TUGAS
Dosen Pengampu : Dr. Ir. T. Aris Sunantyo, M.Sc.
MATAKULIAH SISTEM PENENTUAN POSISI DAN NAVIGASI
DISKUSI KELOMPOK
OLEH : NURHADI BASHIT
ANINDYA SRICANDRA PRASIDYA
MAGISTER TEKNIK GEOMATIKA
PROGRAM PASCASARJANA, FAKULTAS TEKNIK UNIVERSITAS GADJAH MADA
TUGAS
Dosen Pengampu : Dr. Ir. T. Aris Sunantyo, M.Sc.
MATAKULIAH SISTEM PENENTUAN POSISI DAN NAVIGASI
DISKUSI KELOMPOK
Problem : Bagaimana konsep menentukan posisi 3D di atas bidang proyeksi UTM jika dengan mengamati satelit GNSS?
Jawabannya:
Secara teoritik dengan kemajuan teknologi receiver yang mampu mengamati sinyal GPS dan GLONASS secara bersamaan, sehingga geometri satelit yang teramati menjadi lebih baik dan lebih kuat. Berdasarkan hasil penelitian, kombinasi sistem satelit GPS dan GLONASS dapat meningkatkan ketelitian posisi sampai orde milimeter pada baseline pendek dan orde centimeter pada baseline panjang.
1. Menghitung koordinat posisi satelit dari Broadcast Empemeris
Parameter ephemeris menggambarkan orbit selama interval tertentu waktu (setidaknya satu jam). Parameter ephemeris adalah parameter untuk perpanjangan dari model orbital diprediksi oleh Kepler. Parameter-parameter BE dapat digunakan untuk memperoleh koordinat-koordinat satelit yang mengirimkan sinyal-sinyalnya (atau kode yang kemudian dapat dikonversikan ke dalam pseudo-range) dapat diketahui waktu demi waktu. Koordinat satelit diketahui dari informasi orbit
(broadcast ephemeris atau broadcast orbit) yang terkandung dalam pesan navigasi (navigation message). Parameter BE yang disiarkan oleh satelit dan tersedia setelah diterima oleh receiver penerima.
Cara perhitungan koordinat satelit (kartesi 3 dimensi) dari data
Broadcast Ephemeris
(Rizos, 1997)
Konstanta
Konstanta gravitasi universal bumi
Kecepatan rerata rotasi bumi
µ = 3986001,5 x 10
8m
3/det
Ω = 7,2λ2115147 x 10
-5rad/sec
π = 3,1415λ26535κλκ
Perhitungan anomaly sejati
Waktu sesudah epoch referensi
Rerata gerakan terkoreksi
Rerata anomaly pada
Penyelesaian iterative untuk E
kAnomali sejati
v
k√
(
√
)
∆
n
: perbedaan dari anomali menengah = 4.389112813.10-9 rad/det
e
: eksentrisitas = 2.8019920.10-3
ω
= 2.420534936 rad
t
oe:
time of ephemeris
, epoch referensi dari efemeris
a
: sumbu panjang ellipsoid
i
: kecepatan perubahan dari inklinasi
Ω
: kecepatan perubahan dari right ascension
Cuc,Cs : koefisien koreksi argument of perigee
Crc ,Crs : koefisien koreksi jarak geosentrik
Cic ,Cis : koefisien koreksi inklinasi
2. Menyusun persamaan jarak antara satelit ke antenna dengan menggunakan beda waktu / beda fase
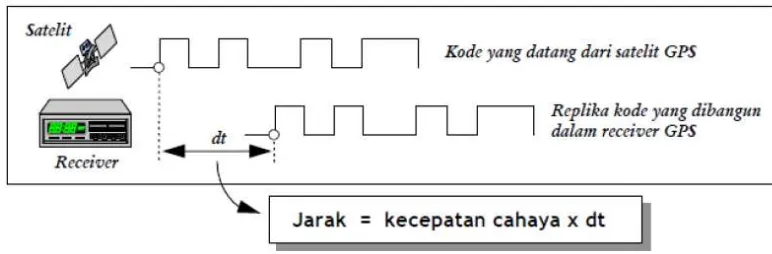
Komponen penginformasi jarak (kode), didalamnya terdapat dua kode Pseudo-Random Noise (PRN) yang dikirim oleh satelit dan digunakan sebagai penginformasi jarak, yaitu kode-P (P = Precise atau Private) dan kode-C/A (C/A = Coarse Acuisition). Kode-P(Y) dengan frekuensi 10.23 Mhz dan kode-C/A dengan frekuensi 1.023 Mhz. Kode ini terdiri dari rangakaian bilangan biner (1 dan 0) yang mempunyai struktur yang unik dan berbeda untuk setiap satelit GPS, sehingga
receiver GPS dapat mengamati dan membedakan sinyal-sinyal yang datang dari satelit yang berbeda. Dengan mengamati kode-P(Y) atau kode-C/A jarak dari pengamat ke satelit dapat ditentukan. Prinsip pengukuran jarak yang digunakan adalah dengan membandingkan kode yang diterima dari satelit dengan kode replika yang diformulasikan di dalam receiver.
3. Menentukan persamaan jarak
Secara matematis metode persamaan jarak pseudorange dapat digunakan rumus :
Dengan :
c : kecepatan gelombang di dalam medium hampa
dt : beda waktu antara gelombang satelit GNSS saat dipancarkan dan saat diterima
(u,v,w)i : posisi koordinat satelit GNSS (earth fix coordinates) dalam sistem kartesi 3D
(u,v,w)k : posisi koordinat receiver dalam sistem koordinat kartesi 3D
Pi
K : jarak antara satelit GNSS ke receiver
Adapun penentuan rumus untuk mendapatkan jarak melalui data fase adalah sebagai berikut (Abidin, 2000 dalam Suharno, 2008) :
Dengan :
Li =λi.ϕi : adalah jarak fase (carrier range) pada frekuensi fi (m), (I = 1,2),
Ρ = jarak geometris antara satelit GNSS dengan receiver dρ = kesalahan jarak karena efek ephemeris (orbit)
dtrop = bias karena efek refraksi troposfer (m)
dioni = bias karena efek refraksi ionosfer (m) i. = panjang gelombang dari sinyal (m)
dt, dT = kesalahan dan offset antara jam receiver dan jam satelit (m) MCi = efek dari multipath pada hasil pengamatan Li
Ni = ambigiutas fase dari pengamatan fase sinyal - sinyal Li (dalam gelombang)
4. Membuat persamaan normal dari ranging
Formulasi di atas menunjukkan formulasi penentuan jarak dalam ruang dengan titik Xi, Yi dan Zi sebagai parameter. Jika koordinat pendekatan yang akan dicari
digunakan titik Xi0, Yi0 , dan Zi0 maka jarak dapat diformulasikan dengan:
Dengan demikian koordinat (fungsi f{Xi, Yi, dan Zi}) yang menjadi parameter dapat dihitung dengan :
Xi = Xi0 + ΔXi
Yi = Yi0 + ΔYi
Zi = Zi0 + ΔZi
Fungsi f(Xi , Yi , Zi) kemudian digantikan oleh fungsi yang setara f(Xi0+ ΔXi
,Yi0+ΔYi ,Zi0+ΔZi ).
Suatu deret Taylor yang digunakan untuk menyusun matrik dari persamaan normal sebagai berikut:
parameter f( ΔXi , ΔYi , ΔZi) akan terlihat dalam bentuk tidak linear. Secara parsial
diperoleh bentuk persamaan:
Dan komponen-komponen vektor unit yang ditunjuk dari satelit ke arah titik pendekatan.
yang ekuivalensi dari f(Xi , Yi , Zi) dengan ρji(t) telah digunakan untuk sisi kiri.
Persamaan diatas sekarang menjadi linear dengan memperhatikan parameter ΔXi ,
5. Menyusun dimensi matrik dari persamaan normal Vektor matriks :
L + V = A X atau V = A X – L
Jika L = Vektor Observasi A = Matriks Desain X = Vektor Parameter
Sehinggan pembentukan persamaan normalnya adalah : ATPAX = ATP
Dengan penyelesaian matriks adalah : X = (ATPA)-1ATPL
6. Menyusun matrik A, P, L L = Vektor Observasi A = Matriks Desain X = Vektor Parameter P = Matriks Bobot
7. Menyusun persamaan penyelesaian matriks dengan inversi
Matriks yang telah disusun dari persamaan normal dapat dilakukan penyelesain matriks seperti berikut:
X = (ATPA)-1ATPL
Keterangan:
X = Vektor Parameter P = Matriks Bobot
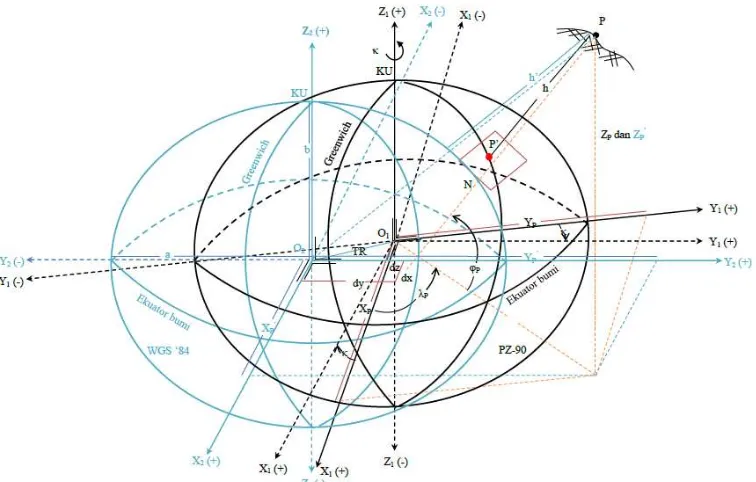
8. Melakukan transformasi dari PZ-90 ke WGS 84
Gambar 2. Transformasi datum dari Pz-90 ke WGS 84
Keterangan gambar:
P = 45o
φP = 50o
h = 500 m
P = titik di atas permukaan bumi
1. Elemen datum PZ-90 2. Elemen datum WGS 84
X1 = sumbu X pada datum PZ-90 X2 = sumbu X pada datum WGS 84 Y1 = sumbu Y pada datum PZ-90 Y2 = sumbu Y pada datum WGS 84 Z1 = sumbu Z pada datum PZ-90 Z2 = sumbu Z pada datum WGS 84
ω = rotasi terhadap sumbu X θ = rotasi terhadap sumbu Y
= rotasi terhadap sumbu Z
dz = -0,90 ± 0,33 m ds = -0,12 ± 0,06 m
ω = 0 θ = 0
= -0,16” ± 0,01 “
Rumus umum untuk transformasi datum PZ-90 ke datum WGS 84:
[ ]
9. Melakukan transformasi dari geodetik ke kartesi 3D X = (N+h) cos ϕcos
Arti notasi yang digunakan:
h = tinggi diatas ellipsoid (tinggi geometric) N = jari-jari kelengkungan prime vertical
Φ = lintang geodetik = bujur geodetik
10.Melakukan transformasi dari kartesi 3D ke bidang proyeksi UTM Ciri Sistem Proyeksi UTM :
1. Silinder, transversal, secant, konform
2. Memotong bola bumi di 2 meridian standard, k = 1 3. Lebar zone 6 °, sehingga bumi dibagi dalam 60 zone 4. meridian tengah tiap zone k=0,9996
5. Elipsoid referensi GRS 67
6. Absis semu ( T ) : 500.000 m ± X 7. Ordinat semu ( U ) : 10.000.000 m - Y
Wilayah Indonesia tercakup dalam zone no. 46 s.d. 54 dengan bujur meridian tengahnya (B) sebagai berikut :
zone2 B0
1. 9 wilayah (zone) dimulai dari 90° BT
2. Sampai dengan 144° BT, dengan batas paralel 10° LU dan 15° LS dengan 4 satuan daerah L, M, N, dan P.
3. Setiap zone berukuran 6° bujur x 8° lintang.
5. Setiap jalur selebar 8° lintang diberi kode huruf, dimulai dari 80° LS - 72° LS diberi huruf C dan berakhir dengan huruf X padajalur 72° LU dan 84° LU (huruf I dan O tidak digunakan). Pada jalur terakhir tersebut ukuran zone 6° bujur x 12° lintang.
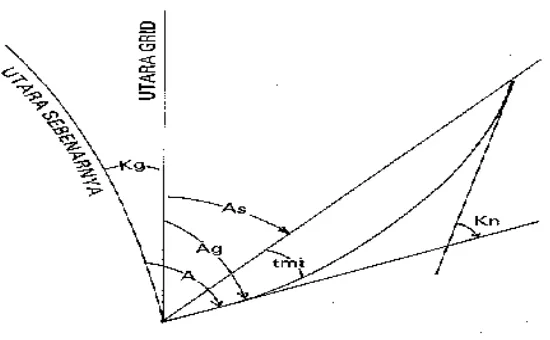
Konvergensi grid yaitu sudut antara utara grid dan utasa sebenarnya (US) : Kg = (XII).p + (XIII).p3 + (C5).p5
Ketentuan tanda :
a. Di belahan utara bumi
- Bila titik di sebelah timur Meredian Tengah, Kg positif
- Bila titik di sebelah barat Meredian Tengah, Kg negatif b. Di sebelah selatan bumi
- Bila titik di sebelah timur Meredian Tengah, Kg negatif
Angka perbesaran (faktor skala) : Angka perbesaran adalah salah satu besaran pengali untuk mendapatkan jarak di Grid dari Jarak di Ellipsoid.
di titik tersebut
Gambar 3. Konvergensi meridian pada proyeksi UTM Rumus Konvergensi Meridian Menggunakan Koordinat Geodetis (φ, ) :
γ" = (XIII) p + (XIII) p³ + (C5) p
p = 0.001 x ∆ ”
Daftar Pustaka
Sunantyo T.A., 2000, Diktat Pengentar Survei Pengamatan Satelit GPS, Jurusan Teknik Geodesi, Fakultas Teknik Universitas Gadjah Mada, Yogyakarta.