TUGAS AKHIR – TM 090340
KAJIAN OPTIMASI UNJUK KERJA MOTOR DC SEPEDA MOTOR LISTRIK ROJO GENI DENGAN METODE
REWIRING DAN RECOILING PADA KONDISI STASIONER MASHUDA
2110 030 064 Dosen Pembimbing
Hendro Nurhadi, Dipl.-Ing., Ph.D 19751120 200212 1 002
PROGRAM STUDI D3 TEKNIK MESIN Fakultas Teknologi Industri
FINAL PROJECT– TM 090340
STUDY OPTIMATION PERFORMANCE DC MOTOR ROJO GENI ELECTRIC MOTOR CTCLE WITH THE METHOD OF REWIRING AND RECOILING AT THE STATIONERY CONDITION
MASHUDA 2110 030 064 Advisor Lecturer
Hendro Nurhadi, Dipl.-Ing., Ph.D 19751120 200212 1 002
STUDY PROGRAM DIPLOMA III
MECHANICAL ENGINERING DEPRTEMENT Faculty of Industrial Technology
viii DAFTAR ISI
Lembar Pengesahan………i
Abstrak………...ii
Abstract………..iii
Kata Pengantar……….……….vi
Daftar Isi………...vii Daftar Gambar………..xi
Daftar Tabel………. xiii
Daftar Grafik………xix
Daftar Simbol………...xiv
BAB I PENDAHULUAN……….. 1
1.6 Sistematika Penulisan……… 4
BAB II TINJAUAN PUSTAKA………. 7
2.3 Bruhless DC Motor………. 19
2.3.1 Pendahuluan ……….. 19
2.3.2 Konstruksi Motor DC……….... 19
ix
2.4 Baterai dan Akumulator... 30
2.4.1 Pengertian Baterai……… 30
2.4.2 Klasifikasi Baterai………... 34
BAB III METODOLOGI PENELITIAN………… 39
3.1 Diagram Alir Metode Penelitian………. 39
3.2 Desain dan Analisis System Kendali Pada Sepeda Motor Listrik Dengan Motor DC Pada Program Matlab 2009a……… 44
3.2.1 Perencanaan Desain Motor DC ……….. 44
3.2.2 Perhitungan Daya Input dan Output……….... 48
3.2.3 Identifikasi Torsi dan RPM pada Motor DC.. 51
BAB IV HASIL DAN PEMBAHASAN…………. 55
4.1 Penentuan Induktansi, Resistansi, dan Kapasitansi… 55 4.2 Perencanaan Desain Motor DC Dengan Software Matlab 2009a……… 57
4.2.1 Permanent Magnet Synchronous Machine….. 58
4.2.2 Converter dan DC Bus………….……….... 58
4.2.3 Controller……….. 58
4.2.4 Hasil Karakterisasi dan Pengisian Parameter Pada Program Matlab….….……… 62
4.3 Analisis ………...74
4.5 Cara Optimasi ...79
4.6 Penjelasan Teori Perubahan Torsi dan RPM...83
BAB V KESIMPULAN DAN SARAN……… 93
5.1 Kesimpulan………. 93
x LAMPIRAN
xix
DAFTAR TABEL
Tabel 3.1 Nilai Default Permanent Magnet Synchronous
System……….54
Tabel 3.2 Nilai Default DC bus and Converter………55
Tabel 3.3 Nilai Default Controller………...57
Tabel 4.1 Perubahan pada Permanent Magnet Synchronous
Machine………...…………75
Table 4.2Perubahan Pada Converter dan DC Bus………...75
xv
DAFTAR GAMBAR
Gambar 2.1 Baganklasifikasi Motor Listrik……….…...………10
Gambar 2.2 Motor DC Sederhana………...11
Gambar 2.3 Medan Magnet yang membawa.arus Mengelilingikonduktor……...……….…………....11
Gambar 2.4 Medan Magnet yang membawa arus Mengelilingi konduktor………12
Gambar 2.5 Medan magnet mengelilingi konduktor dan Diantara kutub………..13
Gambar 2.6 Reaksi garis fluks……….13
Gambar 2.7 Prinsip kerja motor DC………14
Gambar 2.8 EMF kembali………15
Gambar 2.9 Konstruksi Motor DC………...18
Gambar 2.10 Kontruksi silindris………..19
Gambar 2.11 Konstruksi Pancake………20
Gambar 2.12 Bagian Mesin Motor DC………21
Gambar 2.13 Konfigurasi listrik Stator………...22
Gambar 2.14 Tiga Kumparan Stator Tiga Fase Dan Rotor Motor DC Brushless……….23
Gambar 2.15 Sistem Penggerak Motor DC Brushless Gambar2.16 Sensor Hall Sinyal untuk Rotasi ...24
Gambar 2.17 Sensor Hall Effect Pengubah Tiga Fasa Brushless DC Motor………...24
xvi
Gambar2.19 Urutan pensaklaran rotasi motor Q1 sampai
Q6………..…………...…....27
Gambar 2.20 Susunan dasar suatu baterai………....27
Gambar 2.21 Konstruksi Baterai………..32
Gambar 2.22 Susunan baterai Primer………...34
Gambar 2.23 Konstruksi Akumulator………..36
Gambar3.1 Diagram Alirpenelitian secara umun…………...50
Gambar 3.2 Diagram AlirPengujian RPM………..……...51
Gambar 3.3 Diagram Alir Perhitungan Nilai Torsi Dan Optimasi Pada Program Matlab…...………....52
Gambar3.4 Diagram Alir Pengujian Exsperimen………...…..53
Gambar 3.5Tampilan Dalam Motor DC ……….….…………..59
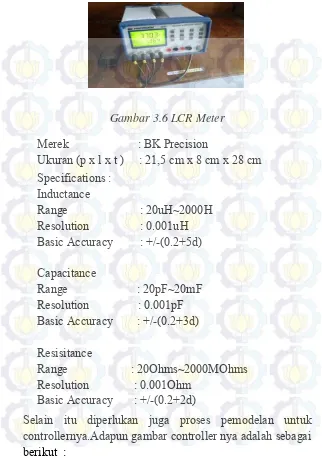
Gambar 3.6 LCR Meter……….…….………..60
Gambar 3.7Controller.………61
Gambar3.8Tachometer………....………62
Gambar3.9 Motor DC…….………...63
Gambar 3.10Roller………...64
Gambar 3.11 Tang Ampere………..65
Gambar4.1 LCR Meter tersambung dengan Motor DC…...…..67
Gambar 4.2 Pemodelan Motor DC….………..………69
Gambar 4.3 Parameter Brushless DC Motor Drive Pada Program matlab...62
Gambar 4.4 Parameter Block Brhusless motor drive...63
Gambar 4.5 Grafik Hasil Uji dengan Software matlab ...64
Gambar 4.6 Work Pice...65
xvii
ix
KATA PENGANTAR
Alhamdulillah puji syukur kehadirat Allah SWT yang telah melimpahkan rahmat dan karunianya, sehingga penulis dapat menyelesaikan naskah Tugas Akhir yang berjudul
“KAJIAN OPTIMASI UNJUK KERJA MOTOR DC SEPEDA MOTOR LISTRIK ROJO GENI DENGAN METODE REWIRING DAN RECOILING PADA KONDISI STASIONER”ini dengan baik.
Penulis mengucapkan rasa terima kasih yang sebesar-besarnya kepada :
1. Allah SWT, atas segala limpahan rahmat dan nikmat yang diberikan.
2. Kedua orang tua dan keluarga atas kasih
sayang,dukungan, dan doa yang tak pernah putus.
x
Penulis menyadari bahwa naskah Tugas Akhir ini tidak lepas dari kekurangan. Oleh karena itu kritik dan saran ang bersifat membangun dari para pembaca sangat diharapkan. Semoga Tugas Akhir ini memberikan manfaat bagi semua pihak.
Surabaya,12 Juli 2014
xxi
RPM Revolution per menit
xxii
KAJIAN OPTIMASI PERFORMANCE MOTOR DC SEPEDA MOTOR LISTRIK ROJO GENI DENGAN METODE REWIRING DAN RECOILING PADA KONDISI STASIONER
Nama Mahasiswa : Mashuda NRP : 2110 030 064
Jurusan : D3 Teknik Mesin FTI-ITS Dosen Pembimbing : Hendro Nurhadi,Dipl-Ing.Ph.D
ABSTRAK
Rewiring merupakan proses penggulungan ulang dan recoiler merupakan penambahan gulungan kawat yang dilakukan pada lilitan sebuah motor listrik. Proses ini dilakukan pada sebuah motor listrik DC untuk mengetahui performance dari motor DC agar memperoleh kinerja dari motor yang lebih optimal.
Metode yang digunakan dalam pengerjaan tugas akhir ini menggunakan metode control berupa simulink metode simulink digunakan dengan satu input data berupa torsi dan empat buah output berupa RPM(kecepatan),Arus dan torsi dari semua data hasil proses analisis tersebut dibandingkan dengan hasil uji tes pada saat proses eksperimen.
Setelah dilakukan proses rewiring dan recoiling pada motor DC didapatkan sebuah nilai torsi,RPM dan daya yang berbeda dari nilai sebelumnya. Nilai torsi cenderung lebih tinggi dari nilai data perhitungan sebelumnya yaitu sebesar 16,53 N dan nilai daya sebesar 969,6 Watt dan RPM sebesar 560 RPM.
v
STUDY OPTIMIZATION PERFORMANCE DC MOTOR ROJO
GENI ELECTRIC MOTOR CYCLE WITH REWINDING AND
RECOILLING METHODE ON STATIONERY CONDITION
Student Name : Mashuda NRP : 2110 030 064
Department : D3 TeknikMesin FTI-ITS Supervisor : HendroNurhadi, DIpl.-Ing.,Ph.D
ABSTRACT
Rewinding and recoilers process is the addition of a coil of wire that is done on a electric motor windings. This process in a DC electric motors to determine the performance of a DC motor in order to obtain the performance of the motor is more optimal.
The method used in the final project using a control Simulink method used with one input and a torque output of the four RPM (speed), Flow and torque of all the data analysis process results are compared with the test results when the test experiments.
After the process of rewiring and recoiling in a DC motor obtained a value of torque, RPM and power that is different from the previous value. Torque values tended to be higher than previous calculations of values data that is equal to 16.53 N and the rated power of 969.6 watts and RPM at 560 RPM.
Keywords : Rewiring, recoiler, DC motors, Comparison RPM,
79
DAFTAR PUSTAKA
1. Sumanto. 1994.MesinArusSearah. Yogyakarta: ANDI OFFSET.
2. Stouusrup. Jakob,State Space Methods;.Aalborg.
3. Rowell,Derek. 2002, Analysis and Design of Feedback Control Systems State-Space Representation of LTI Systems
4. Abdullah, 2010.Studi PengontrolTemperataur Motor DC UntukMemepertahankanKestabilanKecepatan Motor DC BerbasisiMikrokontroller AT89S52,Medan
5. Chapman,Stephen, Electric Machinery Fundamentals 6. Kingsley, Charles. 2003, Electric Machinery
7. Farid, Muhamed.2008, PID Controller Design for
Controlling DC Motor Speed Using
MatlabApplication,Pahang
8. Nadira,Elia. 2012, Development Of Position Tracking Of
BLDC Motor Using Adaptive Fuzzy Logic
Controller,Selangor.
9. Babuska, Robert, 1999. Matlab and Simulink for Modeling and Control
10. Cunkas, Mehmet, 2010. Realization of Fuzzy Controlled
Brushless DC Motor Drives Using
Matlab/Simulink,Konya
11. Ogata, Katsuhiko, 2010. Modern Control Engineering 12. Lelic,1996. Modern Control System Engoneering
13.Tri Sutrisno, Himawan.Borian, Pinto.:
KursiRodaElektris. 2012
14.William,Setiawan,2011.Desain Sistem Control
80
15.
http://www.orientalmotor.com/technology/articles/AC-brushless-brushed-motors.html. Diaksespadatanggal
13 maret 2013.
16.http://ww1.microchip.com/downloads/en/appnotes/008
57a.pdf .Journal of AN857 Microchip Corp. Diaksespadatanggal 13 maret 2013.
17.
http://circuitelec.blogspot.com/2009/07/brushless-dc-motors-theory-and-driver.html.
Diaksespadatanggal 13 maret 2013.
18.Dedy,Muhammad.2010 Perhitungan Pole Pada
TENTANG PENULIS
Mashuda,lahir di Nganjuk, 20 Juli 1991. Anak pertama dari empat
bersaudara.Menempuh pendidikan
formal di SD Negeri kebonagung 3
KabupatenNganjuk pada tahun
1999, di lanjutkan di SMP Negeri 5
Nganjuk pada tahun 2003,dan
1
BAB I PENDAHULUAN
1.1 Latar Belakang
Motor listrik adalah sebuah perangkat elektro magnetis yang mengubah energi listrik menjadi energi mekanik. Dengan perkembangan teknologi yang saatini semakin maju maka banyak sekali teknologi baru yang muncul di berbagai bidang seperti dibidang informasi, dunia usaha, alat transportasi dan sebagainya, maka motor listrik menjadi bagian yang tak terpisahkan dari kemajuan teknologi tersebut. Motorlistrik berkembang untuk diaplikasikan dalam berbagai bidangsalah satu yang saat ini di kembangkan adalah pada bidang transportasi atau bidang kendaraan otomotiv.
Saat ini banyak riset dan penelitian yang sedang mengembangkan sebuah alat berupa kendaraan hibrida yang ramah lingkungan hal itu dilakukan seiring dengan munculnya masalah tentang kelangkaan sumber bahan bakar minyak(BBM) yang semakin lama juga akan semakin menipis dan juga masalah tentang global worming.Dari haltersebut banyak upaya yang dilakukan untuk mengurangi dampak dari semua permasalahan tersebut salah satunya yaitu dengan menciptakan sebuah alat berupa sepeda motor listrik.
2
sebelumnya sehingga didapatkan hasil kinerja motor yang lebih maksimum. Parameter input yang digunakan untuk menentukan data perhitungan ini yaitu dengan menggunakan software matlab. Dari data-data yang di dapatkan dari proses perhitungan dengan matlab maka akan mendapatkan hasil berupa data yang lebih actual.
1.2 Rumusan Masalah
Dari uraian singkat dan latar belakang, maka dirumuskan permasalahan sebagai berikut :
1. Bagaimana system kendali pada sepeda
motor listrik dengan aktuator motor DC setelah dilakukan proses rewiring dan recoiling.
2. Bagaimana Perbandingan nilai antara proses eksperimen dengan proses perhitungan. 3. Bagaimana mendapatkan performance dari
motor DC agar mencapai kerja maksimum
1.3 Tujuan
Tujuan dari penelitian ini adalah :
1. Untuk memperoleh data-data pada sepeda motor listrik dengan actuator motor DC
2. Untuk memperoleh Perbandingan nilai
antara proses eksperimen dengan proses perhitungan.
3
1.4 Batasan Masalah
Untuk memberikan arah perancangan analisa diberikan batasan - batasan sebagai berikut:
1. Pada penelitian ini tidak membuat motor listrik, melainkan hanya membuat pemodelan dan analisa data – data.
2. kebutuhan sumber daya yang berasal dari accu 48 V.
3. Pada penelitian ini tidak membahas detail tentang accu.
4. Motor listrik yang digunakan berupa motor DC 48 Volt dan 800 Watt yang sudah dilakukan proses rewiring dan recoiling
5. Peletakan motor penggerak berada di belakang (dekat roda belakang)
6. Tidak menghitung nilai material dari body rangka motor listrik.
7. Tidak menghitung jumlah dan jenis material lilitan kawat yang terdapat pada motor DC
1.5 Manfaat
Manfaat yang diharapkan dari hasil penelitian ini adalah :
4
2. Mendapatkan hasil performance motor yang lebih maksimum.
1.6 Sistematika Penulisan
Sistematika penulisan yang digunkan dalam penelitian ini adalah :
BAB I PENDAHULUAN
Pada bagian ini diuraikan latar belakang, perumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian dan sistematika penulisan.
BAB II KAJIAN PUSTAKA DAN DASAR TEORI
Pada bagian ini diuraikan beberapa landasan teori dan hasil penelitian sebelumnya.
BAB III METODE PENELITIAN
Pada bagian ini akan diuraikan metode penelitian, spesifikasi peralatan yang akan dipakai dalam pengujian, cara pengujian, dan data yang diambil.
BAB IV HASIL DAN PEMBAHASAN
5 BAB V PENUTUP
Pada bagian ini berisi kesimpulan hasil penelitian serta saran-saran konstruktif untuk penelitian selanjutnya.
DAFTAR PUSTAKA
Pada bagian ini berisi sumber-sumber yang didapatkan dalam penulisan buku tugas akhir ini.
LAMPIRAN
6
7 BAB II
TINJAUAN PUSTAKA 2.1 Motor listrik
2.1.1 Pengertian Motor Listrik
8 2.1.2 Cara Kerja Motor Listrik
Mekanisme kerja untuk seluruh jenis motorsecara umum sama, antara lain sebagai berikut :
Arus listrik dalam medan magnet akan memberikan gaya
Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran Pasangan gaya menghasilkan tenaga putar/ torque untuk memutar kumparan. Motor-motor memiliki beberapa loop
pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan/loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban mengacu kepada keluaran tenaga putar/ torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan kedalam tiga kelompok (BEE India, 2004):
9
bervariasi dengan kecepatan operasinya namun torque nya tidak bervariasi. Contoh beban dengan torque konstan adalah conveyors danpompa displacement konstan.
2. Beban dengan variabel torque adalah beban dengan torque yang bervariasi dengan kecepatan operasi. Contoh beban dengan variabel torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kwadrat kecepatan).
3. Beban dengan energi konstan adalah beban dengan permintaan torque yang berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
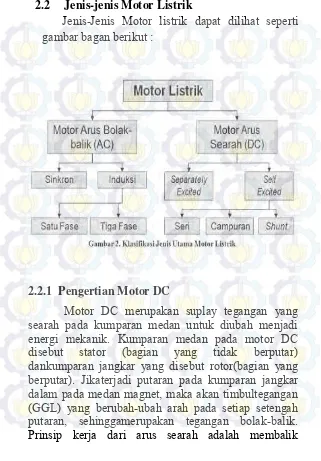
10 2.2 Jenis-jenis Motor Listrik
Jenis-Jenis Motor listrik dapat dilihat seperti gambar bagan berikut :
2.2.1 Pengertian Motor DC
11
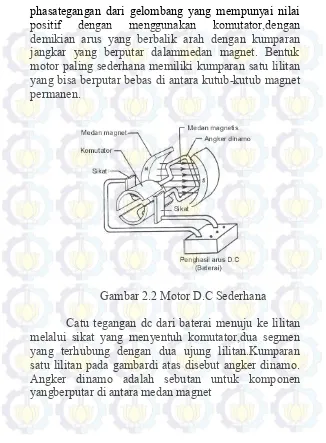
phasategangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator,dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalammedan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Gambar 2.2 Motor D.C Sederhana
12 2.2.2 Prinsip Dasar Cara Kerja
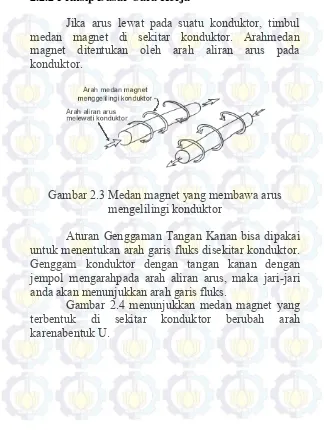
Jika arus lewat pada suatu konduktor, timbul medan magnet di sekitar konduktor. Arahmedan magnet ditentukan oleh arah aliran arus pada konduktor.
Gambar 2.3 Medan magnet yang membawa arus mengelilingi konduktor
Aturan Genggaman Tangan Kanan bisa dipakai untuk menentukan arah garis fluks disekitar konduktor. Genggam konduktor dengan tangan kanan dengan jempol mengarahpada arah aliran arus, maka jari-jari anda akan menunjukkan arah garis fluks.
13
Gambar 2.4 Medan magnet yang membawa arus mengelilingi konduktor.
Pada motor listrik konduktor berbentuk U disebut angker dinamo.
Gambar 2.5 Medan magnet mengelilingi konduktor dan diantara kutub.
14
Gambar 2.6 Reaksi garis fluks.
Lingkaran bertanda A dan B merupakan ujung konduktor yang dilengkungkan (loopedconductor).
Arus mengalir masuk melalui ujung A dan keluar melalui ujung B.Medan konduktor A yang searah jarum jam akan menambah medan pada kutub danmenimbulkan medan yang kuat di bawah konduktor. Konduktor akan berusaha bergerakke atas untuk keluar dari medan kuat ini. Medan konduktor B yang berlawanan arahjarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di ataskonduktor. Konduktor akan berusaha untuk bergerak turun agar keluar dari medan yangkuat tersebut. Gaya-gaya tersebut akan membuat angker dinamo berputar searah jarumjam.
Mekanisme kerja untuk seluruh jenis motor secara umum :
Arus listrik dalam medan magnet akan memberikan gaya.
15
Sisiloop, yaitu pada sudut kanan medan magnet,
akan mendapatkan gaya pada arah yang berlawanan.
Pasangan gaya menghasilkan tenaga putar /
torque untuk memutar kumparan.
Motor-motor memiliki beberapa loop pada
dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan.
Pada motor DC, daerah kumparan medan yang dialiri arus listrik akan menghasilkanmedan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konversi darienergi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung melaluimedan magnet, dengan demikian medan magnet disini selain berfungsi sebagai tempatuntuk menyimpan energi, sekaligus sebagai tempat berlangsungnya proses perubahanenergi, daerah tersebut dapat dilihat pada gambar di bawah ini :
16
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, makategangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksilawan. Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan makamenimbulkan perputaran pada motor.
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud denganbeban motor. Beban dalam hal ini mengacu kepada keluaran tenaga putar / torque sesuaidengan kecepatan yang diperlukan.
Beban umumnya dapat dikategorikan ke dalam tigakelompok :
Beban torque konstanadalah beban dimana permintaan keluaran energinyabervariasi dengan kecepatan operasinya namun torquenya tidak
bervariasi. Contohbeban dengan torque
konstan adalah corveyors, rotary kilns,
dan pompa displacementkonstan.
Beban dengan variabel torqueadalah
beban dengan torque yang bervariasi
dengankecepatan operasi. Contoh beban dengan variabel torque adalah pompa
sentrifugal dan fan(torque bervariasi
sebagai kuadrat kecepatan).
17
Beban dengan energi konstanadalah beban dengan permintaan torque
yangberubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan dayakonstan adalah peralatan-peralatan mesin.
2.2.3 Prinsip Arah Putaran Motor
Untuk menentukan arah putaran motor digunakan kaedah Flamming tangan kiri.Kutub-kutub magnet akan menghasilkan medan magnet dengan arah dari kutub utara kekutub selatan. Jika medan magnet memotong sebuah kawat penghantar yang dialiri arussearah dengan empat jari, maka akan timbul gerak searah ibu jari. Gaya ini disebut gayaLorentz, yang besarnya sama dengan F.
Prinsip motor : aliran arus di dalam penghantar yang berada di dalam pengaruhmedan magnet akan menghasilkan gerakan. Besarnya gaya pada penghantar akanbertambah besar jika arus yang melalui penghantar bertambah besar.
2.2.4 Electromotive Force (EMF) / Gaya Gerak Listrik
18
Teori dasarnya adalah jika sebuah konduktor listrik memotong garis medan magnet makatimbul ggl pada konduktor.
Gambar 2.8 E.M.F. Kembali.
EMF induksi terjadi pada motor listrik,generator serta rangkaian listrik dengan arahberlawanan terhadap gaya yang menimbulkannya.HF. Emil Lenz mencatat pada tahun 1834 bahwa “arus induksi selalu berlawanan arahdengan gerakan atau perubahan yang menyebabkannya”.Hal ini disebut sebagai HukumLenz.
Timbulnya EMF tergantung pada: • kekuatan garis fluks magnet • jumlah lilitan konduktor
•sudut perpotongan fluks magnet dengan konduktor
19 2.3 Bruhless DC Motor 2.3.1Pendahuluan
Motor DC yang menggunakan sikat seringkali menimbulkan masalah yaitu ausnya „sikat‟ dan timbulnya electrical noise. Oleh karena itu
dikembangkan motor DC tanpa sikat atau motor DC
brushless yang mempunyai kelebihan yaitu : efisiensi
tinggi, umur yang panjang, konsumsi energi yang kecil dan tidak menimbulkan electrical noise.
2.3.2Konstruksi Motor DC
Bentuk konstruksi motor DC brushless ada dua
buah yaitu silindris atau pancake seperti pada gambar
1 dan 2. Kebanyakan konstruksi motor DC brushless
adalah silindris, dan yang paling banyak dipakai adalah tipe inside rotor. Jenis ini digunakan pada
penggerak hard disk komputer. Jenis yang kedua
adalah rotor diletakkan pada sisi luar sekeliling stator, tipe ini disebut outside rotor.
Konstruksi silindris akan terlihat pendek dan tebal. Oleh karena itu arah medan magnetik radial terhadap sumbu putarnya.
20
Gambar 2.10 Konsruksi Silindris (a) Outside Rotor (b) Inside Rotor
Gambar 2.11 Konstruksi Pancake: (a) Stator Tunggal
(b) Stator Ganda
Motor jenispancake denganduabuah stator
21
2.3.3 Bagianbagian Brushless DC Motor
mulai dari bagian-bagian, jenis-jenis, prinsip dan cara kerja sampai ke berbagai perhitungan daya yang dapat dihasilkan.
Bagian-bagian Mesin DC
Gambar 2.12 Bagian mesin motor DC
Seperti terlihat pada gambar di atas, motor atau mesin DC memiliki enam bagian utama yang dapat
dirangkum menjadi dua bagian. Dimana dua bagian itu adalah :
1. Stator, sesuai namanya stator merupakan bagian dari motor DC yang diam (statis). Stator terdiri dari casing motor DC dan sepasang atau lebih magnet.
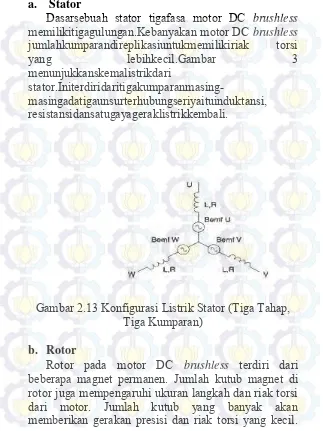
22 a. Stator
Dasarsebuah stator tigafasa motor DC brushless
memilikitigagulungan.Kebanyakan motor DC brushless
jumlahkumparandireplikasiuntukmemilikiriak torsi yang lebihkecil.Gambar 3 menunjukkanskemalistrikdari
stator.Initerdiridaritigakumparanmasing-masingadatigaunsurterhubungseriyaituinduktansi, resistansidansatugayageraklistrikkembali.
Gambar 2.13 Konfigurasi Listrik Stator (Tiga Tahap, Tiga Kumparan)
b. Rotor
Rotor pada motor DC brushless terdiri dari
23
Magnet permanen terdiri dari 1 sampai 5 pasang kutub. Dalam kasus tertentu bisa 8 pasang kutub.
Gambar 2.14 Tiga Kumparan Stator Tiga Fase Dan Rotor Motor DC Brushless
Rotor dari motor DC brushless
lebihringandaripada rotor dari motor DC konvensional yang universal di manakumparanditempatkanpada rotor.
Posisi rotor di deteksi dengan solid state light emitter sensor, piranti hall atau piranti lainnya. Sinyal feedback dari sensor dikembalikan ke unit kontrol akan
meng-ON-kan unit transistor, kemudian akan diteruskan ke kumparan medan stator secara sekuensial. Biasanya untuk mendeteksi posisi sudut menggunakan
hall-effect dan sensor optic. Hall effect untuk
24
Gambar 2.15 Sistem Penggerak Motor Dc Brushless
c.Hall Sensor
Untuk estimasi posisi rotor, motor ini dilengkapi dengan tiga sensor hall yang ditempatkan setiap 120 °L. Dengan sensor ini ada 6 komutasi yang mungkin berbeda. Pergantian fase power supply tergantungpada nilai-nilai sensor hall dengan perubahan kumparan.
25
Fungsi rangkaian control pada motor DC
brushless selain sebagai pengontrol perpindahan arus
juga sebagai pengarah rotasi rotor.Oleh karenaitu, kontrolle rmembutuhkan beberapa carau ntuk menentukan orientasi rotor.
Beberapa rancangan efek sensor hall menggunakan rotary encoder untuk mengukur posisi rotor.Selain itu terdapat lagi EMF dalam kumparan
undriven untukmenyimpulkan posisi rotor.
Kontroler ini berisi 3 bi-directional output untuk mendorong daya pada motor DC ketingkat yang lebihtinggi, dengan dikendalikan oleh rangkaian logika. Pengendali sederhana menggunakan pembanding untuk menentukan kapan fase output harus maju, sementara pengendali modern menggunakan mikrokontroler untuk mengelola akselerasi, control kecepatan dan menyempurnakan efisiensi.
Kontroler sensor yang lainnya mampu mengukur satu rasi berliku disebabkan oleh magnet dalam menyimpulkan posisi rotor.
Rangkaian control atau elektronik pada motor DC brushless dapat diatur untuk menghasilkan arus
berupa gelombang sinus atau persegi.Arus berbentuk gelombang persegi merupakan pilihan tebaik karena tidak menjadi sumber looses harmonik.
d. Phase Commutations
Fungsi komutasi dilakukan oleh beberapa sumbu as sensor: optical encoder, magnetic encoder
atau hall effect magnetic sensor. Dengan cara ini motor
26
akibat adanya medan magnetic yang tegak lurus terhadap arah arus. Penerapan medan magnet pada sensor ini akan mengakibatkan terjadinya perubahan tegangan sedikit pada output. Output hall akan menggerakkan comparator hingga peralatan dayanya
lebih stabil. Peralatan ini juga akan menggerakkan transistor kompon ketika diberi bias yang tepat. Hall effect sensor yang lebih modern berisi penguat yang
terintegrasi dan rangkaian digital. Sensor hall ini harus diletakkan sedekat mungkin dengan rotor magnet permanen untuk mendeteksi posisi rotor.
Gambar 2.17 Sensor Hall Effect Pengubah Tiga Fasa
Brushless DC Motor.
27
Gambar 2.18 Jembatan Tiga Fasa Dan Sensor Input Dengan Tabel Saklar Aktif
Gambar 2.19 Urutan pensaklaran rotasi motor Q1 sampai dengan Q6
28
kutub stator motor DC brushless menggunakan empat
siklus putaran listrik untuk memiliki satu putaran mekanik.
Kekuatan medan magnet menentukan kekuatan motor dan kecepatan motor. Dengan memvariasikan aliran arus melalui kumparan stator, kecepatan dan torsi motor dapat disesuaikan.
Cara yang umum untuk mengontrol aliran arus adalah dengan mengontrol aliran arus rata-rata melalui kumparan dengan PWM (Pulse Width Modulation)
yang mengatur tegangan rata-rata dan mendorong kecepatan. Sebagai contoh, frekuensi PWM yang dipilih adalah berkisar dari 10kHz sampai dengan 200kHz.
e.Losses pada Motor DC
Seperti yang kita ketahui, tidak ada yang memiliki efisiensi seratus persen begitu pula dengan mesin DC ini. Pada mesin DC terdapat pula beberapa inefisensi yang pada dasarnya dibagi menjadi dua yaitu Electrical Loses dan Mechanical Loses.
1. Electrical Losses
i2R Copper Losses, i2R Copper loss adalah rugi-rugi yang ditimbulkan oleh teremisikannya panas dari kawat tembaga yang membentuk kumparan pada mesin DC. Panas yang timbul pada tembaga merupakan akibat dari adanya arus terinduksi yang mengalir
rugi-29
rugi yang ditimbulkan akibat panas ini sebesar i2R.
Eddy -Current Losses, Eddy-Current adalah arus induksi yang muncul pada suatu konduktor akibat adanya perubahan medan magnetik yang dirasakan oleh konduktor tersebut. Pada
motor DC ini, Eddy-Current losses terjadi pada core atau kumparan dari motor. Eddy- Current Loss menyebabkan arus yang melewati
kumparan berkurang sehingga gaya Lorentz yang terjadi pada kumparan berkurang juga.
Hysteresis Losses,Dalam proses berputarnya, rotor dari motor DC akan mengalami posisi dimana akan terjadi perubahan arah arus pada kumparan. Dalam proses perubahan ini, akan diperlukan sebuah daya tambahan agar arah arus berubah secara sempurna. Daya tambahan inilah yang disebut dengan Hysteresis Loss.
1. Mechanical Losses, adalah inefiseinsi yang diakibatkan oleh adanya gaya hambatan
yang bekerja pada struktur bergerak pada mesin DC. Pada umumnya, mechanical losses
pada mesin DC terdapat dua jenis yaitu :
Frictional Losses, rugi-rugi gesekan adalah daya tambahan yang dibutuhkan untuk melawan gesekan yang muncul pada part motor. Banyak part pada motor DC yang
30
Windage Losses, rugi-rugi yang muncul akibat adanya gesekan atau tahanan udara yang dialami part mesin DC yang bergerak.
f.pengaturan kecepatan pada mesin DC
Dalam penggunaan mesin DC, tidak akan berguna apabila tidak bisa dikontrol kecepatan perputaran dari mesin DC tersebut. Berikut adalah beberapa metode yang biasa digunakan untuk mengontrol kecepatan dari mesin DC.
1. Mengubah voltase pada motor, namun membiarkan medan magnetnya tetap
2. Mengubah medan magnet pada motor, namun membiarkan voltasenya tetap
3. Memberikan hambatan yang dipasang seri dengan motor.
2.4 Baterai dan akumulator 2.4.1 Pengertian Baterai
31
elektrolit(penghantar). Baterai berisi bahan-bahan kimia yang dapat memproduksi elektron.
Reaksi kimia yang dapat menghasilkan elektron disebut dengan Reaksi Elektrokimia.Dalam operasi elektrolit, yang terdiri karbon tanah, mangan dioksida, amoniak sal, dan seng klorida menyebabkan elektron mengalir dan menyebabkan listrik. Baterai memiliki dua terminal, terminal pertama bertanda positif (+) dan terminal kedua bertanda negatif (-).
Gambar 2.20 Susunan dasar suatu baterai
Elektron-elektron di kumpulkan pada kutub negatif. Jika kabel dihubungkan antara kutub negatif dan kutub positif, maka elektron akan mengalir dari kutub negative ke kutub positif dengan cepatnya. Selain kabel, sebuah penghubung atau Load dapat berupa light bulb, sebuah motor atau sirkuit elektronik seperti radio.
32
kutub positif tempat dimana reaksi kimia tersebut sedang berlangsung. Baterai bisa bertahan selama satu tahun dan masih memiliki sedikit power, selama tidak terjadi reaksi kimia atau selam tidak dihubungkan dengan kabel atau sejenis Load lain. Ketika dihubungkan dengan kabel maka reaksi kimia dimulai. Secara harfiah baterai berfungsi sebagai media penyimpan dan penyedia energy listrik. Sumber listrik yang digunakan sebagai pembangkit power dalam bentuk arus searah (DC). Alat ini digunakan elektronika termasuk diantaranya komputer. Baterai merupakan sekumpulan sel-sel kimia yang masing-masing berisi dua elektron logam yang dicelupkan dalam larutan penghantar yang disebut elektrolit. Akibat reaksi-reaksi kimia antara konduktor-konduktor dan elektrolit satu elektroda anoda bermuatan positif dan lainnya, katoda , menjadi bermuatan negatif.
Gambar 2.21 Konstruksi Baterai
33
untuk menyimpan energi karena kondisi cuaca. Beberapa faktor dapat berdampak pada kapasitas baterai, termasuk peringkat, penilaian of discharge (pembebanan), kedalaman pembebanan, suhu, umur, dan karakteristik recharging. Kapasitas yang diminta juga dipengaruhi oleh ukuran muatan. Jika muatan berkurang, kapasitas juga berkurang.
Dengan semakin berkembangnya era globalisasi, terdapat suatu alat elektrokimia yang mirip dengan baterai. Sel bahan bakar adalah sebuah alat elektrokimia yang mirip dengan baterai, tetapi berbeda karena dia dirancang untuk dapat diisi terus reaktannya yang terkonsumsi; yaitu dia memproduksi listrik dari penyediaan bahan bakar hidrogen dan oksigen dari luar. Hal ini berbeda dengan energy internal dari baterai. Sebagai tambahan, elektroda dalam baterai bereaksi dan berganti pada saat baterai diisi atau dibuang energinya, sedangkan elektroda sel bahan bakar adalah katalitik dan relatif stabil.
Reaktan yang biasanya digunakan dalam sebuah sel bahan bakar adalah hidrogen di sisi anode dan oksigen di sisi katoda (sebuah sel hidrogen). Biasanya, aliran reaktan mengalir masuk dan produk dari reaktan mengalir keluar. Sehingga operasi jangka panjang dapat terus menerus dilakukan selama aliran tersebut dapat dijaga kelangsungannya.
34
hidrogen murni dalah uap air. Namun ada kekhawatiran dalam proses pembuatan hidrogen yang menggunakan banyak energi. Memproduksi hidrogen membutuhkan "carrier" hydrogen (Biasanya bahan bakar fosil, meskipun air dapat dijadikan alternatif), dan juga listrik, yang diproduksi oleh bahan bakar konvensional. Meskipun sumber energy alternatif seperti energi angin dan surya dapat juga digunakan, namun sekarang ini mereka sangat mahal.
2.4.2 KlasifikasiBaterai
Bateraidikelompokkanmenjadi 2 (dua), yaitu:
A. Baterai Primer
Baterai primer yaitu baterai yang hanya digunakan satu kali karena menggunakan reaksi kimia yang bersifat tidak bisa dibalik (irreversible reaction)
dan setelah habis isi (Recharge). Adapun susunan baterai primer ditunjukkan pada gambar 2.21
35
Pada baterai primer, elektroda positif (kutub positif) berupa batang karbon dan pembungkus terbuat dari seng yang merupakan elektroda negative (kutub negatif). Elektrolit larutan yang menghantarkan arus listrik berupa larutan ammonium klorida (N ) dan depolarisasinya zat kimia yang terbuat dari mangan dioksida (Mn ) bercampur serbuk karbon.Elemen kering atau batere disebut juga elemen primer karena elemen ini tidak dapat dimuati (diisi ulang) kembali jika muatannya habis.Selama bekerja, seng berubah menjadi iseng klorida, hydrogen dibebaskan dan sengserta ammonium klorida berkurang.Cara penggunaan batere kering yaitu dengan menghubungkan kutub positif dan kutub negative kebeban.
B. Baterai Sekunder
Baterai sekunder yaitu baterai yang dapat digunakan berkali-kali dengan mengisi kembali muatannya karena reaksikimianya bersifat bias dibalik (reversiblereaction), apabila telah habis energinya
36
bahan penyekat (isolator).Konstruksinya ditunjukkan oleh Gambar 2.23
Gambar 2.23 Konstruksi akumulator
Bagianbagian akumulator timah hitam dan fungsinya sebagai berikut :
1.Rangka, berfungsisebagai rumah akumulator.
2.Kepala kutub positif, berfungsi sebagai terminal kutub positif.
3.Penghubung sel, berfungsi untuk menghubungkan sel-sel.
4. Tutup Ventilasi, berfungsi menutup lubang sel.. 5.Penutup, berfungsi untuk menutup bagian atas
akumulator.
6. Plat-plat, berfungsi sebagai bidang pereaktor.
7. Plat negatif, terbuat dariPb, berfungsi sebagai bahan aktif akumulator.
37
9. Ruang sedimen, berfungsi untuk menampung kotoran.
10.Plastik pemisah, berfungsi untuk memisahkan plat positif dan negatif.
38
39
BAB III METODOLOGI
3.1 Diagram Alirdan Metode Penelitian
Metode yang digunakan dalam suatu analisa atau studi harus terstruktur dengan baik sehingga dapat memudahkan dalam menerangkan atau menjelaskan penelitian yang telah dilakukan.Oleh karena itu dalam penelitian ini digunakan pemodelan dan analisa yang dapat diuraikan seperti diagram alir. Berikut adalah langkah-langkah dalam pengerjaan dalam tugas akhir ini:
1. Pencarian study literature tentang motor DC 2. Mendapatkan rumusan masalah yang ada di
lapangan setelah melakukan proses pencarian studi literature
3. Melakukan proses rewiring dan recoiling motor listrik untuk kemudian dianalisa pada matlab 2009a untuk memperoleh data yang actual. 4. Melakukan perhitungan agar sesuai dengan
performance motor DC yang diinginkan
5. Melakukan pengecekan tentang kesesuaian jika tidak sesuai maka harus melakukan perhitungan ulang
6. Melakukan eksperimen
7. Membandingkan hasil data analysis yang sudah ada dengan eksperimen
40 Start
Studi Literatur
Rumusan Masalah
Proses recoiling dan rewiring pada
motor DC
Pengujian dengan LCR
meter
Pengujian dan Perhitungan motor listrik untuk torsi
dan RPM
Sesuai
Tidak
B A
Ya
41
42
D E
Pengujian
Sesuai
Selesai
Gambar 3.3 Diagram alir perhitungan nilai torsi dan optimasi pada program matlab
43
44
3.2Desain dan analisis system kendali pada sepeda motor listrik dengan motor DC Pada Program matlab 2009a
3.2.1 Perencanaan desain motor DC
Perencanaan desain motor yang dilakukan mennggunakan simulink yang terdapat pada program MATLAB 2009a. Model yang diinginkan telah ada pada program MATLAB 2009a namun perlu diganti beberapa parameter untuk menyesuaikan dengan motor DC yang telah di beli.Dalam MATLAB 2009a terdapat 3 bagianutama yang dikelompokkandalam motor DC yaitu :
1. Permanent Magnet Synchronous System 2. DC bus and Converter
3. Controllers
Berikut ini merupakan nilai default pada bagian permanent magnet synchrous system pada matlab 2009a:
45
Berikutnilai Default padabagian Converters and DC bus :
Tabel 3.2 Nilai Default DC bus and Converter
N
o BagianPada Motor DC Parameters Nilai Satuan 1 Snubbers Resistance Ohm 2 Snubbers Capacitanc
46
Chopper Activation Voltage 320 Volt 11 Braking 19 Snubbers Capacitanc
e Inf Farad 20 Mechanica
47
Berikutnilai default pada motor DC padabagiancontroller:
Table 3.3 Nilai default controller No Bagianpada
Motor DC Parameter Nilai Satuan
1 Regulation
type Speed Regulation 2 Speed
Ramps Acceleration 1000 Rpm
3 Spees
ramps Deceleration 1000 Rpm
4 PI regulator Proportional gain 3,3 5 PI
Regulator Integral gain 300
6 Current
Control Sampling Time 20 x Sekon 7 Current
Control Current controller hysteresis
0,01 Ampere
48
Control switching fraquency
9 Speed
Controller Speed cutoff frequency 285 Hz
10 Speed
Controller Speeds controller sampling
3.2.2 Perhitungan Daya Input dan Output
49
P = V. I (3.1)
Untuk Induktansi dan tahanan pada motor DC di lakukan proses percobaan. Adapun alat yang di butuhkanadalah :
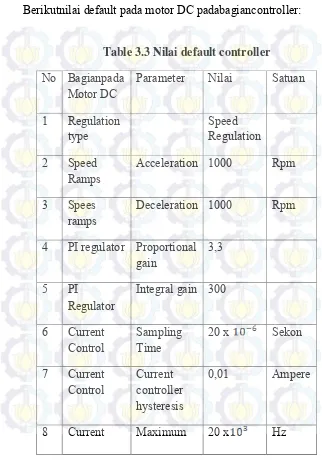
1. Motor DC yang telah di buka
Gambar 3.5Tampilan dalam motor DC
SpesikasiUntuk Motor DC padagambar 3.6 adalah : r : 26 cm
Voltage : 48 Volt Frekuensi : 60 Hz RPM : 500 Daya : 800 Watt
50
Gambar 3.6 LCR Meter
Merek : BK Precision
Ukuran (p x l x t ) : 21,5 cm x 8 cm x 28 cm Specifications :
Inductance
Range : 20uH~2000H Resolution : 0.001uH Basic Accuracy : +/-(0.2+5d)
Capacitance
Range : 20pF~20mF Resolution : 0.001pF Basic Accuracy : +/-(0.2+3d)
Resisitance
Range : 20Ohms~2000MOhms Resolution : 0.001Ohm
Basic Accuracy : +/-(0.2+2d)
51
Gambar 3.7 Controller
Ukuran Controller (p x l x t ) = 15 cm x 8 cm x 4 cm
3.2.3 Identifikasi Torsi dan RPMpada motor DC RPM pada Motor DC di dapatmelalui proses percobaan. Adapunalat yang digunakanadalah :
1. Tachometer
Gambar 3.8 Tachometer
52
Voltage Input : 9 Volt
Konsumsi Power :Approx.45mA JangkauanPengujian : 2 to 20.000 RPM Akurasi : +/- (0,05% + 1 digit )
Resolusi :0,1 RPM (2 to 9999,9 RPM / 1 RPM (Over 100000 RPM ) Waktu Sampling : 0,5 sec (over 120 RPM) JarakJangkauanPengujian : 50 mm to 500 mm 2.Motor DC yang telah di tempeli Reflektor
Gambar 3.9 Motor DC
Sedangkan untuk Torsi di dapat melalui proses penghitungan. Adapun penghitungan yang dilakukan adalah :
53
Lalu dilakukan perhitungan pole dengan menggunakan rumus :
n = ( 3. 3)
3.3 Pengujian Eksperimen 1. Pengujian RPM
1. Penyiapan roller sebagai disturbance
Gambar 3.11 Roller
Keteranagan :
1.Dimensi roller = panjangjari – jari 3 cm 2. Menyiapkan tachometer
54
1. Menyiapkan rangkaian motor DC yang siap dijalankan
2. Menyiapkan tang Ampere
Gambar 3.13 Tang Ampere
Keterangan :
Dimensi( p x l ) = 26 cm x 6 cm
3. Perhitungan
55 BAB IV
HASIL DAN PEMBAHASAN
4.1 PenentuanInduktansi, Resistansi, danKapasitansi DariMotor DC
LCR meter berfungsi untuk mengetahui nilai dari induktansi, resistansi dan kapasitansi dari motor. Bahan dan alat yang dibutuhkan dalam pengujian ini yaitu cukup motor DC yang telah dibuka dan LCR meter.Dalam pengujian ini, motor DC yang saya gunakan adalah motor DC yang memiliki daya 800 Watt dan tegangan 48 Volt.
Gambar 4.1 LCR Meter yang tersambung dengan Motor DC
Dari pengujian yang telah dilakukan pada motor DC sebelum dilakukan proses rewiring dan recoiling yang
encoder Motor
ygtelahdibuka
PenjepitHitam
56
digunakan pada sepeda motor listrik dengan menggunakan LCR meter didapatkan nilai resistansi, kapasitansi, dan induktansi yaitu untuk nilai resistansi yang didapat adalah sebesar 0,156 ohm dan nilai Induktansi sebesar 0,51 x Henry. Setelah dilakukan proses rewiring dan recoiling pada motor DC nilainya berubah dengan nilai sebagai berikut:
Nilai Induktansi (LS) = 160,5 µH Nilai Kapasitansi (CS) = -15,77 nF Nilai Impedansi(ZS) = 0,5Ω Nilai Resistansi(RS) = 1,218 Ω
Nilai Induktansi (LP) = 208,4µH Nilai Kapasitansi (CP) = -12,37nF Nilai Impedansi(ZP) = 113,9 Ω
Nilai Resistansi(RP) =0,218 Ω
57
4.2 Perencanaan Desain Motor DC Dengan Software Matlab 2009a
Perencanaan desain motor DC dilakukan menggunakan program symulink pada MATLAB 2009a. Namun melalui beberapa penyesuaian yang harus dilakukan karena ada beberapa parameter yang harus diganti untuk mendapatkan parameter dari nilai data motor DC yang telah dilakukan proses rewiring dan recoiling.
Gambar 4.2 Pemodelan Motor DC
Didalam motor DC yang terdapat pada MATLAB 2009a terdapat berbagai parameter yang dikelompokkan. Secara umum ada 3 jenis parameter yang di kelompokkan secara umum yaitu :
1. Permanent Magnet Synchronous Machine 2. Converter dan DC bus
58
4.2.1 Permanent Magnet Synchronous Machine Tentang Permanent Magnet Synchronous Machine dapat di lihat bahwa untuk pengisian parameter pada Permanent Magnet Synchronous Machine memperlukan pengubahan pada beberapa bagian mulai dari Induktansi, Resistansi, Back EMF, momen inertia,pole pairs dan gesekan yang ditimbulkan. Untuk data-data nilai induktansi resistansi dan kapasitansi telah didapat kan dari uji LCR meter di atas.
4.2.2 Converter dan DC Bus
Untuk pengisian pada parameter converter dan DC bus tidak banyak dilakukan banyak perubahan karena keterbatasan speksifikasi yang bisa di dapat dari jenis motor DC dan Controller yang telah di uji sehinga di putuskan pengisian parameter di dapat secara default dan hanya mengubah pada device type pada inverter.Karena pada device type pada inverter saat default berjeniskan IGBT/Dioda.Namun setelah diamati maka device type di rubah menjadi jenis MOSFET.
4.2.3 Controller
59
dilakukan proses perhitungan secara manual karena keterbatasan alat yang digunakan untuk pengujian torsi.
1. Pengujian RPM
Tempelkan Reflektor pada motor DC yang akan di ukur RPM nya
C. Karakterisasi motor DC
Setelah dilakukan pengujian di dapat hasil bahwa Putaran Motor yang di hasilkan dari motor DC yang kita miliki sebsesar 500 RPM
2. Penentuan nilai torsi
60
harus mengubah putaran menjadi kecepatan sudut. Adapun penghitungannya adalah sebagai berikut :
Maka penghitungan Torsi yang dilakukan adalah :
P = T x ω 785,2 = T x 48,91 T =16,054 Nm
3. Penentuan nilai pole pairs
Pole pairs adalah pasangan pole yang terdapat pada motor DC. Sebenarnya parameter pole pairs terdapat pada bagian awal namun penentuannya harus berdasarkan nilai RPM sehingga penentuannya dilakukan pada bagian akhir. Adapun perhitungannya adalah sebagai berikut :
61
Maka di bulatkan menjadi 12.
Karena pole pairs merupakan pasangan maka jumlah pole pairs adalah 6.
4.2.4 Hasil Karakteriksasi dan Pengisian parameter Dari semua Hasil eksperimen dan penghitungan secara numeric di dapat data sebagai berikut :
L = 0,51 x H R = 0,156 Ω RPM = 500 T = 15,28 Nm P = 6 pasang
62
Gambar 4.3 Parameter Brhussless Dc motor drive pada Program Matlab
Untuk memasukkan parameter pada program Matlab kita harus membuka Program matlab dan memilih Program untuk simulasi motor DC dengan cara mengetik pada colom comond list dengan ac7_example maka akan muncul block diagram seperti gambar 4.3.
Setelah itu kita harus mengubah beberapa parameter yang ada pada kolom tersebut karena pada kolom-kolom yang tersedia telah disetting dengan nilai default maka kita harus mengubahnya dengan nilai yang telah didapat dari uji-uji yang telah dilakukan.
63
kolom ac7 yang ada pada parameter block gambar 4.3 setelah memilih pilihan tersebut maka akan muncul gambar block seperti gambar 4.4 di bawah ini:
Gambar 4.4 Parameter block Brushless motor drive
64
Untuk melihat grafik hasil uji coba pada software matlab yaitu dengan cara mengklick tombol scope pada kolom brhussles Motor Drive seperti pada gambar 4.3 setelah itu maka akan muncul data grafik seperti berikut:
Gambar 4.5 Grafik hasil uji dengan software matlab
65 Gambar 4.6 work pice
Setelah muncul kolom workpiece pilih simtout setelah itu maka akan pada kolom simtout akan muncul seperti gambar berikut:
66
Pada bagian simtout terdapat tiga pilihan yaitu time signals dan blocknames maka pada bagian ini pilih time dan kemudian akan muncul data-data sebagai berikut:
Gambar 4.8 data hasil simtout
67 ini:
Gambar 4.9 Data time pada commond list
Setelah itu pada bagian workpiece pilih kolom signal kemudian akan muncul empat pilihan dari keempat data tersebut akan menunjukkan data dari RPM dan tegangan serta torsi yang kemudian akan menunjukkan grafik dari masing-masing data tersebut.
68 Gambar 4.10 Simtout signals
69
Table 4.2 Perubahan data pada converter DC Bus
70
Table 4.3 Perubahan data pada Controller
71
Setelah semua data dirubah sesuai dengan data pada tabel di atas maka akan muncul gambar grafik untuk masing-masing data sebagai berikut:
1.
Grafik 4.1Analisis arus
72 2.
.
Grafik 4.2 Analisis nilai RPM
Grafik ini menjelaskan nilai RPM dari niali grafik diatas terlihat semakin lama waktu maka grafik akan semakin tinggi. Terlihat bahwa perlu sekitar 1.2 detik untuk mencapai nilai puncak sebesar 290 RPM.
73
Grafik 4.3 Nilai RPM reference atausetpoint
Grafik 3 menjelaskantentang RPM reference atau RPM set point. Yang di maksud RPM set point adalah kemampuan RPM untuk didapat secara maksimal dari grafik RPM. RPM reference didapat juga pada kondisi ideal.Terlihat pada grafik 3 RPM set point motor DC dapat bekerja secara lancar dengan percepatan dan perlambatan yang stabil.
4.
Grafik 4.4 Nilai torsi
Grafik ini menjelaskan nilai torsi yang terjadi dari motor DC berupa electromagnetis torsi yaitu nilai torsi yang terdapat pada permanent magnet synchronous.
74 Grafik 4.5 Nilaivotage
Grafik ini menjelaskan voltage yang
dihasilkan.Voltage awal memperlukan voltage sebesar 110 volt kemudian menurun secara perlahan hingga stabil pada 70 volt. Voltage awal memang selalu tinggi karena memperlukan tenaga besar untuk mengangkat sebuah jalannya motor DC.
4.3 Analisis
Perbandingan hasil exsperimen dengan hasil pengujian sebelumnya:
75 Penjelasan :
76
Namun Arus yang mengalir tidak bisa menjadi bahan acuan utama untuk mempengaruhi besarnya Torsi dan RPM. Arus besar belum tentu menghasilkan kecepatan atau RPM dan Torsi yang besar, karena ada beberapa factor lain misalnya rugi – rugi, hambatan, tegangan dll.
2.Perbandingan Nilai RPM
77 Grafik Nilai RPM exsperimen
Penjelasan :
Dari gambar 4.9 dan gambar 4.10 yang menggambarkan tentang grafik rotor speed atau RPM terlihat hasil grafik yang dihasilkan memang terlihat sama. Hal yang terlihat berbeda adalah kemampuan motor DC dalam mecapai kecepatan maksimum.RPM dari grafik hasil analisis lebih lambat dalam mencapai puncak RPM daripada grafik hasil analisis, meskipun perbedaan waktu yang di butuhkan hanya sepersekian detik dan sangat kecil.
78
3.Perbandingan Grafik Nilai Tegangan
Grafik hasil analisis sebelumnya
79 Grafik Hasil Exsperimen
Penjelasan :
Perbedaan input pada tegangan menyebabkan tegangan awal yang berbeda. Pada gambar dan gambar yang menjelaskan tentang grafik hasil analisis dan grafik hasil eksperimen dapat dilihat bahwa input yang berbeda menyebabkan perbedaan tegangan awal yang juga berbeda. Karena input dari eksperimen sebesar 52 volt dan lebih besar dari analisi yang sebsar 48 volt maka pada grafik hasil eksperimen lebih memiliki tegangan yang lebih besar daripada grafik hasil analisis. Sehingga perbedaan tegangan memiliki error sebesar 6-8%. Tegangan awal memang selalu besar karena digunakan untuk pengangkatan motor DC. Kemudian tegangan relative stabil. Semakin tinggi tegangan umumnya berpengaruh pada torsi, karena akan memudahkan pengankatan kinerja motor DC saat pertama kali
dinyalakan, namun belum tentu semakin besarnya tegangan akan akan selalu semakin tinggi torsi yang dihasikan karena masih ada beberapa factor misalnya arus ataupun kecepatan sudut.
4.5 Cara Optimasi
80
penggulungan maka dari itu perlu dilakukan penelitian lebih lanjut mengenai perhitungan nilai losess yang timbul pada sebuah motor listrik tersebut.
Motor mengubah energi listrik menjadi energi mekanik untuk melayani beban tertentu.Efisiensi motor ditentukan oleh kehilangan dasar yang dapat dikurangi hanya oleh perubahan pada rancangan motor dan kondisi operasi. Kehilangan dapat bervariasi dari kurang lebih dua persen hingga 20 persen.
Untuk mengukur efisiensi motor, maka motor harus dilepaskan sambungannya dari beban dan dibiarkan untuk melalui serangkaian uji. Hasil dari uji tersebut kemudian dibandingkan dengan grafik kinerja standar yang diberikan oleh pabrik. Jika tidak memungkikan untuk memutuskan sambungan motor dari beban, perkiraan nilai efisiensi didapat dari table khusus untuk nilai efisiesi motor. Dengan nilai efisiensi motor untuk motor standar yang dapat digunakan jika pabrik pembuatnya tidak menyediakan data ini. Nilai efisiensi disediakan untuk:
Motor dengan efisiesi standar 900, 1200, 1800 dan 3600 rpm
81
Tingkat beban 25%, 50%, 75% dan 100%.
Karena sulit untuk mengkaji efisiensi motor pada kondisi operasi yang normal, beban motor dapat diukur sebagai indikator efisiensi motor. Dengan meningkatnya beban, faktor daya dan efisinsi motor bertambah sampai nilai optimumnya pada sekitar beban penuh. Dengan perhitungan sebagai berikut:
Beban=
=
=
= 80.7 %
beban yang kurang akan meningkatkan kehilangan motor dan menurunkan efisiensi motor dan faktor daya. Beban yang kurang mungkin merupakan penyebab yang paling umum ketidakefisiensian dengan alasan-alasan:
Pembuat peralatan cenderung menggunakan faktor keamanan yang besar bila memilih motor.
82
memberikan nilai motor untuk kapasitas alat dengan beban
penuh. Dalam prakteknya, pengguna sangat jarang membutuhkan kapasitas penuh ini, sehingga mengakibatkan hampir selamanya operasi
dilakukan dibawah nilai beban.
Dipilih motor yang besar agar mampu mencapai keluaran pada tingkat yang dikehendaki, bahkan jika tegangan masuk rendah dalam keadaan tidak normal.
Dipilih motor yang besar untuk penggunaan yang memerlukan torque penyalaan awal yang tinggi akan tetapi lebih baik bila digunakan motor yang lebih kecil yang dirancang dengan torque tinggi.
83
yang lebih kecil merupakan motor yang efisien energinya sedangkan motor yang ada tidak, maka efisiensi dapat meningkat.
4.6 Penjelasan Teori Perubahan Torsi dan RPM
Aturan tangan kanan pada pelajaran fisika ini merupakan cara yang efektif untuk mengetahui arah medan listrik terhadap arus listrik. Jika seutas kawat tembaga diberi aliran listrik, maka di sekeliling kawat tembaga akan terbentuk medan listrik. Dengan aturan tangan kanan dapat diketahui arah medan listrik terhadap arah arus listrik. Caranya sederhana yaitu dengan mengacungkan jari jempol tangan kanan sedangkan keempat jari lain menggenggam. Arah jempol adalah arah arus dan arah ke empat jari lain adalah arah medan listrik yang mengitarinya.
Dengan percobaan dua utas kawat tembaga paralel yang keduanya diberi arus listrik. Jika arah arusnya berlawanan, kedua kawat tembaga tersebut saling menjauh. Tetapi jika arah arusnya sama ternyata keduanya berdekatan saling tarik-menarik. Hal ini terjadi karena adanya induksi medan listrik. Dikenal medan listrik dengan simbol B dan satuannya Tesla (T). Besar akumulasi medan listrik B pada suatu luas area A tertentu difenisikan sebagai besar magnetic flux. Simbol yang biasa digunakan untuk menunjukkan besar magnetic flux ini adalah F dan satuannya Weber (Wb = T.m2).
84
dialiri listrik maka tiap lilitan akan saling menginduksi satu dengan yang lainnya. Medan listrik yang terbentuk akan segaris dan saling menguatkan. Komponen yang seperti inilah yang dikenal dengan induktor selenoid.
Dari buku fisika dan teori medan, dibuktikan bahwa induktor adalah komponen yang dapat menyimpan energi magnetik. Energi ini direpresentasikan dengan adanya tegangan emf (electromotive force) jika induktor dialiri listrik.
Jika dibandingkan dengan rumus hukum Ohm V=RI, maka kelihatan ada kesamaan rumus. Jika R disebut resistansi dari resistor dan V adalah besar tegangan jepit jika resistor dialiri listrik sebesar I. Maka L adalah induktansi dari induktor dan E adalah tegangan yang timbul jika induktor dilairi listrik. Tegangan emf di sini adalah respon terhadap perubahan arus fungsi dari waktu terlihat dari rumus di/dt. Sedangkan bilangan negatif sesuai dengan hukum Lenz yang mengatakan efek induksi cenderung melawan perubahan yang menyebabkannya.
Hubungan antara emf dan arus inilah yang disebut dengan induktansi, dan satuan yang digunakan adalah (H) Henry.
Induktor disebut self-induced
85
dalam mendesain pcb supaya bebas dari efek induktansi terutama jika multilayer. Tegangan emf akan menjadi penting saat perubahan arusnya fluktuatif. Efek emf menjadi signifikan pada sebuah induktor, karena perubahan arus yang melewati tiap lilitan akan saling menginduksi. Ini yang dimaksud dengan self-induced. Secara matematis induktansi pada suatu induktor dengan jumlah lilitan sebanyak N adalah akumulasi flux magnet untuk tiap arus yang melewatinya.
Fungsi utama dari induktor di dalam suatu rangkaian adalah untuk melawan fluktuasi arus yang melewatinya. Aplikasinya pada rangkaian dc salah satunya adalah untuk menghasilkan tegangan dc yang konstan terhadap fluktuasi beban arus. Pada aplikasi rangkaian ac, salah satu gunanya adalah bisa untuk meredam perubahan fluktuasi arus yang tidak dinginkan. Akan lebih banyak lagi fungsi dari induktor yang bisa diaplikasikan pada rangkaian filter, tuner dan sebagainya.
Dari pemahaman fisika, elektron yang bergerak akan menimbulkan medan elektrik di sekitarnya. Berbagai bentuk kumparan, persegi empat, setegah lingkaran ataupun lingkaran penuh, jika dialiri listrik akan menghasilkan medan listrik yang berbeda. Penampang induktor biasanya berbentuk lingkaran, sehingga diketahui besar medan listrik di titik tengah lingkaran.
86
dinamakan permeability dan mo yang disebut permeability udara vakum. Besar permeability m tergantung dari bahan inti (core) dari induktor. Untuk induktor tanpa inti (air winding) m = 1.
Kawat tembaga
87
Gambar 4.5 Gulungan kawat
Dalam gulungan kawat, medan magnet dari masing-masing senyawa kawat bersama untuk membentuk medan magnet yang cenderung menolak perubahan saat ini, seolah-olah saat ini memiliki inersia. Hal ini dikenal sebagai diri-induksi.
Dalam kumparan rotor, ada kecenderungan saat ini untuk terus mengalir untuk sesaat setelah sikat telah tercapai. Energi ini terbuang sebagai panas karena sikat mencakup seluruh segmen komutator beberapa arus pendek yang tidak disengaja di seluruh segmen.
Resistensi palsu adalah peningkatan nyata dalam perlawanan dalam gulungan dinamo, yang sebanding dengan kecepatan angker, dan ini disebabkan oleh tertinggal dari arus.
88
ini arus pendek, sikat yang maju beberapa derajat lebih jauh namun, di luar muka distorsi lapangan. Ini memindahkan gulungan rotor menjalani pergantian sedikit ke depan ke bidang stator yang memiliki garis-garis magnet dalam arah yang berlawanan dan yang menentang lapangan dalam stator. Bidang ini menentang membantu untuk membalikkan
tertinggal diri inducting saat ini di stator.
Jadi bahkan untuk rotor yang sedang beristirahat dan awalnya tidak memerlukan kompensasi untuk distorsi bidang pemintalan, kuas harus tetap maju di luar sudut 90 derajat sempurna seperti yang diajarkan dalam buku teks pemula begitu banyak, untuk mengimbangi diri-induksi.
Komutator atau cincin belah (split ring) berfungsi
untuk membalik arah arus pada setengah siklus negatif dari arus bolak balik. Kontak-kontak listrik pada rotating ring disebut “Brush“. Pada awalnya, dalam motor digunakan Brush tembaga. Motor-motor modern biasanya menggunakan kontak-karbon spring-loaded.
89
dimana Rf dan Lf merupakan resistansi dan induktansi pada field sircuit. K merupakan konstanta mesin(tergantung desain). φ adalah magnetic flux dan ωm adalah kecepatan sudut rotor. Tdev merupakan torsi
yang dihasilkan. Ia adalah arus dari armature. Ea adalah tegangan armatur. dan P merupakan daya.
90
Dari data perubahan tegangan terlihat bahwa adanya perubahan tegangan mengakibatkan terjadinya perubahan kecepatan. Seperti dalam teori yang dibahas sebelumnya, bahwa kopel sebanding dengan pangkat dua tegangan yang diberikan terminal primernya. Maka saat tegangan diturunkan, kopel yang diterima rotor juga akan ikut turun.
91
92
91
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Setelah dilakukan proses recoilerdan rewiring kemudian dilakukan pemodelan yang telah disimulasikan dengan menggunakan program matlab 2009a yang menunjukkan bagian pada motor DC pada stator current rotor speed electromagnetic torque dan DC bus Voltage memiliki nilai dan grafik yang berbeda-beda. Dari data matlab 2009a di dapatkan 4 grafik output yaitu:
1. Grafik stator current yang mewakili arus yang mengalir pada motor DC
2. Grafik rotor speed menerangkan tentang kecepatan pada motor DC atau RPM 3. Grafik elektromagnetik menjelaskan torsi
yang dihasilkan motor DC
4. Grafik DC bush menjelaskan tentang daya
92
menggunakan rangklaian cooler atau pendingin pada bagian motor.
5.2 Saran
LAMPIRAN
Gambar Pemodelan brushless Motor DC pada matlab