sehingga sesuai dengan objek penelitian ini yaitu polygon berbentuk tangan [3] [6] .Hasil dari pemrosesan ini berupa jari berupa angka yang dapat digunakan sebagai kata sandi yang unik.
Dari permasalahan yang ada, maka dari itu penulis membuat tugas akhir yang berjudul “Perancangan Prototype Sistem Kunci Pintu dengan Pola Jari Tangan Menggunakan Raspberry Pi berbasis Video Processing“ , dengan penggunaan metode convex hull dan convexity defect tersebut diharapkan dapat memberikan akurasi yang tinggi dengan waktu proses yang singkat, agar nanti dapat diterapkan dalam penggunaan sehari hari [1].
2 Tujuan
Tujuan dari tugas akhir ini adalah :
1. Merancangan dan merealisasikan prototipe sistem pengenalan pola jari tangan pada manusia.
2. Menggunakan Raspberry Pi sebagai perangkat kontrol dan perangkat pengolahan sinyal.
3. Mengetahui tingkat akurasi, waktu proses per frame ,dan pengaruh jarak dalam memproses pola jari tangan.
Rumusan Masalah
Beberapa masalah dari tugas akhir ini antara lain :
1. Bagaimana merancang dan merealisasikan sistem pengenalan pola jari tangan pada manusia dengan metode convex hull dan convexity defects.
2. Bagaimana merancang dan merealisasikan prototype sistem penguncian pintu . 3. Bagaimana menggunakan Raspberry Pi sebagai perangkat kontrol dan pengolahan
sinyal
Batasan Masalah
Tugas akhir membatasi masalah pada :
1. Data video yang real time merupakan akuisisi dengan kamera Raspberry Pi 2. Library yang digunakan pada pemrosesan adalah OpenCV
3. Pengambilan data dengan tangan kanan menghadap ke kamera. 4. Background non-kompleks
5. Hanya satu orang objek yang terdapat pada kamera
6. Jarak dalam proses pengambilan data 30 cm sampai 110 cm. 7. Cahaya ruangan yang digunakan pada 22-25 lux
8. Bahasa pemrograman yang dipakai adalah Phyton.
Metodologi Penelitian
Penelitian Menggunakan Metode : 1. Studi Literature
Pencarian materi-materi dan referensi yang berkaitan dengan permasalahan yang dibahas, seperti materi tentang convex hull dan materi pendukung lainnya. 2. Analisis dan Kebutuhan Perancangan Sistem
3 Merupakan tahap perancangan sistem yang dibuat, yakni sebuah perangkat lunak yang mampu mengenali pola tangan, dan sistem kontrol yang mampu mendeteksi pergerakan, dan memberikan input terhadap buzzer dan LED.
3. Implementasi Sistem
Melakukan coding menggunakan bahasa pemprograman Phyton dan konfigurasi pada kontrol dan perangkat keras yang terhubung untuk membangun sistem sesuai dengan rancangan pada tahap sebelumnya.
4. Pengujian Sistem
Pada tahap ini, dilakukan pengujian terhadap sistem yang telah dibangun. Hal yang diujikan ialah seperti yang telah dipaparkan pada tahap perancangan.
5. Analisis Hasil Pengujian
Dari tahap pengujian sistem yang dilakukan sebelumnya, dilakukan analisis terhadap pengaruh digunakannya convex hull dan convexity defect untuk pengenalan pola jari tangan.
Sistematika Penulisan
Tugas akhir ini dibagi dalam beberapa topik bahasan yang disusun secara sistematis sebagai berikut :
BAB I PENDAHULUAN
Bab ini membahas latar belakang masalah, tujuan, rumusan masalah, batasa masalah, metodologi penelitian, sistematika penulisan, dan rencana kerja.
BAB II DASAR TEORI
Bab ini membahas prinsip dasar pengenalan pola gerakan tangan, istilah-istilah yang terkait dengan judul dan dasar-dasar matematika.
BAB III MODEL DAN PERANCANGAN SISTEM
Bab ini menjelaskan proses desain dan perancangan sistem pengenalan pola gerakan tangan dengan convex hull.
BAB IV HASIL YANG DIHARAPKAN
Bab ini membahas analisa hasil percobaan yang diharapkan secara kualitatif dan kuantitatif. Analisa dilakukan terhadap parameter kinerja sistem yang diamati.
4
2.
BAB II
LANDASAN TEORI
Sistem Penguncian Pintu [7][6][8][4]
Sistem penguncian pintu ini telah banyak dikembangkan sehingga lebih otomatis , dan mendukung konsep dari smart home . Pada beberapa penelitian telah dikembangkan sistem otomatisasi kunci pintu ini dengan beberapa metode seperti Voice Recognition , metode ini melakukan perintah penguncian dengan menggunakan perintah suara , metode ini tidak hanya diterapkan pada penguncian pintu saja tapi sudah diterapkan pada berbagai teknologi.Face Recognition metode ini selain dalam melakukan penguncian dilihat dari sisi keamanannya juga bisa dilakukan pencocokan identitas dengan karakteristik wajah dari seseorang , sehingga untuk bisa mengakses fitur dari penguncian hanya bisa dilakukan oleh orang tertentu.Fingertip pattern metode ini menggunakan pola dari jari tangan untuk memberikan perintah penguncian, pada penelitian kali ini pola jari tangan didapatkan dari akuisisi kamera yang sifatnya real time, dari akuisisi tersebut dilakukan pengolahan untuk menghasilkan kode unik untuk membuka penguncian , jadi dalam penelitian ini melakukan video processing yang real time, agar pengguna, dapat menggunakan fitur sistem penguncian kapan saja , ketika ada kamera yang terhubung dengan sistem prosesnya.
Raspberry Pi [2][9]
Raspberry Pi, sering juga disingkat dengan nama Raspi, adalah komputer papan tunggal (Single Board Circuit /SBC)yang memiliki ukuran sebesar kartu kredit. Raspberry Pi bisa digunakan untuk berbagai keperluan, seperti spreadsheet, game, bahkan bisa digunakan sebagai media player karena kemampuannya dalam memutar video high definition. Raspberry Pi dikembangkan oleh yayasan nirlaba, Rasberry Pi Foundation yang digawangi sejumlah developer dan ahli komputer dari Universitas Cambridge, Inggris.
5 Gambar 2.1 Raspberry Pi
Sensor PIR (Passive Infrared) [10]
Sensor PIR (Passive Infrared) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar. Sensor ini biasanya digunakan dalam perancangan detector gerakan berbasis PIR.Karena semua benda yang memancarkan energi radiasi , sebuah gerakan akan terdeteksi ketika sumber inframerah dengan suhu tertentu misalnya manusia , melewati sumber inframerah yang lain dengan suhu yang berbeda misalkan dinding , maka sensor akan membandingkan pancaran inframerah yang diterima setiap satuan waktu , sehingga jika ada pergerakan maka akan terjadi perubahaan pembacaan pada sensor. Sensor PIR terdiri dari beberapa bagian yaitu :
Lensa Fresnel
Penyaring Infra Merah Sensor Pyroelektrik Penguat Amplifier Komparator
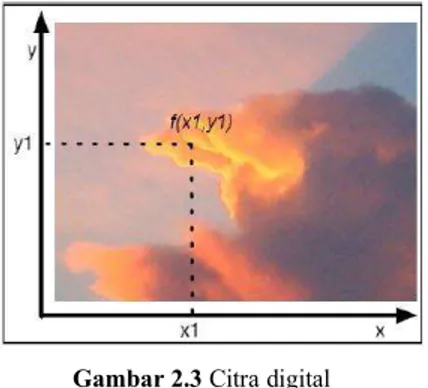
6 Gambar 2.3 Citra digital
Citra Digital [11]
Citra dapat diartikan sebagai suatu fungsi kontinyu dari intensitas cahaya (x,y) dalam bidang dua dimensi, dengan (x,y) menyatakan suatu koordinat spasial dan nilai f pada setiap titik (x,y) menyatakan intensitas atau tingkat kecerahan atau derajat keabuan (brightness atau gray level) dimana secara matematis dapat dirumuskan bahwa 0< f(x,y) <∞. Dalam bidang pengolahan citra (image processing), citra yang diolah adalah citra digital, yaitu citra kontinyu yang telah diubah ke dalam bentuk diskrit, baik koordinat ruangnya maupun intensitas (kecerahan) cahayanya melalui proses sampling dan kuantisasi.
Ketika sebuah citra yang akan melalui proses komputasi, terlebih dahulu menentukan nilai x dan y, dan f(x,y) harus berada pada jangkauan atau range tertentu yang jumlahnya terbatas. Citra dengan ketentuan tersebut disebut citra digital. Citra digital dua dimensi yang berukuran MxN, dimana f(0,0) berada pada sudut kiri dari matriks tersebut, sedangkan f(N-1,M-1) berada pada sudut kanan bawah.
Citra digital dapat direpresentasikan dalam bentuk matriks. Misalkan citra dengan ukuran M x N dimana M adalah ukuran baris dan N adalah ukuran kolom.
f(x,y) = (0,0) (0,1) … (0, 1) (1,0) (1,1) … (1, 1) ⋮ ⋮ ⋱ ⋮ ( 1,0) ( 1,1) … ( 1, 1) (2.1)
Masing-masing elemen dalam matriks disebut dengan elemen citra atau piksel, f(x,y) merupakan intensitas citra, sedangkan x dan y merupakan posisi piksel dalam citra.
Model Warna YCbCr[11]
Ruang warna YCbCr digunakan untuk video digital. Dalam format ini, informasi luminasi diwakili oleh komponen tunggal Y dan informasi warna disimpan sebagai komponen warna yang berbeda, yaitu Cb untuk Chroma biru dan Cr untuk Chroma
7 merah. YCbCr atau Y’CbCr adalah suatu keluarga ruangan warna yang dipakai sebagai bagian dari color image pipeline dalam sistem video dan fotografi. Y’ merupakan komponen luma sedangkan Cb dan Cr merupakan komponen kroma perbedaan antara biru dan merah. Tanda keterangan (‘) pada Y dipakai untuk membedakan dengan luma dari luminasi, yang berarti intensitas cahaya dienkode secara tak linier menggunakan gamma. Konversi warna YCbCr dapat diperoleh dari model RGB dengan persamaan
= 12816 128 + 65.481 128.553 24.966 37.797 74.203 112.000 112.000 93.786 18.214 (2.2) 2.6 Model Warna RGB [11][12]
Warna adalah spektrum tertentu yang terdapat di dalam suatu cahaya sempurna (berwarna putih). Nilai warna ditentukan oleh tingkat kecerahan maupun kesuraman warna. Nilai ini dipengaruhi oleh penambahan putih ataupun hitam. Dalam model ini tiap warna ditunjukkan dengan kombinasi tiga warna primer yaitu R(ed), G(reen), dan B(lue). Warna lain dapat diperoleh dengan mencampurkan ketiga warna pokok tersebut dengan perbandingan tertentu.Setiap warna pokok mempunyai intensitas sendiri dengan nilai maksimum 255 atau 8bit.
Misal warna kuning merupakan kombinasi warna merah dan hijau sehingga nilai RGB: 55 255 0. Ketiga warna pokok tersebut membentuk sisten koordinat cartesian tiga dimensi. Subruang pada diagram tersebut menunjukkan posisi tiap warna. Nilai RGB terletak pada satu sudut dan nilai cyan, magenta, dan yellow berada di sudut lainnya. Warna hitam berada pada titik asal, sedangkan warna putih terletak pada titik terjauh dari titik asal. Grayscale membentuk garis lurus dan terletak di antara dua titik tersebut.
Gambar 2.4 (a) Skema warna kubus RGB (b) Skema warna RGB yang telah dinormalisasi
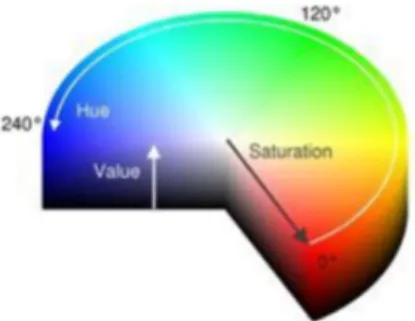
8 Model Warna HSV[12]
Model HSV (Hue Saturation Value) menunjukkan ruang warna dalam bentuk tiga komponen utama yaitu hue, saturation, dan value (atau disebut juga brightness). Hue adalah sudut dari 0 sampai 360 derajat, biasanya 0 adalah merah, 60 derajat adalah kuning, 120 derajat adalah hijau, 180 derajat adalah cyan, 240 derajat adalah biru, dan 300 derajat adalah magenta. Hue menunjukkan jenis warna (seperti merah, biru, atau kuning) atau corak warna yaitu tempat warna tersebut ditemukan dalam spektrum warna. Merah, kuning, dan ungu (purple) adalah kata-kata yang menunjukkan hue. Saturasi (saturation) dari suatu warna adalah ukuran seberapa besar kemurnian dari warna tersebut. Sebagai contoh suatu warna yang semuanya merah tanpa putih adalah saturasi penuh. Jika ditambahkan putih ke merah, hasilnya menjadi lebih berwarna-warni dan warna digeser dari merah ke merah muda (pink). Hue masih tetap merah tetapi nilai staurasinya berkurang. Saturasi biasanya bernilai dari 0 sampai 1 (atau 0 sampai 100%) dan menunjukkan nilai keabu-abuan warna dimana 0 menunjukkan abuabu dan 1 menunjukkan warna primer murni. Komponen ketiga dari HSV adalah value atau disebut juga intensitas (intensity) yaitu ukuran seberapa besar kecerahan dari suatu warna atau seberapa besar cahaya datang dari suatu warna. Value dapat bernilai dari 0 sampai 100%.
Citra Keabuan (Grayscale) [11]
Grayscale adalah representasi citra biner yang hanya memiliki satu layer. Jumlah warna pada grayscale adalah 256 karena jumlah bitnya adalah 8, nilainya berada pada jangkauan 0-255. Citra grayscale mempunyai kemungkinan warna hitam untuk nilai minimal dan warna putih untuk nilai maksimal. Warna hitam diwakili oleh koordinat ruang (0, 0, 0) yang berarti intensitas semua warna pokok adalah 0% dan warna putih oleh koordinat (1, 1, 1) yang berarti semua warna pokok berintensitas 100%. Bila semua warna pokok mempunyai intensitas yang sama
9 antara dan berada diantara 0 dan 1, maka yang tampak adalah warna abuabu.Citra grayscale dengan mudah dapat dihasilkan dari citra warna RGB dengan mengambil nilai rata-rata dari ketiga komponen warna pokok dengan menggunakan persamaan berikut:
= 0.29900R + 0.58700G + 0.11400B (2.3) Citra Biner[12]
Citra biner adalah citra digital yang hanya memiliki dua kemungkinan nilai pixel yaitu hitam dan putih .Citra biner juga disebut sebagai citra B&W(black and white) atau citra monokrom.Hanya dibutuhkan 1 bit untuk mewakili tiap nilai setiap piksel dari citra biner.Citra biner sering kali muncul sebagai hasil dari proses pengolahan seperti segmentasi , pengambangan , morfologi ataupun dithering.
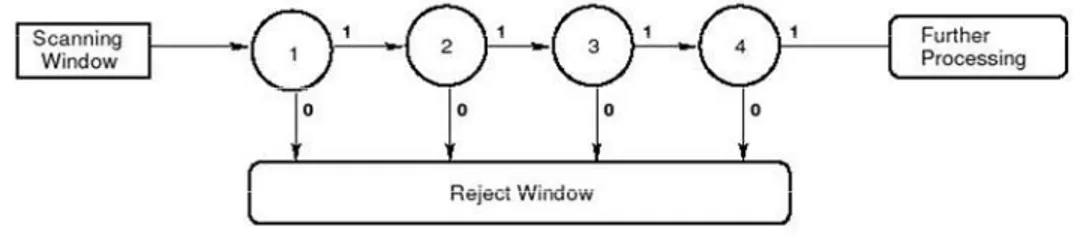
Convex Hull[6][13]
Convex Hull adalah poligon yang disusun dari subset titik sedemikian sehingga tidak ada titik dari himpunan awal yang berada diluar poligon tersebut (semua titik berada di batas luar atau di dalam area yang dilingkupi oleh polygon tersebut). Simple polygon adalah bentuk dua dimensi yang mempunyai banyak sudut dimana tidak terdapat perpotongan antara sudutnya. Setiap simple polygon mempunyai daerah dalam dan daerah luar. Sebuah simple polygon dikatakan convex jika besarnya derajat dalam yang terbentuk untuk setiap sudut lebih kecil dari 180 derajat. Convex hull dari sebuah polygon P adalah daerah terkecil dari convex polygon dimana melingkupi polygon P. Bisa juga dikatakan rubber band yang menutupi sekeliling P. Convex hull dari sebuah convex polygon P adalah P itu sendiri.
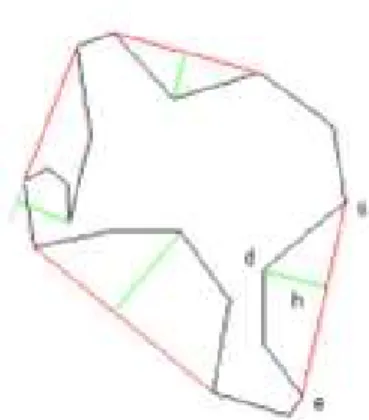
10 Convexity Defect [14] [6]
Convexity Defect adalah sebuah ruang antara garis kontur dengan objek actual. Defect tersebut berguna untuk menemukan feature pada sebuah poligon, salah satunya yaitu untuk mendeteksi jari tangan manusia.
Dari Gambar 2.8 di atas, terlihat convex hull digambarkan dengan garis merah yang menyelubungi poligon dengan garis konturnya yang berwarna hitam. Simbol “s” dan “e” menunjukkan “start point” dan “end point” dari convexity defect tersebut. Sedangkan simbol “d” melambangkan “depth point”, yaitu titik kontur yang terletak antara “s” dan “e” yang merupakan titik terjauh antara kontur dengan garis convex hull yang dilambangkan dengan “se”. Simbol “h” yaitu “depth” atau kedalaman dari defect yang merupakan jarak dari “d” hingga garis “se” Start point, end point, depth point, dan depth, keempat elemen tersebut yang akan digunakan untuk dapat menemukan feature dari sebuah poligon sehingga dapat diolah lebih lanjut.
Gambar 2.7 Convex Hull
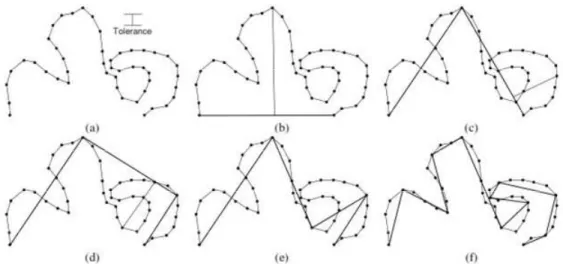
11 Algoritma penyederhanaan garis Douglas-Peucker [15]
Algoritma penyederhanaan garis Douglas-Peucker merupakan salah satu metode yang diakui sebagai salah satu metode yang terbaik dalam memberikan representasi terbaik dari garis aslinya.Algoritma ini banyak digunakan dalam bidang computer grafis dan sistem informasi geografis.Ada dua varian dari algoritma ini , metode O asli (nm) dimana n adalah jumlah n jumlah simpul input dan m adalah jumlah segmen output dan dapat bekerja pada dimensi berapapun , dan O (n log n) yang hanya dapat bekerja pada bidang polyline bidang 2D yang sederhana. Dari kedua varian tersebut garis disederhanakan dengan memberikan pendekatan pada suatu nilai , apabila nilai tersebut dirasa tidak memenuhi maka akan dilakukan penyederhanaan garis.
Haar Like Feature [16] [17]
Secara umum, Haar-Like Feature digunakan dalam mendeteksi objek pada image digital. Nama Haar merujuk pada suatu fungsi matematika (Haar Wavelet) yang berbentuk kotak, prinsipnya sama seperti pada fungsi Fourier. Awalnya pengolahan gambar hanya dengan melihat dari nilai RGB setiap piksel, namun metoda ini ternyata tidaklah efektif. Viola dan Jones kemudian mengembangkannya sehingga terbentuk Haar-Like feature.
Haar-like feature memproses gambar dalam kotak-kotak, dimana dalam satu kotak terdapat beberapa pixel. Per kotak itu pun kemudian di-proses dan didapatkan
12 perbedaan nilai (threshold) yang menandakan daerah gelap dan terang. Nilai – nilai inilah yang nantinya dijadikan dasar dalam image processing.
Lalu untuk gambar bergerak(video), perhitungan dan penjumlahan piksel terjadi secara terus – menerus dan membutuhkan waktu yang lama. Oleh karena itu, penjumlahan diganti dengan integral sehingga didapatkan hasil lebih cepat. Hasil deteksi dari Haar-Like kurang akurat jika hanya menggunakan satu fungsi saja sehingga biasanya digunakan beberapa fungsi sekaligus (massal). Semakin banyak fungsi yang digunakan maka hasilnya akan semakin akurat. Pemrosesan Haar-Like feature yang banyak tersebut diorganisir atau diatur di dalam classifier cascade.
Orientasi pada tiga titik berurutan [13]
Untuk membuat keputusan yang diskrit, kita membuat operasi geometri pada sebuah titikyang dianalogikan operasi relasi (<,-,>) dengan angka.
Diberikan tiga titik yang berurutan <p,q,r> pada bidang, dikatakan mempunyai orientasi positif jika titik tersebut sebuah segitiga counterclockwise oriented, orientasi negatif jika titik sgitiga clockwise oriented, dan zero jika titik collinear
Orientasi tergantung bagaimana titik itu berada.Orientasi didefenisikan sebagai sebuah tanda dari determinan dalam koordinat yang homogeneus
(2.4) Gambar 2.10 Cascade-classifier
13
3.
BAB III
MODEL DAN PERANCANGAN SISTEM
Diagram Blok Sistem
1. Kamera dari Raspberry Pi secara realtime akan mengamati pergerakan, dengan pencahayaan dan jarak yang dibatasi agar dapat di deteksi dan di proses pada tahap selanjutnya.
2. Di bagian selanjutnya Raspberry Pi akan memproses setiap frame citra dari hasil tangkapan kamera.
3. Setelah diolah ,ketika sistem dapat mengerti dari pola yang dimaksud maka akan ditindaklanjuti dari bagian output.
4. Output dari sistem adalah bunyi suara dari buzzer , dan nyala lampu LED , buzzer akan berbunyi ketika mendeteksi adanya pergerakan , dan adanya pola dari jari yang dideteksi.
Gambar 3.1 Diagram blok pada sistem
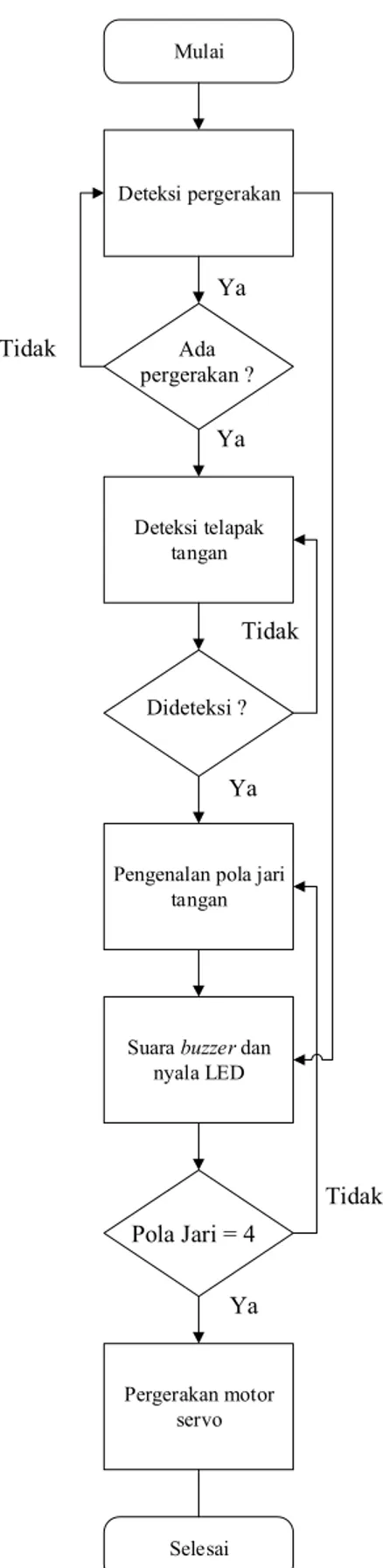
14 Mulai
Deteksi pergerakan
Deteksi telapak tangan
Pengenalan pola jari tangan
Suara buzzer dan nyala LED
Pergerakan motor servo
Selesai Diagram Alir pada Sistem
Pola Jari = 4 Tidak Ada pergerakan ? Tidak Ya Ya
Gambar 3.2 Diagram alir pada sistem
Ya
Dideteksi ?
Ya Tidak