BAB IV
PENGUJIAN DAN ANALISA
Bab ini membahas tentang pengujian dan analisa dari Sistem Simulasi yang telah di desain pada bab sebelumnya. Secara umum pengujian ini bertujuan untuk mengecek apakah piranti yang telah dibuat dapat bekerja sesuai dengan spesifikasi perancangan yang telah ditetapkan sebelumnya. Pengujian yang akan dilakukan antara lain: Pengujian Sensor, Pengujian Output Fuzzy Terhadap Perubahan Suhu ,Pengujian Response Sistem Simulasi. Namun sebelum di uji, terlebih dahulu ditampilkan hasil implementasi dari desain pada bab sebelumnya.
4.1. Hasil Desain
Pada sub-bab ini menampilkan hasil implementasi desain yang dilakukan pada bab sebelumnya seperti design maket simulasi kendali, Perancangan sistem elktronik, perancangan software dan lainnya hingga bentuk Sistem Simulasi keseluruhan.
Gambar 4.1 Hasil Desain Maket Sistem Simulasi
Gambar diatas merupakan hasil desain untuk maket sistem simulasi kendali suhu. Rangka dari maket ini seluruhnya berbahan akrilik yang cukup kuat untuk menahan panas hingga 80oC..
Gambar 4.2 Hasil Desain Maket Sistem Simulasi Bagian Power dan Kendali
Gambar 4.3 Hasil Desain Maket Sistem Simulasi pada Bagian Dalam
4.2. Pengujian Sensor
Pengujian Sensor ini bertujuan untuk mengetahui apakah sensor dapat berkerja dengan baik sesuai dengan kemampuan penalarannya, selain itu juga untuk melihat nilai output sensor yang dihasilkan yang nantinya akan menjadi input dari fuzzy.
Sebelum pengujian dilakukan, terlebih dahulu adalah menentukan Test Point untuk pengujian pada rangkaian yang akan didata, Adapun proses pengujian yang dilaksanakan adalah sebagai berikut :
4.2.1. Pengujian Sensor DHT 11
Pengujian sensor DHT 11 yaitu dengan cara memberi tegangan catu daya sebesar 5vdc dan memberikan stimulasi udara panas secara tidak langsung sehingga dapat menimbulkan perubahan suhu yang fluktuatif, sedangkan output dari sensor DHT langsung dihubungkan dengan Voltmeter Digital untuk melihat perubahan tegangan yang terjadi. Dan untuk mengathui fluktuatif stimulasi di gunakan Thermo-Hygrometer Digital.
Tabel 4.1. Hasil Pengujian Sensor DHT 11 Suhu Sekitar Sensor (oC) Output DHT 11 (Volt) 20 0.19 25 0.24 30 0.30 35 0.35 40 0.40 45 0.46
Dari hasil pengujian diketahui tegangan keluaran sensor rata rata naik sebesar 50 mV untuk setiap perubahan 5oC atau 10 mV/oC, maka dengan ini sensor dapat dikatakan sudah berkerja dengan baik.
Setelah pengujian sensor secara Stand Alone kini sensor DHT 11 akan diuji dengan menggunakan rangkaian keseluruhan. Yang mana pegujian ini di lakukan dengan menjalankan keseluruan sistem simulasi dan dengan membandingkan hasil penalaran sensor DHT 11 dengan Thermo-Hygrometer Digital.
Tabel 4.2. Hasil Pengukuran Suhu antara DHT11 dan Thermo-Hygrometer Digital
Berdasarkan Pengujian Tabel 4.2 dapat dilihat bahwa selisih pengukura antara sensor DHT 11 (Komponen yang digunakan) dan Thermo-Hygrometer Digital (Sebagai Alat pembanding) yaitu di dapat rata-rataselisih nilai sebesar 0.64. Poroses pengukuran dilakukan dengan cara memanaskan ruang simulasi sampai dengan 40oC kemudian di amati proses penurunan suhu sampai dengan
titik terendahnya.
Pengujian DHT 11 Thermo-Hygrometer
Selisih Nilai Ke- (Celcius) Digital (Celcius) (Celcius)
1 28 28,3 0,3 2 29 29,1 0,1 3 30 29,9 0,1 4 31 30,6 0,4 5 32 31,5 0,5 6 33 32,3 0,7 7 34 33,1 0,9 8 35 33,7 1,3 9 36 34,4 1,6 10 37 36,1 0,9 11 38 37,6 0,9 12 39 39,5 0,5 13 40 40,2 0,2
4.2.2. Pegujian Hall Sensor
Pengujian Sensor Hall-Effect (Build-In) yaitu dengan mengamati jumlah putaran yang terbaca oleh sensor dan yang terbaca oleh Tachometer DT 2234C, proses pengujian sensor menggunakan keseluruan sistem karena saling berkaitan dengan program pembacaan output sensor dan putaran fan.
Tabel.4.3. Hasil Pengujian Hall-Effect Sensor
Berdasarkan Tabel.4.3 pengujian Hall Effect Sensor sebagai pembaca kecepatan putaran kipas dengan membandingkan hasil pembacaan Tachometer DT2234C, berdasarkan tabel tersebut Rata Rata Selisih nilai antara sensor dan alat pembanding sebesar 3 RPM.
4.3. Pengujian Output Fuzzy
Pengujian output fuzzy ini bertujuan untuk mengetahui seberapa besar nilai kalkulasi fuzzy yang dilakukan Arduino. Tentunya dalam pengujian kalkulasi fuzzy ini membutuhkan perbandingan yang di anggap benar dalam melakukan kalkulasi, dalam hal ini digunakan tool box fuzzy pada MATLAB sebagai pembanding kalkulasi. Selain itu, pengujian ini juga untuk mengetahui
Nilai Nilai Selisih Hall-Effect (RPM) Tachometer (RPM) Nilai (RPM) 1445 1448 3 1650 1649 1 1807 1811 4 1940 1945 5 2100 2098 2 2253 2256 3 2450 2446 4 2620 2618 2 2709 2715 6
response dari kontrol fuzzy itu sendiri ketika diberi input berupa suhu dan jumlah status aktifasi mesin.
Sebelum dilakukan pengujian output fuzzy pada Arduino, terlebih dahulu dibuat pemodelan fuzzy sesuai perancangan pada bab 3 menggunakan tool box fuzzy yang di sediakan pada MATLAB.
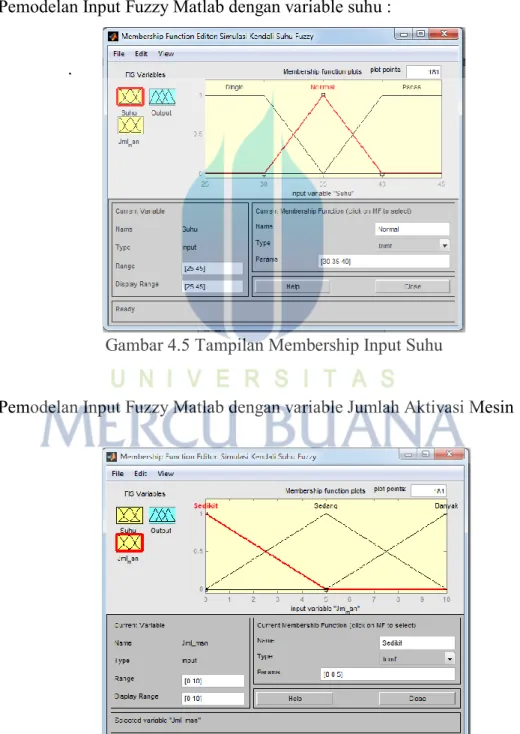
Pemodelan Input Fuzzy Matlab dengan variable suhu :
.
Gambar 4.5 Tampilan Membership Input Suhu
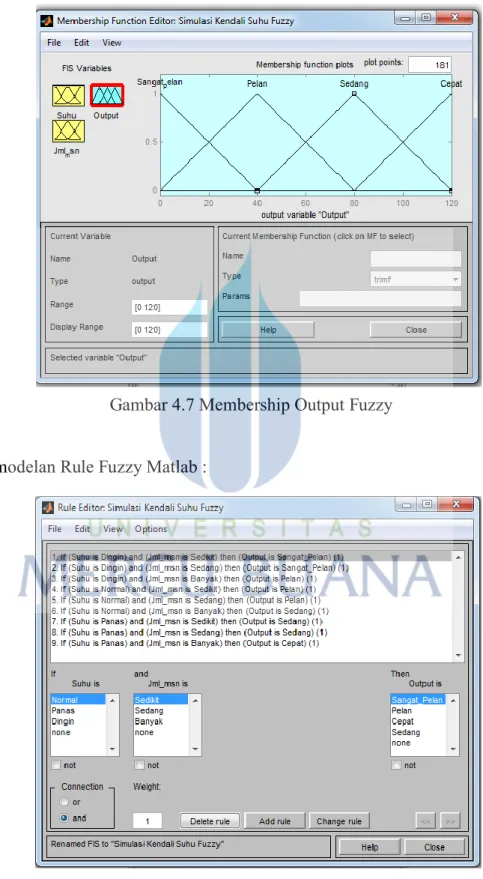
Pemodelan Input Fuzzy Matlab dengan variable Jumlah Aktivasi Mesin :
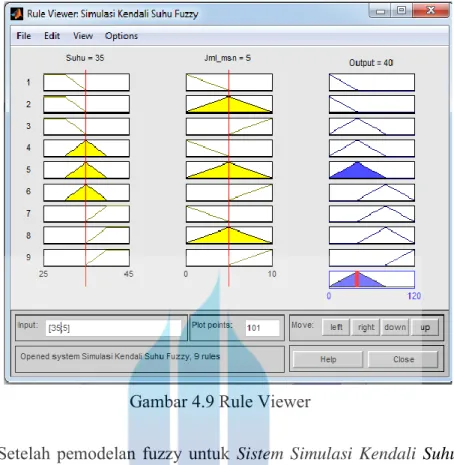
Pemodelan Output Fuzzy Matlab dengan Nilai PWM :
Gambar 4.7 Membership Output Fuzzy
Pemodelan Rule Fuzzy Matlab :
Gambar 4.9 Rule Viewer
Setelah pemodelan fuzzy untuk Sistem Simulasi Kendali Suhu dengan tool fuzzy pada MATLAB selesai dilakukan, maka tahap selanjutnya adalah menguji kalkulasi yang dilakukan oleh Arduino dengan cara memberikan input Suhu dan Jumlah Status Aktifasi Mesin serta mencatat output fuzzy yang tertera pada LCD kedalam tabel. Begitu juga untuk kalkulasi MATLAB nya dengan menginput nilai error dan delta error pada rule viewer yang ada pada tool fuzzy MATLAB. Setelah itu nilai kalkulasi dari Arduino dihitung dan di input ke dalam tabel. Berikut adalah cara perhitungan Hasil Kalkulasi Fuzzy untuk mengetagui nilai Real PWM untuk pengaturan kecepatan putaran kipas:
...(13)
Ket:
Cal Value = Nilai Kalkulasi Fuzzy Scale PWM = 120
Tabel.4.5. Hasil Pengujian Output Fuzzy
D
A
R
Dari tabel pengujian diatas dapat dilihat bahwa rata-rata error kalkulasi yang dihasilkan pada saat pengujian adalah sebesar 0.57%. Dengan prosentase
Pengujian INPUT Kalkulasi Fuzzy
(Nilai PWM) Selisih Ke- Suhu o C Jumlah Mesin (UNIT) Arduino (Decimal) MATLAB (Decimal) Kalkulasi 1 27 0 13 12,9 0.78 % 2 29 0 13 12,9 0.78 % 3 30 0 13 12,9 0.78 % 4 31 0 25,81 25,7 0.43 % 5 31 1 25,81 25,7 0.43 % 6 31 2 27,78 27,5 1.02 % 7 31 4 25,81 25,6 0.82 % 8 31 6 41,1 41,9 1.91 % 9 31 2 32,67 32,6 0.21 % 10 32 4 32,67 32,6 0.21 % 11 32 6 45 44,6 0.90 % 12 32 7 52 51,8 0.39 % 13 33 2 36,78 36,7 0.22 % 14 33 4 36,78 36,7 0.22 % 15 33 6 47,31 47,8 1.03 % 16 33 8 59,49 59,88 0.65 % 17 33 10 63,23 63,2 0.05 % 18 34 2 39,02 39 0.05 % 19 34 4 39,14 39,1 0.10 % 20 34 6 48,75 48,7 0.10 % 21 35 2 40 40 0.00 % 22 35 6 49,66 49,7 0.08 % 23 35 9 70,35 70,8 0.64 % 24 36 8 64,01 64,9 1.37 % 25 36 9 71,07 71,6 0.74 % 26 36 10 80,7 81,5 0.98 % 27 37 10 82,99 83,7 0.85 % 28 38 10 87,22 87,4 0.21 %
error dari kalkulasi yang sangat kecil ini, maka dapat disimpulkan bahwa perhitungan dan program untuk kalkulasi yang di programkan pada Arduino sudah tepat dan dapat digunakan sebagai controller Simulasi Kendali Suhu
Sedangkan output response dari fuzzy terhadap peubahan suhu dan jumlah mesin aktif tidak dapat disimpulkan polanya bagaimana, namun dari toolbox fuzzy pada MATLAB bisa dilihat response fuzzy terhadap error dan delta errornya.
4.4. Pengujian Output RPM
Pengujian output RPM ini bertujuan untuk mengetahui seberapa besar nilai karkulasi dihasilkan logiak fuzzy terhadap output putaran yang dilakukan Arduino. Tentunya dalam pengujian ini membutuhkan perbandingan yang di anggap benar dalam melakukan kalkulasi, dalam hal ini digunakan tool box fuzzy pada MATLAB sebagai pembanding kalkulasi. Selain itu, pengujian ini juga untuk mengetahui response dari kontrol fuzzy terhadap perubahan kecepatan putaran itu sendiri ketika diberi input berupa suhu dan jumlah status aktifasi mesin.
Sebelum dilakukan pengujian output RPM pada Arduino, terlebih dahulu dibuat pemodelan fuzzy sesuai perancangan pada bab 3 menggunakan tool box fuzzy yang di sediakan pada MATLAB
Pemodelan Input Fuzzy Matlab dengan variable suhu :
Gambar 4.10 Membership Suhu Fuzzy untuk Output RPM
Pemodelan Input Fuzzy Matlab dengan variable Jumlah Aktivasi Mesin :
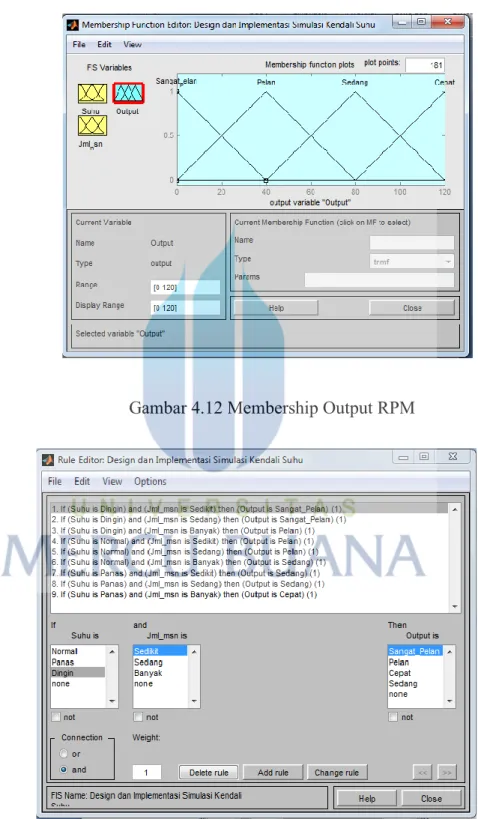
Pemodelan Output RPM Matlab :
Gambar 4.12 Membership Output RPM
Gambar 4.14 Rule Viewer Output Fuzzy
Setelah pemodelan RPM fuzzy untuk Sistem Simulasi Kendali Suhu dengan tool fuzzy pada MATLAB selesai dilakukan, maka tahap selanjutnya adalah menguji kalkulasi yang dilakukan oleh Arduino dengan cara memberikan input Suhu dan Jumlah Status Aktifasi Mesin serta mencatat output fuzzy yang tertera pada LCD kedalam tabel. Begitu juga untuk kalkulasi MATLAB nya dengan menginput nilai error dan delta error pada rule viewer yang ada pada tool fuzzy MATLAB. Setelah itu nilai kalkulasi dari Arduino dihitung dan di input ke dalam table, Berikut:
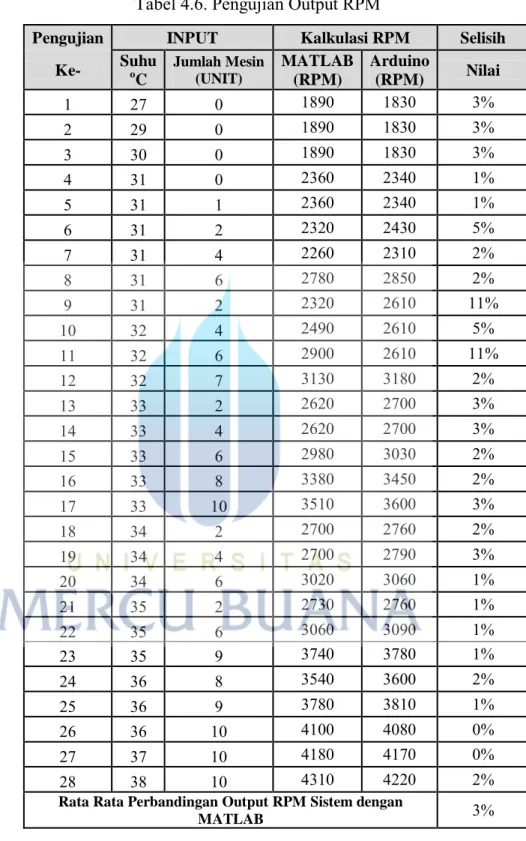
Tabel 4.6. Pengujian Output RPM
Pengujian INPUT Kalkulasi RPM Selisih Ke- Suhu o C Jumlah Mesin (UNIT) MATLAB (RPM) Arduino (RPM) Nilai 1 27 0 1890 1830 3% 2 29 0 1890 1830 3% 3 30 0 1890 1830 3% 4 31 0 2360 2340 1% 5 31 1 2360 2340 1% 6 31 2 2320 2430 5% 7 31 4 2260 2310 2% 8 31 6 2780 2850 2% 9 31 2 2320 2610 11% 10 32 4 2490 2610 5% 11 32 6 2900 2610 11% 12 32 7 3130 3180 2% 13 33 2 2620 2700 3% 14 33 4 2620 2700 3% 15 33 6 2980 3030 2% 16 33 8 3380 3450 2% 17 33 10 3510 3600 3% 18 34 2 2700 2760 2% 19 34 4 2700 2790 3% 20 34 6 3020 3060 1% 21 35 2 2730 2760 1% 22 35 6 3060 3090 1% 23 35 9 3740 3780 1% 24 36 8 3540 3600 2% 25 36 9 3780 3810 1% 26 36 10 4100 4080 0% 27 37 10 4180 4170 0% 28 38 10 4310 4220 2%
Rata Rata Perbandingan Output RPM Sistem dengan
MATLAB 3%
Dari tabel pengujian diatas dapat dilihat bahwa simpangan nilai yang dihasilkan pada saat pengujian antara karkulasi Matlab dengan keadaan Real
0 1000 2000 3000 4000 5000 6000 MATLAB Arduino JML_MSN Suhu
adalah sebesar 3%. Dengan prosentase error dari kalkulasi yang sangat kecil ini, maka dapat disimpulkan bahwa perhitungan dan program untuk kalkulasi yang di programkan pada Arduino sudah tepat dan dapat digunakan sebagai controller Simulasi Kendali Suhu
Sedangkan output response dari fuzzy terhadap peubahan suhu dan jumlah mesin aktif tidak dapat disimpulkan polanya bagaimana, namun dari toolbox fuzzy pada MATLAB bisa dilihat response fuzzy terhadap error dan delta errornya.
Output RPM Kipas Terhadap Input
Gambar 4.15 Grafik Output Simulasi Kendali Suhu
Dari hasil Grafik diatas merupakan grafik pengujian output Sistem Simulasi Kendali Suhu terhadap perubahan parameter input, pengujian ini dilakukan dengan cara menambah atau mengurai jumlah mesin yang aktif sehingga berpengaruh terdahap perubahan suhu dan tentunya akan berpengaruh terhadap output yaitu kecepatan putaran kipas.
4.5. Pengujian Respon Simulasi Kendali Suhu
Pengujian response Simulasi Kendali Suhu ini untuk menjawab tujuan dari penelitian ini. Pengujian ini bertujuan untuk mengetahui response dari keseluruan sistem yang menggunakan metode fuzzy . Pengujian ini dilakukan dengan cara menjalankan keseluruhan sistem dan mendatanya setiap perubahan kondisi input yang diterima oleh Controller dan membandingkan perubahan apa yang terjadi. Untuk menguji respon sistem ini, yaitu dengan memberi input jumlah mesin mulai dari 1 unit hingga 10 unit dengan keadaan kipas di aktifkan, pengujian ini dilakukan untuk membuktikan apakah sistem simulasi ini dapat menyesuaikan suhu ruangan di Rang 32-35 oC walaupun semua input mesin sedang diaktifkan semua. Pengujian ini dilakukan sebanyak 3 kali sebagai bahan perbandingan yang menyatakan stabil atau tidaknya sistem yang dibuat.
Tabel 4.7. Percobaan Respon 1
Suhu Luar Jumlah Mesin Aktif (Unit) Suhu Ruang (oC) RPM
Jedah Waktu Penambahan Aktivasi Mesin 26,5 oC 1 28 1880 2 Menit 2 30 1980 2 Menit 3 31 2280 2 Menit 4 32 2610 2 Menit 5 32 2610 2 Menit 6 33 3030 2 Menit 7 33 3210 2 Menit 8 33 3480 2 Menit 9 33 3570 2 Menit 10 33 3600 2 Menit
Gambar 4.16 Grafik Percobaan 1
Berdasarkan Tabel dan Grafik Percobaan 1, sistem simulasi ini dapat merespon dengan baik dan dapat mempertahankan suhu normal di range 33 oC.
Tabel 4.8. Percobaan Respon 2
Suhu Luar Jumlah Mesin Aktif (Unit) Suhu Ruang (oC) RPM
Jedah Waktu Penambahan Aktivasi Mesin 28,3 oC 1 29 1920 2 Menit 2 30 1980 2 Menit 3 32 2580 2 Menit 4 33 2710 2 Menit 5 34 2790 2 Menit 6 34 3060 2 Menit 7 34 3300 2 Menit 8 35 3570 2 Menit 9 35 3780 2 Menit 10 35 4110 2 Menit
Gambar 4.17 Grafik Percobaan 2
Berdasarkan Tabel dan Grafik Percobaan 2, sistem simulasi ini dapat merespon dengan baik dan dapat mempertahankan suhu normal di range 35 oC.
Tabel 4.9. Percobaan Respon 3
Suhu Luar Jumlah Mesin Aktif (Unit) Suhu Ruang (oC) RPM
Jedah Waktu Penambahan Aktivasi Mesin 29,8 oC 1 30 1920 2 Menit 2 31 2400 2 Menit 3 32 2580 2 Menit 4 33 2700 2 Menit 5 33 2700 2 Menit 6 34 3060 2 Menit 7 34 3270 2 Menit 8 35 3600 2 Menit 9 35 3780 2 Menit 10 35 4080 2 Menit
Gambar 4.18 Grafik Percobaan 3
Berdasarkan Tabel dan Grafik Percobaan 3, sistem simulasi ini dapat merespon dengan baik dan dapat mempertahankan suhu normal di range 35 oC.
Tabel 4.10. Percobaan Respon 4
Suhu Luar Jumlah Mesin Aktif (Unit) Suhu Ruang (oC) RPM
Jedah Waktu Penambahan Aktivasi Mesin 31,1 oC 1 30 1920 2 Menit 2 31 2400 2 Menit 3 32 2580 2 Menit 4 33 2820 2 Menit 5 33 2820 2 Menit 6 34 3180 2 Menit 7 35 3420 2 Menit 8 35 3610 2 Menit 9 35 3820 2 Menit 10 35 4110 2 Menit
Gambar 4.19 Grafik Percobaan 4
Berdasarkan Tabel dan Grafik Percobaan 4, sistem simulasi ini dapat merespon dengan baik dan dapat mempertahankan suhu normal di range 35 oC.
Dari ke 4 (empat) percobaan yang telah dilakukan, semua percobaan telah berjalan dengan lancar dan semua perangkat sistem simulasi ini merespon dengan baik, dari hasil percobaan yang telah dilakukan menunjukan bahwa respon sistem ini dapat menjaga suhu ruangan pada jangkauan normal yaitu 32 oC hingga 35 oC.
Dari ke-4 (Empat) percobaan ini jika dicermati secara berkala sistem simulasi ini sangat terpengaruh oleh keadaan suhu udara luar. Terlihat pada percobaan pertama ketika suhu luar menunukan di level 26oC maka sistem
simulasi ini dapat mempertahankan suhu konstan pada jangkauan 32oC walaupun
semua input status aktivasi mesin dalam keadaan semua dalam keadaan aktif dan hal tersebut juga terjadi pada percobaan ke-4 yang mana suhu luar ruang simulasi pada level 30,2 oC sehingga sistem ini hanya dapat mempertahankan suhu pada jangkauan 35oC. Walaupun demikian dari hasil percobaan tersebut sistem dapat menjanga suhu secara stabil serta sesuai dengan perancangan dan tidak ada suhu yang melebihi batas normal yaitu 36 – 40oC .
Mengenai berpengaruhnya suhu luar ruang simulaisi ini dikarenakan metode pendinginan pada simulasi ini hanya menggunakan Kipas High Speed tanpa dilengkapi perangkat Chilling Procces atau proses pendinginan. Sehingga proses pendinginan pada simulasi ini hanya memanfaatkan perubahan sirkulasi udara yang sangat cepat. Dengan demikian walaupun proses simulasi ini terpengaruh dengan suhu ruangan sekitar, namun proses pengendalian fuzzy ini dapat berjalan dengan lancar dan sesuai dengan design yang telah dirancang pada bab sebelumnya.
BAB V
KESIMPULAN DAN SARAN
5.1. KesimpulanBerdasarkan pengujian dan analisa yang telah dilakukan, maka dapat disimpulkan:
1. Respon Sistem Simulasi ini cukup stabil terhadap perubahan kondisi Input sehingga dapat menyesuaikan serta dapat mempertahankan level suhu ruang simulasi pada jangkauan 32-35 oC.
2. Proses pendinginan pada sisitem ini sangat terpengaruh oleh suhu luar disekitar plant simulasi ini, semakin level suhu diluar rendah maka akan semakin baik proses pendinginannya, dan sebaliknya
3. Proses penalalaran sensor rata rata memiliki peluang Error yang kecil terlihat dari penggujian DHT 11 terhadap perangkat sensor yang dianggap sebagai pembanding selisih antara pembacaan temperatur hanya mencapai 0,64 o
C.
4. Penggunaan Hall Effect Sensor dan rangkaian PWM yang terdapat pada kipas atau Build-in dapat berkerja dengan respon yang tinggi, terlihat dari selisih pembacaan kecepatan Hall Effect Sensor terhadap Tachometer menghasilkan selisih rata rata hanya 4 rpm saja.
5. Untuk perhitungan kalkulasi fuzzy pada sistem ini berdasarkan perhitungan MATLAB dan perhitungan Program Arduino, terdapat selisih rata-rata sebesar 0.57 %
5.2. Saran
1. Dengan keterbatasan waktu dan pembuatan pemrograman khususnya untuk interface pada simulasi ini, Bagi yang berminat untuk megembangakan model simulasi kendali suhu ini dapat membuat tampilan interface untuk mempermudah pengamatan serta pemahaman Metode Fuzzy Logic. Seperti mengkobinasikan sistem simulasi ini dengan software LAB-View sebagai interface dari keseluruhan sistem.