PROPOSAL TUGAS AKHIR
PERANCANGAN MODIFIKASI SISTEM
PENGEBORAN PCB OTOMATIS BERBASIS
ARDUINO
Diajukan Oleh :
Fajar Julianto
NIM. 021100297
PROGRAM STUDI ELEKTRONIKA INSTRUMENTASI
JURUSAN TEKNOFISIKA NUKLIR
SEKOLAH TINGGI TEKNOLOGI NUKLIR
BADAN TENAGA NUKLIR NASIONAL
2
HALAMAN PERSETUJUAN PROPOSAL TUGAS AKHIR
PERANCANGAN MODIFIKASI SISTEM PENGEBORAN PCB OTOMATIS BERBASIS ARDUINO
Yang diajukan oleh: Nama : Fajar Julianto NIM : 021100297
Program Studi : Elektronika-Instrumentasi Jurusan : Teknofisika Nuklir
Telah disetujui oleh:
Pembimbing I Pembimbing II
Joko Sunardi, S.ST Nugroho Tri Sanyoto, S.ST
NIP. 19610710198202.1001 NIP.195810151977121001
Mengetahui,
Ketua Jurusan Teknofisika Nuklir
Ir. Zaenal Abidin, M.Kes NIP. 19620703 198703 1 005
3 DAFTAR ISI HALAMAN PERSETUJUAN 2 BAB I PENDAHULUAN 1.1 Latar Belakang 4 1.2 Rumusan Masalah 6 1.3 Batasan Masalah 6 1.4 Keaslian Penelitian 7
1.5 Tujuan Rancang Bangun 8
1.6 Manfaat Penelitian 9 1.7 Tinjauan Pustaka 9 1.8 Landasan Teori 11 1.8.1 Arduino Mega 11 1.8.2 Arduino IDE 17 1.8.3 Pengolahan Citra 18 1.8.4 Software Dhelpi 19 1.8.5 Driver motor Stepper 20
1.9 Hipotesis 22
BAB II RENCANA TUGAS AKHIR
2.1 Tempat dan Waktu 23
4
2.3 Rencana Kerja 24
2.4 Jadwal Pelaksanaan 26
DAFTAR PUSTAKA 27
DAFTAR GAMBAR
Gambar 1.1 Arduino Mega 2560 14
Gambar 1.2 Software Arduino IDE 15
Gambar 1.3 IC l293D 19
Gambar 1.4 Blok diagram IC L293D 19
Gambar 2.1 Blok diagram sistem pengeboran PCB otomatis 22
Gambar 2.2 Blok diagram sistem pengeboran PCB berbasis Arduino 23
Gambar 2.3 Bagan hubungan sistem 23
Gambar 2.4 Bagan Hubungan Sistem yang telah di modifikasi 24
DAFTAR TABEL
Tabel 2.1 Software yang digunakan 20
Tabel 2.2 bahan dan komponen 20
Tabel 2.3 Komponen Pendukung 21
5
BAB I
PENDAHULUAN
1.1 Latar Belakang
Saat ini komputer tidak hanya digunakan sebagai pengolah data saja namun juga bisa digunakan untuk melakukan pengontrolan suatu peralatan. Setiap orang mengharapkan segala sesuatunya berhasil dengan mudah dan efisien, serta sedikit campur tangan manusia dalam pelaksanaan prosesnya untuk melaksanakan kegiatan pengontrolan peralatan yang sulit dikerjakan secara rutin setiap saat secara manual, perlu adanya suatu pengontrolan otomatis.
Dalam bidang industri khususnya dituntut adanya peningkatan hasil produksi. Hal ini dikarenakan salah satu indikator keberhasilan usaha dalam bidang industri adalah banyaknya jumlah barang yang diproduksi semakin banyak barang yang diproduksi semakin banyak keuntungan yang diperoleh perusahaan tersebut. Namun jumlah produksi yang banyak harus didukung pula dengan peralatan produksi yang memadai. Untuk membantu kelancaran proses produksi tersebut biasanya perusahaan menggunakan alat yang mampu bekerja secara otomatis.
Bidang industri elektronika, biasanya komponen elektronika tersebut dipasang pada papan rangkaian cetak atau lebih dikenal dengan nama Printed
Circuit Board (PCB). PCB merupakan salah satu komponen utama yang
6 terdiri atas jalur dan lubang. Jalur dalam PCB tersebut berfungsi sebagai tempat aliran arus listrik. Lebar jalur disesuaikan dengan besarnya arus yang mengalir pada komponen rangkaian tersebut. Sedangkan lubang berupa pad pada PCB berfungsi untuk menempatkan komponen elektronika yang akan digunakan dalam pembuatan rangkaian.
Pembuatan lubang letak komponen dilakukan secara manual dengan menggunakan bor sesuai dengan skema gambar yang tercetak pada PCB. Besar diameter dan jumlah lubang disesuaikan dengan jenis dan jumlah komponen yang akan dipasangkan dalam rangkaian tersebut. Pengeboran PCB secara manual dibutuhkan ketelitian untuk menghindari kesalahan dalam pengeboran, sehingga kelemahan dari pengeboran secara manual semakin semakin banyak lubang yang akan di bor kemungkinan kesalahan pengeboran semakin besar.
Maka dari itu untuk menghindari kesalahan dimana ada pad atau via yang tidak dibor, maka dalam proyek ini dirancang sebuah mesin bor otomatis untuk melakukan pengeboran PCB. Di samping itu, mesin bor otomatis ini diharapkan memiliki keuntungan dalam melakukan pengeboran PCB yang sama dengan jumlah yang banyak, tingkat kesalahan (error) dalam proses pengeboran dapat dikurangi, hemat waktu karena proses pengeboran secara otomatis relatif lebih cepat dibandingkan dengan cara manual, serta hemat penggunaan tenaga manusia karena proses pengeboran dilakukan dengan menggunakan tenaga mesin. Di STTN dalam penelitian sebelumnya telah dirancang suatu alat “ Pengendali
Motor Untuk Pengeboran Papan PPC Secara Otomatis” oleh Ghati Kharisma
7 beberapa komponen dan software untuk pengendalian alat tersebut. Berdasarkan kenyataan tersebut maka akan dirancang suatu modifikasi alat untuk memperbaiki kerusakan alat dan memperbaiki beberapa kelemahan alat pengeboran PCB otomatis yang telah dibuat oleh Ghati Karisma pada tahun 2011 yang dituangkan dalam tugas akhir dengan judul “PERANCANGAN MODIFIKASI SISTEM
PENGEBORAN PCB OTOMATIS BERBASIS ARDUINO”.
1.2 Rumusan Masalah
Dari uraian latar belakang tersebut diatas maka dapat dirumuskan permasalahan sebagai berikut:
1) Memodifikasi perangkat keras atau hardware motor Stepper dan driver sehingga dapat dihubungkan dengan arduino.
2) Merancang perangkat lunak/ program Arduino untuk mengedalikan posisi x,y,z motor stepper, menggunakan Arduino IDE.
3) Memodifikasi perangkat lunak/program yang mampu meng-scan gambar dan mengolahnya pada komputer dan dapat dikomunikasikan dengan Arduino sebagai pengendali driver motor stepper.
4) Melakukan pengujian alat.
1.3 Batasan Masalah
Mengingat keterbatasan kemampuan serta untuk menghindari adanya
pembahasan di luar materi dalam mengerjakan penelitian ini meliputi perangkat keras dan perangkat lunak. Dari uraian latar belakang tersebut diatas maka dapat dirumuskan permasalahan sebagai berikut:
8 1) Modifikasi Perangkat lunak/program dibuat dengan software delphi 7.
Program yang dibuat meliputi:
a) Program sebagai perancang letak lubang PCB.
b) Program peng-scan gambar PCB (bertipe file *Bmp), disain otomatis, luasan area sama, sensitivitas warna yang terdeteksi sebagai lubang adalah warna hitam.
c) Program pengolah data, baca data, dan kirim data. d) Dapat dikomunikasikan dengan perangkat Arduino.
2) Antarmuka perangkat lunak/program dengan rangkaian driver motor
stepper menggunakan Arduino dengan komunikasi serial USB.
3) Pemrograman IC mikrokontrol Arduino dengan bahasa C menggunakan Arduino IDE.
1.4 Keaslian Penelitian
Perancangan bor dengan kendali mesin sudah banyak dilakukan dan bahkan sudah banyak diinstal pada pabrik-pabrik elektronika. Seperti salah satunya Danang Widyawarman didalam tugas akhirnya “Rancang Bangun Otomasi Sistem Pengeboran PCB Berbasis Personal Computer” pada tahun 2008 membuat alat ini dalam bentuk simulasi.
Selain itu juga telah dirancang oleh Thiang Handy Wicaksono di dalam makalahnya “ Kontrol Mesin bor PCB otomatis dengan Menggunakan
Programmable Logic Controller” pada tahun 2010. Pada penelitian ini dirancang
9 Kemudian pernah dilakukan penelitian di STTN-BATAN oleh Ghati kharisma pada tahun 2011 dalam tugas akhir yang berjudul “Rancang Bangun Perangkat Lunak sebagai Pengendali Motor pada Pengebor PPC Otomatis” pada penelitian ini dirancang suatu software menggunakan Dhelpi 7.0 untuk mengolah data gambar dan dikomunikasikan ke mikrokontroler untuk mengendalikan motor
Stepper [1].
Pada tugas akhir yang akan di rancang oleh penulis adalah memodifikasi alat pengeboran PCB otomatis yang telah dirancang oleh Ghati karisma, dalam perancangan modifikasi ini, penulis akan menggunakan mikrokontroler kit Arduino Mega 2560 dan di program menggunakan Arduino IDE dengan bahasa C, kemudian dikomunikasikan secara serial menggunakan USB dan terhubung dengan software Dhelpi. Modifikasi ini dilakukan untuk mengganti kerusakan pada hardware terutama pada mikrokontroler yang telah digunakan. Maka dari itu penggunaan Arduino cukup tepat karena lebih mudah dan lebih praktis dari sisi penggunaan, selain itu dalam segi pemrograman menggunakan bahasa C sehingga dapat mempermudah penulis dalam pembuatan program. Dari modul Arduino itu sendiri telah terdapat konektor USB untuk komunikasi (download atau upload) program sehingga tidak perlu tambahan modul untuk komunikasi.
1.5 Tujuan Rancang Bangun
Tujuan rancang bangun ini adalah sebagai berikut:
1) Modifikasi sebuah sistem kontrol baik perangkat lunak maupun rangkaian elektronika pengebor PCB otomatis
10 2) Modifikasi sebuah perangkat lunak yang mampu mengidentifikasi gambar PCB untuk kemudian dipindahkan ke- PCB asli melalui pengebor PCB otomatis.
1.6 Manfaat Rancang Bangun
Penelitian ini diharapkan dapat bermanfaat dan berguna bagi pengembangan ilmu dan teknologi Indonesia khususnya kalangan mahasiswa, lembaga terkait dan industri-industri yang bergerak dibidang perangkat lunak dan elektronika. Sebagai salah satu alat penunjang dalam perakitan komponen elektronika yaitu kemudahan dalam pembuatan lubang PCB. Tidak lagi harus mengandalkan tenaga manual manusia tetapi menggunakan perangkat komputer sebagai antarmuka. Tingkat ketelitian yang lebih tinggi dapat mengurangi resiko kesalahan cetak PCB, waktu produksi yang lebih efisien memungkinkan peningkatan hasil produksi yang tinggi.
1.7 Tinjauan Pustaka
Otomasi sangat dibutuhkan khususnya untuk menigkatkan produksi dari suatu perusahaan. Hal ini dikarenakan salah satu indikator keberhasilan usaha dalam bidang industri adalah banyaknya jumlah barang yang diSoproduksi semakin banyak barang yang diproduksi semakin banyak keuntungan yang diperoleh perusahaan tersebut.( Doddy Erlando.2008). untuk memenuhi suatu kebutuhan dalam industri elektronika khususnya dalam pembuatan papan PCB,
11 maka dari itu dalam tugas akhir ini akan di rancang suatu alat otomasi untuk pengeboran PCB secara otomastis.
Penelitian ini mengacu pada penelitian terdahulu yang berjudul “Rancang Bangun Otomasi Sistem Pengeboran PCB Berbasis Personal Computer” oleh Danang Widyawarman (2008) membuat alat ini dalam bentuk simulasi. Selain itu juga telah dirancang “ Kontrol Mesin bor PCB otomatis dengan Menggunakan
Programmable Logic Controller” oleh Thiang HBndy Wicaksono,dkk (2010) di
dalam makalahnya. Pada penelitian ini dirancang suatu mesin bor otomatis dengan kontrol menggunakan PLC.
Dan yang menjadi acuan pustaka utama dalam penelitian tugas akhir ini adalah penelitian yang pernah dilakukan di STTN-BATAN oleh Ghati kharisma pada tahun 2011 dalam tugas akhir yang berjudul “Rancang Bangun Perangkat Lunak sebagai Pengendali Motor pada Pengebor PPC Otomatis” adalah pemrogramanan pada software yang dibuat lebih kompleks untuk memberikan kemudahan dalam penggunaan alat, salah satunya adalah input dapat berupa sampel gambar PPC yang sudah jadi, berbentuk file dengan format *.bmp, driver motor dirancang dengan IC mikrokontrol AT89S52, serta dapat di uji secara langsung menggunakan PPC. [1].
Perbedaan dengan penelitian yang akan penulis lakukan adalah menitik beratkan dari segi Hardware untuk modifikasi alat pengeboran. Dalam penelitian yang telah dilakukan Ghati karisma menggunakan mikrokontroler AT89S52 yang saat ini sudah jarang digunakan. Sedangkan di dalam penelitian yang akan penulis kerjakan untuk pengontrolan motor stepper menggunakan Arduino ADK yang
12 saat ini sedang banyak di kembangkan untuk berbagai aplikasi. Selain itu arduino memliki beberapa kelebihan di banding dengan mikrokontroler yaitu Tidak perlu perangkat chip programmer karena di dalamnya sudah ada bootloader yang akan menangani upload program dari komputer. Sudah memiliki sarana komunikasi USB, sehingga pengguna Laptop yang tidak memiliki port serial/RS323 bisa menggunakan nya. Bahasa pemrograman relatif mudah karena software Arduino dilengkapi dengan kumpulan library yang cukup lengkap. Memiliki modul siap pakai (shield) yang bisa ditancapkan pada board Arduino. Misalnya shield GPS, Ethernet, SD Card, dll.
Kemudian disisi software Dhelpi yang telah dibuat oleh Ghati karisma akan dilakukan modifikasi, sehingga software yang telah dibuat dapat dikomunikasikan ke Arduino ADK. Untuk program pengendalian moto stepper tidak menggunakan bahasa Assembly karena sudah jarang digunakan, tetapi dalam penelitian yang akan dilaksanakan menggunakan bahasa C yang telah tersedia khusus untuk processing program arduino menggunakan Arduino IDE. Pembahasan lebih lengkap mengenai rencana modifikasi dibahas pada rencana tugas akhir.
1.8 Landasan Teori
1.8.1 Arduino Mega
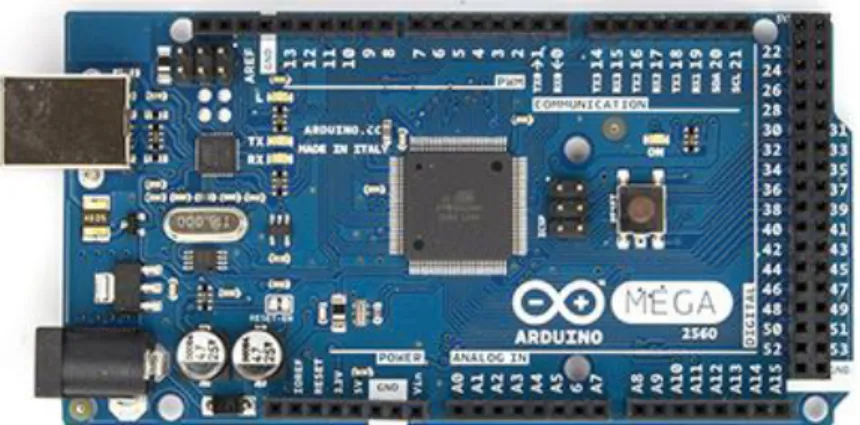
Arduino Mega2560 adalah papan mikrokontroler berbasiskan ATmega2560 Arduino Mega2560 memiliki 54 pin digital input/output, dimana 15 pin dapat digunakan sebagai output PWM, 16 pin sebagai input analog, dan 4 pin sebagai UART (port serial hardware), 16 MHz kristal
13
osilator, koneksi USB, jack power, header ICSP, dan tombol reset. Ini semua yang diperlukan untuk mendukung mikrokontroler. Cukup dengan menghubungkannya ke komputer melalui kabel USB atau power dihubungkan dengan adaptor AC-DC atau baterai untuk mulai mengaktifkannya. Arduino Mega2560 kompatibel dengan sebagian besar shield yang dirancang untuk Arduino Duemilanove atau Arduino Diecimila. Arduino Mega2560 adalah versi terbaru yang menggantikan versi Arduino Mega.
Gambar 1.1 Arduino Mega 2560
Arduino ATmega2560 memiliki 256 KB flash memory untuk menyimpan kode (yang 8 KB digunakan untuk bootloader), 8 KB SRAM dan 4 KB EEPROM (yang dapat dibaca dan ditulis dengan perpustakaan EEPROM).
Papan Arduino ATmega2560 dapat beroperasi dengan pasokan daya eksternal 6 Volt sampai 20 volt. Jika diberi tegangan kurang dari 7 Volt, maka, pin 5 Volt mungkin akan menghasilkan tegangan kurang dari 5 Volt dan ini akan membuat papan menjadi tidak stabil. Jika sumber
14
tegangan menggunakan lebih dari 12 Volt, regulator tegangan akan mengalami panas berlebihan dan bisa merusak papan. Rentang sumber tegangan yang dianjurkan adalah 7 Volt sampai 12 Volt.
1.8.2. Arduino IDE
software Arduino yang akan digunakan adalah driver dan IDE, walaupun masih ada beberapa software lain yang sangat berguna selama pengembangan Arduino. IDE Arduino adalah software yang sangat canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari:
Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Processing.
Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah microcontroller tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh microcontroller adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
Uploader, sebuah modul yang memuat kode biner dari Jomputer ke dalam memory di dalam papan Arduino.
15
Gambar 1.2 Software Arduino IDE
1.8.3 Pengolahan citra
Pengolahan citra merupakan proses pengolahan dan analisis citra yang banyak melibatkan persepsi visual. Proses ini mempunyai ciri data masukan dan informasi keluaran yang berbentuk citra. Istilah pengolahan citra digital secara umum didefinisikan sebagai pemrosesan citra dua dimensi dengan komputer. Dalam definisi yang lebih luas, pengolahan citra digital juga mencakup semua data dua dimensi. Citra digital adalah barisan bilangan nyata maupun kompleks yang diwakili oleh bit-bit tertentu. Umumnya citra digital berbentuk persegi panjang atau bujur sangkar (pada beberapa sistem pencitraan ada pula yang berbentuk segienam) yang memiliki lebar dan tinggi tertentu. Ukuran ini biasanya dinyatakan dalam banyaknya titik atau piksel sehingga ukuran citra selalu bernilai bulat. Setiap titik memiliki koordinat sesuai posisinya dalam citra. Koordinat ini biasanya dinyatakan dalam bilangan bulat positif, yang dapat
16 dimulai dari 0 atau 1 tergantung pada sistem yang digunakan. Setiap titik juga memiliki nilai berupa angka digital yang merepresentasikan informasi yang diwakili oleh titik tersebut.
Format data citra digital berhubungan erat dengan warna. Pada kebanyakan kasus, terutama untuk keperluan penampilan secara visual, nilai data digital merepresentasikan warna dari citra yang diolah. Format citra digital yang banyak dipakai adalah Citra Biner (monokrom), Citra Skala Keabuan (gray scale), Citra Warna (true color), dan Citra Warna Berindeks.
1.8.4 Software delphi 7
Delphi adalah compiler/penterjemah bahasa Delphi (awalnya dari Pascal) yang merupakan bahasa tingkat tinggi sekelas dengan Basic dan C. Bahasa Pemrograman di Delphi disebut bahasa procedural artinya bahasa/sintaknya mengikuti urutan tertentu/prosedur. Ada jenis pemrograman non-prosedural seperti pemrograman untuk kecerdasan buatan seperti bahasa Prolog. Delphi termasuk keluarga Visual sekelas Visual Basic, Visual C, artinya perintah-perintah untuk membuat objek dapat dilakukan secara visual. Pemrogram tinggal memilih objek apa yang ingin dimasukan kedalam Form/Window, lalu tingkah laku objek tersebut saat menerima event/aksi hanya tinggal dibuat programnya. Delphi merupakan bahasa berorentasi objek, artinya nama objek, property dan methode/ prosedur dikemas menjadi satu kemasan (encapsulate).
17 Keunggulan Delphi adalah:
1) IDE (Intregated Development Environment) atau lingkungan perkembangan aplikasi sendiri adalah satu dari keunggulan Delphi, didalamnya terdapat menu-menu yang memudahkan untuk membuat suatu proyek program
2) Proses kompilasi cepat, pada saat aplikasi yang dibuat dijalankan pada Delphi, maka secara otomatis akan dibaca sebagai sebuah program
3) Mudah digunakan, source kode Delphi yang merupakan turunan dari Pascal, sehingga tidak diperlukan suatu penyesuaian lagi
4) Bersifat multi purphase, artinya bahasa pemrograman Delphi dapat digunakan untuk mengembangkan berbagai keperluan pengembagan aplikasi.
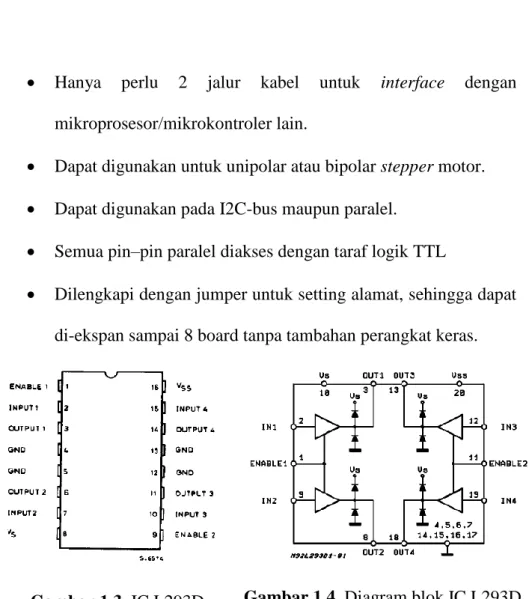
1.8.5 Driver motor stepper[ART10]
Rangkaian driver motor stepper dirancang untuk mengaktifkan dan mengontrol gerak motor stepper, yaitu untuk mengatur pulsa-pulsa listrik dengan nilai tertentu sehingga dapat menggerakkan motor stepper. SPC (Smart Peripheral Controller) motor stepper merupakan pengontrol motor
stepper yang menggunakan I2C-bus sebagai jalur penyampaian data
sehingga dapat lebih menghemat dan mempermudah pengkabelan, selain itu SPC motor stepper dapat digunakan secara paralel. Spesifikasi eksternal SPC motor stepper sebagai berikut:
18
Hanya perlu 2 jalur kabel untuk interface dengan mikroprosesor/mikrokontroler lain.
Dapat digunakan untuk unipolar atau bipolar stepper motor.
Dapat digunakan pada I2C-bus maupun paralel.
Semua pin–pin paralel diakses dengan taraf logik TTL
Dilengkapi dengan jumper untuk setting alamat, sehingga dapat di-ekspan sampai 8 board tanpa tambahan perangkat keras.
Gambar 1.3. IC L293D Gambar 1.4. Diagram blok IC L293D
1.9 Hipotesis
dapat dibangun suatu modifikasi sistem kontrol yang mana komputer digunakan sebagai alat kendali dan mikrokontroler Arduino sebagai antarmuka ke alat yang akan dikendalikan, berupa motor stepper yang dapat beban dapat digerakan sebanyak 3 aksis sesuai dengan arah sumbu masing-masing motor. Hal ini memungkinkan, jika beban yang dipasangkan berupa sebuah bor listrik, maka bor akan berjalan secara otomatis sesuai perintah yang dikirim dari komputer.
19
BAB II
RENCANA TUGAS AKHIR 2.1. Tempat dan Waktu
Penulisan tugas Akhir ini akan dilaksanakan di Laboratorium Kendali STTN-BATAN dalam waktu 5 (lima) bulan dimulai pada awal Februari sampai dengan Juni 2015.
2.2. Alat dan Bahan yang Digunakan
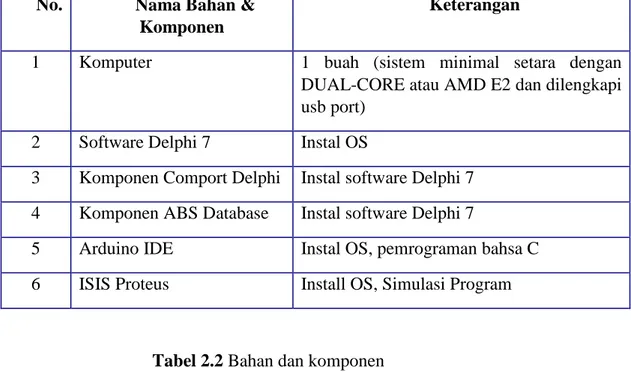
Tabel 2.1 Software yang digunakan No. Nama Bahan &
Komponen
Keterangan
1 Komputer 1 buah (sistem minimal setara dengan DUAL-CORE atau AMD E2 dan dilengkapi usb port)
2 Software Delphi 7 Instal OS
3 Komponen Comport Delphi Instal software Delphi 7 4 Komponen ABS Database Instal software Delphi 7
5 Arduino IDE Instal OS, pemrograman bahsa C 6 ISIS Proteus Install OS, Simulasi Program
Tabel 2.2 Bahan dan komponen
No. Nama Bahan & Komponen Keterangan
1 Motor Stepper 3 buah 2 Arduino ADK 1 buah 3 SPC motor stepper 3 buah
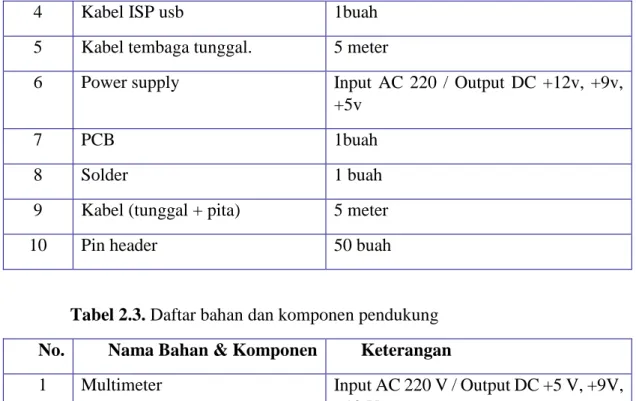
20 4 Kabel ISP usb 1buah
5 Kabel tembaga tunggal. 5 meter
6 Power supply Input AC 220 / Output DC +12v, +9v, +5v
7 PCB 1buah
8 Solder 1 buah 9 Kabel (tunggal + pita) 5 meter 10 Pin header 50 buah
Tabel 2.3. Daftar bahan dan komponen pendukung No. Nama Bahan & Komponen Keterangan
1 Multimeter Input AC 220 V / Output DC +5 V, +9V, +12 V
2 Project board 2 buah
2.3. Rencana Kerja 2.3.1 Studi Literatur
Penulis akan menggunakan beberapa sumber tertulis berupa buku-buku pustaka, buku-buku manual dan tulisan ilmiah dalam jurnal ilmiah. Selain itu menggunakan media lain seperti pencarian bahan tulisan melalui situs internet sebagai bahan dasar pengimplementasian sistem ini.
2.3.2 Studi Lapangan
Penulis akan menggunakan informasi yang ada dilapangan sebagai bahan tambahan dalam mengimplementasikan sistem ini.
21
2.3.3 Perancangan Sistem
a) Perancangan Hardware
Untuk perancangan desain hardware. Penulis tidak akan memodifikasi desain, kemungkinan perubahan hanya mengganti bor dengan spsifikasi yang lebih baik, sehingga tidak mudah rusak. Kemudian mengganti saklar pada bor, dengan saklar otomatis, sehingga untuk menghidupkan dan mematikan bor dapat dikendalikan dari komputer.
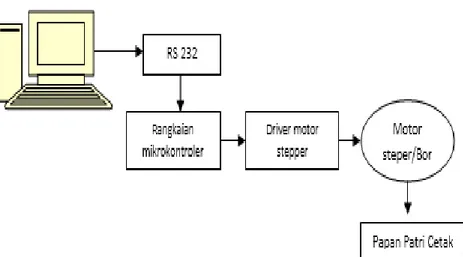
Pelaksanaan pembuatan alat pengebor otomatis seperti pada yang telah di rancang oleh Gati Kharisma pada Gambar 2.2. Menunjukkan hubungan masing masing bagian dan fungsinya
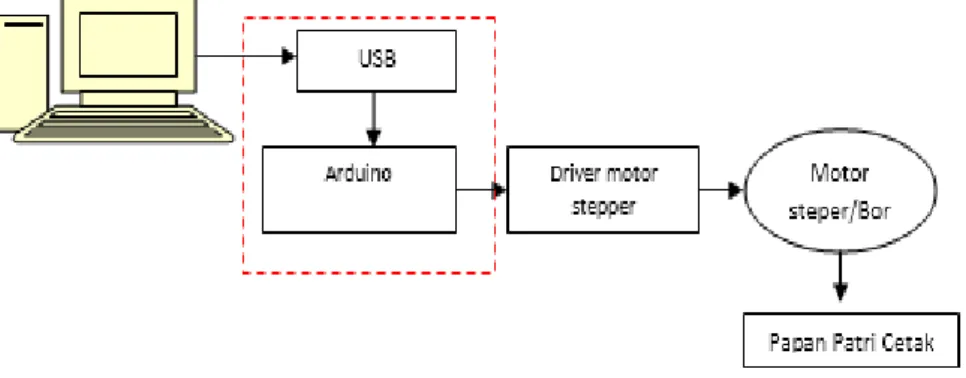
22 Maka dalam perancangan modifikasi yang akan dilakukan penulis dari diagram blok diatas. Rangkaian blok diagram mikrokontroler, di ganti menggunakan Arduino. Dapat dilihat pada gambar 2.3 di bawah ini.
Gambar 2.2 Blok diagram sistem pengebor PCB otomatis
berbasis Arduino
Perancangan sistem yang merupakan hubungan antara komputer, mikrokontroler AT89S52 dengan driver motor stepper yang telah dibuat oleh Gati Kharisma dapat dilihat pada Gambar 2.2
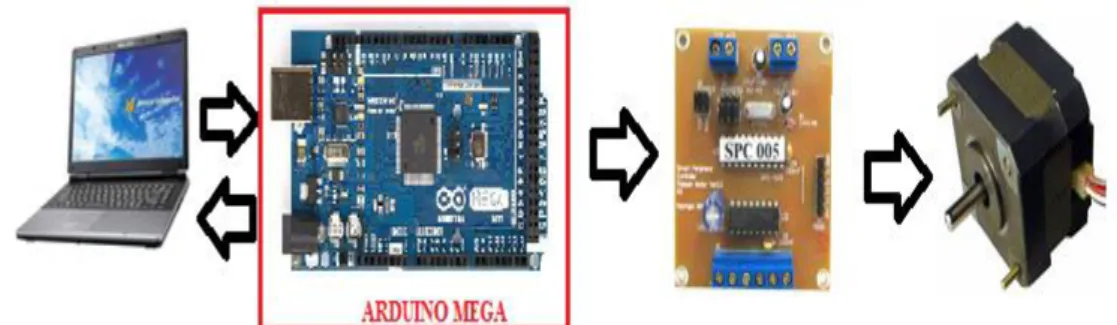
23 Dari hubungan sistem diatas maka penulis akan memodifikasi pada bagian mikrokontroler yaitu mengganti AT89S52 dengan kit Arduino Mega ADK.hubungan system dapat diliha pada gambar 2.3.
Gambar 2.4 Bagan hubungan sistem yang telah dimodifikasi
Alasan mengapa Arduino yang di pilih karena arduino memiliki beberapa kelebihan seperti yang telah dijelaskan pada dasar teori. Dengan beberapa kelebihan tersebut maka memudahkan penulis untuk perancangan memodifikasi alat ini.
b) Perancangan perangkat lunak
Perancangan Perangkat lunak tidak bisa lepas dari perancangan
driver, sebab komunikasi yang terjalin antara perangkat lunak dengan driver haruslah sesuai (sinkron) agar dapat membentuk suatu sistem.
Maka, tipe data masing-masing I/O-nya pun harus ditentukan.
Alur program didalam perangkat lunak dibagi menjadi tiga bagian. Yang pertama ialah program scanner, program inilah yang nantinya digunakan sebagai identifikasi warna pada file gambar (*.Bmp) dari sebuah sampel PCB. Yang ke-dua program drawing, merupakan program untuk meng-input letak sebuah atau lebih titik lubang pada PCB nantinya, dan yang ke-tiga adalah program proses. Dimana setelah semua
24 input dari manusia pengguna (user) telah selesai, barulah program ini mengirim sederet atau lebih perintah ke-Arduino untuk diterjemahkan sebagai alamat, arah, dan banyak putaran pada motor stepper.
c) Pengujian Sistem dan Penerapan
Pengujian akan dilakukan secara keseluruhan, artinya dengan hubungan lengkap antara software, Arduino, SPC motor driver dan motor
stepper. Selanjutnya software diberikan input dan melihat apakah
keseluruhan sistem sudah bekerja dengan baik atau belum dengan memperhatikan kesesuaian putaran dan arah gerak motor. Aplikasi
software juga perlu diperhatikan untuk kesesuaian dengan sistem operasi.
Pengujian dilakuan berulang-kali dengan input yang berbeda.
Error (kesalahan) dapat terjadi pada banyak bagian, termasuk
didalamnya:
1) Kesalahan pemrograman didalam software. 2) Kesalahan pemrograman didalam Arduino. 3) Kesalahan pengkabelan/hubungan.
Tidak ada tahap mudah mengidentifikasi bagian error mana yang memiliki kesalahan. Satu-satunya cara ialah memeriksa semua bagian dengan urutan poin 3, 2, 1 diatas.
Pengujian dilanjutkan setelah tidak ada error ditemukan, dengan memperhatikan kecepatan putaran motor. Kecepatan putaran motor
25 disinkronisasi antara kemampuan motor dengan kecepatan clock pada program Arduino.
2.3.4 Pembuatan Laporan
Laporan tugas akhir akan dibuat berdasarkan sumber literatur yang digunakan sebagai acuan dasar dan berdasarkan langkah-langkah percobaan dilapangan.
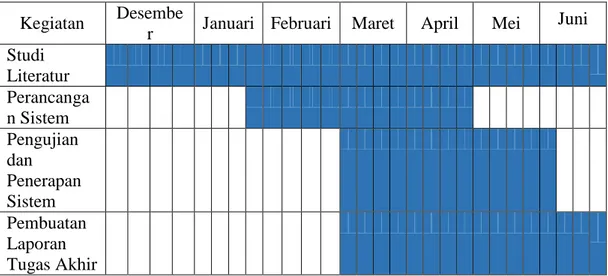
2.4. Jadwal Pelaksanaan
Tabel 2.4 Jadwal Rencana Pelaksanaan Kegiatan Desembe
r Januari Februari Maret April Mei Juni Studi Literatur Perancanga n Sistem Pengujian dan Penerapan Sistem Pembuatan Laporan Tugas Akhir
26
DAFTAR PUSTAKA
1. www.Hendriono.com/blog/post/mengenal-arduino-mega2560 diakses
tanggal 17 desember 2014.
2. www.arduino.cc diakses tanggal 17 desember 2014
3. Karisma, Ghati. 2011. Rancang Bangun Perangkat Lunak Sebagai
Pengendali Motor Pada Pengebor Ppc Otomatis. Elektromekanik.
STTN-BATAN.
4. Erlando ,Doddy. 2008. Perancangan Sistem Pengeboran PCB otomatis
menggunakan Komputer. Program studi Teknik Listrik. Jurusan Teknik
Elektro. Politeknik Universitas Andalas.
5. Thiang, dkk. 2010. Kontrol Mesin Bor PCB Otomatis dengan Menggunakan Programmable Logic Controller. Jurusan Teknik Elektro,