Sebagai Salah Satu Syarat Untuk Memperoleh Derajat Sarjana Teknik Program Studi Teknik Elektro
Disusun oleh:
ALEXANDER MANALU NIM: 025114057
JURUSAN TEKNIK ELEKTRO FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
2007
BAND PASS FILTER IMPLMENTATION IN MODULATED
FREQUENCY TELEMETRY SYSTEM
Submitted as Partial Fulfillment Of The Requirement for Sarjana Teknik Degree In Electrical Engineering Study Program
written by :
ALEXANDER MANALU NIM: 025114057
ELECTRICAL ENGINEERING STUDY PROGRAM FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY YOGYAKARTA
2007
MOTO
Your labour is not in vain in the Lord.
( Corinthians )
Winners don’t Quit.
That’s why they Win
( mi k e Br es c i a )
I have set the LORD always before me: because he is at my right hand, I shall not be moved. Thou wilt shew me the path of life: in thy presence is fulness of joy; at thy right hand there are pleasures for evermore.
( Psalms )
PERSEMBAHAN
ku persembahkan karya kecilku ini untuk :
Tuhan Yesus Kristus atas segala kasih dan karunia-Nya serta penyertaan-Nya,
Bapak dan Ibuku yang selalu memberikan doa dan dukungan,
Abang dan kakakku yang senantiasa mendoakan dan mengasihi aku,
Almamaterku
ALEXANDER MANALU 025114057
Telemetri merupakan sebuah sistem pengukuran yang memungkinkan kita untuk dapat melakukan pengukuran data dari jarak jauh. Telemetri menjadi solusi bagi masalah pengukuran jarak jauh di daerah yang sulit dijangkau mengingat pentingnya efisiensi waktu, tenaga dan biaya dalam melakukan pengukuran.
Sistem telemetri ini terdiri dari dua bagian utama, yaitu bagian pengirim dan bagian penerima. Bagian pengirim terdiri dari sensor suhu, pengkondisi sinyal, voltage controlled
oscillator (VCO), rangkaian penjumlah, dan pemancar FM. Bagian penerima terdiri dari
penerima FM, low pass filter (LPF) , band pass filter (BPF), frequency to voltage converter (F to V) dan pengkondisi sinyal.
Sistem telemetri ini menggunakan suhu sebagai sumber masukan bagi sistem yang diproses menggunakan sensor suhu LM 335. Keluaran LM 335 dikondisikan sesuai dengan masukan yang dibutuhkan oleh VCO untuk menghasilkan frekuensi. Selanjutnya keluaran dari VCO akan dijumlahkan untuk selanjutnya ditransmisikan melalui Pemacar FM. Dengan menggunakan penerima FM, sinyal diterima kemudian dimasukkan ke LPF untuk dipisahkan dari frekuensi tinggi. Keluaran LPF dimasukkan ke BPF 1 dan BPF 2. Adapun BPF 1 dapat melewatkan frekuensi dalam batas yang ditentukan sedangkan BPF 2 tidak dapat bekerja sesuai dengan yang dirancang. Keluaran BPF akan dimasukkan ke F to V. Keluaran F to V akan dikondisikan sesuai dengan perubahan suhu.
Dari hasil pengujian, tidak semua bagian dalam alat ini bekerja sesuai dengan apa yang direncanakan. Pada bagian pengirim sistem telah bekerja mendekati perancangan baik untuk sensor I dan sensor II. Pada bagian penerima untuk sensor I dapat dihasilkan keluaran yang mendekati suhu referensi sedangkan untuk sensor II tidak dapat menghasilkan keluaran.
Kata kunci: sistem telemetri, band pass filter
BAND PASS FILTER IMPLMENTATION IN TELEMETRY SYSTEM MODULATED BY FREQUENCY
By
ALEXANDER MANALU 025114057
Telemetry is a measurement system that lets us to measure from long distance. Telemetry becomes solution for long distance measurement in isolated area hence the important of time efficiency,energy, and the cost in doing measurement .
This system consist of two main parts, they are transmitter and receiver. Transmiter is consist of temperature sensor, signal conditioning, voltage controlled oscillator (VCO) , summing amplifier and FM transmitter. The receiver is consist of FM receiver, low pass filter (LPF), band pass filter (BPF), frequency to voltage converter (F to V) and signal conditioning.
This telemetry systems uses temperature as the source for system which is processed using LM 335 temperature sensor. The LM 335 output is conditioned as the input that is needed by VCO to produce frequency. Next, the output of VCO will be summed and then transmitted by FM transmitter. By using FM receiver, signal is received and inserted to the LPF to be separated from high frequency. The output of the LPF is inserted to the BPF 1 and BPF 2. BPF 1 can pass the frequency in the limits which is set initially, but BPF 2 cannot work properly as the designed. The output of BPF will be inserted to F to V. The output of F to V will be conditioned as the temperature change.
From the experiments, not all of the parts of this telemetry system is function properly. In the transmitter section, system has work closely to design, whether for sensor 1 and sensor 2. In the receiver section, sensor 1 resulted in output which is close to referential temperature, in the contrarary, for the sensor 2 cannot result in output.
Keywords: telemetry system, band pass filter
Sistem Telemetri Termodulasi Frekuensi”.
Penulis menyadari bahwa skripsi ini tidak mungkin dapat terselesaikan dengan baik
tanpa bantuan dari berbagai pihak. Oleh karena itu penulis mengucapkan terima kasih
kepada:
1. Bapak A. Bayu Primawan, S.T., M.Eng. selaku Pembimbing I yang bersedia
membagikan ilmu yang dimilikinya dalam membantu proses penyusunan tugas akhir
ini.
2. Bapak Martanto, ST., M. T. , selaku Pembimbing II.
3. Segenap dosen dan karyawan Teknik atas bimbingan, ilmu dan pelayanan yang
diberikan selama ini.
4. Mas Mardi, mas Suryo, mas Hardi , mas Broto yang telah membantu dalam penyediaan
alat di Lab.
5. Keluargaku yang telah memberikan kasih sayang, dorongan moril dan materiil kepada
penulis.
6. Teman-teman KOMSEL ( Agung, Dwi, Budiaji, Andryan, Yudi, Yanuar, Adi), teman –
teman di JKMK “kalian luar biasa”.
7. Teman- teman di TEKSAPALA
8. Teman-teman TE ‘02 atas segala pengalaman hidup bersama selama ini.
HALAMAN JUDUL ... i
HALAMAN JUDUL (INGGRIS)... ii
HALAMAN PERSETUJUAN... iii
HALAMAN PENGESAHAN... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN MOTO DAN PERSEMBAHAN ... vi
INTISARI... vii
ABSTRACT... viii
KATA PENGANTAR ... ix
DAFTAR ISI... x
DAFTAR GAMBAR ... xiv
DAFTAR TABEL... xvii
BAB I. PENDAHULUAN ... 1
I.1 Latar Belakang………... …………... 1
I.2 Rumusan Masalah ... 1
I.3 Batasan masalah... 2
I.4 Tujuan penelitian ... 2
1.5 Manfaat Penelitian ... 2
I.6 Metodologi Penulisan ... 2
I.7 Sistematika penulisan... 3
2.2.2 Jenis- Jenis Filter ... 5
2.2.3.Low Pass Filter………... 8
2.2.3.1. Low Pass Filter Tipe Butterworth Orde II . …… 10
2.2.3.2. Peng-kaskade-an……….. 12
2.2.4. Band Pass Filter Chebysev ... 13
2.3 Penguat Operasional Sebagai Pembangun Dasar………... 18
2.3.1 Dasar- Dasar Penguat Operasional……….. 18
2.3.2. Penguat Pembalik…… ……… 20
2.3.3 Penguat Tak membalik ( non- inverting) ... 21
2.3.4. Pengikut Tegangan (Voltage Follower) ... 22
2.3.5. Penguat Penjumlah (Summing Amplifier) ... 23
2.3.6. Integrator ... 24
2.4. Frequency to Voltage Converter... 26
2.5 Sensor Suhu... 27
2.6. Voltage Controlled Oscillator... 29
2.7. Pemancar FM ... 31
2.7.Pemancar FM Mono... 31
2.7.2 Pemancar FM Stereo ... 32
2.8. Penerima FM... 33
3.1 Bagian Pengirim………..………. 34
3.1.1 Sensor Suhu Elektronis LM 335... 34
3.1.2 Penyangga ... 35
3.1.3 Osilator Terkendali Tegangan(VCO)... 35
3.1.4 Pengkondisi Sinyal... 38
3.1.5 Penguat Penjumlah... 42
3.1.6. Pemancar FM ... 43
3.2. Bagian Penerima ... 43
3.2.1 Penerima FM... 43
3.2.2. Filter Aktif... 43
3.2.2.1.Filter Pelewat Bawah dengan fc = 11kHz... 43
3.2.3. Band Pass Filter (BPF) Chebysev... 45
3.2.4. Frequency to Voltage Converter (F to V)... 52
3.2.4.1. F to V Untuk Sensor I dan II... 52
3.2.5.Pengkondisi Sinyal Untuk Tegangan Keluaran Sistem... 53
BAB IV. HASIL PENGUJIAN DAN PEMBAHASAN ... 58
4.1 Keluaran Sensor LM 335 ... 58
4.2 Keluaran Pengkondisi Sinyal ... 59
4.3 Keluaran VCO dan Penguat Penjumlah... 61
4.4. Low Pass Filter... 64
4.5 Band Pass Filter... 66
4.5.1 Band Pass Filter orde 3 ... 66
BAB V. KESIMPULAN DAN SARAN ... 75
5.1 Kesimpulan ... 75
5.2 Saran... 75
DAFTAR PUSTAKA
DAFTAR LAMPIRAN
Gambar 2.1 Diagram Blok Pengirim ... 4
Gambar 2.2 Diagram Blok Penerima ... 4
Gambar 2.3 Karakteristik Ideal Low Pass Filter... 6
Gambar 2.4 Karakteristik Ideal High Pass Filter... 7
Gambar 2.5 Karakteristik Ideal Band Pass Filter... 7
Gambar 2.6 Karakteristik Ideal Band Reject Filter... 7
Gambar 2.7 Karakteristik Aktual Band Pass Filter... 8
Gambar 2.8 Kurva Tanggapan Low Pass Filter ... 9
Gambar 2.9. Dasar Low Pass Filter... 9
Gambar 2.10 Low Pass Filter Orde 2 ... 10
Gambar 2.11 Low Pass Filter Orde 2 ... 10
Gambar 2.12 Diagram Blok Untuk Penapis Orde Tinggi ... 12
Gambar 2.13.a Tanggapan BPF Chebysev Orde 3 ... 14
Gambar 2.13.b Tanggapan BPF Chebysev Orde 5 ... 14
Gambar 2.13.c Tanggapan BPF Chebysev ... 15
Gambar 2.13.d Low Pass Eqivalent... 15
Gambar 2.14. Rangkaian tiap stage BPF ... 18
Gambar 2.15 Simbol Op-amp Dalam Rangkaian ... 19
Gambar 2.16 Catu Daya Bipolar Sederhana ... 19
Gambar 2.17 Sinyal Pada Masukkan Positif... 20
Gambar 2.18 Sinyal Pada Masukkan Negatif ... 20
Gambar 2.23. Rangkaian Penguat Penjumlah... 24
Gambar 2.24. Rangkaian Integrator Op-amp ... 25
Gambar 2.25. Rangkaian Yang Menggunakan Resistor Untuk Meminimalkan Offset error... 25
Gambar 2.26. Karakteristik Ideal Pengubah Frekuensi ke Tegangan ... 26
Gambar 2.27. Diagram Blok LM 2907 M ... 27
Gambar 2.28.Bentuk IC LM 335 ... 28
Gambar 2.29. Sensor Suhu Sederhana Tanpa Kalibrasi ... 28
Gambar 2.30.a Diagram Blok VCO... 30
Gambar 2.30.b Bentuk Fisik IC VCO... 30
Gambar 2.31.Diagram Blok Pemancar FM... 32
Gambar 2.32.Diagram Blok Penerima FM ... 33
Gambar 3.1Untai Terkalibrasi LM 335... 34
Gambar 3.2 Buffer... 35
Gambar 3.3 Rancangan VCO Sensor I ... 36
Gambar 3.4 Rancangan VCO Sensor II ... 37
Gambar 3.5 Pengkondisi Sinyal Sensor I... 40
Gambar 3.6 Pengkondisi Sinyal Sensor II ... 42
Gambar 3.8 Low Pass Filter 11 kHz... 45
Gambar 3.9 Tanggapan BPF Orde 3 ... 46
Gambar 3.10 Rangkaian Tiap Stage Pada BPF Chebysev... 48
Gambar 3.11 Rancangan BPF Orde 3 ... 49
Gambar 3.12 Tanggapan BPF Orde 5 ... 50
Gambar 3.13 Rancangan BPF Orde 5 ... 52
Gambar 3.14 Frequency To Voltage ... 53
Gambar 3.15 Pengkondisi Sinyal Keluaran Sensor I ... 55
Gambar 3.16 Pengkondisi Sinyal Keluaran Sensor II... 57
Gambar 4.1 Grafik Keluaran LM 335 Terhadap Perubahan Suhu ... 59
Gambar 4.2.a Keluaran VCO 2 kHz dan Penguat Penjumlah... 62
Gambar 4.2.b Keluaran VCO 7 kHz dan Penguat Penjumlah ... 63
Gambar 4.3 Tanggapan Frekuensi LPF ... 66
Gambar 4.4 Sinyal Masukkan dan Keluaran LPF... 66
Gambar 4.5 Tanggapan Frekuensi BPF Orde 3 ... 68
Gambar 4.6 Keluaran BPF dan Masukkan BPF ... 68
Gambar 4.7 Sinyal Keluaran BPF Orde 5 dan Orde 3 ... 70
Gambar 4.8 Tanggapan Frekuensi BPF orde 5 ... 71
Tabel 2.4 Percobaan Karakterisitik IC MC14046... 30
Tabel 3.1 Pengkondisi Sinyal Sensor I ... 38
Tabel 3.2 Pengkondisi Sinyal Sensor II ... 40
Tabel 3.3 Nilai -Nilai komponen BPF Orde 3 ... 49
Tabel 3.4 Nilai -Nilai komponen BPF Orde 5 ... 51
Tabel 3.5 Pengkondisi Sinyal Sensor I ... 53
Tabel 3.6 Pengkondisi Sinyal Sensor II ... 55
Tabel 4.1 Data Penelitian Sensor Suhu LM335 ... 58
Tabel 4.2 Keluaran Pengkondisi I... 60
Tabel 4.3 Keluaran Pengkondisi II... 60
Tabel 4.4 Perbandingan Keluaran VCO I Dengan Hasil Perhitungan ... 63
Tabel 4.5. Perbandingan Keluaran VCO II Dengan Hasil Perhitungan... 64
Tabel 4.6 Hasil Pengujian LPF ... 65
Tabel 4.7 Hasil Pengujian BPFOrde 3 ... 67
Tabel 4.8 Frekuensi Keluaran BPF dalam Sistem Telemetri... 69
Tabel 4.9 Hasil Pengujian BPF Orde 5 ... 70
Tabel 4.10 Keluaran Pengkondisi Sinyal Keluaran Sensor I ... 72
Tabel 4.11.Keluaran Pengkondisi Sinyal Keluaran Sensor II... 73
Sinyal ... 73
Telemetri merupakan sebuah sistem pengukuran yang memungkinkan kita
untuk dapat melakukan pengukuran data dari jarak jauh. Telemetri menjadi solusi
bagi masalah pengukuran jarak jauh di daerah yang sulit dijangkau mengingat
pentingnya efisiensi waktu, tenaga dan biaya dalam melakukan pengukuran [1].
Filter merupakan rangkaian atau jaringan listrik yang dirancang untuk
melewatkan atau meloloskan arus bolak-balik yang dibangkitkan pada frekuensi
tertentu serta memblok atau memperlemah semua arus bolak-balik yang
dibangkitkan dengan frekuensi-frekuensi yang lain. Filter memiliki peranan yang
sangat luas dalam rekayasa listrik dan elektronika serta merupakan elemen yang
sangat penting dalam banyak sistem komunikasi dan instrumentasi di mana
proses pemisahan dari sinyal-sinyal yang diinginkan dan tidak diinginkan,
termasuk di dalamnya adalah sinyal-sinyal pengganggu noise, merupakan proses
esensial untuk mencapai keberhasilan operasi dari fungsi sistem yang
bersangkutan.
Secara garis besar terdapat dua jenis filter yaitu filter pasif dan filter aktif.
Filter pasif terdiri atas komponen-komponen rangkaian yang berupa resistor,
kapasistor, dan induktor. Sementara filter aktif, di samping terdiri atas komponen-
komponen rangkaian yang berupa resistor, kapasitor, dan induktor, pada filter ini
juga terdapat komponen aktif yang biasanya diwujudkan oleh komponen op-amp.
Kedua jenis filter ini dapat dibagi lebih lanjut menjadi empat kelas yang berbeda
sesuai penggunaanya masing-masing. Keempat kelas ini adalah filter low-pass,
filter high-pass, filter band-pass, dan filter band-stop.
1.2.
Rumusan Masalah
Rumusan masalah yang dihadapi adalah bagaimana merancang band pass
filter Chebysev yang sesuai dengan sistem telemetri termodulasi frekuensi
sehingga data yang dikirim oleh pemancar FM dapat diterima oleh penerima FM
sesuai dengan data yang terkirim.
1.3.
Batasan Masalah
Pada penelitian ini, dilakukan batasan-batasan terhadap alat yang akan
diteliti. Adapun sistem telemetri yang digunakan merupakan sistem telemteri
yang telah ada [5]. Batasan yang dilakukan antara lain :
1. Band pass filter yang digunakan adalah jenis Chebysev.
2. Modulasi yang digunakan adalah modulasi FM.
3. Orde filter yang digunakan 3 dan 5.
1.4.
Tujuan Penelitian
1. Menerapkan filter aktif pada transmisi gelombang radio.
2. Memperluas penggunaan dan manfaat gelombang radio sebagai
media transmisi.
3. Menerapkan teknik modulasi frekuensi dalam sistem telemetri.
1.5.
Manfaat Penelitian
1. Mengetahui lebih dalam tentang cara kerja Band Pass Filter Chebysev.
2. Menambah pengetahuan tentang validitas data dalam sistem telemetri.
3. Menambah pengetahuan tentang pengiriman data secara analog.
4. Merealisasikan salah satu bentuk pengiriman data.
5. Mendukung perkuliahan dengan lebih memperjelas cara kerja filter
aktif yang menggunakan rangkaian Operasional Amplifer.
1.6.
Metodologi Penelitian
Dalam penyusunan proposal tugas akhir ini dilakukan beberapa
3. Melakukan pengujian terhadap hasil perancangan dalam
impelementasi.
1.7.
Sistematika Penulisan
Sistematika penulisan dibagi dalam lima bagian yaitu:
BAB I. PENDAHULUAN
Bab ini berisi latar belakang, penelitian, tujuan, dan manfaat
penelitian, batasan masalah yang diteliti dan sistematika penulisan laporan.
BAB II. DASAR TEORI
Dasar teori berisi teori tentang konsep-konsep sistem telemetri dan
komponen-komponen yang diperlukan.
BAB III. PERANCANGAN ALAT
Pada bab ini membahas tentang perancangan alat, dan fungsi
masing-masing bagian dari sistem telemetri.
BAB IV. PENGAMATAN DAN PEMBAHASAN
Bab ini berisi tentang hasil pengamatan dan analisis hasil dalam
hubungannya dengan validitas data.
BAB V. PENUTUP
Pada bab ini berisi tentang kesimpulan dari hasil pengamatan alat
yang dibuat dan berisi saran-saran yang memuat ide-ide untuk
DASAR TEORI
2.1.
Dasar Kerja Sistem Telemetri
Blok diagram sistem telemetri dapat dilihat pada gambar 2.1 dan 2.2.
Sensor I dan II mendeteksi perubahan di sekitarnya dan kemudian mengubahnya
menjadi sebuah nilai tegangan tertentu yang sesuai dengan perubahan yang
terjadi, tegangan tersebut dikonversikan ke dalam bentuk sinyal frekuensi agar
dapat dipancarkan oleh pemancar FM. Pada bagian penerima, frekuensi-fekuensi
ini diterima oleh penerima FM difilter oleh sebuah Low Pass Filter untuk
meredam frekuensi di atas frekuensi audio dan diuraikan kembali dengan Band
Pass Filter, frekuensi keluaran dari filter ini akan dikonversikan kembali ke dalam
bentuk tegangan sehingga dapat diketahui perubahan suhu yang terjadi, yang
diwakili oleh keluaran tegangan tersebut. Apabila kondisi yang dikirim sama
dengan kondisi yang diterima, berarti sistem ini telah bekerja sesuai dengan yang
diharapkan.
Sensor I
Antena VCO
Modulator FM VCO
Pengkondisi Sinyal
Sensor II Pengkondisi Sinyal
Gambar 2.1 Diagram Blok Pengirim
Voltmeter Antena
F to V Demodulator
FM
F to V Pengkondisi Sinyal
Voltmeter
Pengkondisi Sinyal LPF
BPF I
BPF 2
Filter didefinisikan sebagai sebuah alat atau rangkaian atau substansi yang
meneruskan atau meloloskan arus listrik pada frekuensi-frekuensi atau jangkauan
frekuensi tertentu serta menahan (menghalangi) frekuensi-frekuensi lainnya [6].
2.2.2.
Jenis-Jenis Filter
Berdasarkan komponen penyusunnya, filter dapat dibagi menjadi 2 jenis,
yaitu :
1. Filter Pasif
Filter pasif merupakan suatu rangkaian filter yang hanya terdiri dari
inti filter, yaitu kombinasi resistor (R), kapasitor (C), dan induktor (L).
Kelebihan yang dimiliki, yaitu :
1. Mampu memenuhi karakteristik filter yang bagus dengan penerapan yang
luas dari frekuensi audio sampai frekuensi yang sangat tinggi.
2. Handal untuk penerapan pada frekuensi tinggi.
Sedangkan kekurangannya, yaitu :
1. Adanya masalah pada sisi rendah pada rentang frekuensi audio.
2. Ukuran fisik induktor yang semakin besar untuk induktansi yang besar
dan biaya untuk pengadaan induktor relatif besar.
2. Filter aktif
Filter aktif merupakan suatu rangkaian filter yang terdiri dari kombinasi
resistor, kapasitor dan satu atau lebih komponen aktif, biasanya penguat
operasional dengan feedback. Kelebihan yang dimiliki, yaitu :
1. Tidak ada sinyal yang hilang. Hal ini disebabkan penguat operasional
mampu menyediakan penguatan atau gain, sehingga sinyal masukan tidak
akan segera mengalami pelemahan (atenuasi) selama rangkaian
2. Biaya dan kemudahan. Biaya pembuatan filter aktif lebih murah dari pada
filter pasif, sebab tidak menggunakan komponen induktor yang harganya
relatif mahal dan tidak selalu tersedia di pasaran.
3. Penyetelan. Filter aktif mudah disetel (tune) untuk jangkauan frekuensi
yang lebar tanpa mempengaruhi tanggapan rangkaian yang telah
ditentukan (sesuai dengan yang diinginkan).
4. Isolasi. Sebagai akibat dari penggunaan penguat operasional, filter aktif
akan memiliki impedansi masukan yang tinggi dan keluaran yang rendah,
hal ini sebenarnya hampir menjamin tidak adanya interaksi antara filter
dengan sumber atau beban sinyal.
Sedangkan kekurangannya, yaitu :
1. Membutuhkan catu daya tersendiri.
2. Kurang handal dibanding komponen pasif.
3. Perlu feedback sehingga ada kemungkinan tidak stabil.
4. Batasan praktis frekuensi kerja 100 KHz (bekerja baik di bawah 100
KHz).
Jika berdasarkan band, filter dapat dikelompokkan ke dalam 4 jenis, yaitu:
1. Filter Pelewat Rendah (Low Pass Filter, LPF)
Filter pelewat rendah memilih frekuensi-frekuensi rendah dan menolak
frekuensi-frekuensi tinggi. Karakteristik idealnya, yaitu :
Tanggapan amplitudo
f fc
1
Gambar 2.3. Karakteristik Ideal Low Pass Filter
2. Filter Pelewat Tinggi (High Pass Filter, HPF)
Filter pelewat tinggi menolak frekuensi-frekuensi rendah dan melewatkan
f fc
f fo
Gambar 2.4. Karakteristik Ideal High Pass Filter
3. Filter Pelewat Jalur (Band Pass Filter, BPF)
Filter pelewat jalur melewatkan frekuensi-frekuensi dalam pita
tertentu, dan menolak yang lainnya. Karakteristik idealnya, yaitu :
Tanggapan amplitudo
1
Gambar 2.5. Karakteristik Ideal Band Pass Filter
f fc
1 1
4. Filter Penolak Jalur (Band Rejected Filter, BRF)
Filter penolak jalur menolak frekuensi-frekuensi dalam pita tertentu
dan melewatkan frekuensi-frekuensi di atas dan di bawah pita frekuensi
tersebut. Karakteristik idealnya, yaitu :
Tanggapan amplitudo
Gambar 2.6. Karakteristik Ideal Band Rejected Filter
Terdapat 2 area pada filter dengan karakteristik ideal di atas, yaitu :
1. Pass Band, rentang frekuensi yang dilewatkan (ditunjukkan dengan nilai
1).
2. Stop Band, rentang frekuensi yang ditolak (ditunjukkan dengan nilai 0).
Filter aktual tidak mempunyai karakteristik ideal seperti gambar diatas,
1. Pass Band, rentang tertentu dengan penguatan.
2. Stop Band, rentang tertentu dibawah level yang ditentukan.
3. Transition Band, rentang diantara pass band dan stop band
Gambar 2.7 menunjukkan karakteristik aktual dari band pass filter.
Tanggapan amplitudo
Gambar 2.7. Karakteristik Aktual Band Pass Filter
dengan : a = Stop band
b = Transition band
c = Pass band
2.2.3.
L
ow Pass Filter
(LPF
)
Filter pelewat rendah atau LPF akan memberikan tegangan keluaran yang
konstan dari DC hingga frekuensi cut off tertentu. Frekuensi cut off (fc) disebut
juga frekuensi 0,707, frekuensi –3 dB, di mana frekuensi – frekuensi di atas (fc)
akan diredam atau diperkecil.
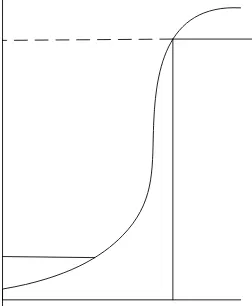
Kurva tanggapan frekuensi untuk filter pelewat bawah dapat diperlihatkan
dalam gambar 2.8. Dalam gambar 2.8 ini dapat dilihat bahwa orde yang lebih
besar menghasilkan tingkat kecuraman yang lebih curam dibandingkan dengan
Gambar 2.8. Kurva Tanggapan Low Pass Filter
Dalam praktek fc diambil pada titik tengah separuh daya sebesar 0,707
tegangan maksimum, keadaan ini dinyatakan dalam bentuk desibel (dB).
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − =
Vi Vo
dB 2log (2.1)
dB ⎟
⎠ ⎞ ⎜
⎝ ⎛ − =
Volt Volt 1 707 , 0 log 20
dB = - 3dB
Peluruhan tapis op-amp dapat dirancang agar memiliki karakteristik yang
berbeda. Kemiringan -20 dB/dekade berarti bahwa bila frekuensi meningkat 10×
fc, tegangan akan berkurang 20 dB. Semakin besar rugi – rugi dB/dekade berarti
semakin terjal kemiringannya, ini mencerminkan batas penyumbatan yang lebih
tajam. Rangkaian sederhana untuk filter LPF diperlihatkan dalam gambar 2.9.
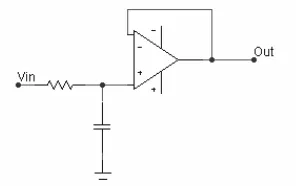
Gambar 2.9. Dasar Low Pass Filter
Konfigurasi rangkaian gambar di atas adalah pengikut tegangan . Resistor
frekuensi vin di bawah fc, XC kapasitor besar, sehingga sebagian besar Vin jatuh
ke kapasitor C, sedangkan bila diberi Vin yang lebih besar, maka Vout yang
dihasilkan juga besar. Penguatan akan maksimum pada frekuensi–frekuensi
rendah, sehingga sebagian besar Vin jatuh ke resistor R, akibatnya kapasitor C
akan memintas Vin ke ground, dengan Vin yang kecil maka Vout yang
dihasilkannya juga kecil. Penguatan akan di bawah harga maksimum pada
frekuensi–frekuensi yang lebih tinggi.
2.2.3.1.
Low Pass Filter
Tipe Butterworth Orde II
LPF orde 2 Voltage Controlled Voltage Source dengan komponen sama
ditunjukkan seperti gambar 2.10.
Gambar 2.10. Low Pass Filter Orde 2
Gambar 2.10 dapat juga digambarkan seperti dalam gambar 2.11
0 0
2 +ω
⎟⎟ ⎠ ⎜⎜ ⎝ + Q S 2 1 2 1 1 2 1 1 2 2 1 2 1 1 2 ) ( ) ( ) ( C C R R S C R R R R S C C R R k s Vi S Vo S H + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + =
= (2.3)
Dengan k = gain penguat (k =
A B R R + 1 )
ω0 = frekuensi kritis penguat (rad/sec)
2 1 2 1 0 1 C C R R =
ω (2.4)
Sehingga memberikan fc
2 1 2 1 0 2 1
2 R R CC
fc
π π ω
=
= (2.5)
Untuk mempermudah perhitungan dalam praktek, dan dengan prinsip
komponen sama, nilai R1 = R2 =R, dan C1 = C2 = C sehingga rumusannya menjadi:
RC fc
π
2 1
= (2.6)
Sehingga tanggapan Butterworth untuk Low Pass Filter orde 2 dari
persamaan (2.3) dapat disederhanakan menjadi:
2 0 0 2 2 0 ) 3 ( ) ( ω ω ω + − + = S K S K S
H (2.7)
2 0 0 2 2 0 ) ( ω αω ω + + = S S K S
H (2.8)
Dengan membandingkan persamaan (2.7) dan (2.2) maka diperoleh hubungan
antara Q, α, dan k:
k Q − = 3 1 atau Q
Untuk tanggapan frekuensi butterworth orde 2 maka:
707 , 0 2 1
= =
Q (2.9)
=3− 1 =3− 2 =1,586
Q
k (2.10)
Untuk penguat non-inverting berlaku:
A B
A B
R R R
R
k ⎟⎟= −
⎠ ⎞ ⎜⎜
⎝ ⎛
+
= 1 2 (2.11)
Sehingga :
⎥ ⎦ ⎤ ⎢
⎣ ⎡
+ − =
A B
R R
1 3 α
Dari gambar 2.8 tanggapan frekuensi, pada saat frekuensi cutoff penguatan
atau gain turun -3 dB dari penguatan passband. Low pass filter mempunyai nilai
kecuraman -40 dB/dekade, yaitu untuk setiap 1 dekade frekuensi, penguatan akan
turun 40 dB dari penguatan pada frekuensi cutoff, demikian juga untuk orde yang
lebih tinggi penguatannya akan turun sebesar nilai kecuramannya.
2.2.3.2. Peng-kaskade-an (
cascading
)
Penapis aktif dengan orde lebih dari dua dapat dibuat dengan cara
menghubungkan secara (cascade) penapis orde pertama dan kedua, jika ada
penapis orde kedua yang dikaskadekan maka bagian bagian penapis orde kedua
tersebut tidak sama, hal ini dapat dilihat pada gambar 2.12.
Table 2.1 Nilai Untuk Tanggapan Butterworh
Orde Kutub Kecuraman Faktor
Redaman(α)
A B
R R
1 1 20 Optional -
2 2 40 1,4142 0,5858
2 1 1
3
1
60
1 1
2 1,8477 0,1523
4
2 80 0,7654 1,2346
2 1 1
2 1,6181 0,3819
5
1
100
1,6180 1,3820
2 1,931 0,0684
2 1,4142 0,558
6
2
120
0,5158 1,4824
2.2.4.
Band Pass Filter
Chebysev
Band pass filter atau tapis lolos antara digunakan untuk meloloskan
frekuensi dengan rentang tertentu yang dibatasi oleh frekuensi cutoff atas dari
frekuensi cutoff bawah [3], tanggapan frekuensi dari BPF Chebysev dapat dilihat
Gambar 2.13.a Tanggapan BPF Chebysev Orde 3
f3 f1 f2 f4
0
[T]
fo
αmax
αmin Stop
band Stop
band
Gambar 2.13.b Tanggapan BPF Chebysev Orde 5
Ciri yang paling menonjol pada band pass filter Chebysev adalah adanya
ripel pada tanggapan maksimum pass band. Pada tiap – tiap nilai n (kutub) yang
berbeda, bentuk ripel pass band yang berbeda. Dari gambar 2.13.a d.2.13 b dapat
kita lihat bentuk ripel untuk BPF orde 3 (2.13a) dengan 3 buah ripel dan untuk
BPF orde 5 (2.13b) dengan 5 buah ripel Bentuk ripel pada tanggapan BPF
Gambar 2.13c Tanggapan BPF Chebychev
F1 dan F2 bukan merupakan batas frekuensi cut off atas dan cut off bawah,
melainkan merupakan batas ripel minimum yang terjadi atau batas dari αmin.
Parameter penting pada BPF Chebysev adalah:
1. Menghitung Ωp dan Ωs dengan menetapkan low pass ekuivalen ke band pass
filter, yang dapat dilihat pada gambar. Ωp merupakan indikasi ternormalisasi
frekuensi pass band maksimum, sedangkan Ωs merupakan indikasi
ternormalisasi dari frekuensi mulainya stop band. Ωp selalu dianggap = 1.
Sedangkan Ωs dapat dilihat seperti persamaan (2.12) 1 2 3 4
Ω
−
Ω
Ω
−
Ω
=
Ω
s (2.12)2. Menghitung nilai n yang akan menentukan banyaknya kutub-kutub yang harus
dipergunakan pada filter Chebysev:
(
)
(
)
[
]
s
n
Ω
= −1 /−101 /10
cosh
10 / 10
cosh αmin αmax
(2.13)
3. Jika n telah diketahui maka selanjutnya adalah menetukan kutub-kutub yang
diperlukan untuk perhitungan, dengan a adalah:
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = − ε 1 sinh 1 1 n
a (2.14)
Dengan mensubstitusikan persamaan (2.14) ke persamaan (2.15) dan (2.16),
maka akan dapat diperhitungkan nilai-nilai kutubnya (αmax dan β).
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅ ± = π σ n k a k 2 1 2 sin ) (
sinh (2.15)
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅ = π ω n k a k 2 1 2 cos )
cosh( (2.16)
Dengan k = 1,2,..k atau dapat dilihat pada tabel 2.2.
Tabel 2.2 Chebysev Pole Locations [3]
αmax = 0.5dB αmax = 1dB αmax = 2dB αmax =3dB
N
α β α Β α Β α Β
1 2.8628 0 1.9652 0 1.3076 0 1.0024 0
2 0.7129 1.004 0.5489 0.8951 0.4019 0.8133 0.3224 0.7772
0.3132 1.0219 2.2471 0.966 0.1845 0.9231 0.1493 0.9038 3
0.6265 0 0.4942 0 0.3689 0 0.2986 0
0.1754 1.0163 0.1395 0.9834 0.1049 0.958 0.958 0.0852 4
0.4233 0.4209 0.3369 0.4073 0.2532 0.3968 0.2056 0.392
0.2829 0.2702 0.2321 0.2662 0.1753 0.2630 0.1427 0.2616
4. Aplikasikan algoritma Geffe dan terapkan lokasi dari pole untuk band pass
filter, algoritma Geffee merupakan prosedur yang dipergunakan untuk
mencari frekuensi aktual dari pole dan zero yang telah ditemukan [3].
Dengan
BW fo
qc = dan
1 ∑ = qc
Q
Kemudian gunakan algoritma Geffe sebagai berikut:
2 2 2 2 +Ω
∑ =
C (2.17)
c
q
D= 2∑2 (2.18)
2
4
c
q C
E = + (2.19)
2 2
4D E
G = − (2.20)
) (
2 / 1
1 2
G E D
Q= + (2.21)
c
q Q E
K = 2 (2.22)
1
2 −
+
= K K
W (2.23)
Hasil akhirnya akan diperoleh :
fo1 = W.f0 dan fo
W
fo2 = 1 (2.24)
Fo1 dan fo2 merupakan frekuensi pusat aktual pada lainnya selain frekuensi
pusat.
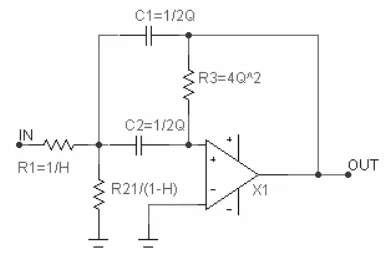
5. Tiap-tiap stage dari band pass mempunyai bentuk rangkaian yang sama, tetapi
Gambar 2.14. Rangkaian Tiap Stage BPF
Digunakan untuk menentukan nilai komponen R1 dan R2 ternormalisasi:
(
)
(
)
(
)
12 0 0 2 2 1 / . . . 2 ) ( Q Q j T i i ω ω ω ω ω ω ω + −
= (2.25)
) ( 1
1 T jω
H
R = = (2.26)
(
)
⎟⎟⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = − = 1 ) ( ) ( 1 1 2 ω ω j T j T HR (2.27)
Q C
C1= 2= 1 (2.28)
(2.29) 2 . 4 3 Q R =
6. Tiap pasangan pole dan satu zero digunakan untuk sebuah stage dari
rangakaian filter dan tiap-tiap stage tersebut dikaskadekan dan menentukan
harga-harga komponen yang ada di pasaran. Cara menentukan harga
komponen yaitu semua komponen bernilai 1, kemudian menentukan kf dan
km sehingga diperoleh nilai real.
2.3.
Penguat Operasional Sebagai Pembangun Dasar
2.3.1
Dasar-Dasar Penguat Operasional
Istilah penguat operasional atau Op-Amp awalnya dikenal dalam bidang
elektronika analog dan biasanya digunakan untuk operasi-operasi aritmatika
Gambar 2.15. Simbol Op-Amp Dalam Rangkaian
karakteristik ideal yang dimiliki adalah sebagai berikut :
1. Lebar pita yang tak berhingga (infinite bandwidth).
2. Impedansi masukan yang tak berhingga (infinite input impedance).
3. Impedansi keluaran sama dengan nol (zero output impedance)
Dari gambar 2.15 terlihat bahwa Op-Amp memiliki dua masukan, yaitu
masukan positif (+) dan masukan negatif (-). Biasanya Op-amp diberi catu daya
dengan polaritas ganda atau bipolar dalam jangkauan ± 5 volt hingga ± 15 volt.
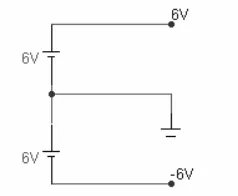
Untuk keperluan eksperimen yang murah, kita dapat membuat catu daya bipolar
sederhana seperti ditunjukkan pada gambar 2.16.
Gambar 2.16. Catu Daya Bipolar Sederhana
Seperti telah disebutkan sebelumnya, Op-Amp memiliki dua masukan.
Perbedaan antara keduanya adalah sebagai berikut :
1. Jika sinyal melalui masukan positif (+), maka keluaran yang dihasilkan adalah
sefase dengan masukan. Atau dapat dikatakan, jika masukan positif maka
Gambar 2.17. Sinyal pada Masukan Positif
2. Jika sinyal melalui masukan negatif (-), maka keluaran yang dihasilkan adalah
berbeda fase 180º atau setengah siklus. Atau dapat dikatakan, jika sinyal
masukan positif maka keluaran yang dihasilkan menjadi negatif. Hal ini
diperlihatkan pada gambar 2.18.
Gambar 2.18. Sinyal pada Masukan Negatif
Selanjutnya pada pembahasan-pembahasan berikutnya, rangkaian Op-Amp
yang digunakan dalam filter aktif selalu berbentuk atau menggunakan umpan
balik eksternal yang berguna untuk menstabilkan karakteristik Op-Amp itu sendiri.
2.3.2.
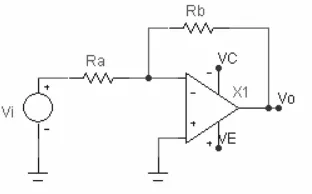
Penguat Pembalik (
Inverting Amplifier
)
Rangkaian penguat inverting ditunjukkan pada gambar 2.19.
i a b
o V
R
V =− (2.30)
Sehingga penguatan tegangan atau perbandingan tegangan keluaran terhadap
tegangan masukan dapat dituliskan sebagai :
a b
i o
R R V
V −
= (2.31)
Dengan demikian, penguatan tegangan bisa kurang dari 1, sama dengan 1
(unity) atau lebih dari 1. Biasanya Ra = 1KΩ, karena impedansi masukan penguat
inverting tersebut sama dengan Ra.
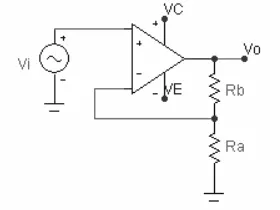
2.3.3.
Penguat tidak membalik (
Noninverting Amplifier
)
Rangkaian penguat non inverting ditunjukkan pada gambar 2.20.
Gambar 2.20 Rangkaian Penguat Noninverting
Persamaan yang dapat dituliskan dari gambar di atas, yaitu :
i a b
o V
R R
V ⎟⎟
⎠ ⎞ ⎜⎜
⎝ ⎛
+
= 1 (2.32)
Sedangkan persamaan yang menentukan penguatan tegangan adalah :
a b
i o
R R V
V +
Berbeda dengan penguat inverting, pada penguat noninverting penguatan
tegangan selalu lebih besar dari 1. Perbedaan ini terlihat pada persamaan (2.31)
dan (2.33).
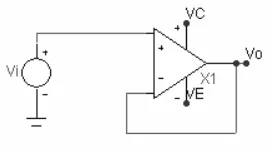
2.3.4.
Pengikut Tegangan (
Voltage Follower
)
Pengikut tegangan kadang-kadang disebut sebagai penyangga atau buffer
dan memiliki fungsi yang sama seperti pengikut emiter (emitter follower) atau
pengikut katoda. Ciri-ciri yang dimiliki, yaitu :
1. Memiliki impedansi masukan yang sangat tinggi (lebih dari 100kΩ).
2. Memiliki impedansi keluaran yang sangat rendah (kurang dari 75Ω).
Gambar 2.21 menunjukkan rangkaian pengikut tegangan.
Gambar 2.21. Rangkaian Pengikut Tegangan
Jika dibandingkan dengan rangkaian penguat non inverting, pada
rangkaian pengikut tegangan, Ra = ∞ dan Rb = 0. Dengan demikian, penguatan
tegangan selalu = 1.
1
=
i o
V V
(2.34)
Sehingga dapat diketahui bahwa sinyal keluaran sama persis (identik) dengan
sinyal masukan atau keluaran mengikuti masukan. Fungsi utama dari rangkaian
ini adalah sebagai penyangga atau mengisolasi beban dari sumber. Sebagai
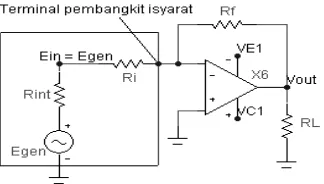
contoh, gambar 2.22 menunjukkan suatu penguat inverting tanpa pengikut
Gambar 2.22. Rangkaian Penguat Inverting Tanpa Pengikut Tegangan
Berdasarkan gambar 2.22, apabila sumber impedansi tinggi dihubungkan
ke sebuah penguat inverting, penguatan tegangan dari Vout ke Egen tidak ditentukan
oleh Rf dan Ri, seperti pada persamaan yang umum untuk penguat inverting.
Penguatan yang sesungguhnya harus meliputi Rint, sehingga persamaan untuk
gambar 2.22 menjadi :
int
R R
R
E V
i f
gen out
+ −
= (2.35)
Hal tersebut memperlihatkan bahwa Egen terbagi antara Rint dan Ri sehingga
tegangan masukan Ein menjadi kecil.
gen i i
in xE
R R
R E
+ =
int
(2.36)
Untuk mengatasi hal tersebut, sangat diperlukan penggunaan pengikut
tegangan sebagai penyangga sebelum dihubungkan ke masukan Op-Amp.
Pengikut tegangan digunakan apabila tahanan masukan (Rint) dari suatu rangkaian
pembangkit sangat besar sehingga arus yang dialirkan dari sebuah sumber
diabaikan.
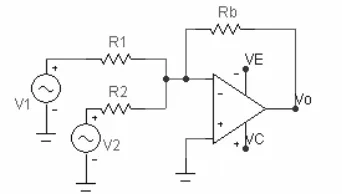
2.3.5.
Penguat Penjumlah (
Summing Amplifier
)
Rangkaian penguat penjumlah dapat menjumlahkan dua atau lebih
masukan-masukan bebas. Gambar 2.23 menunjukkan rangkaian untuk penguat
Gambar 2.23. Rangkaian Penguat Penjumlah
Penguatan tegangan untuk masing-masing masukan, yaitu :
1 1
1
R R V
V
A o b
v = =− (2.37)
2 2
2
R R V
V
Av = o =− b (2.38)
Tegangan keluaran yang diperoleh :
⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
+ −
= 2
2 1 1
V R R V R R
Vo b b (2.39)
Jika diketahui sinyal masukkan :
V1 = A1sin(ω1t)
V2 = A2sin(ω2t)
Maka
Vo = A1sin(ω1t) + A2sin (ω2t) (2.40)
Untuk A1 = A2 sehingga :
Vo = A(sin(ω1t) + sin(ω2t)) (2.41)
2.3.6.
Integrator
Integrator Op-Amp dibentuk dengan cara mengganti resistor umpan balik
dari rangkaian penguat inverting dengan sebuah kapasitor. Gambar 2.24
Gambar 2.24. Rangkaian Integrator Op-Amp
Berdasarkan gambar 2.24, sinyal masukan diintegralkan dan sekaligus
menyatakan “luasan di bawah kurva”. Penguatan tegangan yang dihasilkan, yaitu ;
=−
∫
t i a
v V dt
C R A
0
. 1
(2.42)
Bentuk C Ra.
1
harus sesuai dengan masukan frekuensi minimum yang diharapkan:
min
2 1 .
f C Ra
π
= (2.43)
Karena integrator juga bereaksi terhadap sembarang tegangan offset resultant
keluaran (berkaitan dengan offset arus bias Op-amp), sebuah resistor (Ra) sering
diletakkan antara masukan positif dengan ground untuk meminimalkan offset ini.
Gambar 2.25 menunjukkan rangkaian yang menggunakan resistor untuk
meminimalkan offset error.
Gambar 2.25. Rangkaian yang Menggunakan Resistor Untuk Meminimalkan Offset Error
Efek offset dapat melibatkan tegangan maupun arus, dan dapat terjadi
secara internal maupun eksternal terhadap Op-Amp itu sendiri. Suatu arus atau
masukan yang nol. Biasanya, Op-amp itu sendiri memiliki offset yang telah
disesuaikan hingga beberapa milivolt mengacu pada masukan. Beberapa Op-Amp
memiliki kaki-kaki tambahan pada kemasannya yang memperbolehkan kita untuk
mengatur offset ke suatu nilai minimum. Bagaimanapun juga, walaupun offset
sudah diminimalkan, masih ada ketergantungan pada temperatur, sehingga
harapan terbaik biasanya hanya untuk beberapa ratus milivolt offset saja. Offset
terjadi pada saat arus bias masukan mengakibatkan penurunan tegangan yang
melalui hambatan masukan. Jika penurunan tegangan pada masukan (+) dan (-)
dapat dibuat sama atau identik, maka offset tersebut dapat dihilangkan.
2.4.
Frequency to Voltage Converter
Pengubah frekuensi ke tegangan menghasilkan keluaran berupa tegangan.
Amplitudo keluaran merupakan fungsi dari frekuensi sinyal masukan. Kurva
karakteristik ideal perubahan pada pengubah frekuensi ke tegangan berupa kurva
linier seperti pada gambar 2.26.
Tegangan keluaran
Deviasi frekuensi masukkan
Gambar2.26. Karakteristik Ideal Pengubah Frekuensi ke Tegangan [4].
Pada sistem ini digunakan IC LM 2907N sebagai pengubah frekuensi ke
tegangan. IC ini merupakan op-amp/komparator dengan gain yang besar, karena
didesain untuk mengoperasikan relay, lampu, atau beban yang lain saat frekuensi
masukannya mempunyai jangkauan yang melebihi batas yang telah dipilih.
sentuh, dan lain-lain.
Gambar 2.27. Diagram Blok LM 2907 M
Mengacu pada data sheet IC LM2907N untuk menentukan besarnya tegangan
keluaran adalah:
Vo = Vcc×fin×R1×C1 (2.44)
Besarnya C1 > 500pf
Besarnya C2 bergantung pada jumlah ripel tegangan dan diperlukan response
time.
2.5.
Sensor Suhu
Untuk transduser secara khusus sudah tersedia dalam bentuk bahan
semikonduktor dengan bentuk fisik seperti transistor dengan tiga buah kaki.
Kemampuan bahan semikonduktor ini mempunyai jangkauan pengukuran yang
lebar, dan mempunyai sifat yang benar-benar linier antara perubahan suhu yang
diterima dengan tegangan keluaran yang dihasilkan. Contohnya adalah
semikonduktor terintegrasi berupa IC LM 35 dan LM 335.
Telemetri yang dibuat menggunakan semikonduktor terintegrasi berupa
IC LM 335. Perubahan nilai tegangan keluaran adalah sebesar 10 mV per derajat
Gambar 2.28. Bentuk IC LM 335
LM 335 berupa semikonduktor yang secara fisik bentuknya sama dengan
transistror tiga kaki. Dilihat dari bawah dengan bidang yang mendatar berada di
atas maka dapat ditentukan kaki-kakinya. Kaki pertama merupakan kaki adj, kaki
kedua adalah kaki anoda, dan kaki ketiga adalah kaki katoda. IC LM 335
sebenarnya adalah dioda zener yang stabil. Oleh karena itu penerapannya dalam
untai elektronis sama dengan dioda, secara sederhana untainya digambarkan pada
gambar 2.29.
Gambar 2.29. Sensor Suhu Sederhana Tanpa Kalibrasi
Berikut ini adalah beberapa karakteristik dari LM 335 yang mendukung
pembuatan perangkat suhu ini :
1. LM 335 mempuyai perubahan pada keluaran sebesar 10 mV per
derajat pada komponen diberi catu daya maka sensor ini akan bekerja
sebagai sensor suhu yang bersifat linier.
2. Mempunyai jangkauan pengukuran suhu yang besar, dari - 40o sampai
100oC.
VLM335 = Temperatur ×10 mV/ oK (2.45)
K mV/ 10
V Temperatur
o LM335
= (2.46)
Apabila pada suhu 0oC = 273 oK, maka tegangan keluaran LM 335 sebesar
VLM335 = 273oK × 10mV/oK (2.47)
VLM335 = 2,73 Volt
Untuk suhu 100oC maka maka VLM335 = 3,73 volt.
Berdasarkan gambar 2.29, besarnya arus (Is) dapat dihitung dengan persamaan :
335 S
I
LM S r
R Vcc +
= (2.48)
Karena Rs >> rLM335 maka dapat dianggap RS + rLM335 ≈ Rs sehingga Is dapat
dihitung,
S S
R Vcc
I = (2.49):
2.6.
Voltage Controlled Oscillator
(VCO)
Sebuah osilator terkendali tegangan (VCO) adalah sebuah rangkaian yang
dapat menghasilkan sinyal keluaran yang bervariasi (tipe gelombang kotak, dan
tipe gelombang gergaji) dengan daerah frekuensinya dikendalikan oleh tegangan
DC.
VCO dalam sistem ini dirancang dengan menggunakan IC MC 14046B.
Sinyal keluaran dari VCO dengan daerah frekuensinya ditentukan oleh tegangan
input VCOin dan kapasitor dan resistor yang terhubung dengan pin C1A, C1B, R1,
(a) (b)
Gambar 2.30. (a) Diagram Blok VCO dan (B) Bentuk Fisik IC VCO
Tabel 2.3 berisi tentang data percobaan karakteristik IC MC14046B untuk
sensor I [5]. Dengan nilai komponen yang digunakan pada percobaan adalah R1 =
10 KΩ, R2 = 1 MΩ, C = 10 nF, VDD = 5 V.
Tabel 2.3. Karakteristik IC MC14046B VCOin
(Volt)
VCOout
(kHz)
0,2 0,13
1,24 0,24
1,97 0,54
2,23 2,03
2,86 4,06
3,2 5,18
3,42 6,02
4,95 10,43
Sedangkan untuk sensor II, data hasil percobaan karakteristik IC MC14046B
dengan menggunakan nilai komponen pada percobaan adalah R1 = 56 KΩ, R2 = 1
MΩ, C = 1 nF, VDD = 5 V dapat dilihat pada tabel 2.4 [5].
Tabel 2.4. Percobaan Karakteristik IC MC14046B VCOin
(Volt)
VCOout
2,86 10,11
2,99 11,03
4,1 15,7
4,95 24,5
Dengan nilai komponen yang digunakan pada percobaan adalah R1 = 56 KΩ, R2
= 1 MΩ, C = 1 nF, VDD = 5 V.
Dari data sheet IC MC 14046B dapat ditentukan besarnya nilai R1, R2, dan C1
dengan persamaan frekuensi keluaran dari VCO:
Untuk fmin di mana VCOin = VSS
) 32 (
1
1 2 min
pF C
R f
+
= (2.50)
Untuk fmax di mana VCOin = VDD
min 1
1 max
) 32 (
1
f pF C
R
f +
+
= (2.51)
2.7.
Pemancar FM
2.7.1. Pemancar FM Mono
Pemancar FM mono adalah pemancar yang hanya mengirimkan isyarat
bidang dasar saja ke radio penerima. Sumber asli gelombang bidang dasar dapat
dianggap sebagai sebuah masukkan dan bila dipakai lebih dari satu masukkan,
maka keluarannya adalah tunggal atau merupakan gabungan untuk isyarat suara
bidang dasar tunggal.
Pemancar FM mono biasa dibangkitkan dengan osilator saja tanpa
menggunakan PLL karena osilator LC sangat rentan terhadap perubahan
frekuensi, artinya osilator tersebut mudah bergeser frekuensinya atau tidak stabil.
Satu-satunya keuntungan osilator LC adalah frekuensinya dapat diubah-ubah
sesuai keinginan walaupun perubahannya terbatas. Osilator yang dijamin sangat
stabil adalah osilator kristal, yaitu osilator yang menggunakan kristal sebagai
sumber frekuensi. Namun demikian, osilator ini tidak dapat diubah-ubah
frekuensinya seperti pada osilator LC. Bila ingin merubah frekuensi maka
kristalnya harus diubah dengan frekuensi yang sesuai, hal ini kurang praktis, dan
memerlukan biaya yang lebih besar.
2.7.2.
Pemancar FM Stereo
FM stereo adalah suatu sistem modulasi yang dapat mengirimkan isyarat
audio stereo. Pemancar FM stereo terdiri dari stereo generator atau juga disebut
multiplexing. Kedua kanal audio stereo dimasukkan dalam suatu matrik yang akan
menghasilkan dua buah isyarat keluaran, yaitu isyarat audio kanal kanan dijumlah
dengan audio kanal kiri (L + R) dan isyarat audio kanal kanan dikurangi audio
kanal kiri (L – R).Isyarat L + R dimodulasi dengan cara FM mono, sehingga
penerima FM mono dapat menerima isyarat ini. Pada sistem pemancar FM stereo
ini akan terjadi pergeseran frekuensi, karena isyarat L + R dan isyarat L – R tidak
boleh berada pada frekuensi yang sama dan disebut sebagai multiplek
(multiplexing). Diagaram blok pemancar FM dapat dilihat pada gambar 2.31.
antena
Penguat akhir
Osilator RF Penguat
Driver
Modulator FM Penguat
Buffer
Line In
banyak dijual di pasaran, yang merupakan suatu penala radio FM. Sebuah
penerima FM stereo terdiri dari rangkaian penguat RF, pencampur, osilator lokal,
penguat IF, dan AFC. Penguat RF digunakan untuk memperbaiki S/N rasio
memperbaiki selektivitas RF dan menindas pancaran kembali dari osilator lokal.
Pencampur digunakan untuk menghasilkan frekuensi penjumlah atau selisih
dengan mengubah sinyal RF yang datang menjadi frekuensi antara yang lebih
rendah. Osilator lokal memberi sinyal yang bertaut dengan sinyal RF yang datang
dalam pencampur untuk menghasilkan sinyal frekuensi antara.
Penguat IF digunakan untuk memberikan penguatan atau gain yang
terbesar antara terminal antena dan detektor. Penguat ini mempunyai jaringan
antar tingkat atau filter-filter yang dirancang untuk menolak sinyal-sinyal dari
saluran yang berdekatan dan mungkin juga datang dari pencampur. AFC
(Automatic Frequency control) digunakan pada penerima FM untuk lebih
menstabilkan penerimaan dari penguat RF FM. AFC terdiri dari pencampur,
penguat IF, tegangan koreksi, osilator, dan detektor. Diagram blok penerima FM
dapat dilihat pada gambar 2.32 [6].
speaker Penguat
RF Mixer
AGC Osilator
lokal
AGC Penguat
IF
Detekto r FM
Pengali Penguat Audio penutuh
antena
RANCANGAN PENELITIAN
3.1.
Bagian Pengirim
3.1.1. Sensor Suhu Elektronis LM 335
Sensor suhu ini menggunakan IC LM 335 dengan untai terkalibrasi
gambar 3.1. Untai kalibrasi pada suhu 27oC maka tegangan keluaran yang
dihasilkan sebesar 3,00 volt dengan mengubah nilai pada potensiometer Rk.
Hambatan Rs berfungsi untuk membatasi arus yang mengalir pada IC LM 335 (IS
= arus sensor).
Gambar 3.1. Untai Terkalibrasi LM 335
Sehingga besarnya arus dapat dihitung dengan persamaan 2.49:
S S
R Vcc
I =
Vcc sebesar 12 volt dan nilai Rs sebesar 10 kΩ maka:
3
10 10
12 × =
S
I
yang terjadi.
3.1.2.
Penyangga
Sistem ini menggunakan op-amp dengan seri LM1458 sebagai penyangga
seperti terdapat dalam gambar 3.2. Pada rangkaian penyangga atau buffer
tegangan keluaran sama dengan tegangan masukan, dengan demikian
penguatannya selalu sama dengan 1. Dengan impedansi masukan yang tinggi dan
impedansi keluaran yang rendah maka arus beban dapat menjadi lebih besar
daripada arus masukan pada penyangga sehingga tegangan masukan pada
penyangga tidak mengalami penurunan pada saat dihubungkan dengan piranti
lainnya atau mengisolasi beban (load) keluaran dari sumber (source) masukan.
Gambar 3.2. Buffer
3.1.3.
Osilator Terkendali Tegangan (VCO)
Osilator terkendali tegangan yang diperlukan dalam sistem ini berjumlah
dua buah sesuai dengan jumlah sensor yang ada. VCO ini dirancang dengan
menggunakan 2 buah IC MC14046B yang akan mengubah tegangan hasil dari
frekuensi operasi yang diinginkan adalah 2 kHz – 6 kHz untuk sensor pertama
dan 7 kHz –11 kHz untuk sensor kedua.
1. Sensor pertama
VCO dirancang dengan frekuensi maksimum = 6 KHz, frekuensi
minimum = 2 kHz. Dari data percobaan karakterisitik IC MC14046B pada
tabel 2.3 diperoleh tegangan masukan pada VCO (VCOin) = 2,23V–3,42V
untuk frekuensi 2,03 kHz–6,02 kHz. Mengacu pada persamaan (2.50) dan
2.51) dari data sheet IC MC14046B diperoleh :
) 32 ( R 1 = f 1 2 min pF
C + untuk VCOin = 0 V
) 10 32 10 01 , 0 ( 10 1 1 =
fmin 6 −6 −12
× + × ×
fmin = 99,7 Hz
sedangkan fmax adalah :
min 12 1 max ) 10 32 ( R1 1 = f f
C + × − + untuk VCOin = 5 V
Hz 7 , 99 ) 10 32 10 01 , 0 ( 10 1 1 =
fmax 6 6 12 +
× + ×
× − −
fmax = 9,68 kHz
Sehingga hasil rancangan VCO untuk sensor yang pertama ditunjukkan dalam
gambar 3.3.
kHz untuk frekuensi 7,01 kHz −11,03 kHz seperti pada tabel 2.3.
Maka berdasarkan persamaan (2.50) dan 2.51) dari data sheet IC MC14046B
diperoleh : ) 10 32 ( R 1 = f 12 1 2
min + × −
C untuk VCOin = 0 V
) 10 32 10 001 , 0 ( 10 1 1 =
fmin 6 −6 −12
× + × ×
fmin = 968,9 Hz
sedangkan fmax adalah :
min 12 1 1 max ) 10 32 ( R 1 = f f
C + × − + untuk VCOin = 5 V
Hz 9 , 968 ) 10 32 10 001 , 0 ( 10 56 1 =
fmax 3 6 12 +
× + ×
× − −
fmax = 20,56 kHz
Sehingga hasil perancangan VCO untuk sensor kedua ditunjukkan dalam
gambar 3.4.
3.1.4.
Pengkondisi Sinyal
Pengkondisi sinyal dirancang dengan menggunakan penguat operasional
(opamp). Pengkondisi sinyal ini diharapkan mampu mengkondisikan sinyal yang
keluar dari sensor sebagai masukan bagi osilator terkendali tegangan.
Dalam perancangan pengkondisi sinyal ini tegangan kendali pada VCO
untuk sensor I dan II diperoleh dari percobaan karakteristik IC MC14046B.
1. Sensor I
Keluaran tegangan sensor sebesar 3V–3,73V akan dikondisikan untuk
frekuensi keluaran dari VCO fO = 2 KHz −6 KHz dengan tegangan kendali
pada VCO yang terdapat pada tabel 2.2 adalah 2,23V −3,42V.
Dan keluaran tegangan sensor sebesar 3V−3,73V dikondisikan untuk
frekuensi keluaran dari VCO fO = 7 KHz −11 KHz dengan tegangan kendali
pada VCO adalah 2,40V–2,99V.
Tabel 3.1. Pengkondisi Sinyal Sensor I Vin Pengondisi Vout Pengondisi
3 V 2,23 V
3,73 V 3,42 V
Sehingga dapat ditentukan persamaan untuk pengkondisi sinyal tersebut
Vout = a.Vin + Voffset
Dengan menggunakan persamaan matematika
1 2 1 1 2 1 Y Y Y Y X X X X − − = − − 23 , 2 42 , 3 23 , 2 3 73 , 3 3 − − = − − Y X 19 , 1 23 , 2 73 , 0 3 − = − Y X
0,73 Y- 1,63 =1,19 X -3,57
0,73 Y =1,19X -1,94
1. Bagian inverting
Persamaan dari penguat inverting (2.30.) adalah:
Vin Ri Rf Vo ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − =
Dari persamaan pengkondisi sinyal , maka:
Vin Ri Rf Vo ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ −
= = 1,63 × Vin
Rf = 1,63 Ri
Sehingga jika diambil harga nilai Rf = 3,3 kΩ, maka besarnya nilai Ri =
62 kΩ.
2. Bagian penentuan offset
) ( 1 2 2 V R R R Voffset ×
+
=
Voffset = -2,66 V dan (-V) = 12V
V R R R V 12 66 , 2 1 2 2 × + = 1 2 2 12 66 , 2 R R R V V + =
12 R2 -2,66 R2 =2,66 R1
9,34 R2 =2,66 R1
R2 =3,5 R1
Jika Diambil R1 = 1,8 kΩ, maka R1 = 6,3 kΩ
Sehingga rangkaian penguat penjumlah dari pengkondisi sinyal untuk
Gambar 3.5. Pengkondisi Sinyal Sensor I
2. Sensor II
Keluaran tegangan sensor sebesar 3V−3,73V harus dikondisikan untuk
frekuensi keluaran dari VCO fo = 7 KHz dengan tegangan kendali pada VCO
yang terdapat pada tabel 2.3 adalah 2,40 V − 2,99 V.
Tabel 3.2. Pengkondisi sinyal sensor II Vin Pengondisi Vout Pengondisi
3 V 2,40 V
3,73 V 2,99 V
Sehingga dapat ditentukan untuk persamaan untuk pengkondisi sinyal tersebut
Vout = a.Vin + Voffset
Dengan persamaan matematika :
1 2
1
1 2
1
Y Y
Y Y X X
X X
− − = − −
99 , 2 40 , 2
40 , 2 3
73 , 3
3
− − = −
− Y
Y = 0,808 X – 0,027
Sehingga didapatkan persamaan untuk pengkondisi sinyal untuk sensor II:
Vout = 0,808 × Vin -0,027
Dari persamaan Vout, maka persamaan pengkondisi sinyal yang akan
digunakan dalam sistem adalah rangkaian penguat penjumlah.
1. Bagian inverting
Persamaan dari penguat inverting (2.30) adalah:
Vin Ri Rf Vo ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − =
Dari persamaan pengkondisi sinyal, maka:
Vin Ri Rf Vo ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ −
= = 0,808 × Vin
Rf = 0,808 Ri
Sehingga jika diambil harga nilai Rf = 5,4 kΩ, maka besarnya nilai Ri =
6,8 kΩ.
2. Bagian penentuan offset
) ( 1 2 2 V R R R Voffset ×
+ =
Voffset = -0,03 V dan (-V) = -12V
V R R R V 12 03 , 0 1 2 2 × + = 1 2 2 12 03 , 0 R R R V V + =
12 R2 -0,03 R2 = 0,03 R1
11,97 R2 = 0,03 R1
Jika Diambil R2 = 2 kΩ, maka R1 = 800 kΩ
Digunakan resistor Rpot = 1 MΩ dan diatur supaya keluaran dari pembagi
tegangan sebesar -0,03 Volt. Sehingga rangkaian penguat penjumlah dari
pengkondisi sinyal untuk sensor II adalah:
Gambar 3.6. Pengkondisi Sinyal Sensor II
3.1.5.
Penguat Penjumlah
Penguat penjumlah dalam sistem ini digunakan untuk menggabungkan
beberapa sinyal masukan menjadi satu sinyal keluaran, penguat penjumlah
dirancang dengan menggunakan op-amp IC 741. Dalam sistem ini digunakan
penguat penjumlah secara langsung. Sinyal keluaran AC dari VCO sensor I dan
sensor II digabungkan sehingga dihasilkan satu sinyal keluaran sebelum
dipancarkan oleh pemancar FM.
Berdasarkan persamaan (2.30) dapat ditentukan besarnya RB, R1, dan R2
agar level tegangan pada keluaran penguat penjumlah masih dapat dipancarkan
oleh pemancar FM. Diketahui dari data sheet IC MC14046B besarnya frekuensi
VCOout jika VCOin = VDD
2 1
.
Di mana VDD= 5 Volt jadi diambil VCOout = 2,5 Volt
Dengan Vi1 adalah Vout VCO pada sensor I = 2,5 sin(ω1t)
Dengan Vi2 adalah Vout VCO pada sensor II = 2,5 sin(ω2t)
Besarnya nilai kapasitor–kapasitor dari penguat penjumlah AC dapat ditentukan
dengan persamaan (2.6):
C fc R
× × =
π 2
1
Untuk sensor I dengan frekuensi = 6 KHz dengan nilai C = 0,47 μF.
) 10 47 , 0 ( ) 10 6 ( 2
1
6
3 × × −
× × =
π
R
R = 56 Ω
Untuk sensor II dengan frekuensi = 7 KHz
) 10 47 , 0 ( ) 10 7 ( 2
1
6
3 × × −
× × =
π
R
R = 48 Ω
Gambar rancangan penguat penjumlah dapat ditunjukkan pada gambar 3.7.
Gambar 3.7. Rangkaian Penjumlah
3.1.6.
Pemancar FM
Pada perancangan, pemancar FM tidak dibahas secara perhitungan, akan
tetapi pada penelitian ini, penulis menggunakan pemancar dan penerima FM yang
sudah ada di pasaran. Pemancar yang digunakan di dalam perancangan ini
merupakan produk dari SIEMCOR ELECTRONIC INDUSTRIES dengan tipe
3.2.
Bagian Penerima
3.2.1. Penerima FM
Penerima FM tidak dibahas secara perhitungan, akan tetapi pada
penelitian ini, penulis menggunakan pemancar dan penerima FM yang sudah ada
di pasaran. Penerima FM yang digunakan pada perancangan ini merupakan
produk dari SIEMCOR ELECTRONIC INDUSTRIES dengan tipe Ronica
SC-709. Penerima ini ditala pada frekuensi 90 MHz sesuai dengan frekuensi
pengirim.
3.2.2.
Filter Aktif
3.2.2.1
Filter Pelewat Bawah dengan fc =11 KHz
Rangkaian filter pelewat bawah yang dirancang pada sistem ini adalah
rangkaian filter pelewat rendah dengan orde VI, rangkaian ini tersusun dengan
menggabungkan tiga macam penapis orde II yang berbeda-beda dengan
menggunakan konsep “komponen sama”. Rangkaian ini dirancang untuk
memisahkan sinyal keluaran dari penerima FM sehingga sinyal-sinyal tersebut
terpisah dalam frekuensi tertentu untuk membedakan sinyal dari VCO I dan VCO
II. Rangkaian ini dirancang dengan frekuensi cutoff = 11 KHz sehingga dapat
ditentukan nilai dari R1 = R2 dan C3 = C4 berdasarkan persamaan (2.6) adalah:
RC fc
π 2
1 =
Diambil nilai C = 0,0047 μF
) 10 0047 , 0 ( 11000 2
1
6
−
× ×
× =
π
R
R = 3 kΩ
Faktor redaman (α) dapat ditentukan besarnya nilai untuk RA dan RB adalah:
1. Bagian pertama
α = 1,932
α
− =2
A B
α =1,414
586 , 0
=
A B
R R
Diambil nilai RA = 3,3 kΩ dan RB = 2 kΩ.
3. Bagian ketiga
α = 0,518
482 , 1
=
A B
R R
Diambil nilai RA = 5,6 kΩ dan RB = 8,3 kΩ.
Sehingga diperoleh hasil perancangan untuk Low Pass Filter orde 6 seperti
ditunjukkan dalam gambar 3.8.
Gambar 3.8.Low Pass Filter 11 KHz
3.2.3.
Band Pass Filter
(BPF) CHEBYCHEV
Pada perancangan BPF Chebychev, Langkah pertama kali dalam
merancang BPF adalah menetapakan batas–batas frekuensi dan batas tanggapan
amplitudo yang digunakan pada gambar 3.3c. Frekuensi pusat BPF yang
Gambar 3.9. Tanggapan BPF Orde 3
a. Perancangan untuk f = 2KHz-6 KHz orde 3
1. Tetapkan batas-batas untuk 4 frekuensi ω1,ω ω ω2, 3, 4 dan batas antara
stopband dan pass band αmax,αmin. αmax =0.5dB,αmin=4,5dB dan
untuk batas frekuensinya
kHz kHz
kHz
kHz, 6 , 1,5 , 6.5
2 2 3 4
1 = ω = ω = ω =
ω . Kemudian tetapkan low
pass eqivalent ke band pass filter, yang berarti harus menghitung dan
dengan menggunakan persamaan 2.12, maka:
p
Ω
s
Ω
=1 dan =
p
Ω Ωs
1 2 3 4 ω ω ω ω − − ; 25 , 1 2 6 5 . 1 5 . 6 = − − = Ωs
2. Menghitung n dan Ω , n merupakan derajat kecuraman dari fungsi filter
Chebyshev: 0 = − − = − − 25 . 1 cosh )] 1 10 /( ) 1 10 [( cosh 1 10 / 5 . 0 10 / 5 , 4 1 n 2,92
sehingga nilai pembulatan n = 3
radius dari filter Chebyshev adalah:
2 / 1 10 / ) 1 10
( max − −
= α
ε
2.8628
= −
= 0.5/10 −1/2
) 1 10
π ω n k a 2 1 2 cos cosh 1 + = π 1 2 1 1 2 cos 5914 . 0 cosh ⋅ + ⋅ = =0.6265 π σ n k a 2 1 2 sin sinh 3 , 2 + ±
= 1.022
3 2 1 2 2 sin 5914 . 0 sinh = ⋅ + ⋅ ± = π π ω n k a 2 1 2 cos cosh 3 , 2 +
= 0.3132
3 2 1 2 2 cos 5814 . 0 cosh = ⋅ + ⋅ = π
nilai-nilai ini berlaku untuk n = 3 pada semua perancangan, sehingga
semua nilai-nilai pole dan zero pada perancangan ini adalah:
022 . 1 3132 . 0 , 2
1 p j
p =− ±
6265 . 0
0 =−
p , (pada perancangan ini, p0=Σ1)
4. Aplikasikan algoritma Geffe dan tetapkan lokasi dari pole untuk bandpass
filter.
dengan
BW f
qc = 0 = 0.866
dan
1 Σ = qc
Q = 1.38
6265 . 0 866 . 0 =
Kemudian gunakan algoritma Geffe sebagai berikut:
2 2 2 2 +Ω Σ =
C
=0.31322 +1.0222= 1.1426
C
q
D= 2Σ2 = 0,7233
866 . 0 3132 , 0 2 = ⋅ 2 4 C q C
E= + =
2 866 , 0 426 , 1
4+ = 5,5235
2 2
4D
E
G = − = 5,902 −4⋅0,72332 = 5.33
) ( 1
2
1 E G
D
Q= + =
(
5,90 5,719)
3,227233 , 0
1
2
qc Q
K = ∑2 = ⋅ =
866 , 0
3,33 3132 , 0
1,164
1
2 − +