SIMULASI KERAN OTOMATIS PADA BAK MANDI BERBASIS ATMEGA16
Yulius Leki
1, Taman Ginting
2 1STMIK AUB Surakarta,2Poltek Pratama Mulia
ABSTRACT
Water is needed for life to various activities such as drinking, cooking, washing, bathing and other activities. Humans use water from various water sources, one of which supplied water from the taps, in other words, anyone who uses the water will have to pay according to how large the volume of water used. But in some cases when using the water from the faucet taps people forget to turn off the water faucet so that the water continues to flow and cause wastage of water so the waters rising bills. A simulation of an automatic faucet on the tub has been made. The designed system consists of hardware and software, hardware comprises 16 ATMega microcontrollers, capacitive sensor model, driver solenoid valves and solenoid valves 12 volts, while the software used is the programming language C. This system can work if the capacitive sensors detect altitude presence of water in the tub water level has exceeded the threshold that is set near the sensor. The capacitive sensor will send a signal to the microcontroller, and the microcontroller will mengatifkan driver solenoid valves, solenoid valves after the driver gets instructions for shaking Faucet solenoid mounted on the tub. Simulation of an automatic faucet in the tub is already working well to drive the solenoid valve automatically if the water level exceeds the lower limit or upper limit detected by the capacitive sensor solenoid valve will open and close.
Keywords: Sensor Kapasitif, Microcontroller atmega 16
I. PENDAHULUAN
Air dalam kehidupan dibutuhkan untuk berbagai kegiatan seperti untuk minum, memasak, mencuci, mandi dan kegiatan lainnya. Manusia menggunakan air dari berbagai sumber air, salah satunya air yang disediakan dari PDAM, dengan kata lain barang siapa yang menggunakan air tersebut harus membayar sesuai dengan berapa besar volume air yang dipakai. Namun dalam beberapa kasus jika menggunakan air dari keran PDAM orang lupa mematikan keran air sehingga air terus mengalir dan menyebabkan pemborosan air sehingga tagihan airpun meningkat.
Mikrokontroler merupakan suatu pengendali berukuran mikro, yang dapat digunakan bersamaan dengan alat elektronik lainnya. Keunggulan yang dimiliki mikrokontroler mengakibatkan banyak yang menggunakannya untuk aplikasi suatu sistem kendali. Pemakaian mikrokontroler umumnya digunakan dalam embedded systems yaitu sub-sistem mikrokomputer khusus sebagai bagian dari suatu sistem yang pengontrolnya yaitu mikrokontroler dibenamkan secara langsung di dalam suatu mesin. Ciri khas dari embedded systems adalah tidak melakukan transformasidata tetapi langsung berinteraksi dengan perangkat luar seperti sensor dan aktuator.
Berdasarkan latar belakang masalah tersebut perlu dilakukan suatu penanganan khusus agar penggunaan air pada bak mandi bisa diatur sesuai kebutuhan. Oleh karena itu penulis mencoba untuk merancang, dan membuat suatu alat yang bekerja secara otomatis, maka penulis member judul “ Simulasi Keran Otomatis Pada Bak Mandi Berbasis ATMega 16 “.
II. TINJAUAN PUSTAKA 2.1. Penelitian Terdahulu
Ada beberapa penelitian yang pernah dilakukan sebelumnya yang terkait dengan perancangan sistem ini seperti penelitian yang dilakukan oleh Marlina Malluka (2008), melakukan penelitian mesin filterisai air yang dapat mengubah air yang kurang bermutu menjadi air yang layak di kosumsi secara langsung tampa dengan harus memasaknya terlebih dahulu. Dengan menggunakan sensor yang dihubungkan dengan mikrokontroller. Sensor ini mempunyai 2 fungsi yaitu fungsi pertama untuk mendeteksi tempat penampungan air, sedangkan fungsi yang kedua sebagai mendeteksi penuhnya air.
menghentikan aliran air secaraotomatis didalam tandon air.
Dyah Ayu Wulandari (2008) melakukan penelitian tentang sistem otomatisasi keran wastafel pencuci tangan dan pengering tangan menggunakan mikrokontroler AT89S51 sebagai pengolah data, infrared sebagai sensor keberadaan tangan, relay sebagai aktuator.
Perbedaan dengan penelitian terdahulu yang diteliti oleh Marlina Malluka serta Danang Saktyo Yudhanto terletak pada keluarannya dimana pompa air menjadi fungsi utama untuk mengaliri air dan menghentikan aliran air secara otomatis di dalam tempat penampungan air sedangankan pada penelitian ini, keluarannya pada keran yang mempunyai fungsi untuk mengaliri dan menghentikan aliran air secara otomatis dalam bak mandi. Dan perbedaan dengan penelitian terdahulu yang dilakukan oleh Dyah Ayu Wulandari terletak pada sensornya, diamana penelitian terdahulu yang dilakukan oleh Dyah Ayu Wulandri menggunakan infrared sebagai sensor sedangkan dalam penelitian kali ini menggunakan sensor kapasitif untuk mengukur ketinggian air.
2.2.MikrokontrolerAVR
Mikrokontroler AVR merupakan pengontrol utama standar industri dan riset saat ini. Hal ini dikarenakan berbagai kelebihan yang dimilikinya dibandingkan mikroprosesor, antara lain murah, dukungan software dan dokumentasi yang memadai, serta memerlukan komponen pendukung yang sangat sedikit.Salah satu tipe mikrokontroler AVR untuk aplikasi yang standar yang memiliki fitur memuaskan ialah ATMega8535/16 atau ATtiny13.Tidak boleh tergantung hanya dengan satu tipe mikrokontroler saja, karena berbagai produsen mikrokontroler terkenal seperti ATMEL, Microchip, Maxim, Renesas dan Philips, menciptakan mikrokontroler dengan keunggulan masing-masing. Untuk menentukan mana mikrokontroler yang ingin digunakan, ada baiknya ditentukan spesifikasi yang diinginkan, lalu pilih mikrokontroler yang sesuai dengan spesifikasi tersebut. Beberapa faktor penting didalam pertimbangan antara lain.
a. Harga Mikrokontroler
b. Ukuran memori mikrokontroler
c. Fitur ADC,Timerdan Fasilitas komunikasi C
d. Fitur utama lainnya seperti sebagai pengontrol utama akuisisi data, penampilan LCD dan lainnya
e. Kecepatan eksekusiinstruksi
f. Fasilitas singleCycle Hardware Multiplier (untuk aplikasi DSP)
g. Dukungansoftwareyang dapat digunakan. (Budiharto,2010, h.293)
2.3. Sensor Kapasitif
Sensor Kapasitif dapat secara langsung mendeteksi berbagai hal gerak, komposisi kimia, medan listrik, dan secara tidak langsung dapat mendekteksi banyak variabellain yang dapat dikonvensi menjadi gerakan atau dielektric seperti tekanan, percepatan, tingkat cairan dan komposisi cairan. Dalam mendesain sensor kapasitif, memakai langkah-langkah berikut :
a. Mendesain keping elektroda untuk mengukur variabel yang diinginkan. Memaksimalkan kapasitansi,memperluas daerah sensor, jarak yang dekat antara elektroda.
b. Mengelilingi sensor ini dengan pengaman yang sesuai atau elektroda perisai untuk menangani kapasitansi liar dan crosstalk dari sirkuit lainnya.
c. Hitung kapasitansi sensor danoutputsinyal ayunan.
d. Tentukan fungsi transfer, seperti Eo = C (area-linear), Eo = 1 / C (spasi-linear). penggunaan dua kapasitor yang seimbang untuk akurasi tinggi, dengan fungsi transfer seperti C1/C2 atau (C1-C2) / (C1 + C2). e. Pilih frekuensi eksitasi yang cukup tinggi
untuk kebisingan rendah. Frekuensi eksitasi meningkat, kebisingan eksternal dan sirkuit yang dihasilkan akan menurun. f. Mendesain sirkuit untuk memenuhi
spesifikasi akurasi dan memberikan kekebalan sirkuit terhadap tantangan lingkungan
Gambar 1. Sensor Kapasitif
Dibandingkan dari berbagai bentuk yang disebutkan diatas, coaxial cylinders, mempunyai kelebihan bebas dari gangguan kapasitansi luar, karena silinder luar dihubungkan dengan ground. (Baxter, Capacitive Sensors, 2000)
III. METODE PENELITIAN
Penelitian ini mengambil objek sebuah prototipe keran otomatis yang bekerja mengubah besaran tinggi air menjadi data elektronik menggunakan sensor dan mikrokontroler ATMega 16.
Alat yang digunakan dalam penelitian skripsi ini antara lain :
a. Solder b. Obeng c. Gunting d. Bor listrik
Bahan yang digunakan sebagai berikut : a. Skrub
b. Kabel c. Pcb lubang
d. Mika hitam sebagai dudukan ataucasing e. Komponen elektronika:
g)
Mikrokontroler AVR ATMega16 3.1. Tahapan Penelitian1. Tahap Perencanaan
Tahap awal dari pembuatan Simulasi Keran Otomatis Bak Mandi Berbasis ATMega16 ini adalah tahap perencanaan, dalam tahap ini langkah-langkah yang dilakukan adalah:
a) Mengidentifikasi masalah. b) Menentukan tujuan sistem.
c) Mengidentifikasi kendala-kendala sistem. d) Membuat analisis kelayakan.
2. Tahap Analisis
Analisis sistem adalah penelitian atas sistem yang telah ada dengan tujuan untuk
merancang sistem yang baru. Dalam tahap ini, penulis melakukan studi kepustakaan, wawancara, dan percobaan langsung terhadap sistem yang telah berjalan untuk menentukan kebutuhan informasi. Tahap ini dilakukan untuk mengindentifikasi penyebab masalah dari sistem, kebutuhan informasi yang dibutuhkan, dan out put yang diharapkan. 3. Tahap Rancangan
Rancangan Sistem adalah penentuan proses dan data yang diperlukan oleh sistem yang baru. Dalam perancangan sistem ini, penulis melakukan perancangan peralatan dan penyusunan letak dari struktur komponen yang di gunakan, agar dapat menghasilkan suatu rangkaian dengan kerja yang optimal. 4. Tahap Penerapan
Penerapan merupakan kegiatan memperoleh dan mengintegrasikan sumber daya fisik dan konseptual yang menghasilkan suatu sistem yang bekerja. Melakukan percobaan dan pengujian modul-modul serta mengintegrasikan modul tersebut dengan perangkat lunak untuk mengendalikan sistem agar menjadi satu kesatuan yang utuh.Dalam tahap ini penulis membuat “ Simulasi Keran Otomatis Bak Mandi Berbasis ATMega16”.
Tahap penggunaan dilakukan dengan melakukan uji coba terhadap alat yang telah dibuat.
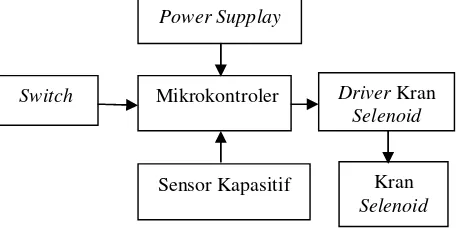
3.2. Diagram Blok Rangkaian
Untuk memahami dari proses rancangan dalam penelitian ini, penulis membuat gambar blok diagram rangkaian seperti gambar dibawah ini
Gambar 2. Blog Rangkaian
Berdasarkan gambar 2 maka dapat diuraikan masing-masing blok fungsinya sebagai berikut:
Switch Mikrokontroler DriverKran
Selenoid
Kran
Selenoid
Sensor Kapasitif
a. Switch
Digunakan sebagai masukan kode perintah yang akan dimasukan atau dipancarkan ke alat.
b. Mikrokontroler ATmega16
Sebagai otak dari sistem, data input dari pengguna dan sensor diproses oleh mikrokontroler yang hasilnya output yang akan diumpankan ke Keran Selenoid. c.DriverKeranSelenoid
Berguna sebagai pengisi perintah ke dalam mikrokontroler, dan mengerakan Keran Selenoid
d. Keran Selenoid
Digunakan sebagai pengendali keran selenoid pada keran, yang akan membuka dan menutup keran bak mandi secara ototmatis.
e. Power supplay
Pada dasarnya terdiri dari 3 bagian, pertama travo yang berfungsi untuk menurunkan tegangan AC 220 menjadi AC 12 V. Bagian kedua adalah penyearah dan filter, penyearah memakai dioda 4001 yang merubah tegangan AC menjadi DC, namun tegangan ini masih memunyai ripple, sehingga perlu difilter agar menjadi DC stabil. Filternya adalah Kapasitor. Bagian ketiga adalah Regulator, regulator yang dipakai adalah 7805 yang akan menghasilkan tegangan 5V, sementara 7812 akan menghasilkan tegangan 12 V. Kedua tegangan tersebut dipakai sebagai power supplykeseluruhan alat.
f. Sensor kapasitif
Rangkain ini bekerja dengan sistem kapasitif dimana semakin tinggi air, maka semakin banyak air yang masuk kedalam sensor, nilai kapasitansi sensor akan naik. Perubahan kapasitansi inilah yang akan diproses oleh Mikrokontroler.
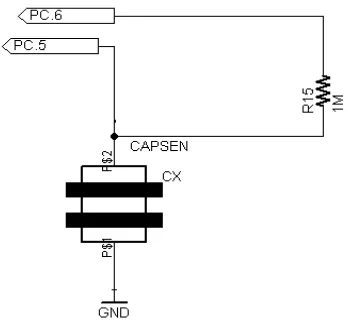
3.3. Rangkaian Sensor Kapasitif
Rangkaian ini bekerja dengan sistem kapasitif. Dimana semakin tinggi air, maka semakin banyak air yang masuk kedalam sensor, nilai kapasitansi sensor akan naik. Perubahan kapasitansi inilah yang akan diproses oleh mikrokontroler. Gambar rangkaian sensor kapasitif dapat dilihat pada gambar 3.
Gambar 3. Rangkaian Sensor Kapasitif 3.4. Rangkaian Driver Selanoid
Rangkaian ini berfungsi untuk memperkuat sinyal dari mikrokontroler sehingga mampu untuk menggerakan keran selanoid. Driver Sebagai pengisi perintah terhadap keran selanoid.
Gambar 4. RangkaianDriverdan Keran Selenoid
3.5. Rangkaian Keseluruhan Sistem
IV. HASIL DAN PEMBAHASAN
Setelah peralatan sudah disiapkan maka selanjunya melakukan proses penyolderan, berikut langkah-langkah dari proses penyolderan :
a. Karena menggunakan PCB Matrik maka menyiapkan PCB Matrik dan gambar rangkaian yang akan dibuat.
b. Membersihkan komponen-komponen elektronika yang akan di solder, terutama bagian yang akan di solder (kaki-kakinya) dengan menggunakan kain atau ampelas. c. Memanaskan solder sampai solder tersebut
mampu mencairkan tinol.
d. Memasang komponen yang akan di solder pada PCBkemudian lakukan penyolderan. Jangan memasang komponen sekaligus tetapi bertahap satu persatu (memasang satu komponen, terus lakukan penyolderan kemudian dipotong kaki-kakinya, setelah selesai baru pasang lagi komponen yang lainnya). Menyolder komponen yang paling tahan terhadap panas.
Penyoldiran komponen dioda, regulator tegangan 7805, dan ATMega 16 dilakukan secara hati-hati dengan membaca skema rangkaian dan mengikuti jalur yang dibuat padaPCB. Di bawah ini gambar proses hasil perakitan komponen keseluruhan :
Gambar 6. Hasil Perakitan Komponen 4.1. Pengujian kinerja Sensor
Sensor yang dimasukan kedalam bak mandi akan mendeteksi ketinggian air pada bak mandi, ketika sensor mendeteksi ketinggian air tersebut akan diubah menjadi panjang gelombang yang selanjutnya dioleh oleh mikrokontroler untuk menampilkan hasilnya padaLCD.
Pengujian sistem secara keseluruhan dilakukan untuk mengetahui apakah sistem yang telah dibuat telah berfungsi sesuai dengan yang diharapkan. Pengujian dilakukan dengan menghubungkan alat dengan tegangan listrik PLN untuk memberikan supply. Setelah alat hidup akan menampilkan tampilan tulisan nama alat pada layar LCD. Kemudian sensor akan mendeteksi ketinggian level air pada bak mandi setelah itu ketinggian air tersebut akan menjadi panjang gelombang yang kemudian akan diproses oleh mikrokontroler, hasil pemrosesan mikrokontroler ditampilkan di LCD berupa ketinggian air yang terisi pada bak mandi dan sekaligus mikrokontroler memberi perintah kepada driver solenoid untuk membuka atau menutup keran, jika ketinggian air pada bak mandi berada dibatas bawah yang sudah diatur maka keran akan terbuka dan air mengalir untuk mengisi bak mandi sedangkan ketinggian air pada bak mandi dibatas atas yang sudah diatur maka keran akan menutup sehingga air tidak mengalir ke bak mandi.
Gambar 8. Gambar Alat Keseluruhan
V. KESIMPULAN
Berdasarkan hasil dari penelitian yang telah dilakukan dari alat yang dibuat, maka dapatdiambil kesimpulan sebagai berikut : a. Telah dibuat simulasi keran otomatis pada
bak mandi berbasisATMega 16 mengunakan sensor kapasitif.
b. Pembuatan perangkat keras pada alat menggunakan mikrokontroler AVR ATMEGA16 sehingga rangkaian menjadi lebih ringkas karena pada mikrokontroler AVR ATMEGA16 bekerja sebagai pengolah data, pengatur dan pengontrol sistem kerja alat dan untuk perangkat lunak menggunakan bahasa C sehingga lebih mudah dimengerti dan dipelajari. c. Simulasi Keran otomatis pada bak mandi
ini hanya berlaku jika level melebihi dari ketingian air yang ada pada pada bak mandi yang sudah terpasang sensor. d. Keran Selenoidakan terbuka dan menutup
secara otomatis jika sensor kapasitif mendekteksi air yang melebihi ketiggian yang sudah diatur.
DAFTAR PUSTAKA
Adi, Nugroho Agung, 2010,”
Mekatronika”.Yogyakarta:Graha Ilmu
Andrianto, 2013. “Pemrograman Mikrokontroler AVR ATMega 16 Menggunakan bahasa C”, Bandung : Informatika Bandung
Blocher, Richard, 2004,”Dasar Elektronika”. Yogyakarta:Andi
Budiharto, 2005,”Elektronika Digital dan Komputer”.Yogyakarta:Andi
Nugroho,Harry Cahyo, 2014,“skripsi: Prototipe Pendeteksi Banjir Dan Pengontrol Pintu Otomatis dengan ATMega16. Surakarta: STMIK AUB Syarul, 2014,Pemrograman Mikrokontroler
AVR bahasa Assembly dan C, Bandung:Informatika
Usman, 2008,”Teknik Antar Muka dan Pemrograman Mikrokontroler”, Yogyakarta:Andi
Winoto, 2010,”Mikrokontroler AVR AtMega 8/16/8535 dan Pemrograman Dengan Bahasa C Pada WinAVR”,
Bandung:Informatika Bandung Yudhanto, 2011, skripsi:”Tandon Air