BAB III
PERANCANGAN DAN PEMBUATAN ALAT
Dalam bab ini akan dibahas mengenai pembuatan dan perancangan Prototype Mesin CNC. Perancangan prototype ini terdapat tiga tahapan yaitu perancangan mekanik, elektrikal dan pemrograman.
3.1 Blok Diagram
Untuk dapat mengirimkan sekumpulan kode – kode G yang telah di konversi dari bentuk gambarnya oleh Software Inkscape diperlukan Universal G- Code Sender yakni Software GBRL Controller. GBRL Controller akan mengirimkan G-Code via komunikasi serial secara kontinu ke Arduino UNO.
Ketika satu baris G-Code telah tereksekusi, maka GBRL Controller akan mengirimkan lagi baris berikutnya.
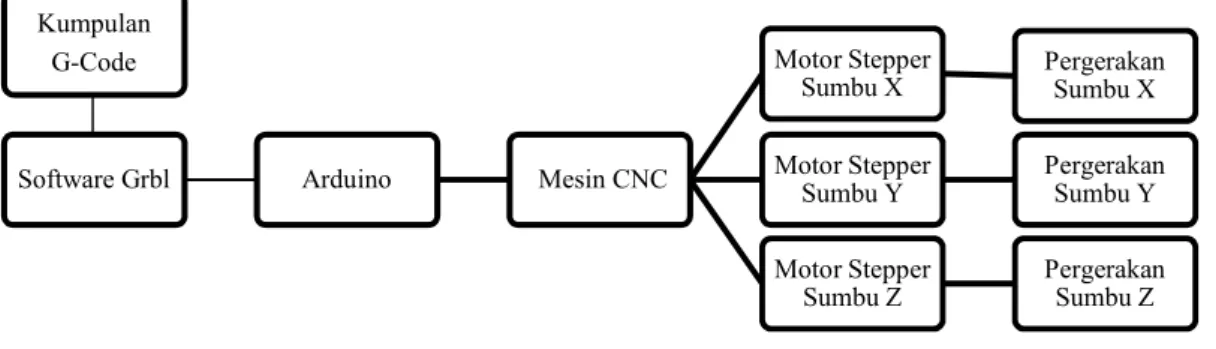
Untuk dapat menggerakkan sistem X, Y dan Z pada prototype mesin CNC, diperlukan tiga buah motor stepperseperti pada Gambar 3.1.
Gambar 3.1Blok Diagram Prototype Mesin CNC
Motor stepper yang digunakan pada perancangan ini adalah motor stepper bipolar NEMA 17. Motor stepper driver dan translator yang digunakan adalah IC A4988. Arduino UNO memproses dan mengeksekusi data yang dikirimkan via serial oleh Software GBRL Controller.
Tiga buah motor stepper akan bergerak sesuai dengan program yang telah dibuat. Masing-masing motor stepper akan menggerakkan end effector dari prototype mesin CNC yang sesuai dengan sumbu X, Y dan Z.Visualisasi gerak dan koordinat End Effector terlihat di software GBRL Controller.
3.2 Perancangan Mekanik
Perancangan mekanik prototype mesin CNC ini sebelumnya dibuat sketsa gambar pada kertas A3. Perancangan konstruksi mesin CNC meliputi bagian dasar, tiang sumbu Y, sumbu Y , sumbu Z dan bagian End Effector.
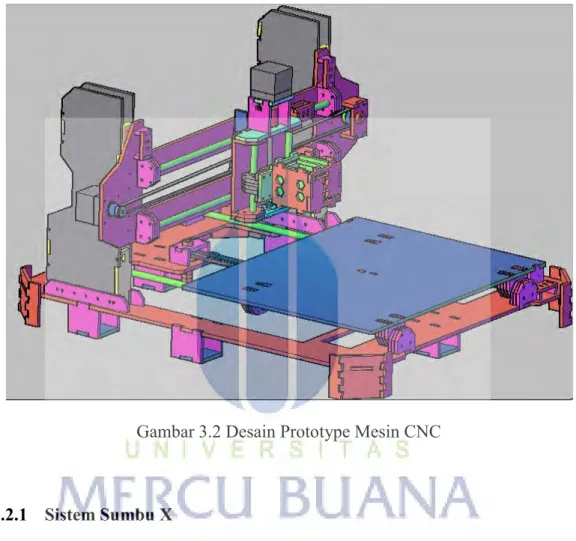
Untuk membuat simulasi konstruksi 3D dan pemotongan desain diperlukan Software Autocad seperti yang terlihat pada Gambar 3.2.Prototype mesin CNC ini
Software Grbl Arduino Mesin CNC
Motor Stepper Sumbu X
Pergerakan Sumbu X
Motor Stepper Sumbu Y
Pergerakan Sumbu Y
Motor Stepper Sumbu Z
Pergerakan Sumbu Z Kumpulan
G-Code
konstruksi sumbu Z.
Gambar 3.2 Desain Prototype Mesin CNC
3.2.1 Sistem Sumbu X
Sistem sumbu X merupakan bagian yang bergerak berdasarkan sumbu X yaitu bergerak horizontal ke kanan dan ke kiri.Sistem pergerakan linier dalam sumbu ini menggunakan timing belt dan pulley.
Timing belt yang digunakan dalam perancangan ini adalah jenis gigi circular. Jenis ini dapat mereduksi slip karena bentuk giginya yang setengah lingkaran. Pulley yang digunakan adalah tipe GT2. Dengan bentuk gigi
trapezoidal gigi berjumlah 16.Ukuran dari pulley GT2 seperti Gambar 3.3 dibawah ini.
Gambar 3.3 Dimensi Pulley GT2
Kalibrasi alat mutlak diperlukan dalam perancangan ini, untuk menghasilkan ukuran yang sama seperti ukuran yang terdapat pada komputer.
Pada perancangan sumbu X dan Y memiliki sistem pergerakan linier yang sama, yakni menggunakan pulley dan timing belt. Motor stepper NEMA 17 memiliki resolusi 200 step per revolution tanpa mode microstepping. Jadi satu step motor stepper, mengalami perpindahan angular sebesar:
ℎ = ℎ
ℎ ℎ
360
200 1= 1.8
Pitch atau jarak antar gigi dari pulley GT2 adalah 2,4 mm. Dengan jumlah gigi pulley 16 maka keliling lingkaran nya adalah 16 x 2,4 = 38,4 mm. Tiap satu step motor stepper, mengalami perpindahan linier sejauh :
ℎ = ℎ
ℎ ( ℎ ℎ )
1.8
360 38.4 = 0.192 /
Jadi untuk pergerakan linier 1 milimeter, jumlah step pada motor stepper NEMA 17 adalah :
ℎ / = 1
ℎ
1
0,192= 5.2 /
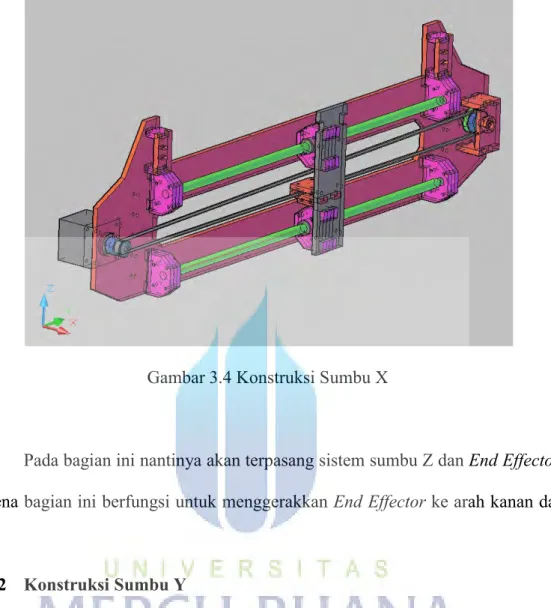
Jalur pergerakan sumbu X menggunakan dua buah besi berbentuk silinder berdiameter 8 mm dan linier bearing tipe LM8UU dengan diameter lubang dalam 8 mm, bodi luar 15 mm dan tinggi 24 mm.Sistem Pergerakan X ini terdapat pada bagian atas prototype mesin CNC seperti pada Gambar 3.4.
Gambar 3.4 Konstruksi Sumbu X
Pada bagian ini nantinya akan terpasang sistem sumbu Z dan End Effector, karena bagian ini berfungsi untuk menggerakkan End Effector ke arah kanan dan kiri.
3.2.2 Konstruksi Sumbu Y
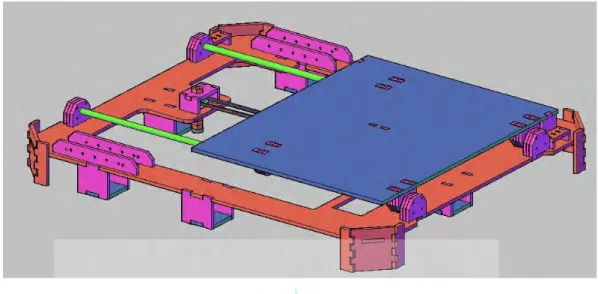
Sistem sumbu Y seperti pada Gambar 3.5 merupakan bagian yang bergerak berdasarkan sumbu Y yaitu bergerak horizontal kearah depan dan belakang. Sistem pergerakan linier dalam sumbu ini sama seperti sumbu X yakni menggunakan timing belt dan pulley. Sistem Y ini merupakan tempat penampang benda kerja. Penampang ini memiliki ukuran workspace sama dengan kertas berukuran A4.
Gambar 3.5 Konstruksi Sumbu Y
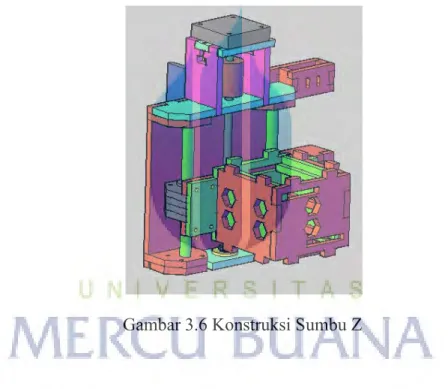
3.2.3 Konstruksi Sumbu Z
Sistem sumbu Z seperti pada Gambar 3.6 menyatu dengan slider sumbu X.
Sistem sumbu Z merupakan bagian yang bergerak berdasarkan sumbu Z yaitu bergerak vertikal kearah atas dan bawah.
Sistem pergerakan sumbu ini menggunakan threaded rod berdiameter 5 mm dan baut. Coupler digunakan sebagai sambungan antara shaft motor dengan threaded rod. Bagian yang bergerak pada sumbu Z di disisipkan Nut atau Baut, prinsipnya ketika motor berputar maka baut akan bergerak ke atas maupun ke bawah karena ulir pada threaded rod tersebut.
Kalibrasi alat pada sumbu Z berbeda dengan sumbu X dan Y, Karena sumbu Z menggunakan sistem threaded rod. Jarak antar ulir pada threaded rod adalah 0,8 mm, jadi satu putaran penuh motor stepper menghasilkan jarak sejauh nilai tersebut. Untuk memperoleh jarak 1 mm maka step per milimeter yang harus dihasilkan pada motor stepper adalah :
ℎ / = 1
ℎ ℎ
1
0,8 200 = 250 /
Bagian yang bergerak pada sumbu Z ini nantinya juga akan tersambung End Effector.
Gambar 3.6 Konstruksi Sumbu Z
3.2.4 Realisasi Perancangan Mekanik
Prototype mesin CNC ini dibuat dengan menggunakan acrylic sebagai bahan utama. Pemilihan acrylic dikarenakan memiliki bobot yang lebih ringan.
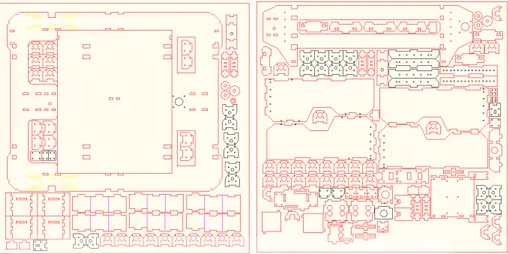
Selain itu acrylic juga lebih mudah dipotong sehingga dapat lebih leluasa untuk membentuk setiap bagian sesuai dengan keperluan prototype mesin CNC. Proses pemotongan acrylic pada perancangan ini menggunakan mesin Laser Cutting dengan desain dua dimensi seperti gambar 3.7 dibawah ini
Gambar 3.7 Desain Dua Dimensi Prototype Mesin CNC
Mekanik prototype mesin CNC dibuat dengan menggunakan bahan akrilik berwarna hitam dengan tebal 5 mm.
Gambar 3.8 Bentuk dari Perakitan Bagian Sumbu X
Realisasi dari konstruksi sumbu X terlihat pada gambar 3.8. Motor stepper ditempelkan ke bodi dengan dua buah baut berdiameter 3 mm. setelah itu pasang pulley dan timing belt. Kedua ujung timing belt dijepit pada konstruksi sumbu Z.
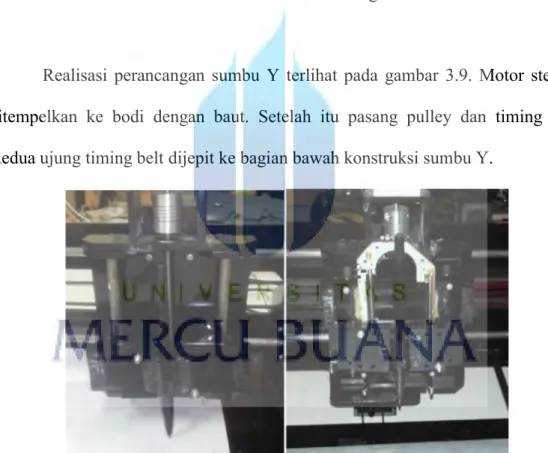
Gambar 3.9 Bentuk dari Perakitan Bagian Sumbu Y
Realisasi perancangan sumbu Y terlihat pada gambar 3.9. Motor stepper ditempelkan ke bodi dengan baut. Setelah itu pasang pulley dan timing belt.
Kedua ujung timing belt dijepit ke bagian bawah konstruksi sumbu Y.
Gambar 3.10 Bentuk dari Perakitan Bagian Sumbu Z
Pada perancangan awal, sumbu Z seperti tampak pada gambar 3.10 sebelah kiri, namun terdapat penyempurnaan dengan menambahkan suspensi seperti pada gambar 3.10 sebelah kanan.
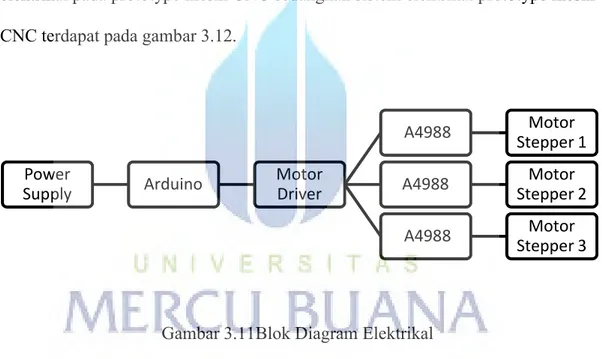
Dalam pembuatan prototype mesin CNC ini tentunya tidak terlepas dari adanya sistem elektrikal.Oleh karena itu untuk mendapatkan sistem elektrikal sesuai kebutuhan maka perlu dilakukan perancangan. Adapun perancangan disini adalah pemasangan power supply, pembuatan rangkaian motor driver untuk motor stepper dengan IC A4988, pemasangan motor stepperdan komponen-komponen pendukung lainya. Pada gambar 3.11 berikut adalah Blok diagram sistem elektrikal pada prototype mesin CNC sedangkan sistem elektrikal prototype mesin CNC terdapat pada gambar 3.12.
Gambar 3.11Blok Diagram Elektrikal Power
Supply Arduino Motor
Driver
A4988 Motor
Stepper 1
A4988 Motor
Stepper 2
A4988 Motor
Stepper 3
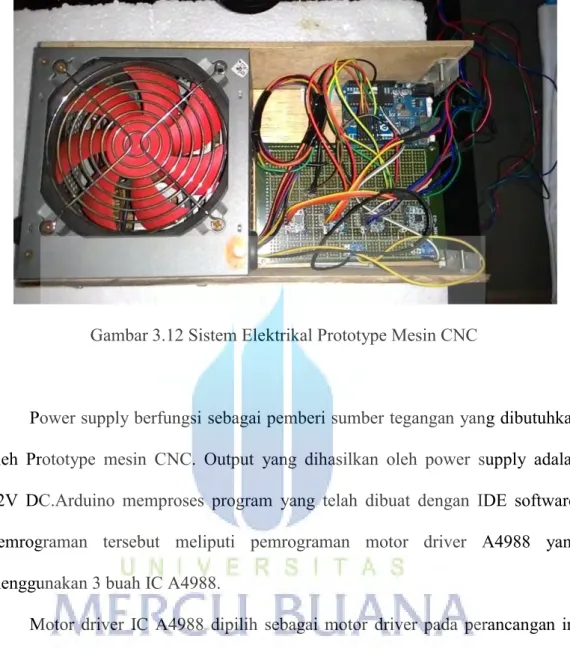
Gambar 3.12 Sistem Elektrikal Prototype Mesin CNC
Power supply berfungsi sebagai pemberi sumber tegangan yang dibutuhkan oleh Prototype mesin CNC. Output yang dihasilkan oleh power supply adalah 12V DC.Arduino memproses program yang telah dibuat dengan IDE software.
Pemrograman tersebut meliputi pemrograman motor driver A4988 yang menggunakan 3 buah IC A4988.
Motor driver IC A4988 dipilih sebagai motor driver pada perancangan ini karena tidak boros pin arduino dan mudah cara dioperasikan. Motor driver pada umumnya hanya menaikkan tegangan output dari input arduino, hal ini sangat boros pin pada arduino mengingat tiap motor stepper bipolar memiliki 4 buah kabel. IC A4988 sangat mudah digunakan karena hanya terdapat dua buah input masukkan yakni DIR dan STEP. DIR berfungsi untuk mengubah arah putaran searah jarum jam dan berlawanan jarum jam. STEP berfungsi untuk mengatur
jedanya. Gambar 2.13 merupakan tipikal layout yang standar untuk IC A4988.
Gambar 2.13 Skematik Diagram A4988
Step per revolution Motor Stepper NEMA 17 adalah 200. Nilai ini dapat dirubah oleh IC A4988 dengan fiturnya yakni microstepping mode.dalam mode ini step per revolution dapat diperbesar dengan faktor pengali. Pengaturan resolusi dari putaran motor terdapat pada pin MS1, MS2 dan MS3 yang dijelaskan pada Tabel 3.1.
Tabel 3.1 Pengaturan Resolusi Motor Stepper
MS1 MS2 MS3 Microstep Resolution Step per Revolution pada NEMA 17
L L L Full Step 200
H L L Half Step 400
H H L Quarter Step 800
H H L Eighth Step 1600
H H H Sixteenth Step 3200
3.3.1 Rangkaian Driver Motor A4988
Untuk dapat menggerakkan motor stepper dibutuhkan IC A4988. Satu buah IC A4988 hanya dapat mengendalikan satu buah motor stepper. Oleh karena itu pada driver motor ini terdapat tiga buah IC A4988 untuk dapat menggerakkan tiga buah motor stepper.Perancangan driver motor A4988 dapat dilakukan dengan mengggunakan Software ISIS Proteus seperti pada Gambar 3.14.
Gambar 3.14Skematik Driver Motor A4988
Pada IC A4988 hanya tujuh buah kaki yang dihubungkan dengan Arduino seperti pada Gambar 3.15, yaitu Stepper Enable, Direction sumbu X, Direction sumbu Y, Direction sumbu Z, Step sumbu X, Step sumbu Y,dan Step sumbu Z,
Gambar 3.15 Keterangan Pin pada Pada Arduino UNO
Power untuk tiga motor stepper menggunakan tegangan dari power supply yang sanggup memberikanoutput arus sampai 20 ampere. Tegangan VCC dari IC A4988 didapat parallel dari Arduino UNO.Empat buah kaki yaitu 1A, 1B, 2A, 2B dihubungkan dengan sebuah motor stepper. Realisasi dari rangkaian motor driver dibuat dengan PCB matrik, jalur rangkaian dibuat dengan deretan timah. Hasil pembuatan rangkaian motor driverA4988 dapat terlihat pada Gambar 3.16.
Gambar 3.16Realisasi Rangkaian Driver Motor A4988
Rangkaian motor driverini menggunakan empat buah IC A4988. tigabuah IC A4988 digunakan untuk menggerakkan tiga buah motor stepper, sedangkan satu buah sisanya digunakan sebagai cadangan apabila salah satu IC A4988 mengalami kerusakan.
3.4 Perancangan Pemrograman
Dalam perancangan prototype mesin CNC ini diperlukan Arduino Programming Tools untuk melakukan pemrograman Arduino dan software GBRL Controller untuk melakukan konfigurasi sistem X, Y, dan Z dan kalibrasi motor stepperpada prototype mesin CNC.
Arduino digunakan untuk mengontrol putaran tiga buah motor stepper melalui IC A4988. Pemrograman pada Arduino dapat menggunakan sebuah software khusus yaitu Arduino Programming Tools. Program yang dibuat melalui Arduino Programming Tools dapat dilihat pada Gambar 3.17.
Gambar 3.17 Pemrograman Arduino
Program yang digunakan tersedia dalam beberapa library arduino yang telah dibuat. Berikut ini keterangan singkat beberapa fungsi library:
< config.h >
Berisi tentang keterangan kegunaan pin pada arduino dan setting bautrate.Berikut potongan program config.
#ifndef config_h
#define config_h
#define DEFAULTS_CNCUMB
// Serial baud rate
#define BAUD_RATE 9600
// inisialisasi pin arduino
#define STEPPING_DDR DDRD
#define STEPPING_PORT PORTD
#define X_STEP_BIT 2 // Uno Digital Pin 2
#define Y_STEP_BIT 3 // Uno Digital Pin 3
#define Z_STEP_BIT 4 // Uno Digital Pin 4
#define X_DIRECTION_BIT 5 // Uno Digital Pin 5
#define Y_DIRECTION_BIT 6 // Uno Digital Pin 6
#define Z_DIRECTION_BIT 7 // Uno Digital Pin 7
#define STEP_MASK
((1<<X_STEP_BIT)|(1<<Y_STEP_BIT)|(1<<Z_STEP_BIT)) // semua step bit
#define DIRECTION_MASK
((1<<X_DIRECTION_BIT)|(1<<Y_DIRECTION_BIT)|(1<<Z_DIRECTION_BIT)) // semua direction bits
#define STEPPING_MASK (STEP_MASK | DIRECTION_MASK) // semua stepping-related bits (step/direction)
#define STEPPERS_DISABLE_DDR DDRB
#define STEPPERS_DISABLE_PORT PORTB
#define STEPPERS_DISABLE_MASK (1<<STEPPERS_DISABLE_BIT)
< defaults.h >
Berisi tentang pengaturan motor dan pergerakan pada mesin CNC misalnya step/mm pada sumbu XYZ, feed rate, seek rate, percepatan dan lain – lain. Berikut contoh potongan program defaults.
#ifndef defaults_h
#define defaults_h
#ifdef DEFAULTS_CNCUMB
// menggunakan motor stepper NEMA 17 dan driver A4988 // 12V power supply.
#define MICROSTEPS_XY 1 // tanpa mode microstepping
#define STEP_REVS_XY 200 // datasheet NEMA 17
#define MM_PER_REV_XY (2.4*16*MM_PER_INCH) // 2.4 pitch, 16 pulley teeth
#define MICROSTEPS_Z 1 // tanpa mode microstepping
#define STEP_REVS_Z 200 // datasheet NEMA 17
#define MM_PER_REV_Z 0,8 // 0,8 mm/rev leadscrew threaded rod
#define DEFAULT_X_STEPS_PER_MM (MICROSTEPS_XY * STEP_REVS_XY / MM_PER_REV_XY)
#define DEFAULT_Y_STEPS_PER_MM
(MICROSTEPS_XY*STEP_REVS_XY/MM_PER_REV_XY)
#define DEFAULT_Z_STEPS_PER_MM
(MICROSTEPS_Z*STEP_REVS_Z/MM_PER_REV_Z)
#define DEFAULT_STEP_PULSE_MICROSECONDS 10
#define DEFAULT_MM_PER_ARC_SEGMENT 0.1
#define DEFAULT_RAPID_FEEDRATE 1000.0 // mm/min
#define DEFAULT_FEEDRATE 250.0
#define DEFAULT_ACCELERATION (15.0*60*60) // 15 mm/min^2
#define DEFAULT_JUNCTION_DEVIATION 0.05 // mm
#define DEFAULT_STEPPING_INVERT_MASK
((1<<Y_DIRECTION_BIT)|(1<<Z_DIRECTION_BIT))
#define DEFAULT_REPORT_INCHES 0 // false
#define DEFAULT_AUTO_START 1 // true
#define DEFAULT_INVERT_ST_ENABLE 0 // false
#define DEFAULT_HARD_LIMIT_ENABLE 0 // false
#define DEFAULT_HOMING_ENABLE 0 // false
#define DEFAULT_HOMING_DIR_MASK 0 // move positive dir
#define DEFAULT_HOMING_RAPID_FEEDRATE 250.0 // mm/min
#define DEFAULT_HOMING_FEEDRATE 25.0 // mm/min
#define DEFAULT_HOMING_DEBOUNCE_DELAY 100 // msec (0-65k)
#define DEFAULT_HOMING_PULLOFF 1.0 // mm
#define DEFAULT_STEPPER_IDLE_LOCK_TIME 255 // msec (0-255)
#define DEFAULT_DECIMAL_PLACES 3
#define DEFAULT_N_ARC_CORRECTION 25
#endif
< gcode.h >
Berisi program penterjemah program G-code / rs274 ke arduino.Kode G yang sering digunakan adalah G0 atau program mengangkat ke posisi tertentu, G1 untuk gerakan menulis dengan garis lurus, G2 untuk melakukan gerakan menulis berbentuk lingkaran searah jarum jam dan G3 kebalikan dari G2. Kode G yang terdaftar dalam header ini adalah G4, G10, G28, G30, G92, G0, G1, G2, G3, G80, G90, G91, G93, G94, G20, G21, G54, G55, G56, G57, G58 dan G59.
Pengaturan RX buffer size dan TX buffer size, serial portwrite dan read.
< settings.h >
Konfigurasi data EEPROM yang berasal dari header defaults.
< planner.h >
Pengaturan kecepatan, percepatan dan perlambatan, kalkulasi perhitungan gerakan motor stepper.
<eeprom.h>
Berisi pengaturan variable yang akan di simpan di EEPROM arduino.
< gbrlmain.h >
Program awal yang akan dijalankan. Pengaturan interrupt, komunikasi serial dan program pengulangan.
< motion_control.h >
Program dasar pada header <gcode> untuk pergerakan motor stepper.
<print.h>
Fungsi pengaturan format output yang akan dikirim via serial ke arduino.
<protocol.h>
Bagian atau unit master serial protokol software GBRL Controller.
< stepper.h >
Driver motor stepper, mengeksekusi pengaturan gerakan yang berasal planner.c untuk mengatur motor stepper.
3.4.2 Konfigurasi Software GBRL Controller
Melalui software GBRL Controller, sistem X, Y, dan Z dapat bergerak sesuai dengan desain yang telah dibuat.Namun sebelumnya prototype mesin CNC memerlukan konfigurasi dan kalibrasi terlebih dahulu menggunakan software Grbl. Konfigurasi dapat dilakukan dengan menggunakan beberapa menu yang tersedia.
Pada Gambar 3.18 terdapat menu yang dapat digunakan untuk menggerakkan sistem X, Y dan Z.
Gambar 3.18 Konfigurasi Sumbu X Y Z
Menu yang ditunjukkan oleh panah pada nomor 1 digunakan untuk menggerakkan sistem Y, panah pada nomor 2 untuk menggerakkan sistem X dan panah pada nomer 3 untuk menggerakkan sistem Z.
maka akan tampil preview desain pada tab visualizer seperti pada Gambar 3.19.
Gambar 3.19 Preview Desain yang Akan Dibuat
Menu lainnya seperti Port Name, digunakan untuk memilih port yang menghubungkan PC dengan Arduino. Sedangkan Begin dan Stop, kedua menu ini digunakan untuk memulai dan menghentikan kerja prototype mesin CNC.