M A K A L A H SE M I NA R H A SI L T UG A S A K H I R (T A )
R A NC A NG B A NG UN D A N A NA L I SI S PE NG G UNA A N K E ND A L I PI D UNT UK B UC K B OOS T C H OPPE R K A PA SI T A S 1 k J B E R B A SI S M I K R O K O NT R O L E R
D io F awwaz Prakoso(1) , D r. E ng. Suroso, S .T .,M.E ng.(2) ,Priswanto, S.T ., M.E ng.(3) Mahasiswa Pemakalah1), Dosen Pembimbing I2), D osen Pembimbing II3) J urusan T eknik E lektro, F akultas T eknik, Universitas J enderal Soedirman
A B ST R A K
T urbin angin yang terpasang pada PL T B memuat generator induksi didalamnya dan menghasilkan tegangan keluaran yang dapat dikonsumsi oleh konsumen. Dalam prosesnya tegangan yang dikeluarkan belum stabil maka dibutuhkan penstabil tegangan. Pada penelitian ini, penstabil tegangan tersebut menggunakan buckboost chopper D C -D C converter. D engan menggabungkan sifat buck converter yang menurunkan tegangan dan boost converter sebagai penaik tegangan, maka akan dihasilkan tegangan tetap yang mengacu pada suatu tegangan referensi yang dihasilkan oleh sistem secara stabil. S elain itu, pada penelitian kali ini menggunakan kendali PID . E lemen kontroler P, I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat respon sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar. Penelitian ini menggunakan metode simulasi dengan software PSIM dan merancang hardware buckboost chopper. Penentuan konstanta K p, K i, dan K d menggunakan metode eksperimental. T egangan keluaran ( setpoint) pada penelitian sistem buckboost chopper ini adalah 24 volt dan menggunakan kecepatan angin dan tegangan masukan yang bervariasi. Pada simulasi, digunakan buckboost chopper dengan dua sistem PL T B paralel. Nilai tegangan keluaran saat kecepatan angin berbeda yaitu 3m/s dan 5m/s adalah 24,1volt. K emudian pada hardware buckboost chopper, hasil pengujian rata-rata %error yang didapat adalah <5%.
K ata kunci : Buckboost chopper, D uty cycle, PJ M, Mikrokontroler, dan PID. 1. PE NDA H UL UA N
1.1. L atar B elak ang
Perkembangan teknologi komponen dan rangkai an elektronika telah mampu menghasilkan sistem penyedia daya tegangan searah ( D C ) , yang dihasilkan melalui konversi tegangan D C masukan ke bentuk tegangan D C keluaran yang lebih tinggi atau lebih rendah. K onversi tegangan dc ini biasa disebut sebagai D C -D C konverter. Pada perkembangannya, penerapan D C -D C konverter telah memungkinkan suatu perangkat elektronika dapat berfungsi dengan menggunakan sumber energi baterei yang berukuran kecil di mana tegangan k eluarannya dapat diubah-ubah sesuai kebutuhan pemakaian. Hingga saat ini, berbagai konfigurasi D C -D C konverter telah banyak dikembangkan, diantaranya adalah jenis D C -D C konverter yang tidak memiliki isolasi dielektrik antara tegangan masukan dan keluaran, atau biasa disebut sebagai non-isolated D C -D C konverter.
S istem buckboost chopper merupakan salah satu regulator D C tipe switching non-isolated yang dapat menjawab kebutuhan akan sebuah sumber tegangan searah dengan tegangan keluaran yang variabel. D engan sistem buckboost chopper, nilai tegangan keluaran dapat diatur untuk lebih besar maupun lebih kecil dari nilai tegangan masukannya dengan mengatur besar lebar pulsa ( duty cycle) dari PJ M ( Pulse Jidth Modulation) . K arena itu, dibandingkan dengan regulator dc tipe pensaklaran lainnya, buckboost konverter memiliki range tegangan keluaran yang lebih lebar [ 1].
1.2. R umusan M asalah
1. B agaimana merancang dan menganalisa penggunaan kendali PID untuk Buckboost C hopper kapasitas 1kJ B erbasis mikrokontroler?
2. B agaimana membuat rangkaian Buckboost C hopper dengan kendali PID berbasis mikrokontroler untuk pengendali daya dua sistem PL T B paralel?
3. B agaimana cara pengkondisian sinyal keluaran Buckboost C hopper dengan kendali PID?.
1.3. B atasan M asalah
A gar penelitian ini terfokus, maka pembahasan pada penelitian ini dibatasi oleh hal-hal sebagai berikut :
1. Penjelasan cara kerja Buckboost C hopper. 2. Perancangan sistem kendali PID
menggunakan mikrokontroler A rduino. 3. Perancangan Buckboost C hopper dengan
kapasistas 1 kJ untuk pengendali daya PL T B .
1.4. T uj uan Penelitian
T ujuan dari penelitian ini antara lain : 1. Merancang dan menganalisa penggunaan
kendali PID untuk Buckboost C hopper kapasitas 1kJ B erbasis Mikrokontroler. 2. Menstabilkan tegangan keluaran pada
sistem Buckboost C hopper dengan menggunakan kendali PID.
3. Menguji secara simulasi dan alat apakah nilai tegangan keluaran yang dihasilkan sesuai dengan teori Buckboost C hopper. 1.5. M anfaat Penelitian
Manfaat dari penelitian ini adalah sebagai berikut :
1. Mengetahui cara merancang, menganalisa, dan membuat rangkai an Buckboost C hopper K apasitas 1 kJ dengan K endali PID berbasis mikrokontroler beserta komponen-komponen yang diperlukan. 2. Mengetahui bagaimana unjuk kerja dari
mikrokontroler dalam pengkondisian sinyal keluaran Buckboost C hopper dengan kendali PID.
3. Menciptakan nilai teganan keluaran yang stabil dengan kapasistas 1 kJ .
2. T I NJ A UA N PUST A K A
2.1. Pembangk it L istr ik T enaga A ngin/B ayu
Prinsip dasar kerja dari turbin angin adalah mengubah energi gerak angin menjadi energi putar pada kincir, lalu putaran kincir digunakan untuk memutar generator, yang akhirnya akan menghasilkan listrik. K omponen yang menghasilkan listrik pada rangkaian turbin angin pembangkit listrik adalah generator. Prinsip kerja generator adalah memakai kaidah Hukum F araday, yaitu apabila sebuah penghantar digerakkan di dalam sebuah medan magnet, maka kedua ujung penghantar tersebut akan timbul ggl induksi. B ila kedua ujungnya dihubungkan dengan beban, misalnya sebuah lampu, maka akan mengalir arus listrik dan timbul daya listrik [13]. E nergi mekanik yang dihasilkan dari kincir angin tersebutlah yang dapat dikonversi menjadi energi listrik. E nergi mekanik yang dihasilkan akan sebanding dengan massa angin dan kecepatan angin. B erikut adalah kurva karakteristiknya.
Gambar 2.1 K urva K arakteristi k PL T B [ 4]
2.2. B uckboost C onverter
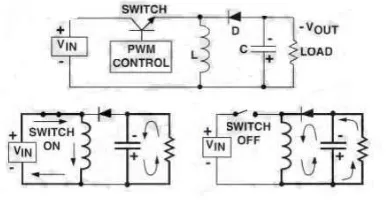
Buckboost konverter berfungsi untuk mengubah level tegangan D C , baik ke level yang lebih tinggi maupun ke level yang lebih rendah [ 15] . Namun buckboost konverter mengubah polaritas dari tegangan output terhadap tegangan input. Pada gambar 2.2 merupakan rangkaian dasar buckboost konverter yang terdiri dari power MOSF E T sebagai switching komponen, induktor ( L ) , dioda, kapasitor filter ( C ) dan resistor sebagai beban (RL) [ 2].
Gambar 2.2 Buckboost C onverter [ 1]
switch open, sehingga arus tetap mengalir ke induktor.
2.2.1. Pr insip K er j a B uckboost C onverter Prinsip kerja rangkaian ini dibagi menjadi 2 mode yaitu mode 1 saat switch di-ON-kan dan mode 2 saat switch di-OF F -kan. S iklus kerja buckboost konverter terlihat seperti pada gambar berikut.
Gambar 2.3 Siklus kerja buckboost konverter
baik pada switch ON & OF F [ 1]
S aat switch on, induktor mendapat tegangan dari input dan mengakibatkan adanya arus yang melewati induktor berdasarkan waktu dan dalam waktu yang sama kapasitor dalam kondisi membuang ( discharge) dan menjadi sumber tegangan dan arus pada beban.
S aat switch off, tegangan input terputus menyebabkan mulainya penurunan arus dan menyebabkan ujung dioda bernilai negatif dan induktor mensuplai kapasitor ( charge) dan beban. J adi pada saat switch on arus beban disuplai oleh kapasitor, namun pada saat switch off disuplai oleh induktor.
2.3. Sistem K endali
S istem kendali merupakan sebuah sistem yang terdiri atas satu atau beberapa peralatan yang berfungsi untuk mengendalikan sistem lain yang berhubungan dengan sebuah proses [6]. 2.3.1. Pengendali PI D
E lemen-elemen kontroler P, I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar [ E].
K eluaran pengendali PID merupakan jumlahan dari keluaran pengendali proporsional, integral, dan diferensial. Gambar 2.E menunjukkan hubungan tersebut. K arakteristik pengendali PID sangat dipengaruhi oleh kontribusi besar dari ketiga parameter P, I dan D . Penyetelan konstanta K p, T i, dan T d akan mengakibatkan penonjolan sifat dari masing-masing elemen. S atu atau dua dari ketiga
konstanta tersebut dapat disetel lebih menonjol dibanding yang lain. K onstanta yang menonjol itulah akan memberikan kontribusi pengaruh pada respon sistem secara keseluruhan [ 5].
G ambar 2.4 H ubungan dalam fungsi waktu antara
sinyal keluaran dengan masukan untuk pengendali
PID [ 8]
2.4. PI D L ibrary A rduino Uno
PID L ibrary adalah sebuah library yang terdapat pada A rduino Uno. S eperti diketahui, kontrol PID adalah menghitung nilai error yang didapatkan dari selesih antara nilai masukan dengan nilai setpoint. K ontrol PID disini berupaya untuk memperkecil nilai error tersebut dengan menyesuaikan nilai keluaran. Pada library PID ini juga sudah dilengkapi dengan pendeklarasian T uning-Parameters yaitu K p ( K onstanta Proposional) , K i ( K onstanta Integral) dan K d ( K onstanta D erivatif) . D engan merubah konstanta-kontansta inilah, hasil nilai keluaran yang disesuaikan cepat atau lambat dalam melakukan proses tersebut.
2.5. M ik r ok ontr oler A r duino
A rduino adalah sebuah board mikrokontroler yang berbasis A T mega328. A rduino memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PJ M, 6 analog input, crystal osilator 16 MHz, koneksi USB , jack power, kepala IC S P, dan tombol reset. A rduino mampu men- support mikrokontroller dan dapat dikoneksikan dengan komputer menggunakan kabel USB .
2.6. S oftware Penduk ung
Pada penelitan ini digunakan beberapa software atau perangkat lunak untuk mendukung simulasi, perancangan, pembuatan mulai dari rangkaian Buckboost C hopper hingga pembangkitan sinyal. S oftware yang digunakan adalah Power Simulation (PS IM) dan Proteus IS IS dan A R E S . PS IM merupakan software simulasi yang didesain khusus untuk studi simulasi elektronika daya, kontrol analog dan digital, magnetik, dan motordrive. R angkaian dalam PS IM direpresentasikan dalam empat diagram blok yaitu rangkaian daya, rangkaian kontrol, sensor, dan kontroler saklar. S edangkan Proteus adalah software buatan L abcenter E lektronik yang digunakan untuk simulasi dan perancangan skematik dalam pembuatan PC B ( Printed C ircuit Board) .
2.7. M etode Standar D eviasi
S tandar deviasi adalah nilai statistik yang
digunakan untuk menentukan bagaimana
sebaran data dalam sampel, dan seberapa dekat
titik data individu ke mean - atau rata-rata -
nilai sampel. S ebuah standar devi asi dari
kumpulan data sama dengan nol menunjukkan
bahwa semua nilai-nilai dalam himpunan
tersebut adalah sama. [ 16].
3. M E T O D E PE NE L I T I A N 5. Multimeter digital. 6. Osiloskop digital. 7. S eperangkat kamera. 8. S older.
E. T ang Potong. 10. S eperangkat Obeng. 11. S oldering A traktor.
3.2.2. B ahan
A dapun bahan yang akan dipakai pada penelitian ini adalah :
1. C atu D aya D C . 3.3.1. T ahap Persiapan
Merupakan tahapan sebelum melakukan penelitian, meliputi pembuatan pra-proposal, perumusan masalah, hingga mengidentifikasi masalah. Mempelaj ari permasalahan melalui studi literatur ( studi pustaka, buku, jurnal, artikel, dan sebagainya) tentang karakteristik dan cara kerja untuk mendapatkan suatu hipotesa. Mencari referensi metode yang digunakan untuk pemrograman PJ M dan kendali PID dengan mikrokontroler. Menentukan objek serta lokasi penelitian. 3.3.2. T ahap Per ancangan dan
Simulasi K omputer
D alam tahap ini merupakan pembuatan rancangan rangkaian menggunakan software Power PSIM Proffesional E.0.3 dan Proteus 8.6. D iagram blok keseluruhan dapat dilihat pada gambar dibawah ini.
Gambar 3.1 D iagram B l ok S istem
yang diinginkan maka keluaran dari buck-boost converter di umpanbalik ke pengendali yang berupa mikrokontroler A rduino yang telah di tanam program metode kendali PID . K emudian, rangkai an optocoupler merupakan salah satu jenis komponen rangkai an penyulut saklar daya. 3.3.3.
T ahap
P embuatan
Penguj ian
dan Penguj ian Pr ototipe
D i tahap ini merupakan tahap pembuatan prototype rangkaian Buckboost C hopper. R angkaian ini yang nantinya akan diuji apakah Buckboost C hopper dapat menghasilkan tegangan keluaran yang stabil dengan kendali PID berbasis mikrokontroler.
3.3.4. T ahap Pengambilan Data
Pengambilan data dilakukan guna mempelajari hasil dari uji rangkaian Buckboost C hopper yaitu bagaimana nilai tegangan keluaran yang dihasilkan dan pengaruh kendali PID terhadap kurva tegangan keluaran.
3.3.5. T ahap A nalisis
T ahap analisis merupakan tahap untuk menganalisa data yang didapat dari hasil pengujian rangkaian Buckboost C hopper apakah nilai tegangan keluaran yang dihasilkan sudah sesuai dengan teori yang berlaku.
3.3.6. T ahap A k hir
T ahap ini adalah tahap paling akhir, dimana semua hasil penelitian akan diolah yang kemudian disusun menjadi laporan hasil penelitian dan kemudian diseminarkan
3.4. Diagr am A lur Penelitian
D iagram alur penelitian dapat dilihat pada Gambar 3.1 dibawah ini.
Gambar 3.1 D iagram A lur Penelitian
4. H A SI L DA N P E M B A H A SA N 4.1. H asil Per ancangan Sistem
Gambar 4.1 menunjukan hasil perancangan dari topologi topologi buckboost chopper dengan model Pulse Jidth Modulation ( PJ M) dan kendali PID dengan menggunakan PS IM E.0.3., dimana pada perancangan prototype model Pulse Jidth Modulation ( PJ M) dan kendali PID akan menggunakan basis mikrokontroler.
rangkaian utama chopper. Pada penelitian ini terdapat rangkaian rectifier dimana rangkai an tersebut berguna sebagai penyearah dari rangkaian paralel sistem PL T B . S edangkan rangkai an utama buckboost chopper terdiri dari induktor yang berfungsi sebagai filter daya yang masuk, IGB T sebagai media penyaklaran yang merupakan komponen penting karena pada dasarnya prisip kerja buckboost chopper adalah menaikkan dan menurunkan tegangan dari adanya sinyal PJ M yang masuk ke IGB T . Penelitian ini juga akan menggunakan beban berupa resistor, voltage sensor dan rangkaian kendali PID serta rangkain pembangkit sinyal Pulse Jidth Modulation ( PJ M) .
4.1.1. Par ameter B uckboost C hopper D alam menentukan parameter perancangan buckboost chopper yang harus pertama dilakukan adalah menentukan parameter dari tegangan input ( V in) dan tegangan output ( V out) yang diinginkan dan juga mode dari perancangan buckboost chopper itu sendiri. sesuai instruksi sebelumnya yaitu menentukan nilai parameter yang ditetapkan pada awal perencanaan sistem buckboost chopper adalah sebagai berikut :
T egangan K eluaran = 24 volt R ipple T egangan = 1% F rekuensi Switching = 31 K Hz
D ari parameter diatas, didapatkan nilai-nilai yang ak an diimplementasikan ke masing-masing komponen, yaitu:
D uty cycl e : 50% R esistor : 50 Ω Induktor : 1 mH K apasitor : 0.001 F arad
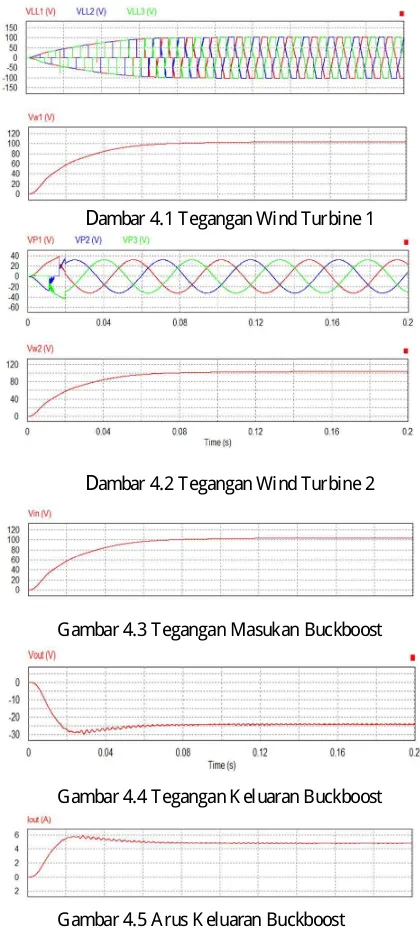
4.2. H asil S imulasi dan P embahasan D alam subbab ini, penulis akan menyampaikan hasil dari simulasi rangkaian buckboost chopper yang terhubung dengan 2 sistem PL T B dengan menggunakan software PS IM.
Gambar dibawah ini menunjukan simulasi dari penelitian kali ini. K ecepatan angin yang digunakan antara sistem 1 dan sistem 2 pada PL T B berbeda. B erikut adalah hasinya.
Dambar 4.1 T egangan Ji nd T urbine 1
Dambar 4.2 T egangan Ji nd T urbine 2
Gambar 4.3 T egangan Masukan Buckboost
Gambar 4.4 T egangan K eluaran Buckboost
Gambar 4.5 A rus K el uaran Buckboost
4.3. Per ancangan P r ototipe
Pada percangan prototipe dari buckboost chopper ini selain menggunakan hasil simulasi PSIM E.0.3. sebagai acuan awal juga menggunakan software Proteus 8.6 dan dibantu dengan software A R E S dan ISIS dimana setiap software yang digunakan saling memiliki kekurangan dan kelebihan masing-masing dan pada penelitian ini digunakan untuk saling melengkapi. D an untuk merancang simulasi berupa program yang berbasis mikrokontroler akan menggunakan software Arduino ID E . 4.3.1. Per ancangan S ensor T egangan
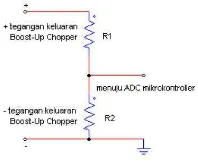
S ensor tegangan yang digunakan pada rangkai an buckbboost chopper berfungsi untuk memberikan tegangan pada mikrokontroller sebagai respon untuk fungsi kendali PID. K arena hasil hasil pembagi tegangan akan disampaikan pada komponen mikrokontroler ( A rduino Uno) dan tegangan maksimal yang dapat dilalui oleh A D C pada mikrokontroller hanya sebesar 5 V olt.
G ambar 4.6 S kema Pembagi T egangan
Pada perancangan ini kita menetapkan nilai tegangan yang masuk ke pembagi tegangan dari buckboost chopper sebesar 80 volt, tegangan ke A DC mikrokontroler untuk menjaga jika terjadi lonjakan tegangan dari keluaran buckboost chopper dengan menetapkan tegangan dibawah 5 V olt menuju A D C dan nilai R 1 sebesar 15000 Ohm sehingga persamaan yang akan kita gunakan untuk mencari nilai R 1 adalah :
�2= � (�1+�2) (4.4)
D ari hasil perhitungan berdasarkan persamaan pembagi tegangan maka kita peroleh nili R 2 sebesar 1000 Ohm dan R 1 15000 ohm. 4.3.2. Per ancangan K endali PI D dan PJ M
K ontroler digunakan untuk mengontrol tegangan keluaran dari buckboost chopper agar tegangan keluarannya stabil. K ontroler yang digunakan adalah mikrokontroler A rduino Uno dengan menggunakan al goritma PID kontroler. D alam membuat kontroler ini yang diperhatikan adalah mengenai setpoint dari output buckboost yang harus dipertahankan yang dilihat dari data A DC . Nilai PID adalah penjumlahan dari nilai
analogout=analogR ead( sensor) ; analogout=map( analogout,0,1023,0,255);
vout=( analogout*24) /86; error=setpoint-analogout; integral += error*timesampling; p=kp*error;
i=ki*integral;
i=integral+( error*ki)*timesampling; d=(( analogout*kd) / timesampling); pid=p+i+d; mikrokontroler yang selanjutnya digunakan optocoupler sebagai pemisah dan masuk kerangkaian totempole yang berfungsi untuk penguat arus dimana rangkaian optocoupler dan totempole dikemas dalam rangkaian driver T L P 250. B esarnya nilai PJ M tergantung pada besarnya settingan duty cycle yang digunak an pada program.
4.3.3. D esain Pr ototipe B uckboost C hopper
5 ari hasil pe rancangan b agian-b agian prototype buckbost chopper yang tel ah dilakukan sebelumnya maka hasil desain keseluruhan rangkaian ditunjukan pada gambar 4.7 dan gambar 4.8 yang masing-masing didesain dengan menggunakan software Proteus 8.6 dan A R E S.
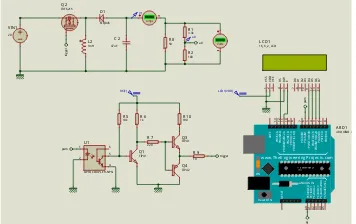
Gambar 4.7 S kemati k Buckboost C hopper Proteus
Proses selanjutnya setelah melakukan simulasi skematik prototype buckboost chopper maka yang dilakukan adalah mendesaian penempatan setiap komponen elektronika yang digunakan, pada penelitian ini mengunakan A R E S yang ditunjukan pada gambar 4. skematik PC B buckboost chopper.
G ambar 4.8 P rintout skematik buckboost chopper
4.4. H asil Penguj ian dan A nalisis
Pada proses pengujian ini dibagi menjadi tiga bagian yaitu pengujian rangkaian driver, hasil perancangan prototype rangkaian utama buckboost chopper tanpa beban, dan pengujian dengan beragam beban. Pengujian tersebut tentunya sudah menggunakan kendali PID dan akan dili hat pengaruh kendali tersebut terhadap tegangan keluaran. S etelah mendapatkan hasil uji melalui osiloskop, penulis akan menganalisis
hasilnya. Pada G ambar 4.E, dapat dilihat Hardware keseluruhan dari penelitian kali ini.
G ambar 4.E Hardware K eseluruhan
4.4.1. Penguj ian Sinyal I G B T
Untuk memastikan apakah rangkaian driver dalam hal ini T L P 250 bekerja dengan skema maka diperlukan uji terhadap rangkai an driver. Pada penelitian ini digunakan IC T L P250 sebagai rangkaian k emudi IGB T .
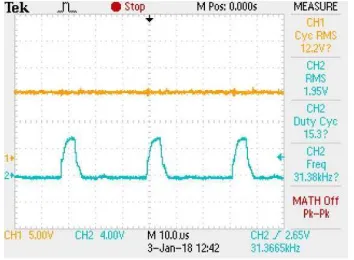
Pada penelitian ini diberikan tegangan V cc 24 V olt sehingga tegangan gate-source V GS akan berubah dari 0 ke 24 V dikuarangi jatuh tegangan pada tahanan gate-source R GS dengan lebar pulsa mengikuti karakteristik lebar pulsa sinyal masukannya. Gambar berikut menunjukan hasil pengujian sinyal V GS dengan memberikan nilai duty cycle 25%, 50%, 75% dan E0%. C H1 merupakan probe yang dipasang pada kaki gate dan source pada IGB T . B erikut adalah contoh gambar hasil pengujian menggunakan osiloskop dutycycle 50%.
G ambar 4.10 Sinyal VG S duty cycle 50%
frekuensi dari mikrokontroler. B erikut adalah tabel dari hasil uji rangkaian driver.
T abel 4.1 Hasil Pengujian Rangkaian D river T eg.
M asuk an
T eg. R M S I G B T
(V )
Duty C ycle I G B T
( % )
F r ek . Switching
(K H z)
5 E.83 52.3 31.41
12 1.E5 15.3 31.38
16 1.45 11.5 31.2E
26 0.732 4.EE 31.37
30 0.368 5.46 31.3E
D ari hasil pengujian pada T abel 4.1, dapat dilihat bahwa ketika tegangan masukan yang dipakai berbeda-beda. Pengujian ini dilakukan uji sinyal PJ M yang masuk ke gate IGB T untuk memastikan apakah program pada mikrokontroler untuk memberikan PJ M dengan mengatur duty cyle bekerja pada IGB T . . Selanjutnya sinyal keluaran yang diperoleh melalui osiloskop dari kaki gate and source pada probe C H2 dapat dilihat pada gambar berikut ini. Sedangkan, C H1 merupakan sinyal pada tegangan masukan.
Gambar 4.11 S inyal K eluaran IG B T Masukan 5 volt
4.4.2. Penguj ian P engar uh K endali PI D pada R angk aian B uckboost C hopper T anpa B eban
Pada pengujian kali ini, bertujuan untuk mengetahui apakah target untuk mode buck dan boost tegangan D C dapat tercapai sesusai setpoint yang ditentukan yaitu 24 V olt. Maka butuh pengujian pengaruh kendali PID pada rangkai an buckboost chopper tanpa beban. Hasil pengujian dapat dilihat pada T abel 4.2 dan gambar dibawah ini.
T abel 4.2 Hasil Pengujian Tanpa Beban V input
(V )
Setpoint V output (V )
% E rror ( % )
5 24 V 23.5 2.2%
12 24 V 23.E 0.4%
16 24 V 24.1 0.4%
26 24 V 24.3 1.2%
30 24 V 24 0
Hasil pengukuran rangkaian buckboost chopper pada T abel 4.2 diperoleh nilai tegangan keluaran yang diperoleh melalui osiloskop. Untuk melihat contoh dari pengukuran menggunakan osiloskop, dapat dilihat pada gambar 4.13 berikut. C H1 merupakan sinyal tegangan input, sedangkan C H2 sinyal tegangan output.
(a)
(b)
G ambar 4.13 Hasil Pengukuran Input ( a) 5v (b) 30v
K emudian disimpulkan bahwa alat memiliki rata-rata <5% error.
S elanjutnya, dilakukan perhitungan standar devi asi dari hasil keseluruhan tegangan keluaran yang didapatkan menggunakan Microsoft E xcel, hasil yang didapatkan adalah 0,2E6648.
4.4.3. Penguj ian P engar uh K endali PI D pada R angk aian B uckboost C hopper dengan B eban Satu R esistor
B erbeda dengan pengujian sebelumnya, pegujian kali ini menggunakan beban resistor kapur 20 watt dengan spesifikasi 10Ω . Hasil pengujian dapat dilihat pada T abel 4.3 dan gambar dibawah ini.
T abel 4.3 Hasil Pengujian dengan Beban Satu Resi stor
V input (V )
Setpoint I out (A )
V out (V )
%E rror V out 5 24 V 1.82 1E.8 17.5% 12 24 V 2.28 24.5 2.083% 16 24 V 2.32 24.6 2.5% 26 24 V 2.25 23.7 1.25% 30 24 V 2.47 24.4 1.67%
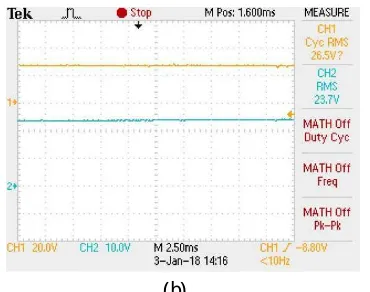
Hasil pengukuran rangkaian buckboost chopper pada T abel 4.2 diperoleh nilai tegangan keluaran yang diperoleh melalui osiloskop. Untuk melihat contoh dari pengukuran menggunakan osiloskop, dapat dilihat pada gambar 4.14 berikut.
(a)
( b)
Gambar 4.14 Hasil Pengukuran Input ( a) 12v ( b) 27v
B erdasarkan T abel 4.3, pengujian yang dilakukan menggunakan 5 macam variasi tegangan masukan. G ambar 4.14( a) adalah sistem dalam mode boost dari 12,4v menjadi 24,5v. Sedangkan G ambar 4.14( b) merupakan mode buck dari 26,5v menjadi 23,7v. K emudian rata-rata %error yang didapat <5%. Namun, pada tegangan masukan 5v, %error yang didapat 17,5%. Hal ini disebabkan oleh terjadinya kesalahan pada kendali PID -nya dan nilai beban yang terlalu kecil sehingga menyebabkan adanya nilai arus yang besar.
S elanjutnya, dilakukan perhitungan standar devi asi dari hasil keseluruhan tegangan keluaran yang didapatkan menggunakan Microsoft E xcel, hasil yang didapatkan adalah 2,043282.
4.4.4. Penguj ian P engar uh K endali PI D pada R angk aian B uckboost C hopper dengan B eban D ua R esistor Ser i
T abel 4.4 Hasil Pengujian dengan Beban D ua Resi stor Seri
V input (V )
Setpoint I out (A )
V out (V )
%E rror V out 5 24 V 2.03 21.6 10% 12 24 V 2.32 24.2 0.83% 16 24 V 2.32 23.8 0.83% 26 24 V 2.3E 24.3 1.25% 30 24 V 2.38 24.2 0.83%
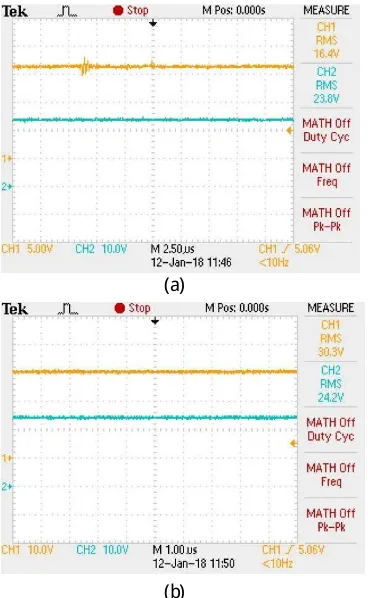
Hasil pengukuran rangkaian buckboost chopper pada T abel 4.4 diperoleh nilai tegangan keluaran yang diperoleh melalui osiloskop. Untuk melihat contoh dari pengukuran menggunakan osiloskop, dapat dilihat pada gambar 4.15 berikut. C H1 merupakan sinyal tegangan input, sedangkan C H2 sinyal tegangan output.
(a)
(b)
Gambar 4.15 Hasil Pengukuran Input ( a) 16v ( b) 30v
B erdasarkan T abel 4.4, pengujian yang dilakukan menggunakan 5 macam variasi tegangan masukan. G ambar 4.15( a) adalah sistem dalam mode boost dari 16,4v menjadi 23,8v. Sedangkan G ambar 4.15(b) merupakan mode buck dari 30,3v menjadi 24,2v. K emudian
rata-rata %error yang didapat adalah <5 %error. Namun, pada tegangan masukan 5v, %error yang didapat 10%. Hal ini disebabkan oleh terjadinya kesalahan pada kendali PID-nya.
S elanjutnya, dilakukan perhitungan standar devi asi dari hasil keseluruhan tegangan keluaran yang didapatkan menggunakan Microsoft E xcel, hasil yang didapatkan adalah 1,145426.
4.4.5. Penguj ian P engar uh K endali PI D pada R angk aian B uckboost C hopper dengan B eban D ua R esistor P ar alel
Pengujian terakhir adalah menggunakan beban dua resistor kapur 20 watt dengan spesifikasi 10Ω yang dipasang paralel. Itu berarti nilai beban menjadi 5Ω . Hasil pengujian dapat dilihat pada T abel 4.5 dan gambar dibawah ini.
T abel 4.5 Hasil Pengujian dengan Beban D ua Resi stor Paralel
V input (V )
Setpoint I out (A )
V out (V )
%E rror V out 5 24 V 1.62 17.2 28.3%
12 24 V 2.2E 24.8 3.3%
16 24 V 2.24 23.7 1.25% 26 24 V 2.40 24.2 0.83% 30 24 V 2.30 23.6 1.67%
(a)
(b)
G ambar 4.16 Hasil Pengukuran Input ( a) 12v ( b) 26v
B erdasarkan T abel 4.5, pengujian yang dilakukan menggunakan 5 macam variasi tegangan masukan. G ambar 4.16( a) adalah sistem dalam mode boost dari 12,6v menjadi 24,8v. S edangkan G ambar 4.16( b) merupakan mode buck dari 26,5v menjadi 24,2v. K emudian rata-rata %error yang didapat adalah <5 %error. Namun, pada tegangan masukan 5v, %error yang didapat 28,3%. Hal ini disebabkan oleh terjadinya kesalahan pada kendali PID-nya dan nilai beban yang terlalu kecil sehingga menyebabkan adanya nilai arus yang besar.
Selanjutnya, dilakukan perhitungan standar devi asi dari hasil keseluruhan tegangan keluaran yang didapatkan menggunakan Microsoft E xcel, hasil yang didapatkan adalah 3,11127.
4.4.6. Penguj ian T ampilan L C D
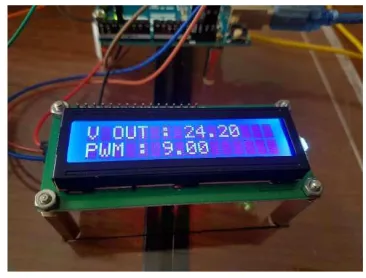
Penulis menggunakan L C D untuk menampilkan hasil dari tegangan output yang dihasilkan oleh rangkaian Buck-Boost C hopper dan menampilkan nilai duty cycl e yang dihasilkan oleh trigger pin PJ M arduino menuju T L P 250 dan menghasilkan sinyal pensaklaran pada IGB T . L C D yang digunakan ditambahkan komponen I2C , yang berguna
untuk mempermudah penulis menampilkan karakter ke L C D . Hanya terdapat 4 Port yang digunakan pada I2C , yaitu V cc, Gnd, S D A , dan S C L . K onfigurasi L C D 12C dan arduino ditunjukkan pada gambar 4.17.
G ambar 4.16 K onfigurasi T ampilan L C D I2C dan
A rdui no Uno
Selanjutnya, pada penelitian kali ini menggunakan hardware L C D yang sudah terpasang modul I2C . L C D menampilkan nilai tegangan keluaran yang terbaca oleh sensor tegangan dan PJ M. B erikut merupakan gambar dari hardware L C D dan tampilan yang terbaca.
G ambar 4.17 T ampi lan L C D
5. K esimpulan dan S ar an 5.1. K esimpulan
B erdasarkan penelitian yang sudah dilakukan, didapatkan kesimpulan sebagai berikut:
1. R angkaian buckboost chopper dengan kendali PID berbasis mikrokontroler Arduino Uno dapat menyeimbangkan tegangan keluaran dengan setpoint 24 volt. 2. Perancangan buckboost chopper dipengaruhi oleh parameter-parameter seperti dutycycle dan nilai komponen yang akan digunakan.
volt masih belum sempurna. Nilai tegangan keluaran yang dihasilkan tidak mendekati setpoint, melainkan menghasilkan persentase kesalahan mak simal 28,3%. 4. Perbandingan nilai resistor yang digunakan
pada sensor tegangan sangat mempengaruh pembacaan. S emakin jauh perbandingan nilai resistor yang digunakan maka nilai yang terbaca tidak akurat.
5.2. S ar an
1. D alam penentuan nilai P, I, dan D , disarankan menggunakan autotuning yang telah disediakan matlab ataupun coding autotuning Arduino.
2. Pada penelitian sel anjutnya, disarankan menggunakan modul sensor tegangan agar pembacaan nilai analog yang didapatkan lebih baik.
3. D isarankan melakukan pengujian dengan tegangan multi input menggunakan sistem PL T B yang ada pada kampus T eknik Universitas J enderal S oedirman.
4. Untuk penelitian selanjutnya, diharapkan pada alat ini dapat menghasilkan kapasitas daya 1 kJ .
DA F T A R PUST A K A
[ 1] Suryo, Mochammad Hidayat. 2010. “R ancang B angun B uckboost K onverter”. D epok: Universitas Indonesia.
[ 2] J . Hart, D anil. 1EE7. “Introduction to Power E lectronics”. V alparaiso University, Indiana: Prenice-Hall International, Inc.
[ 3] A nnaba, K emjika. “D esign and Implementation of a Buck C onverter”.
[ 4] R ashid, Muhammad H. 2007. “Power E lectronics Handbook Second E dition”. US A : Pearson Prentice Power dengan Menggunakan Persamaan Hamilton Pontryagin”. T esi s IT B . B andung: 1EE4.
[ 7] K oyata. 1EE7. “T eknik K ontrol A utomatik”. J akarta: E rlangga.
[ 8] C hairuzzani. “Pengenalan Metode Z iegler-Nichols pada Perancangan PID ”. 1EE8.
[ E] B .J . 2006. “Sistem Instrumentasi dan S istem K ontrol”. J akarta: E rlangga. [ 10] A .P. Malvino. 1EE2. “Prinsip-Prinsip
E lektronika dalam E disi ke-4”. J akarta: E rlangga.
[ 11] R ashid, Muhammad H. 1EEE. “Power E lectronics C ircuits, D evices, and Applications”. USA : Pearson Hall [ 12] Sunomo, 1EEE. “Power Mosfet dan IGB T ,
![Gambar 2.1 K urva K arakteristik PLTB [4] 2.2. Buckboost Converter](https://thumb-ap.123doks.com/thumbv2/123dok/2870620.1695556/2.612.330.503.300.429/gambar-k-urva-k-arakteristik-pltb-buckboost-converter.webp)