BAB 4
IMPLEMENTASI DAN EVALUASI
Pada bab ini dijelaskan mengenai implementasi dari sistem dan juga evaluasi dari hasil data yang telah didapat dari sistem penelitian ini.
4.1. Spesifikasi Sistem
Spesifikasi dari sistem ini dibagi menjadi dua bagian, yaitu spesifikasi perangkat keras dan perangkat lunak yang mendukung sistem dari penelitian ini. 4.1.1. Spesifikasi Sistem Perangkat Keras
Ada beberapa komponen yang digunakan pada implementasi pengujian sistem penelitian GPS Data Logger ini, yaitu :
Mikrokontroler ATMega 162, yang merupakan keluarga AVR, dimana dalam penelitian ini digunakan sebagai otak dari sistem secara keseluruhan.
MMC (MultiMedia Card) sebagai alat penyimpanan data yang telah didapat dari GPS.
GPS Receiver sebagai alat yang dapat menangkap sinyal yang dipancarkan dari satelit, yang kemudian datanya disimpan di dalam MMC. IC komunikasi serial MAX 232, yang berfungsi untuk komunikasi secara
serial antara ATMega 162 dengan komputer dan dengan GPS receiver. Penggunaan DB9 sebagai pengkoneksi antara sistem dengan komputer
Tegangan yang diberikan pada sistem adalah sebesar 12 Volt DC. Pada penelitian ini, sumber tegangan berasal dari aki (ACCU/12 V, 3 A).
Tabel 4.1. Daftar Komponen
No Nama Komponen Tipe / Ukuran Jumlah
1. Mikrokontroler AVR ATMega 162 1
2. Dual EIA-232 Driver/Receiver Max 232 1
3. Regulator LM 7805 – 5V 2 CX 1117 – 3.3V 1 4. Kristal 8.000 MHz 1 5. Kapasitor 22 pF 2 10 µF 3 1 µF 5 6. Resistor 120 Ω 4 220 Ω 8 10 KΩ 1 7. LED
Merah Super Bright 1
Merah 1
Biru Super Bright 1 Putih Super Bright 1
8. Konektor DB-9 Female 1 PS/2 Female 1 Jack Adaptor 1 MMC 1 9. MMC 128 MB 1 10. GPS US GlobalSat BR-355 1 11. Batere Aki – 12V, 3A 1
4.1.2. Spesifikasi Sistem Perangkat Lunak
Selain perangkat keras, bagian yang penting dalam penelitian ini adalah perangkat lunak yang dapat membantu mikrokontroler menjalankan sistem secara keseluruhan. Berikut adalah perangkat lunak yang digunakan pada penelitian ini.
Code Vision AVR (CVAVR) yang merupakan sebuah compiler yang berisi perintah-perintah untuk membantu AVR menjalankan sistem secara keseluruhan.
Dengan memanfaatkan Hyper Terminal pada Windows XP untuk melihat hasil data yang telah disimpan pada MMC dan dapat disimpan dalam format teks (.txt).
Circuit Maker digunakan untuk mendesain jalur komponen yang terdapat pada papan PCB.
4.2. Implementasi Sistem
Pada subbab ini akan dijelaskan beberapa prosedur yang harus disiapkan sebelum melakukan implementasi pada sistem.
4.2.1. Prosedur Operasional
Langkah-langkah persiapan sebelum melakukan implementasi sistem. 1. Setting peralatan (On The Road)
Persiapan ini dilakukan sebelum pengambilan data. a. GPS
Letakkan GPS receiver jauh dari rangkaian atau peralatan elektronik lainnya.
Pastikan lampu indicator pada receiver berkedip (jika belum berkedip, maka receiver belum mendapat sinyal yang dipancarkan oleh satelit).
b. Power Supply (Aki kering 12V/5A)
Pasang jack adaptor pada aki ke rangkaian. Pastikan seluruh LED menyala (sesaat). 2. Setting peralatan (Off The Road)
Persiapan ini dilakukan setelah pengambilan data dan data yang diperoleh akan ditampilkan ke monitor.
a. Power Supply (Aki kering 12V/5A)
Pasang jack adaptor pada aki ke rangkaian
Pastikan ketiga LED menyala untuk sesaat dan hanya LED putih yang akan menyala terus
b. Kabel Serial
Hubungkan kabel serial dari rangkaian ke PC c. PC (Windows XPTM)
Aktifkan Hyper Terminal pada PC
Klik Capture>Start pada Hyper Terminal. Simpan file data pada folder yang diinginkan.
Tekan tombol enter, agar AVR mendapat sinyal interrupt serial. Klik Capture>Stop pada Hyper Terminal.
Buka file yang telah di capture pada notepad.
4.2.2. Implementasi Sistem
Sebelum melakukan implementasi, ada beberapa hal yang perlu diperhatikan untuk me-logging data pada MMC.
4.2.2.1. Kapasitas Memori pada MMC
Pada sistem ini banyaknya data yang dapat diterima pada MMC hanya sebesar 4GB. Dengan kata lain jika menggunakan MMC dengan kapasitas memori sebesar 4GB, dapat menyimpan hingga address terakhir pada MMC (00000000-FFFFFFFF). Hal ini disebabkan karena keterbatasan pada library MMC yang digunakan pada penelitian ini.
Library MMC yang dipergunakan pada penelitian ini mempunyai satu fungsi khusus yang bertugas untuk menyalin keseluruhan isi buffer pada memori microcontroller kepada memori sector MMC. Pengalamatan sektor ini mempergunakan sebuah perintah khusus yang dijabarkan pada library tersebut sebagai:
int write_buffer_to_mmc(unsigned int addH, unsigned int addL) Dengan contoh pemakaian seperti,
Write_buffer_to_mmc(0xFFFF, 0xFFFF);
Dimana kedua parameter yang dipergunakan dalam perintah tersebut merupakan alamat awal dari sector yang dituju dan juga menggambarkan kapasitas maksimal dari jumlah memori MMC yang dapat dipergunakan.
Sebuah variabel integer merupakan sebuah variabel yang mengambil space memori sebesar dua byte dan dapat menampung nilai baik positif maupun negatif. Sebuah integer
dengan tipe unsigned hanya dapat menampung nilai positif dengan nilai maksimum yang lebih besar karena dapat mempergunakan ukuran keseluruhan dari dua byte yang dipergunakan.
Fungsi penulisan MMC yang dipergunakan pada penelitian ini mempergunakan dua buah variabel bertipe unsigned integer (addH dan addL) untuk memberikan pengalamatan pada lokasi memori yang dituju. Secara keseluruhan, alamat memori yang dapat dipanggil mempunyai ukuran keseluruhan empat byte yang dapat digambarkan sebagai berikut:
addH 0x0000 – 0xFFFF 0000000000000000 – 1111111111111111 addL 0x0000 – 0xFFFF 0000000000000000 – 11111111111111111 Sehingga menjadikan alamat maksimal menjadi: 0xFFFFFFFF atau 1111111111111111
Dimana jika diubah menjadi nilai decimal adalah 4.294.967.295 yang mengindikasikan bahwa fungsi tersebut hanya dapat mengakses memori sebesar 4 Gigabyte.
Namun tidak disarankan menggunakan MMC dengan kapasitas memori yang menyentuh ukuran sebesar GigaByte (GB). Berdasarkan perhitungan yang dibuat, hanya dengan MMC yang memiliki kapasitas memori MegaByte dapat menampung hingga bulanan, bahkan tahunan. Selain itu, MMC dengan kapasitas memori sebesar GB, dapat dikatakan masih tergolong mahal. Berikut diberikan perhitungan dan
waktu yang dapat digunakan oleh MMC hingga dapat memenuhi seluruh sektor yang terdapat di dalamnya, berdasarkan kapasitas memori dan interrupt timer yang diberikan pada sistem.
4.2.2.1.1. Formula Perhitungan
Berikut merupakan formula perhitungan untuk kapasitas waktuk penyimpanan data pada MMC. Hal ini dimaksudkan sebagai saran bahwa penggunaan MMC berkapasitas MegaByte saja, dapat menampung sejumlah data dengan waktu yang cukup lama.
=512 ÷ 60 × 60( ) ( )× 24
x = Kapasitas waktu untuk menyimpan data pada MMC M = Kapasitas memori pada MMC
512 = Kapasitas per sektor (address) pada MMC (byte) i = nilai interrupt timer yang diberikan pada sistem 60(1) = jumlah detik per menit
60(2) = jumlah menit per jam
4.2.2.1.2. Kapasitas Waktu
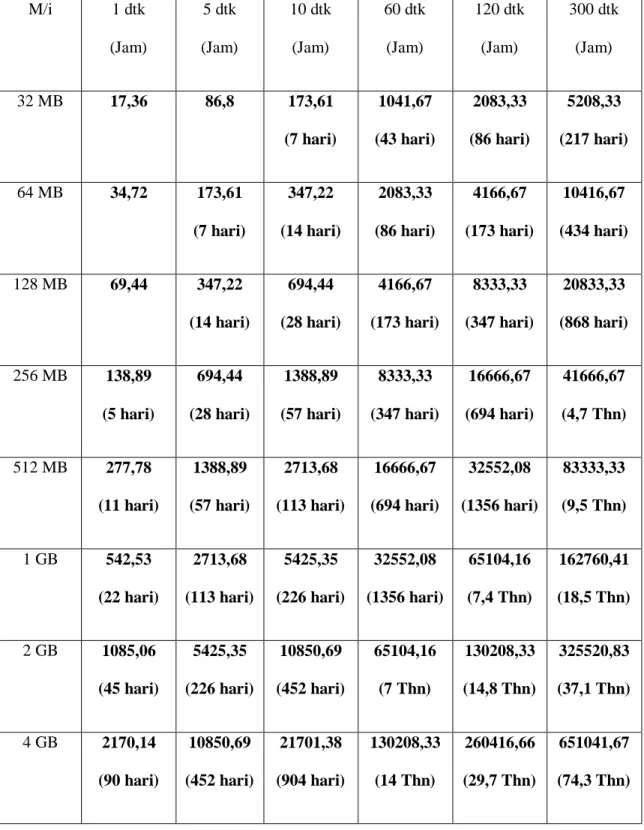
Tabel 4.2. Perbandingan data yang dapat memenuhi address MMC
M/i 1 dtk (Jam) 5 dtk (Jam) 10 dtk (Jam) 60 dtk (Jam) 120 dtk (Jam) 300 dtk (Jam) 32 MB 17,36 86,8 173,61 (7 hari) 1041,67 (43 hari) 2083,33 (86 hari) 5208,33 (217 hari) 64 MB 34,72 173,61 (7 hari) 347,22 (14 hari) 2083,33 (86 hari) 4166,67 (173 hari) 10416,67 (434 hari) 128 MB 69,44 347,22 (14 hari) 694,44 (28 hari) 4166,67 (173 hari) 8333,33 (347 hari) 20833,33 (868 hari) 256 MB 138,89 (5 hari) 694,44 (28 hari) 1388,89 (57 hari) 8333,33 (347 hari) 16666,67 (694 hari) 41666,67 (4,7 Thn) 512 MB 277,78 (11 hari) 1388,89 (57 hari) 2713,68 (113 hari) 16666,67 (694 hari) 32552,08 (1356 hari) 83333,33 (9,5 Thn) 1 GB 542,53 (22 hari) 2713,68 (113 hari) 5425,35 (226 hari) 32552,08 (1356 hari) 65104,16 (7,4 Thn) 162760,41 (18,5 Thn) 2 GB 1085,06 (45 hari) 5425,35 (226 hari) 10850,69 (452 hari) 65104,16 (7 Thn) 130208,33 (14,8 Thn) 325520,83 (37,1 Thn) 4 GB 2170,14 (90 hari) 10850,69 (452 hari) 21701,38 (904 hari) 130208,33 (14 Thn) 260416,66 (29,7 Thn) 651041,67 (74,3 Thn)
Tabel di atas menjelaskan banyaknya data yang dapat diterima oleh MMC berdasarkan jam. Dengan kata lain, jika MMC secara terus-menerus menerima data, maka address pada MMC akan terpenuhi dalam kurun waktu tersebut. Berdasarkan penelitian yang dilakukan, pengiriman barang disekitar Indonesia, dengan melalui jalur darat, tidak lebih dari 2 pekan (14 hari), untuk sekali perjalanan. Oleh karena itu, penggunaan MMC pada sistem ini cukup berkapasitas Megabyte saja.
4.2.2.2. Kondisi Pengambilan Data
Penggunaan GPS receiver berkaitan erat dengan dua kondisi, cuaca dan lokasi pengambilan data. Dari kedua kondisi tersebut dapat dicabangkan kembali menjadi beberapa sub-kondisi, seperti berikut.
4.2.2.2.1. Cuaca
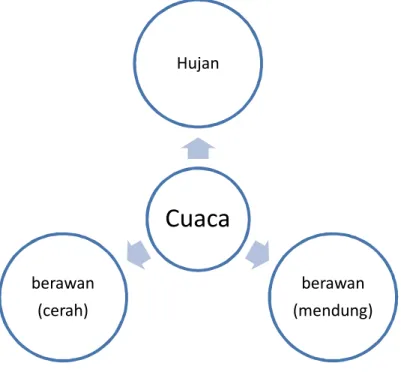
Gambar 4.1. Sub-kondisi Cuaca
Cuaca
Hujan berawan (mendung) berawan (cerah)Gambar di atas merupakan beberapa sub-kondisi dari cuaca yang sering terjadi di Indonesia. Hal tersebut dapat menyebabkan GPS receiver dapat menerima data saat pertama kali (Time to First Fix) dengan baik atau tidak. Hal ini dikarenakan receiver menangkap sinyal yang dipancarkan oleh satelit. Jika satelit tertutup oleh awan, maka receiver akan membutuhkan beberapa saat untuk menangkap sinyal satelit yang tertutup oleh awan (terutama awan mendung). Begitu pun pengambilan data pada saat sedang terjadi hujan, receiver akan mendapat kesulitan untuk menangkap sinyal yang dipancarkan oleh satelit, bahkan ada kemungkinan untuk tidak dapat menangkap sinyal satelit satu pun.
Jika data fix pertama telah di dapat, maka receiver akan terus mengunci sinyal yang dipancarkan oleh satelit. Jika pada saat pengambilan data keadaan cuaca berubah, misalnya cerah ke hujan, maka data yang diterima oleh receiver akan mendapat error yang tidak dapat diduga besarnya. Hal ini dikarenakan adanya perubahan pada magnetic field, yang disebabkan berkumpulnya ion positif dan ion negatif pada awan yang mendung, hingga sinyal yang diterima oleh receiver dari satelit dapat berubah (berbelok).
4.2.2.2.2. Lokasi
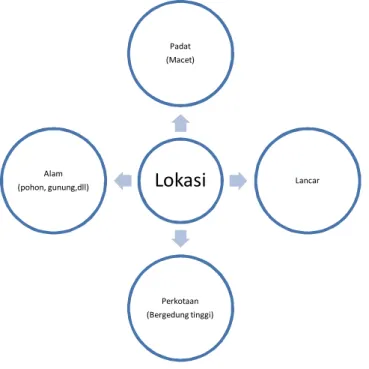
Gambar 4.2. Sub-kondisi lokasi pengambilan data
Sama halnya dengan kondisi cuaca, lokasi pengambilan data juga berpengaruh cukup besar dalam penerimaan koordinat posisi oleh receiver secara tepat dan benar. Jika sinyal yang dipancarkan oleh satelit tertahan oleh benda solid yang tidak dapat ditembus, maka receiver tidak dapat menerima sinyal tersebut. Receiver akan menerima sinyal dari satelit, jika dipantulkan. Akan tetapi, hal ini akan menyebabkan perbedaan koordinat yang diterima oleh GPS.
Lokasi
Padat (Macet) Lancar Perkotaan (Bergedung tinggi) Alam (pohon, gunung,dll)Gambar 4.3. Sinyal yang dipancarkan oleh satelit (Sumber: http://www.pocketgpsworld.com/howgpsworks.php)
Gambar di atas menjelaskan bahwa sinyal yang dipantulkan oleh satelit karena gedung bertingkat juga diterima oleh receiver. Hal tersebutlah yang dapat menyebabkan adanya penggabungan antar dua informasi koordinat posisi yang diberikan oleh satelit. Begitupun jika sinyal yang dipancarkan oleh satelit bertemu atau tertutup dengan benda solid lainnya, yang memang tidak dapat ditembus oleh sinyal, melainkan dipantulkan.
GPS receiver memiliki radius pengambilan data, tergantung dari chipset yang diintegrasikan di dalamnya. Pada penelitian ini digunakan chipset engine SiRF star III, dimana memiliki radius area penerimaan data sejauh 5 meter (maksimum) atau 10 meter (minimum). Jika pada saat menerima data, kondisi jalan raya padat (macet), maka data yang diterima oleh receiver akan tampak seperti tidak berubah. Dengan kata lain, pada penelitian ini, jika kendaraan tidak bergerak sejauh 5 meter selama batas interrupt yang diberikan, maka koordinat yang diberikan oleh satelit tetap sama seperti koordinat posisi sebelumnya.
4.2.2.3. Implementasi di Lapangan
4.2.2.3.1. Pengambilan Data (On The Road)
Gambar 4.4. Setting peralatan sebelum pengambilan data
Pada saat sistem mendapat catu daya dari sumber tegangan, maka rangkaian akan memberikan informasi, dengan menghidupkan LED merah. Seperti yang telah dijelaskan pada bab sebelumnya, setelah sistem mendapat tegangan, maka mikrokontroler akan mengaktifkan komunikasi serial dan memastikan bahwa MMC telah siap digunakan. Jika hal tersebut belum terpenuhi, maka sistem tidak bekerja, dikarenakan kedua hal tersebutlah sangatlah penting pada sistem ini. Komunikasi serial berfungsi untuk menyamakan sinyal yang dikirim oleh GPS receiver ke AVR yang nantinya di simpan di MMC. Seperti yang diketahui, MMC berfungsi untuk menyimpan data, dimana pada penelitian ini data yang diterima merupakan koordinat posisi dan waktu yang dikirim oleh satelit, dan juga jarak tempuh yang dihitung oleh mikrokontroler. Ketika GPS receiver menerima tegangan, maka lampu indikator akan menyala. Hal tersebut juga dapat diilihat pada rangkaian, yang diinformasikan melalui LED merah (super bright). Jika kedua lampu indikator tersebut telah
berkedip, maka receiver telah menerima data dari sinyal yang dipancarkan oleh satelit. Pada saat sistem akan mengambil data yang diterima oleh receiver, maka sistem akan menginformasikannya dengan mengaktifkan LED biru (super bright). Dimana data tersebut akan disimpan sementara di sektor [y] (memori internal AVR), yang nantinya akan dilakukan proses perhitungan jika mendapat data koordinat posisi kedua. Setelah data yang diterima memenuhi kapasitas ukuran per sektor pada MMC (512byte), maka data tersebut akan dikirim dan disimpan ke MMC. Saat hal tersebut terjadi, maka sistem akan menginformasikannya dengan LED putih (super bright). Penginformasian melalui LED yang diberikan pada rangkaian akan terus terjadi, pada saat sistem menerima data dari receiver dan mengirim data ke MMC.
4.2.2.3.2. Penyimpanan data (Off The Road)
Gambar 4.5. Setting peralatan saat data akan ditampilkan ke komputer
Pada saat pengambilan data selesai dilakukan (sampai tujuan), sistem akan terus mengambil data sebelum diberikan interrupt eksternal, dimana pada rangkaian
diberikan sebuah tombol untuk melakukan hal tersebut. Seperti yang dijelaskan pada bab sebelumnya, ketika sistem menerima interrupt eksternal, mikrokontroler akan memeriksa apakah sektor terakhir pada MMC sudah mendapat data sebesar 512 byte atau belum. Jika sektor terakhir tersebut belum terpenuhi data sebesar 512 byte, maka sektor tersebut akan dipenuhi dengan karakter bintang (*).
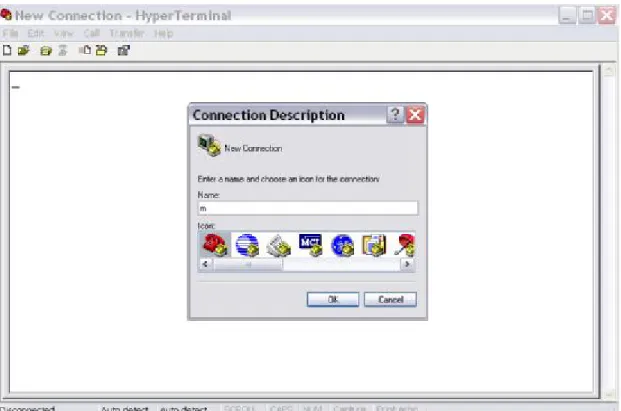
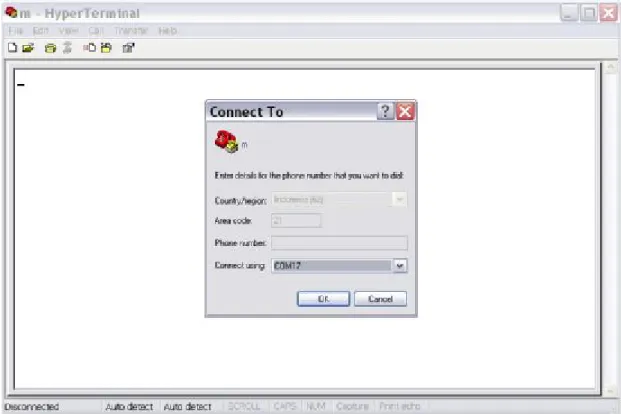
Setelah dilakukan interrupt eksternal, maka data siap ditampilkan ke komputer. Untuk menampilkan data ke komputer, rangkaian penelitian ini juga membutuhkan power supply, dimana pada penelitian ini digunakan Aki motor 12V/5A, seperti yang sudah disebutkan di atas. Sebelum menghubungkan power supply ke rangkaian, ada beberapa hal yang harus dilakukan sebelumnya. Pertama, hubungkan kabel serial antara PC dan rangkaian. Seperti yang telah dijelaskan pada bab sebelumnya, kabel serial ini digunakan untuk mengirim data yang disimpan pada MMC ke PC, yang kemudian datanya dapat disimpan untuk penelitian lebih lanjut. Kemudian hal kedua yang harus dilakukan adalah, buka program Hyper Terminal yang terdapat pada Windows XPTM. Ketika Hyper Terminal dibuka, maka akan ditawarkan untuk membuat koneksi baru. Isilah form name (bebas), dan tekan tombol OK, seperti yang dilihat pada gambar 4.6.
Gambar 4.6. Hyper Terminal New Connection
Setelah tombol OK ditekan, maka program tersebut akan bertanya koneksi apa yang akan digunakan. Karena pada penelitian ini digunakan kabel serial, maka pilihlah jalur koneksi COM yang sesuai dengan instalasi yang telah dilakukan sebelumnya untuk memenuhi jalur komunikasi serial ini. Setelah jalur koneksi disesuaikan, tekan kembali tombol OK. Hal tersebut dapat dijelaskan pada gambar di bawah ini.
Gambar 4.7. Hyper Terminal Connect To
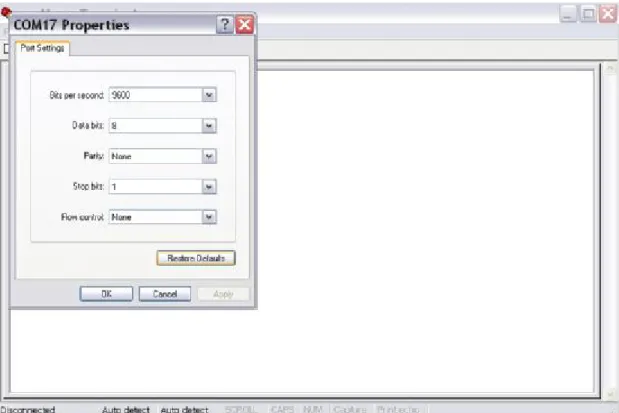
Setelah memilih jalur koneksi yang digunakan, maka Hyper Terminal akan memberikan properties dari jalur koneksi yang digunakan, yang dapat disesuaikan berdasarkan kebutuhan. Namun, pada penelitian ini disarankan menggunakan default setting dari Hyper Terminal dengan menekan tombol Restore Default. Hal ini dikarenakan baud rate pada Hyper Terminal adalah 9600, sesuai dengan baud rate pada PC.
Gambar 4.8. Properties jalur koneksi pada Hyper Terminal
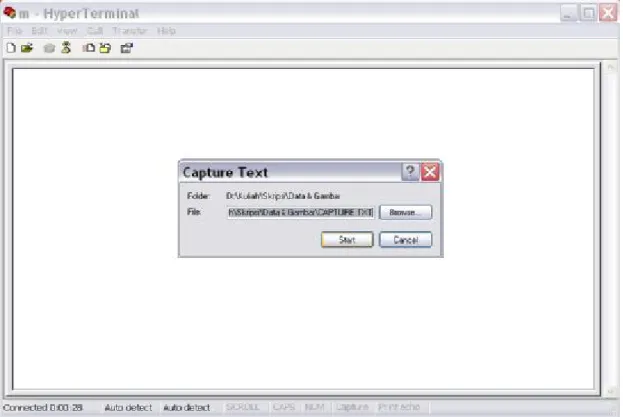
Setelah mengatur jalur koneksi pada Hyper Terminal, data yang terdapat pada MMC dapat disimpan dengan cara menekan tombol Transfer>Capture Text. Kemudian pilihlah sebuah folder pada PC, untuk menyimpan data yang terdapat pada MMC, dengan cara menekan tombol Browse, dengan catatan file yang akan disimpan diberi format data (extention) teks (.txt), sehingga dapat dibaca melalui notepad. Setelah menentukan sebuah folder untuk menyimpan data, tekanlah tombol Start.
Gambar 4.9. Capture Text pada Hyper Terminal
Setelah persiapan penyimpanan data dari MMC pada PC selesai dilakukan, maka hubungkanlah jack pada power supply ke rangkaian. Kemudian, perhatikanlah pada Hyper Terminal apakah timbul tulisan MMC not present atau MMC online. MMC not present mengartikan bahwa MMC yang dipasang di rangkaian tidak terhubung dengan benar dan terdapat kemungkinan bahwa data yang telah diambil selama perjalanan tidak tersimpan (jika dalam perjalanan rangkaian mendapat guncangan, yang menyebabkan MMC tidak terhubung dengan baik oleh connector-nya). Jika hal ini terjadi, hubungkan kembali MMC pada connector-nya dengan baik, hingga timbul tulisan MMC online pada Hyper Terminal.
Gambar 4.10. Pengiriman data dari rangkaian ke PC
Jika telah terdapat tulisan MMC online, maka sistem telah siap mengirimkan data yang terdapat pada MMC. Seperti yang telah dijelaskan sebelumnya, jika belum terjadi penekanan tombol Enter pada keyboard, maka sistem pada penelitian ini tidak akan mengirim data yang terdapat pada MMC. Jika terdapat penekanan tombol Enter, maka dikirimlah informasi ke AVR, bahwa sistem telah mendapat interrupt serial. Kemudian AVR akan mengirim data dari MMC ke PC. Tetapi data yang ditampilkan di monitor merupakan sebagian data yang terdapat di dalam MMC, seperti yang terdapat pada gambar 4.11. Oleh karena itu, sebelum menampilkan data ke PC, tools Capture Text pada Hyper Terminal harus diaktifkan.
Gambar 4.11. Data yang dikirim oleh MMC ke PC melalui Hyper Terminal Setelah Hyper Terminal menampilkan sebagian data dari MMC, tekanlah tombol Transfer>Capture Text>Stop. Hal ini dilakukan agar pada saat data berikut yang akan ditampilkan ke monitor dari MMC, data tersebut tidak langsung ditampilkan. Jika hal ini tidak dilakukan, maka data selengkapnya yang dikirim oleh MMC tidak dapat dilihat dengan format teks (.txt). Untuk melihat data lengkap yang dikirim oleh MMC, bukalah nama file pada folder yang telah disiapkan sebelumnya. 4.3. Evaluasi
Hasil data yang didapat dari penelitian ini menggunakan dua pengukuran pertama, yaitu Time to First Fix (TTFF) dan hasil data kesuluruhan (keberangkatan-sampai tujuan). TTFF merupakan waktu receiver menerima data dari satelit untuk pertama kalinya, dimana pengujian ini dilakukan di beberapa tempat berdasarkan
kondisi dan sub-kondisi yang telah dijabarkan sebelumnya. Sedangkan hasil data kesuluruhan merupakan informasi posisi yang diberikan oleh satelit dan jarak tempuh yang dihitung oleh mikrokontroller.
4.3.1. Evaluasi berdasarkan TTFF
Pengujian yang pertama kali dilakukan adalah berdasarkan TTFF. Hal ini dikarenakan komponen terpenting pada penelitian ini adalah GPS receiver, yang menangkap sinyal dari satelit. Cepat atau lambatnya data yang diterima oleh receiver, bergantung pada beberapa hal, kondisi seperti yang telah dijelaskan di atas dan juga kualitas dari GPS receiver itu sendiri. TTFF atau Time to First Fix merupakan kecepatan daya tangkap sinyal yang dipancarkan satelit oleh receiver. Namun data yang diberikan di bawah ini, bukanlah waktu tetap saat pengambilan data (TTFF) berikut dilakukan, melainkan sebagai perkiraan waktu rata-rata yang dibutuhkan receiver saat menerima data pertama kali dari satelit.
4.3.1.1. Lokasi Bergedung
Tabel 4.3. TTFF pada lokasi bergedung
Lokasi Sub-Kondisi Waktu yang didapat Plasa Syahdan Bergedung 1 menit 04.43 detik Plasa Syahdan Bergedung 05.08 detik Plasa Syahdan Bergedung 04.46 detik Plasa Syahdan Bergedung 04.14 detik
Area Parkir Motor Syahdan Bergedung 11.07 Area Parkir Motor Syahdan Bergedung 14.74
Waktu rata-rata 17.32 detik
Berdasarkan tabel di atas, dapat dilihat pada saat pertama kali receiver dihubungkan ke rangkaian, TTFF yang di dapat cukup besar yaitu 1 menit 4,43 detik. Hal ini disebabkan karena receiver yang digunakan sudah cukup lama tidak digunakan, sehingga receiver tersebut perlu beberapa saat untuk melakukan inisialisasi terhadap sistem yang berada pada dirinya sendiri dan juga pengambilan data yang dilakukan di lokasi dengan gedung bertingkat, maka receiver mengalami kesulitan untuk mencari sinyal yang dipancarkan oleh satelit. Namun, pada saat pengujian selanjutnya, receiver mendapat TTFF dengan cukup cepat.
4.3.1.2. Keadaan Terhalang Benda Solid
Pengujian dengan kondisi ini dilakukan untuk mengetahui apakah sinyal yang dipancarkan oleh satelit dapat diterima oleh receiver atau tidak. Selain itu hasil dari pengujian ini juga dapat memberikan ketahanan resistansi pada receiver.
Tabel 4.4. TTFF dengan keadaan receiver terhalang oleh benda padat
Kondisi Waktu
Dihalangi oleh kayu 08.36 detik Diletakkan di dalam kotak kardus 11.32 detik Diletakkan di bawah mobil 07.24 detik Diletakkan di dalam mobil box 1 menit 09.35 detik
Berdasarkan tabel di atas, receiver tetap mendapat sinyal yang dipancarkan oleh satelit dalam keadaan tertutup (terhalangi) benda solid. Namun, waktu penerimaan sinyal yang dipancarkan satelit ke receiver lebih panjang jika dibandingkan dengan kondisi pengambilan data pada ruang terbuka. Pencarian sinyal terlama pada kondisi terhalang adalah pada saat receiver diletakkan di dalam mobil box yang terkunci rapat. Receiver tetap mendapat sinyal, meskipun terhalang oleh benda padat yang tertutup rapat (aluminium).
4.3.1.3. Berdasarkan keadaan cuaca
Tabel 4.5. TTFF berdasarkan cuaca
Cuaca Waktu
Cerah berawan 5,116 detik Mendung 9.192 detik Hujan 11,374 detik
Data di atas merupakan pengujian TTFF berdasarkan keadaan cuaca. Berdasarkan percobaan yang telah dilakukan TTFF terlama pada saat cuaca hujan, dimana pada saat pengujian berlangsung, terdapat sedikit gemuruh petir. Sedangkan TTFF tercepat pada saat cuaca cerah berawan.
4.3.1.4. Berdasarkan jenjang waktu tidak terpakai
Tabel 4.6. TTFF berdasarkan jenjang waktu tidak terpakai (nilai TTFF dalam detik)
no.
waktu
5 menit 30 menit 1 jam
jam TTFF Jam TTFF Jam TTFF
1 18.20 4.03 13.45 20.36 9:00 99.83 2 18.25 4.37 14.15 15.55 10:00 10.41 3 18.30 3.71 14.45 17.38 11:00 72.19 4 18.35 7.55 15.15 13.72 12:00 9.00 5 18.40 3.27 15.45 14.79 13:00 29.00 6 18.45 32.98 16.15 31.26 14:00 11.32 7 18.50 31.95 16.45 19.47 15:00 26.01 8 18.55 5.16 17.15 36.44 16:00 5.41 9 19.00 31.57 17.45 11.07 17:00 10.03 10 19.05 2.48 18.15 12.06 18:00 32.92 waktu rata-rata TTFF : 12.707 19.21 30.612
Dari data yang kami dapatkan lama TTFF (Time To First Fix) bergantung pada lamanya penggunaan kembali GPS receiver, setelah sebelumnya tidak
dipergunakan selama jangka waktu yang tercatat. Dimana pada pengambilan data ini GPS receiver tidak terhalang benda apapun. Sehingga dari data diatas dapat ditarik kesimpulan, jika GPS receiver tidak terpakai dengan jenjang waktu yang lama, maka inisialisasi pengambilan data fix pertama akan membutuhkan waktu yang cukup lama pula.
4.3.2. Evaluasi berdasarkan besarnya Interrupt Timer
Berdasarkan tabel di bawah, persentase keberhasilan yang paling baik untuk sistem ini sebesar 7 detik. Pengujian ini dilakukan hanya di daerah perkotaan yang mobilisasi kendaraannya cukup padat, Jakarta. Maka dapat ditarik kesimpulan, hasil penyimpanan dan perhitungan data pada sistem dapat dilakukan dengan baik untuk pengambilan data di lokasi perkotaan yang mobilisasi kendaraannya cukup padat dengan interrupt timer maksimum sebesar 7 detik.
Tabel 4.13. Persentase keberhasilan interrupt timer yang diberikan pada sistem Interrupt timer Persentase keberhasilan
7 detik 100%
15 detik 84%
30 detik 58%
1 menit 52%
4.3.3. Evaluasi berdasarkan koordinat posisi dan jarak
Inti dari penelitian ini adalah mendapatkan sebuah informasi koordinat posisi dan jarak tempuh yang dapat disimpan di dalam MMC.
4.3.3.1.Evaluasi berdasarkan besarnya kesalahan perhitungan dalam persen Penelitian ini terdapat perhitungan jarak yang di tempuh oleh kendaraan. Pada subbab ini dijelaskan mengenai rata-rata error pada perhitungan yang dilakukan oleh sistem. Percobaan untuk evaluasi pada subbab ini dilakukan di parkir timur kampus Syahdan, Universitas Bina Nusantara, dengan jarak tiap percobaan sejauh 60-70 meter, dengan pengambilan data setiap 10 meter (data terlampir).
Tabel 4.7. Error rate perhitungan jarak
Perc.
Jarak sebenarnya (meter)
Jarak yang didapat (meter)
Error rate
Error rate (koordinat 1 dan 2 dihilangkan) 1 70 42,68 39,02% 73,04% 2 60 66,08 10,13% 28,45% 3 60 60,18 0,3% 25.6% 4 60 37,91 36,81% 50,5% 5 60 90,70 51,16% 29,9%
Rata-rata error keseluruhan 27,48% 41,49%
Percobaan di atas dilakukan dengan cara mengambil data pada setiap titik, dimana jarak antar titik sejauh 10 meter. Interrupt timer pada tiap percobaan di atas sebesar 7 detik. Seperti yang terlihat pada tabel di atas, error rate dengan koordinat pertama dan kedua yang dihilangkan lebih besar jika dibandingkan dengan error rate dengan koordinat pertama dan kedua yang tidak dihilangkan. Hal ini disebabkan
karena kedua koordinat pertama tersebut, jauh menyimpang dengan jarak sebenarnya di lapangan, sehingga menutupi kekurangan jarak pada koordinat berikutnya. Kurangnya perhitungan jarak yang dilakukan oleh sistem pada penelitian ini disebabkan oleh beberapa hal, seperti algoritma perhitungan, perhitungan yang dilakukan oleh mikrokontroller, dan juga kesalahan koordinat yang disebabkan oleh banyak hal.
4.3.3.1.1. Ketidakstabilan data pada koordinat pertama dan kedua
Seperti yang telah dipaparkan sebelumnya koordinat pertama dan kedua selalu menyimpang jauh, sehingga menyebabkan perhitungan jarak menjadi bertambah besar. Hal tersebut dapat dilihat dari beberapa grafik di bawah ini.
Gambar 4.12. Grafik ketidakstabilan data untuk koordinat pertama dan kedua (1)
0 2 4 6 8 10 12 14 Ax is T itl e
Senayan 1
Jarak(m)Gambar 4.13. Grafik ketidakstabilan data untuk koordinat pertama dan kedua (2)
Gambar 4.13. Grafik ketidakstabilan data untuk koordinat pertama dan kedua (3)
0 5 10 15 20 25 30 35 40 45 50 Ax is T itl e
Senayan 2
Jarak(m)Jarak Google Earth(m)
0 20 40 60 80 100 120 140 160 Ax is T itl e
Senayan 3
Jarak(m)Gambar 4.13. Grafik ketidakstabilan data untuk koordinat pertama dan kedua (4) Beberapa grafik di atas berdasarkan pengujian di lapangan dengan jarak sebenarnya pada lapangan sebesar 50 meter. Dapat dilihat pada beberapa grafik di atas, setiap pengambilan data pertama dan kedua selalu mendapat penyimpangan yang cukup besar jika dibandingkan dengan data berikutnya. Oleh karena itu, untuk mendapatkan hasil total jarak dari pengambilan data yang baik, koordinat pertama dan kedua perlu dihilangkan.
0 5 10 15 20 25 30 35 Ax is T itl e
Senayan 4
Jarak(m)4.3.3.2. Perbandingan jarak tempuh antar beberapa informasi dengan tempat dan jarak yang sama
Pengujian ini dilakukan untuk mengetahui seberapa besar error yang diterima oleh receiver saat menerima data dari sinyal yang dipancarkan oleh satelit. Namun, penelitian ini tidak menitikberatkan pada ketepatan data koordinat posisi dan jarak tempuh, melainkan hanya menampilkan/menginformasikan kedua data tersebut pada saat sistem ini bekerja. Berikut merupakan beberapa tabel yang menampilkan hasil pengujian berdasarkan koordinat posisi dan jarak yang juga hasil jaraknya dibandingkan dengan Google Earth, dengan catatan hasil pada Google Earth bukan merupakan hasil yang sebenarnya pada saat pengujian di lapangan, melainkan hanya sebagai pembanding pengukuran jarak.
Tabel 4.8. Hasil data percobaan berdasarkan koordinat posisi dan jarak Waktu (UTC
time)
Koordinat Posisi
Jarak Tempuh Jarak Tempuh
Lintang Bujur (Google Earth)
11.35.00 613.1340 S 10648.3908 E 0 0 11.35.08 613.1373 S 10648.3945 E 12,07 meter 9.14 meter 11.35.16 613.1311 S 10648.3924 E 12,03 meter 12.06 meter 11.35.23 613.1277 S 10648.3924 E 6,30 meter 6.25 meter 11.35.31 613.1229 S 10648.3920 E 8,90 meter 8.87 meter 11.35.38 613.1197 S 10648.3920 E 5,97 meter 5.90 meter 11.35.46 613.1161 S 10648.3922 E 6,63 meter 6.65 meter 11.35.55 613.1119 S 10648.3921 E 7,72 meter 7.73 meter 1136.03 613.1084 S 10648.3919 E 6,58 meter 6.46 meter 11.36.11 613.1074 S 10648.3916 E 1,84 meter 1.90 meter Total jarak tempuh = 68,16 meter 64.96 meter
Error Rate jarak total= 36,32% 29,92%
Pengujian ini dilakukan di daerah Senayan, Jakarta Selatan, dengan jarak sebenarnya sebesar 50 meter. Dalam pengujian ini, interrupt timer yang diberikan pada sistem adalah per 5 detik. Interrupt timer pada saat proses pengujian berjalan dengan baik. Jika dilihat pada tabel di atas, pengambilan data terjadi setiap (rata-rata waktu) 7,5 detik. Hal ini terjadi dimungkinkan adanya data yang tidak valid sebelumnya, sehingga data tersebut dibuang oleh sistem.
Kondisi di lapangan pada saat pengujian ini berlangsung dalam keadaan ruang terbuka dan kondisi cuaca yang cerah dengan sedikit berawan. Namun, hal tersebut
tidak dapat menjadi sebuah jaminan, jika data yang diterima tidak mendapat error. Seperti yang dilihat pada tabel 4.7, total jarak tempuh yang dihitung oleh mikrokontroler adalah 68,16 meter, sedangkan jarak sebenarnya adalah 50 meter. Begitu pun dengan informasi koordinat posisi yang diberikan, juga mendapat sedikit kesalahan. Seperti yang tercantum pada tabel, error rate pada evaluasi dari percobaan pertama dalam kasus ini sebesar 36,32%.
Tabel 4.9. Hasil data percobaan berdasarkan koordinat posisi dan jarak kedua Waktu (UTC
time)
Koordinat Posisi
Jarak Tempuh Jarak Tempuh
Lintang Bujur (Google Earth)
11.44.27 613.1236 S 10648.4050 E 0 0 11.44.35 613.1357 S 10648.3920 E 47,08 meter 32.72 meter 11.44.43 613.1341 S 10648.3916 E 2.93 meter 3.03 meter 11.44.51 613.1327 S 10648.3907 E 3,00 meter 3.07 meter 11.44.58 613.1304 S 10648.3898 E 4,82 meter 4.55 meter 11.45.06 613.1287 S 10648.3891 E 3,46 meter 3.39 meter 11.45.13 613.1275 S 10648.3878 E 3,17 meter 3.27 meter 11.45.22 613.1251 S 10648.3870 E 4,51 meter 4.67 meter 11.45.30 613.1225 S 10648.3862 E 5,29 meter 5.01 meter 11.45.38 613.1180 S 10648.3879 E 8,29 meter 8.90 meter Total jarak tempuh = 82,67 meter 68.61 meter
Error Rate jarak total= 65,34% 37,22%
Sama halnya pada pengujian sebelumnya, data koordinat posisi pertama dan kedua terdapat kesalahan yang cukup signifikan. Namun, data selanjutnya yang di dapat sudah kembali normal. Kesalahan koordinat posisi pertama dan kedua tersebut,
menyebabkan perbedaan yang cukup jauh antara jarak sesungguhnya dengan jarak yang di dapat, sehingga error rate yang didapat cukup besar, 65,34%.
Tabel 4.10. Hasil data percobaan berdasarkan koordinat posisi dan jarak ketiga Waktu (UTC
time)
Koordinat Posisi
Jarak Tempuh Jarak Tempuh
Lintang Bujur (Google Earth)
11.49.55 0613.0715 S 10648.4213 E 0 0 11.50.02 0613.1395 S 10648.3865 E 149,33 meter 140.79 meter 11.50.10 0613.1411 S 10648.3883 E 0 meter 4.45 meter 11.50.17 0613.1396 S 10648.3866 E 3,55 meter 4.18 meter 11.50.25 0613.1365 S 10648.3844 E 7,34 meter 6.99 meter 11.50.32 0613.1331 S 10648.3869 E 6,25 meter 7.77 meter 11.50.40 0613.1283 S 10648.3887 E 8,86 meter 9.45 meter 11.50.49 0613.1221 S 10648.3895 E 11,52 meter 11.52 meter 11.50.57 0613.1188 S 10648.3907 E 6,06 meter 6.48 meter 11.51.05 0613.1133 S 10648.3940 E 10,24 meter 11.9 meter Total jarak tempuh = 203,27 meter 203.53 meter
Error Rate jarak total= 306,54% 307,06%
Begitu pun dengan hasil data percobaan ketiga. Pada tabel di atas dapat di lihat bahwa jarak antara koordinat posisi pertama dengan koordinat posisi kedua cukup signifikan, sehingga menyebabkan total jarak menjadi menyimpang jauh. Pada saat pengambilan data ketiga ini, kondisi cuaca di lapangan berawan (mendung).
Tabel 4.11. Hasil data percobaan berdasarkan koordinat posisi dan jarak keempat Waktu (UTC
time)
Koordinat Posisi
Jarak Tempuh Jarak Tempuh
Lintang Bujur (Google Earth)
11.56.01 613.1264 S 10648.3796 E 0 0 11.56.10 613.1356 S 10648.3918 E 29,53 meter 28.19 meter 11.56.17 613.1347 S 10648.3901 E 4,09 meter 3.54 meter 11.56.25 613.1347 S 10648.3890 E 1,50 meter 2.03 meter 11.56.32 613.1348 S 10648.3885 E 0,74 meter 0.94 meter 11.56.40 613.1275 S 10648.3871 E 13,71 meter 13.70 meter 11.56.47 613.1248 S 10648.3867 E 5,07 meter 5.07 meter 11.56.56 613.1205 S 10648.3879 E 7,91 meter 8.23 meter 11.57.04 613.1189 S 10648.3862 E 4,24 meter 4.24 meter 11.57.12 613.1148S 10648.3871 E 7,53 meter 7.80 meter Total jarak tempuh = 74,44 meter 73.74 meter
Error Rate jarak total= 48,88% 47,48%
Jika dilihat pada hasil pengujian keempat di lokasi dan dengan jarak tempuh yang sama, nilai error pada informasi data yang diterima berkurang, akan tetapi total jarak tempuh yang didapat hampir mendekati jarak tempuh sebenarnya. Percobaan ini dilakukan dengan kondisi cuaca di lapangan cerah berawan.
Dari beberapa pengujian dengan informasi posisi dan jarak tempuh yang sama, dapat disimpulkan, receiver GPS selalu mengalami kesalahan pada saat menerima informasi koordinat posisi pertama dan kedua. Hal ini disebabkan oleh beberapa hal, seperti error budget yang dimiliki oleh receiver, kondisi lapangan, dan
beberapa hal lain yang tidak diketahui sehingga menyebabkan adanya penyimpangan dalam penerimaan data dari satelit ke receiver.
4.3.3.3. Perbandingan jarak tempuh pada sistem dengan Google Earth
Pada subbab sebelumnya terdapat beberapa tabel hasil pengujian sistem untuk perhitungan jarak tempuh yang hasilnya juga dibandingkan dengan Google Earth. Dari pengujian di atas dapat dibandingkan prosentase keberhasilan perhitungan jarak dengan Google Earth.
Tabel 4.14. Perbandingan jarak tempuh (sistem) dengan Google Earth Jarak
Tempuh Jarak Tempuh
Perbandingan (System) (Google Earth)
36.32% 29.92% 1.21% 65.34% 37.22% 1.76% 306.54% 307.06% 0.99% 48.88% 47.48% 1.03% Total Perbandingan 1.2475%
Hasil jarak pada tabel di atas di ambil dari subbab sebelumnya. Dari hasil perhitungan, perbandingan perhitungan jarak antara sistem dengan Google Earth sebesar 1,2475%. Dengan kata lain, perhitungan jarak yang dilakukan oleh sistem, tidak jauh berbeda dengan perhitungan yang dilakukan oleh Google Earth. Pemilihan pembanding Google Earth dilakukan karena banyaknya pengguna (user) dari program freeware tersebut.
4.3.3.4.Evaluasi berdasarkan pengujian jarak tempuh yang panjang
Setelah melakukan pengujian sistem dengan jarak tempuh yang singkat, pengujian berikut yang dilakukan adalah berdasarkan jarak tempuh yang panjang. Hal ini dapat membuktikan apakah sistem tetap berjalan dengan baik dan benar atau mendapat kesalahan yang fatal, dengan jarak tempuh yang panjang. Pengujian dilakukan dengan menggunakan kendaraan pribadi Kampus Syahdan Universitas Bina Nusantara menuju Bogor, dengan interrupt timer sebesar 7 detik.
Dari hasil data yang di dapat, sistem tetap stabil dalam hal penyimpanan data yang diterima oleh receiver dari satelit. Dan mikrokontroller tetap stabil dalam melakukan perhitungan jarak antar koordinat. Namun bila dibandingkan dengan hasil perhitungan dari software Google Earth seperti yang dapat dilihat pada gambar 4.12 yang menghasilkan nilai perhitungan sebesar 65.416,22 meter masih terdapat selisih perhitungan sebesar 1.612,06 meter atau 2,46%.
4.3.3.5.Evaluasi berdasarkan cuaca dengan kondisi kendaraan tidak bergerak Tabel 4.15. Kendaraan tidak bergerak dengan cuaca hujan
Waktu (UTC time) Koordinat Posisi Jarak Tempuh Lintang Bujur 07.31.22 612.0339 S 10647.1174 E 0 meter 07.31.31 612.0340 S 10647.1172 E 18,11 meter 07.31.39 612.0343 S 10647.1168 E 1,50 meter 07.31.46 612.0345 S 10647.1166 E 0,74 meter 07.31.54 612.0345 S 10647.1164 E 0 meter 07.32.01 612.0345 S 10647.1162 E 0,74 meter 07.32.09 612.0344 S 10647.1162 E 0,22 meter 07.32.18 612.0343 S 10647.1161 E 0,13 meter 07.32.26 612.0341 S 10647.1161 E 0,36 meter 07.32.34 612.0339 S 10647.1160 E 0,36 meter 07.32.41 612.0337 S 10647.1160 E 0,36 meter 07.32.49 612.0335 S 10647.1160 E 0,32 meter 07.32.56 612.0334 S 10647.1160 E 0,22 meter 07.33.05 612.0333 S 10647.1160 E 0,13 meter 07.33.13 612.0332 S 10647.1160 E 0,22 meter 07.33.21 612.0331 S 10647.1160 E 0,13 meter 07.33.29 612.0331 S 10647.1160 E 0 meter 07.33.36 612.0331 S 10647.1160 E 0 meter 07.33.45 612.0332 S 10647.1161 E 0 meter 07.33.53 612.0332 S 10647.1161 E 0 meter 07.34.01 612.0332 S 10647.1160 E 0 meter 07.34.09 612.0333 S 10647.1160 E 0 meter 07.34.16 612.0334 S 10647.1159 E 0 meter 07.34.24 612.0334 S 10647.1159 E 0 meter 07.34.33 612.0334 S 10647.1160 E 0 meter 07.34.41 612.0334 S 10647.1160 E 0 meter Total jarak tempuh = 23,74 meter Total jarak tempuh dengan Google Earth= 5,86 Meter
Hasil koordinat posisi yang ditampilkan pada tabel di atas di ambil pada saat kondisi cuaca hujan dengan posisi kendaraan tidak bergerak. Berdasarkan tabel di atas, koordinat posisi selalu berubah beberapa kali sehingga menyebabkan kendaraan terkesan bergerak. Namun pada kenyataan di lapangan, kondisi kendaraan tetap di
titik yang sama. Seperti yang telah dijelaskan sebelumnya, pada kondisi cuaca hujan, terdapat perubahan magnetic field yang terjadi di awan, menyebabkan berkumpulnya ion positif dan ion negatif, sehingga terjadi pembelokan sinyal yang dipancarkan oleh satelit. Selain itu, dapat pula dipengaruhi oleh kondisi lapangan pada saat pengambilan data dilakukan, yaitu di sekitar gedung bertingkat.
Tabel 4.16. Kendaraan tidak bergerak dengan cuaca cerah Waktu (UTC time) Koordinat Posisi Jarak Tempuh Lintang Bujur 08.28.55 612.0359 S 10647.1174 E 0 meter 08.29.03 612.0367 S 10647.1172 E 19,62 meter 08.29.11 612.0395 S 10647.1168 E 0 meter 08.29.19 612.0393 S 10647.1166 E 1,54 meter 08.29.26 612.0391 S 10647.1164 E 0,36 meter 08.29.34 612.0386 S 10647.1162 E 1,20 meter 08.29.41 612.0384 S 10647.1150 E 32 meter 08.29.50 612.0379 S 10647.1148 E 1,16 meter 08.29.58 612.0375 S 10647.1148 E 0,74 meter 08.30.06 612.0375 S 10647.1151 E 0 meter 08.30.14 612.0373 S 10647.1152 E 0,36 meter 08.30.21 612.0373 S 10647.1152 E 0 meter 08.30.29 612.0371 S 10647.1152 E 0,36 meter Total jarak tempuh = 25,8 meter Total jarak tempuh dengan Google Earth= 13,16 meter
Error Rate jarak total= ∞ meter
Meskipun dengan kondisi cuaca yang berbeda dengan tabel sebelumnya, koordinat posisi yang didapat tetap mengalami perubahan dengan kondisi kendaraan diam pada titik yang sama. Hal ini dapat disebabkan oleh beberapa faktor, bukan hanya berdasarkan faktor cuaca saja, seperti halnya lokasi pengambilan data, yakni di sekitar gedung bertingkat. Error rate yang didapat tak hingga, karena adanya jarak
tempuh, sehingga tidak dapat dibagi dengan jarak tempuh sebenarnya, yaitu nol meter.
4.3.3.6.Evaluasi keseluruhan
Kesalahan beberapa informasi data yang diterima, seperti yang telah dipaparkan diatas, terjadi karena adanya error budget yang dimiliki oleh setiap GPS receiver, dimana tingkat kesalahannya pun tidak dapat diduga. Akan tetapi, seperti yang dijelaskan sebelumnya, penelitian ini tidak menitikberatkan pada ketepatan informasi data yang diterima oleh receiver dan perhitungan total jarak tempuh oleh mikrokontroler, melainkan dititikberatkan pada keberhasilan penerimaan data yang diterima oleh receiver dari satelit dan penyimpanan data pada MMC, yang hasil dari informasi data tersebut dapat dijadikan informasi bantuan untuk pengembangan lebih lanjut, seperti pelacakan jalur (tracking) dengan menggunakan digital map, yang dapat dilihat pada gambar 4.12. Namun, evaluasi di atas dapat membuktikan bahwa sistem pada penelitian ini bekerja dengan baik dan mampu menyimpan informasi data koordinat yang dikirim oleh satelit dan mampu melakukan perhitungan jarak tempuh yang dilakukan oleh mikrokontroler.
Berdasarkan beberapa pengujian di lapangan dan beberapa teori tentang GPS, diperlukan beberapa penelitian lebih lanjut untuk mendapat perhitungan jarak antar posisi dengan prosentase 90-100 persen, seperti perhitungan konversi koordinat menjadi jarak, algoritma yang terdapat pada receiver, dan beberapa hal lainnya yang di anggap perlu.