1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Indonesia merupakan negara kepulauan yang sangat luas dan berada pada 6o LU hingga 11oLS serta pada 95oBT hingga 141oBT. Berdasarkan data dari Badan Informasi Geospasial (BIG) pada tahun 2013, panjang garis pantai Indonesia sepanjang 99.093 km (belum termasuk garis pulau dan danau ) dengan jumlah pulau sebanyak 13.466 pulau (by name by address). Konsekuensi dari panjangnya garis pantai tersebut adalah dibutuhkannya stasiun pasang surut yang lebih banyak di sepanjang garis pantai tersebut untuk memberikan gambaran kondisi pasang surut yang benar. Indonesia pada tahun 2013 baru memiliki 113 stasiun pasang surut dari target 400 stasiun dibawah koordinasi Badan Informasi Geospasial(BIG, 2013). Hal ini menyebabkan kebutuhan akan data pasang surut di pantai-pantai di Indonesia belum dapat terakomodasi.
Data pasut sangat penting bagi kegiatan pembangunan dan pengembangan daerah pesisir.Dari data tersebut dapat diketahui informasi muka air laut dan perkiraan air laut tertinggi serta terendah untuk referensi pembangunan dermaga atau pelabuhan. Selain itu, dapat didefinisikan chart datum pada suatu perairan tertentu. Dengan pengembangan teknologi akuisisi data yaitu secara ekstraterestrial menggunakan satelit altimetri, data pasut memegang peranan sebagai koreksi SSH maupun SLA satelit altimetri. Namun karena ketersediaannya yang terbatas, informasi pasang surut pada suatu perairan tertentu belum dapat diketahui.
Salah satu solusi dari keterbatasan data pasang surut dari stasiun pasang surut di sepanjang pantai di Indonesia adalah dengan menggunakan model pasang surut global. Model pasang surut global diantaranya dibentuk menggunakan data satelit altimetri seperti TOPEX/Poseidon, ERS-2, ENVISAT, Jason-1 atau Jason-2 pada periode tertentu menggunakan metode tertentu (Savcenko dan Bosch, 2011). Model pasang surut global diklasifikasikan menjadi tiga kategori, yang pertama adalah model berdasarkan analisis data altimetri seperti model CSR (Center for Space Research) dan GOT (Goddard
Ocean Tide). Kategori kedua adalah model hidrodinamik murni seperti model FES95.2 serta kategori terakhir adalah model dinamis yang diasimilasikan dengan data pasut observasi seperti model TPXO dan FES2004 (Basith, 2012). Namun, ketelitian dari model pasang surut global tergantung pada lokasi perairan (region-dependent) dimana ketelitiannya lebih rendah secara signifikan untuk daerah pesisir daripada di laut dalam (Fok dkk., 2010).
Beberapa model pasang surut global (Global Tide Model) telah diasimilasi dan divalidasi menggunakan data pasang surut perairan tertentu sehingga menghasilkan model pasang surut regional. Model pasang surut ini meningkat ketelitiannya di perairan tersebut dibandingkan model pasang surut global sehingga hanya cocok digunakan pada perairan tersebut. Namun, belum diketahui model pasut yang paling sesuai, khususnya untuk perairan pulau Jawa. Untuk itu, diperlukan identifikasi model pasut global dan regional yang sesuai dengan cara (1) Nilai konstanta harmonik pasang surut suatu perairan dari model pasut memiliki nilai yang tidak jauh berbeda dengan nilai konstanta harmonik pasang surut dari data lapangan (pengukuran pasang surut terestris) (Lyard dkk., 2005), (2) Model pasut digunakan untuk aplikasi tertentu, misalnya koreksi data satelit altimetri dapat meningkatkan ketelitian atau standar deviasi data satelit altimetri (Fok dkk, 2010).
Pada penelitian ini dilakukan evaluasi terhadap Regional Tide ModeldanGlobal Tide Model untuk mengetahui model pasang surut yang paling sesuai dengan wilayah perairan pulau Jawa. Model yang diuji yaitu model pasut regional buatan BIG (Badan Informasi Geospasial) dan model global FES2012 dan TPXO7-Atlas. Pemilihan model tersebut dikarenakan model BIG merupakan asimilasi model TPXO7-Atlas menggunakan data pasang surut perairan Indonesia sedangkan model FES2012 dipilih karena merupakan model terbaru dengan resolusi spasial yang baik dan ukuran grid yang rapat. Semakin kecil perbedaan antara konstanta harmonik pasut model dengan data pengamatan pasut maka makin baik model pasang surut tersebut untuk digunakan pada suatu perairan (Fok dkk., 2010). Selain itu, ketelitian (STD) data satelit altimetri yang
meningkat setelah diberikan koreksi dari model pasut maka semakin baik model tersebut.
I.2. Rumusan Masalah
Saat ini tersedia model pasang surut global serta model pasang surut regional hasil asimilasi dengan data pasang surut terestris sebagai alternatif menyelesaikan keterbatasan data pasang surut yang ada di lapangan. Namun demikian, belum diketahui ketelitian dan kesesuaian model-model tersebut dengan perairan pulau Jawa. Oleh karena itu perlu dilakukan evaluasi model pasut dengan data pengamatan pasut dan satelit altimetri untuk mengetahui model yang paling sesuai di gunakan di perairan pulau Jawa.
I.3. Pertanyaan Penelitian
Berdasarkan masalah yang diidentifikasi pada sub bab I.2 maka peneliti merumuskan beberapa pertanyaan sebagai berikut :
1. Berapakah nilai konstanta harmonik pasang surut pada masing-masing Global Tide Model (FES2012 dan TPXO-7 Atlas), model pasang surut regional buatan BIG serta data stasiun pasang surut pada perairan pulau Jawa?
2. Bagaimanakah urutan model yang memiliki nilai Root Mean Square (RMS), Root Sum of Squares (RSS), Root Sum of Squares of the In-phase and Quadrature (RSSIQ), Discrepancy (D) dengan data tide gauges terkecil hingga terbesar?
3. Bagaimanakah urutan model yang memberikan nilai standar deviasi (STD) SLA data satelit altimetri terkoreksi pasang surut laut data model dari terkecil hingga terbesar?
4. Model pasut apa yang paling sesuai digunakan pada perairan pulau Jawa? I.4. Cakupan Penelitian
Pada penelitian ini dilakukan evaluasi ketelitian model pasang surut global dan regional pada perairan pulau Jawa. Data yang digunakan yaitu data pasang surut terestris pada 4 stasiun pasut di pulau Jawa dan satelit altimetri yang melewati pulau Jawa selama
satu tahun. Model yang dievaluasi yaitu model pasut global FES2012 dan TPXO7-Atlas serta model pasut regional BIG. Evaluasi dilakukan dengan membandingkan nilai amplitudo 4 konstanta utama dari model terhadap konstanta dari pengukuran terestris. Selain itu, nilai konstanta harmonik dari model digunakan untuk koreksi SLA satelit altimetri yang masih mengandung nilai pasut ekuilibrium periode panjang dan sinyal musiman sehingga akan menghasilkan nilai standar deviasi yang lebih baik. Model pasut yang paling sesuai digunakan di perairan pulau Jawa ditunjukkan dengan model yang memiliki nilai perbandingan ketelitian dan standar deviasi yang paling kecil.
I.5. Tujuan Tujuan dilakukannya penelitian ini adalah :
1. Memperoleh nilai konstanta harmonik pasut dari data stasiun pasut dan 3 (tiga) model pasut.
2. Memperoleh nilai perbandingan ketelitian (RMS, RSS, RSSIQ dan D) antara konstanta harmonik model pasut regional dan global terhadap konstanta harmonik data pasut terestris/lokal.
3. Memperoleh nilai perbandingan ketelitian (STD) model pasut regional dan global untuk aplikasi koreksi data satelit altimetri.
4. Memperoleh model pasut yang paling sesuai dengan perairan pulau Jawa. I.6. Manfaat
Manfaat dari penelitian ini yaitu dengan diketahui model pasut yang sesuai dengan perairan pulau Jawa, maka dapat digunakan oleh pihak lain seperti instansi-instansi terkait yang membutuhkan data pasang surut pada perairan pulau Jawa khususnya dan perairan Indonesia lainnya yang jauh dari lokasi stasiun pasang surut. Oleh karena itu, pembangunan dan pekerjaan lain yang memanfaatkan informasi pasut dapat dilakukan.
I.7. Tinjauan Pustaka
Cheng dkk (2010) melakukan validasi terhadap model pasut DTU10 dengan pengukuran stasiun pasut pada wilayah Northwest European Shelf dan Eastern China Sea. Perbandingan dengan model referensi FES2004 dan dengan model pasut global lain
seperti EOT08a dan GOT4.7 menunjukkan konstanta harmonik utama (M2, S2, K1 dan O1) yang lebih baik pada wilayah perairan dangkal.
Carrere dkk (2012) mengadakan penelitian terhadap model pasut global FES2012. Keakurasian model ini ditingkatkan dengan menggunakan data satelit altimetri selama 20 tahun namun masih memiliki errorpada perairan dangkal dan lintang tinggi. Model ini masih harus meningkatkan koreksi pasang surut untuk semua misi satelit altimetri dan misi SWOT pada tahun 2020. Nilai konstanta harmonik M2 lebih baik daripada model DTU10 dan GOT4.8, khususnya pada wilayah pesisir dan shelf. Sedangkan nilai K1 lebih baik pada wilayah pesisir/shelf daripada laut dalam.
European Space Agency (ESA) (2014) membandingkan model GOT4.8 dengan FES2004 menggunakan data residu along-track 7,5 tahun dan data satelit Jason-2 dan ENVISAT. Hasil menunjukkan bahwa model GOT4.8 mengurangi residu varian lebih besar daripada FES2004 di perairan dangkal. Pengurangan varian tersebut lebih besar dari 25 cm2.
Fok dkk (2010) melakukan penelitian dengan judul “evaluation of ocean tide models used for Jason-2 Altimetry correction”. Pada penelitian ini, para peneliti memperkirakan keakurasian koreksi pasut pada satelit altimetri Jason-2 menggunakan model pasut FES2004 dan GOT00.2 dengan fokus pada wilayah pesisir tertentu. Model pasut lain yang digunakan untuk memvalidasi di wilayah pesisir adalah EOT08a, GOT4.7, NAO.99b, OSU06, TPXO6.2, TPXO7.1 dan TPX07.1. Metode yang digunakan adalah dengan analisis data referensi di lapangan dan analisis variance-reduction satelit altimetri. Wilayah perairan yang diteliti adalah pesisir pasifik barat laut, atlantik barat laut, Gulf of Mexico, Patagonia Shelf, Cina Tenggara, Australia Selatan dan Afrika Selatan. Hasil penelitian ini menunjukkan keakurasiannya tergantung pada wilayah perairan tertentu pada tingkat RMS 2-3 cm.
Shum dkk (2012) melakukan evaluasi terhadap model pasang surut. Penelitian ini menunjukkan perkiraan akurasi global dan regional menggunakan data stasiun pasut dan data satelit altimetri. Stasiun pasut yang digunakan adalah stasiun pesisir dan pelagic. Selain itu juga menggunakan database stasiun BODC acclaim, DART, gloup shelf,
rosame, SW 179, sonel dan gloup deep. Satelit altimetri yang digunakan adalah TOPEX/Poseidon, GFO, Envisat, Jason-1 dan Jason-2. Wilayah yang diteliti adalah Gulf Mexico dan Northwest Atlantic, Patagonia Shelf, Southeast Australia, Indonesia Sea, Northeast Pasific dan Japanese Sea. Penelitian ini menunjukkan bahwa semua model pasut ketelitiannya bergantung pada wilayah perairan.
Umam (2013) melakukan penelitian dengan melakukan evaluasi data hasil prediksi elevasi dan ekstraksi konstanta pasut. Penelitian ini menggunakan model pasut TPXO7.1 dan mengolahnya menggunakan perangkat lunak TMD. Hasil dari penelitian ini adalah perbandingan konstanta pasut hasil prediksi elevasi dan ekstraksi konstanta pasut dalam TMD menunjukkan nilai RMSE amplitudo dan beda fase paling kecil dimiliki oleh komponen K1. Sedangkan untuk nilai RMSE amplitudo terbesar adalah komponen S2 serta RMSE beda fase terbesar adalah komponen N2. Nilai rata-rata RMSE amplitudo dan beda fase berturut-turut adalah sebesar 3,49336 dan 87,24757.
Pada penelitian ini dilakukan evaluasi terhadap tiga buah model pasang surut yaitu model pasang surut global (FES2012 dan TPXO7-Atlas) serta model pasang surut regional yaitu model pasut BIG. Metode evaluasi model menggunakan metode perbandingan nilai konstanta harmonik data model dengan konstanta harmonik dari data pengamatan pasut di pulau Jawa yaitu stasiun Kolinlamil, Pelabuhan Ratu, Surabaya dan Sadeng. Metode evaluasi lain yang digunakan adalah identifikasi nilai standar deviasi pada SLA (Sea Level Anomaly) dari data satelit altimetri Jason-2 yang telah diberi koreksi pasut laut dari model. Berdasarkan hasil studi pustaka, belum ditemukan penelitian yang serupa untuk melakukan evaluasi model pasang surut. Pada penelitian ini difokuskan untuk memperoleh model pasang surut yang cocok digunakan pada perairan pulau Jawa.
I.8. Landasan Teori
I.8.1. Teori Pasang Surut Laut
Pasang surut adalah fenomena naik dan turunnya muka air laut secara periodik yang disebabkan karena pergerakan bumi, bulan, matahari dan benda astronomi lainnya
serta gaya sentrifugal sebagai gaya penyeimbang yang menyebabkan perpindahan massa air laut seluruhnya dari permukaan hingga dasar laut (Donkers, 1964).
Terdapat beberapa teori mengenai pasang surut air laut seperti yang dikemukakan oleh Sir Isaac Newton (1642-1727) mengenai teori pasut setimbang (Equilibrium Tides). Teori ini mengasumsikan bumi berbentuk bola sempurna yang diselimuti air dengan kedalaman homogen. Bumi dan air yang menyelimutinya dianggap dalam keadaan diam (bumi ideal) sampai terdapat gaya yang mempengaruhinya. Namun pada kenyataannya, bumi tidak berada pada keadaan setimbang karena tidak seluruh permukaan bumi diselimuti oleh air namun juga terdapat daratan pada bumi. Selain itu, dasar laut memiliki topografi dengan kedalaman yang beragam (tidak homogen). Adanya gesekan (Zahran dkk., 2006) antara massa air laut dengan dasar laut atau antar massa air laut itu sendiri juga mempengaruhi kondisi pasang surut setimbang.
I.8.2. Teori Harmonik Pasang Surut
Matahari dan bulan merupakan dua benda astronomi utama yang gaya tariknya terhadap bumi mempengaruhi pasang surut yang terjadi di bumi. Benda astronomi lain kecil pengaruhnya sehingga diabaikan karena jaraknya yang terlalu jauh dari bumi atau karena ukurannya yang kecil (Donkers, 1964). Meskipun massa matahari lebih besar dibanding massa bulan, gaya pembangkit pasang surut karena gaya tarik bulan lebih besar pengaruhnya.
Teori pasut setimbang yang pertama dikemukakan oleh Laplace kemudian dikembangkan oleh beberapa peneliti seperti Darwin, Doodson dan Franco. Pada pengembangannya, Darwin menghasilkan beberapa konstanta harmonik seperti Mf, O1, K1, OO1, M2, K2, P1, K1, Q1, S2, K2 dan Ssa. Sedangkan Doodson menetapkan bilangan Doodson untuk membeda-bedakan jenis pasut. Bilangan Doodson ini menetapkan nilai 0 (nol) untuk komponen periode panjang, 1 (satu) untuk komponen diurnal dan 2 (dua) untuk komponen semidiurnal. Pengembangan teori harmonik pasut oleh Franco menghasilkan komponen periode panjang, diurnal dan semidiurnal (Basith, 2014).
I.8.3. Konstanta Harmonik Pasang Surut
Gerakan pembangkit pasut dapat direpresentasikan dalam bentuk kurva kosinus. Sumbu horizontal merepresentasikan waktu sedangkan sumbu vertikal merepresentasikan besarnya gaya pembangkit pasut. Puncak kurva menandakan waktu maksimal saat gaya membangkitkan pasut sedangkan sebaliknya, lembah kurva menandakan waktu minimal. Masing-masing gerakan pembangkit pasut tersebut direpresentasikan menjadi kurva kosinus harmonik sederhana yang dikenal sebagai komponen pasut, konstanta pasut dan konstanta harmonik.
Konstituen pasut disebut sebagai konstanta semidiurnal utama matahari (Principal Solar semidiurnal constituent) yang disimbolkan S2 sedangkan konstanta semidiurnal
utama bulan (Principal Lunar semidiurnal constituent) disimbolkan M2. Angka dua
menandakan bahwa konstanta tersebut mengalami dua siklus sehingga konstanta S2 dan
M2 merupakan konstanta semidiurnal. Periode S2 adalah 12,00 jam matahari sedangkan
periode M2 adalah 12,42 jam matahari. Dalam fungsi kecepatan n, S2 berkecepatan n =
360˚/12,00 = 30˚/jam sedangkan untuk M2 n = 360˚/12,42 = 28,984˚/jam.
K1 sebagai Luni-solar Declinational diurnal constituent dan O1 sebagai Principal
Lunar Declinational diurnal constituent merepresentasikan siklus deklinasi maksimal ke deklinasi maksimal dari bulan yang terjadi setiap 27.3216 hari (bulan tropikal) atau 655.72 jam matahari. Deklinasi utara ke selatan memiliki kecepatan 1.098˚/jam sehingga :
Kecepatan K1 = (28,984˚ + 1,098˚) = 15,041˚/jam
Kecepatan O1 = (28,984˚ - 1,098˚) = 13,943˚/jam
Principal Solar Declinational diurnal constituent atau P1 dan K1 sebagai
Luni-solar Declinational diurnal constituent merepresentasikan siklus deklinasi maksimal ke deklinasi maksimal dari matahari. Siklus ini memiliki waktu 4382.91 jam dari utara ke selatan (juga dari selatan ke utara) dengan kecepatan 0,082˚/jam yang mempengaruhi nilai S2 sehingga :
Kecepatan K1 = (30,000˚ + 0,082˚)/2 = 15,041˚/jam
Kecepatan P1 = (30,000˚ - 0,082˚)/2 = 14,959˚/jam
Tipe pasang surut dapat diketahui dari bilangan Formzahl dengan rumus (Ilahude, 1999) :
………..(I.1)
dimana F adalah bilangan Formzahl, AK1 adalah amplitudo konstanta K1, AO1 adalah
amplitudo konstanta O1, AM2 adalah amplitudo konstanta M2 serta AS2 adalah
amplitudo konstanta S2. Klasifikasi tipe pasang surut berdasarkan nilai F yaitu :
a. 0 < F 0,25 : Tipe pasang surut harian ganda
b. 0,25 < F 1,50 : Tipe pasut campuran condong harian ganda c. 1,50 < F 3,00 : Tipe pasut campuran condong harian tunggal d. F > 3,0 : Tipe pasut harian tunggal
I.8.4. Analisis Harmonik Pasut dengan Metode Least-Square Adjustment
Analisis harmonik pasut merupakan suatu metode untuk mengetahui sifat dan karakter pasut pada suatu perairan tertentu menggunakan hasil pengamatan pasut di perairan tersebut selama kurun waktu tertentu. Nilai konstanta harmonik dihitung dalam analisis harmonik ini yaitu nilai amplitudo dan beda fase dari unsur-unsur pembentuk pasut dengan metode tertentu (Ali dkk., 1994) salah satunya yaitu metode hitung kuadrat terkecil. Prinsip metode ini adalah meminimalkan perbedaan sinyal komposit dan sinyal ukuran.
Persamaan analisis harmonik dengan kuadrat terkecil ditunjukkan pada persamaan I.2.
( ) ( ) ∑ ( ) ……….………..(I.2) dengan h(t) adalah tinggi muka air laut yang merupakan fungsi dari waktu, v(t) adalah residu, hm adalah tinggi muka air rerata, Ai adalah amplitudo komponen ke-1, i yaitu
kecepatan sudut komponen ke-i serta gi yaitu beda fase komponen ke-i. Jika persamaan
I.2 diuraikan dan dimisalkan :
maka persamaannya menjadi :
( ) ( ) ∑ ∑ ……….………..(I.3)
dimana Ar dan Br adalah konstanta harmonik ke-i, k adalah komponen pasut dan tn
adalah waktu pengamatan tiap jam.
Besarnya tinggi muka air rerata hasil hitungan persamaan I.3 mendekati elevasi pasut pengamatan fungsi waktu jika memenuhi syarat hukum kuadrat terkecil yaitu jumlah kuadrat residu minimum. Syarat ini kemudian diturunkan terhadap Ar dan Br. Berdasarkan estimasi kuadrat terkecil maka penyelesaian analisis harmonik metode kuadrat terkecil dapat diuraikan sebagai berikut :
1. Persamaan observasi tinggi muka laut L=AX 2. Persamaan koreksi V=AX – L, sehingga
( ) ∑ ∑ ( ) ……….…..(I.4) Amplitudo dan fase komponen pasut laut ditentukan dengan persamaan 1.5 dan I.6.
√ ………..……….…………(I.5)
……….…………..(I.6)
Desain matriks pengamatan pasut adalah sebagai berikut :
t t t t t t t t t t t t t t t A n n n n k n k 1 k 2 1 1 k 1 1 1 k 1 2 1 1 1 k 1 1 1 k 1 2 1 1 s i n s i n cos s i n cos 1 s i n s i n cos s i n cos 1 s i n s i n cos s i n cos 1 1 n h h L ) ( ) (A PA 1 A PL X T T
k k k B B A A h X 1 1 0 1
I.8.5. Konsep Satelit Altimetri
Satelit altimetri yang diperkenalkan pertama kali pada 1970-an membawa kemajuan pada ketersediaan data pasang surut. Satelit altimetri dengan kemampuannya mampu mengobservasi topografi ketinggian permukaan laut secara global dengan sampling temporal mingguan, resolusi cross-track 100 km dan akurasi yang lebih baik. Pada tahun 1991, diluncurkan satelit ERS-1 disusul peluncuran satelit altimetri TOPEX/Poseidon. TOPEX/Poseidon ini memiliki cakupan global dengan keakurasian yang belum pernah ada sebelumnya, serta memiliki sampling orbital yang optimal yang mengawali ilmu pasang surut dan satelit oseanografi menggunakan satelit altimetri (Fudkk., 1994). Setelah saat itu, satelit altimetri lain diluncurkan seperti ER2-2, GFO, Envisat, Jason-1, Jason-2 untuk berbagai keperluan geofisika dan oseanografi seperti perubahan iklim, kenaikan muka air laut, perpindahan panas, sirkulasi laut dan lain sebagainya (Fok dkk., 2010).
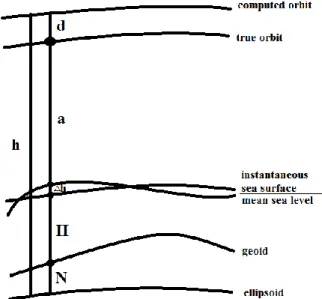
Satelit altimetri mengukur jarak vertikal antara satelit ke permukaan air laut (range). Ketinggian air laut atau sea surface height (SSH) dari elipsoid referensi diperoleh dari selisih antara tinggi satelit dari elipsoid referensi (altitude) dengan jarak vertikal. Pada rumus I.7, h adalah jarak vertikal satelit dari elipsoid referensi global diperoleh dari (Seeber,2003) :
dengan H adalah jarak vertikal MSS (Mean Sea Surface) terhadap geoid referensi, N adalah undulasi geoid dan a adalah ketinggian orbit sebenarnya dari MSL. Komponen dalam persamaan I.2 diatas dapat disajikan pada Gambar I. 1.
Gambar I.1. Konsep dasar satelit altimetri (Seeber, 2003) I.8.6. Koreksi pada Pengukuran Satelit Altimetri
Kesalahan yang memerlukan koreksi pada pengukuran satelit altimetri dibagi menjadi lima bagian (Moody dkk., 1996), yaitu kesalahan orbit, kesalahan satelit, kesalahan media transmisi, kesalahan media pantul dan bias geofisika. Perlu diterapkan koreksi pada bias geofisika untuk memperoleh nilai SSH yang akurat. Koreksi yang diterapkan antara lain :
I.8.6.1. Koreksi instrumen
Biasanya, pengaruh kesalahan instrumen ini dapat ditentukan dengan melakukan kalibrasi terhadap satelit altimetri dengam melakukan survey teliti di wilayah tertentu. Kesalahan ini mencakup kesalahan Doppler-shift, bias antena, kesalahan nadir dan beberapa kesalahan bias internal. Kesalahan Doppler-shiftakan mempengaruhi jarak satelit altimetri ke permukaan laut dikarenakan adanya keterlambatan waktu
pengukuran. Hal ini disebabkan karena kecepatan radial satelit sehingga frekuensi Doppler bergeser.
Offset pusat massa diperhitungkan untuk menentukan perbedaan pusat fase pada antena satelit altimetri tempat menerima pulsa yang dipancarkan dan yang diterima kembali dari permukaan laut. Selain itu, perhitungan orbit satelit juga didasarkan pada pusat massa satelit ini. Pengukuran pada satelit altimetri dilakukan pada antenna satelit altimetri yang letaknya tidak tepat berada di pusat massa satelit. Jarak antara pusat massa satelit dengan antenna satelit disebut dengan bias antenna yang ditetapkan sebelum satelit diluncurkan.
Penyimpangan pancaran sinyal arah vertikal karena garis proyeksi titik nadir satelit ke permukaan bumi tidak selalu segaris dengan proyeksi tinggi satelit menyebabkan kesalahan nadir. Hal ini mengakibatkan hasil pengukuran jarak yang diperoleh adalah jarak miring terhadap titik offset dari nadir dan tidak persis pada posisi yang terhitung.
I.8.6.2. Koreksi media transmisi
Koreksi media transmisi diterapkan dikarenakan pulsa menjalar melewati lapisan atmosfer yaitu toposfer dan ionosfer. Koreksi ini meliputi koreksi ionosfer, troposfer kering dan troposfer basah. Koreksi ionosfer bergantung pada frekuensi gelombang altimetri dan tingkat ionisasi pada lapisan atmosfer. Nilai ionosfer ini diberikan oleh instrumen yang terpasang pada satelit. Pada satelit bekerja dua buah sensor yang bekerja secara simultan untuk mereduksi bias karena lapisan atmosfer.
Koreksi troposfer kering disebabkan karena komponen udara kering pada atmosfer tidak dapat diukur langsung oleh sensor. Koreksi ini menggunakan model yang sudah ada seperti model Saastamoinen tahun 1972. Koreksi toposfer basah karena kadar uap air pada toposfer dapat dihitung dengan sensor microwave radiometer.
I.8.6.3. Koreksi Sea State Bias (SSB)
Koreksi media pantul disebabkan karena tiga dampak yang saling berhubungan yaitu tracker bias, electromagnetic bias dan skewness bias. Bias elektromagnetik yaitu perbedaan antara muka laut rerata dengan muka pantulan rerata dikarenakan tingkat kekasaran muka laut yang tidak homogen. Skewness bias adalah beda tinggi antara muka pantulan rata-rata dengan muka pantulan rata-rata yang diukur oleh satellite tracker. Bias ini disebabkan oleh distribusi tinggi muka laut yang tidak normal.
I.8.6.4. Koreksi geofisik
Koreksi geofisik terdiri dari pasang surut laut (ocean tide), pasut pembebanan (loading tide), pasut bumi padat (solid earth tide), pasut kutub (pole tide) dan pasut atmosfer. Pasut laut disebabkan karena adanya gaya tarik menarik matahari dan bulan terhadap bumi.pasut laut memberikan pengaruh yang besar terhadap dinamika perubahan muka laut. Terdapat model pasang surut laut yang tersedia saat ini seperti model global FES (Finite Element Solution), GOT (Goddard Ocean Tide) dan sebagainya.
Perubahan naik turunnya air permukaan bumi menyebabkan lapisan kerak bumi juga mengalami pembebanan. Jika air pasang maka kerak bumi akan mengalami pembebanan yang besar dan sebaliknya. Pasang surut tersebut disebut dengan pasang surut pembebanan atau loading tide yang besarnya hanya 7% dari pasut laut (Schwiderski, 1980). Pasut bumi padat disebabkan karena gaya gravitasi benda langit terhadap bumi padat sedangkan pasut kutub disebabkan karena osilasi sumbu rotasi bumi terhadap kerangka inersial periode 12 hingga 14 bulan.
Diatas permukaan laut terdapat atmosfer yang memiliki tekanan meningkat maupun menurun. Hal ini berpengaruh pada permukaan laut dimana setiap tekanan atmosfer bertambah 1 mbar maka akan menurunkan permukaan laut setinggi 1 cm. Koreksi ini disebut inverse barometric yang dihitung dari koreksi troposfer kering (Benada, 1996).
Dengan memperhitungkan semua koreksi tersebut maka akan diperoleh tinggi permukaan laut (SSH) yang aktual. Persamaan I.8 menunjukkan rumus menentukan SSH dengan memperhitungkan berbagai koreksi.
………..……… (I.8)
dimana hinstr adalah koreksi instrumen, hiono adalah koreksi ionosfer, hdry adalah koreksi
troposfer kering, hwet adalah koreksi troposfer basah, hssb adalah koreksi sea state bias,
hoc adalah koreksi pasut laut, hol adalah koreksi pasut pembebanan, hsol adalah koreksi
pasut bumi padat, hpole adalah koreksi pasut kutub, hib adalah koreksi inverse barometric
dan e adalah noise dalam pengukuran. I.8.7. Satelit Altimetri Jason-2
Misi satelit Jason-2 pertama kali diluncurkan pada 20 Juni 2008 oleh NOAA (National Oceanic and Atmospheric Administration) Amerika, NASA (National Aeronautics and Space Administration) Amerika, CNES (Centre National d’Etudes Spatiales) Prancis dan EUMETSAT (the European Organization for the Exploitation of Meteorological Satellites). Satelit Jason-2 disebut juga dengan OSTM (the Ocean Surface Topography Mission) yang memiliki misi utama untuk memonitor tren kenaikan kenaikan muka laut sebagai salah satu indikator perubahan iklim global. Jason-2 memecahkan rekor decadal global untuk pertama kalinya untuk memahami peran penting laut dalam permasalahan perubahan iklim global. Oleh karena itu, data misi satelit ini memungkinkan pemantauan perubahan sea level rise secara kontinyu (Dumont dkk., 2011).
Pengukuran SSH (sea surface height) menggunakan misi satelit ini berada pada ketelitian 3,4 cm atau lebih baik (pada 1 Hz). Koreksi pada alat dan lingkungan diterapkan untuk mencapai ketelitian yang diinginkan. Selain itu, suatu sistem pengukuran diterapkan berdasarkan dampak yang diantisipasi dari perbaikan pengolahan offline ground. Perbaikan ini diharapkan mampu mengurangi kesalahan sea surface
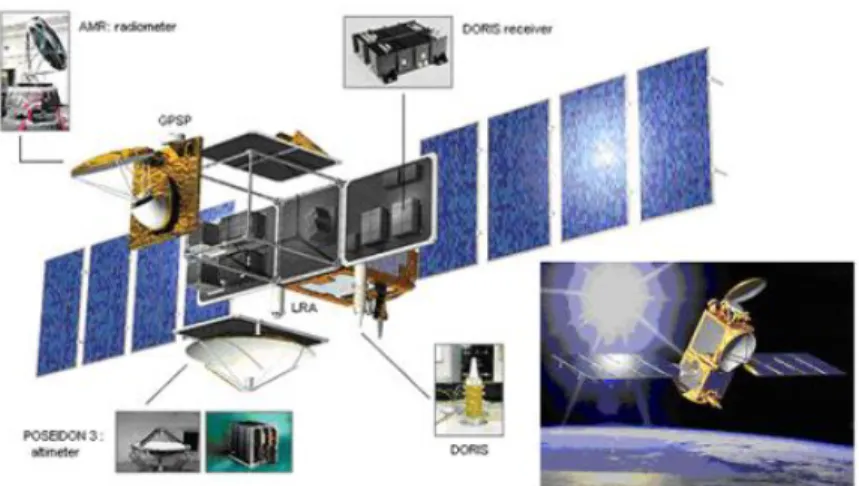
height (SSH) hingga RMS 2,5 cm. Komponen dari OSTM/Jason-2 ini antara lain (Dumont dkk., 2011) :
a. Altimeter (Poseidon-3) sebagai instrumen utama;
b. Advanced Microwave Radiometer (AMR) untuk mengoreksi pengukuran altimeter untuk keterlambatan range atmosfer dikarenakan kelembaban air; c. Sistem radio positioning DORIS, untuk penentuan kepresisian orbit
menggunakan stasiun referensi di bumi;
d. Laser Reflection Array, untuk kalibrasi sistem penentuan orbit;
e. GPS receiver presisi (GPSP), untuk menyediakan data posisi tambahan bagi DORIS untuk mendukung fungsi POD dan meningkatkan pemodelan medan magnetik;
f. CARMEN-2 Radiation Detectors, untuk mengukur partikel high-energy yang dapat mengganggu osilator ultra-stable pada DORIS;
g. Light Particle Telescope (LPT) yang berfungsi menyediakan JAXA bagi pengukuran radiasi yang diterima DORIS;
h. Detektor Time Transfer by Laser Link (T2L2), untuk memonitor jam pada DORIS.
Gambar I.2 Komponen utama satelit Jason-2 (Dumont dkk.,2011) Karakteristik satelit Jason-2 disebutkan dalam Tabel I.1 (Seeber, 2003).
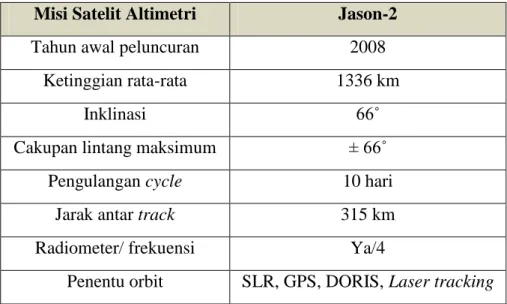
Tabel I.1.Karakteristik satelit altimetri Jason-2 (Seeber, 2003)
Misi Satelit Altimetri Jason-2
Tahun awal peluncuran 2008
Ketinggian rata-rata 1336 km
Inklinasi 66˚
Cakupan lintang maksimum ± 66˚
Pengulangan cycle 10 hari
Jarak antar track 315 km
Radiometer/ frekuensi Ya/4
Penentu orbit SLR, GPS, DORIS, Laser tracking
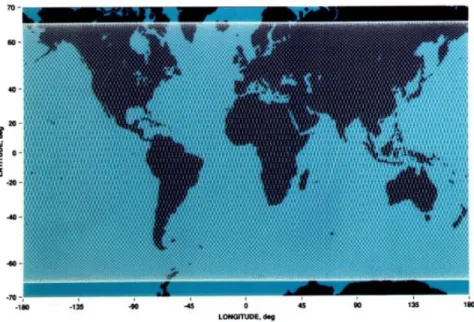
OSTM/Jason-2 memiliki ascending passdari lintang -66.15 derajat hingga +66.15 derajat serta descending pass mulai dari lintang -66.15 derajat hingga +66.15 derajat. Track atau pass diberi penomoran dari 1 hingga 254 sesuai dengan jumlah track Jason-2. Ascending pass diberi nilai ganjil sedangkan descending pass diberi nomor genap. Masing-masing track akan kembali pada titik pengamatan yang sama dengan ketelitian ±1 km dalam waktu 9,9 hari (Dumont dkk., 2011). Gambar I.3 menggambarkan track satelit altimeter Jason-2 di atas peta dunia.
Gambar I.3. Track satelit altimeter Jason-2 dengan resolusi spasial 10 hari (Dumont dkk., 2011)
I.8.8. Geophysical Data Record (GDR) Jason-2
Satelit altimeter Jason-2 menghasilkan 3 (tiga) jenis kelompok produk yaitu OGDR (Operational Geophysical Data Records), IGDR (Interim Geophysical Data Records) dan Final GDR (Geophysical Data Records). Final GDR merupakan produk akhir yang telah melewati 3 (tiga) tahap pemrosesan data, yaitu (Dumont dkk., 2011) :
a. Validasi data telemetri
b. Validasi data karena kesalahan sensor dan koreksi geofisik c. Validasi menggunakan orbit presisi
Produk GDR tersedia tiap cycle yang didistribusikan melalui halaman web CNES atau NOAA.Satu cycle satelit altimeter Jason-2 berisi data pengamatan 10 hari. Satelit akan mengamat pada suatu titik dan akan kembali mengamat pada titik yang sama dalam waktu 10 hari dengan ketelitian posisi kurang lebih 1 kilometer (Dumont dkk., 2011).
Masing-masing dari ketiga kelompok produk data satelit altimeter Jason-2 memiliki tiga tipe file dalam format NetCDF (*.nc), termasuk kelompok data final GDR itu sendiri, yaitu :
a. GDR-SSHA. Tipe file ini berisi kumpulan data pengamatan menggunakan frekuensi sensor 1 Hz terreduksi. Data yang dimuat adalah data Sea Surface Height (SSH).
b. GDR. Data ini disebut juga dengan native GDR, berisi data pengamatan menggunakan frekuensi sensor 1 Hz dan 20 Hz.
c. S-GDR. S-GDR berisi data penuh radar-echo waveform. Wavefrom merupakan data yang berisi kekuatan radar yang dipantulkan permukaan laut dan diterima kembali oleh sensor pada satelit altimeter.
Kelompok data GDR memiliki keakurasian yang paling baik. Sedangkan ukuran dan kompleksitas tipe file GDR meningkat dari GDR-SSHA, GDR hingga S-GDR. Kelompok data GDR satelit altimeter Jason-2 memiliki penamaan sesuai konvensi sebagai berikut : GDR-SSHA: JA2_GP<R>_2P<v>P<ccc>_<ppp>_<yyyymmdd_hhnnss>_<yyyymmdd_hhnns s>.nc GDR: JA2_GP<N>_2P<v>P<ccc>_<ppp>_<yyyymmdd_hhnnss>_<yyyymmdd_hhnns s>.nc S-GDR: JA2_GP<S>_2P<v>P<ccc>_<ppp>_<yyyymmdd_hhnnss>_<yyyymmdd_hhnns s>.nc dimana,
<v> : versi produk <ccc> : nomor cycle
<ppp> : nomor pass atau track
<yyyymmdd_hhnnss> : tanggal awal dan akhir pengamatan pada satu cycle.
Data utama GDR adalah range atau jarak satelit altimetri ke permukaan target. GDR menyediakan range yang diukur pada Ku band dan C band. Range harus dikoreksi dikarenakan keterlambatan sinyal pada atmosfer ataupun dikarenakan pemantulan sinyal di permukaan laut. Persamaan I.9 menunjukkan koreksi yang harus diberikan kepada range (Dumont dkk., 2011).
Jarak terkoreksi = jarak – koreksi toposfer basah + koreksi troposfer kering + koreksi ionosfer + koreksi sea state bias ………...………(I.9) I.8.9. Sea Surface Height (SSH) dan Sea Level Anomaly (SLA)
SSH merupakan ketinggian permukaan laut diatas elipsoid referensi. Nilai SSH dapat dihitung dengan mengurangkan nilai altitude atau ketinggian terbang satelit dari elipsoid referensi terhadap jarak terkoreksi. SLA didefinisikan sebagai SSH yang dikurangkan terhadap nilai MSS (Mean Sea Surface) dan efek geofisik seperti pasang surut dan inverse barometric. Persamaan I.10 merupakan expression pada perangkat lunak BRAT yang menunjukkan efek geofisik yang perlu disertakan untuk memperoleh nilai SLA.
SLA = alt – range – dry_topocorr–(hf_fluctuationscorr + inv_barcorr) –
solid_earth_tidecorr – pole_tidecorr – sea_state_biascorr – ionocorr – wet_tropocorr –
MSS……….……….. (I.10) Keterangan dari persamaan I.5 adalah :
alt : Altitude
dry_topocorr : Koreksi troposfer kering
hf_fluctuationscorr : Fluktuasi topografi permukaan laut
inv_barcorr : Koreksi inverse barometric
solid_earth_tidecorr : Koreksi pasang surut bumi padat
pole_tidecorr : Koreksi pasang surut kutub
sea_state_biascorr : Koreksi sea state bias
ionocorr : Koreksi ionosfer
wet_tropocorr : Koreksi troposfer basah
MSS : Mean Sea Surface
I.8.10. Koreksi Pasang Surut pada Satelit Altimeter Jason-2
Pasang surut berpengaruh secara signifikan terhadap Sea Surface Height (SSH) observasi (Le Provost, 2001). Terdapat berbagai macam efek pasang surut yang berpengaruh, yaitu pasang surut laut, pasang surut gaya berat (load tide), pasang surut bumi padat serta pasang surut kutub. GDR Jason-2 menyediakan dua jenis nilai pasang surut geosentris, yaitu ocean_tide_sol1 dan ocean_tide_sol2 sebagai salah satu koreksi geofisik. Keduanya dihitung menggunakan jumlah nilai pasang surut laut tipe diurnal dan semidiurnal serta nilai loading yang diprediksi menggunakan model GOT4.8 dan FES2004.
Koreksi pasang surut ini digunakan untuk mengurangkan nilai Sea Surface Height (SSH) sehingga menghasilkan nilai Sea Level Anomaly (SLA) (Dumont dkk., 2011). Tide solution 1 dihasilkan menggunakan model GOT00.2 (GOT4.8) dan nilai pasang surut laut S1 sedangkan nilai pasang surut pembebanan S1 diabaikan. Pada tide solution 2 menggunakan nilai dari model FES2004 serta nilai pasang surut laut S1 dan M4. Nilai pasang surut pembebanan S1 dan M4 diabaikan pada solusi tersebut.
I.8.11. Model Pasang Surut
Dilatarbelakangi karena tidak memadainya data pasut konvensional untuk perairan tertentu, model pasang surut global menjadi salah satu solusinya. Global tide model memberikan pemodelan pasang surut di seluruh laut di permukaan bumi, baik di lautan luas maupun di lautan pesisir yang dibangun menggunakan data satelit altimetri periode tertentu dan beberapa stasiun pasut di lapangan. Beberapa model pasut yang dikenal dengan berbagai versi adalah TPXO, FES (Finite Element Solution), GOT, DTU, CSR, EOT dan lain-lain. Keakurasian model pasut global ini bergantung pada wilayah perairan tertentu (region-dependent) dimana keakurasiannya memburuk untuk daerah pesisir atau perairan dangkal (Fu, dkk, 2010).
Model pasut dapat diklasifikasikan menjadi tiga kategori (Zahran dkk., 2006) , yaitu:
a. Model berdasarkan analisis data altimetri untuk mengekstrak berbagai sinyal pasut. Model ini pertama kali diikuti oleh satelit altimetri Geosat yang kemudian dilanjutkan oleh TOPEX/Poseidon. Produk dari model ini adalah model CSR (Center for Space Research) dan GOT (Goddard Ocean Tide).
b. Model hidrodinamik murni yang dihitung tanpa asimilasi data. Model yang termasuk kategori ini adalah Finite Element Solution (FES 95.2) dan ICOM. c. Model dinamis dengan asimilasi dari data pasut observasi (altimeter, stasiun
pasut pesisir dan pelagic). Model NAO, ORI, FES02 dan FES2004 termasuk kategori model ini.
I.8.11.1. Finite Element Solution 2012 (FES2012)
Model pasang surut global FES (Finite Element Solution) 2012 merupakan salah satu model hidrodinamik sebagai pengembangan dari versi sebelumnya yaitu FES2004.FES2012 meningkatkan resolusi pada perairan global menggunakan data pengamatan altimeter selama 20 tahun. Time series selama 20 tahun ini dianggap cukup untuk menganalisa perairan dalam dengan lebih baik. Dari versi sebelumnya, FES2012
mengalami peningkatan kualitas pada data batimetri dan garis pesisir (Carrere dkk., 2012).
FES2012 dibangun berdasarkan resolusi dari persamaan barotropik pasang surut (model T-UGO) pada konfigurasi spektral. Sebanyak 32 konstanta pasang surut (amplitudo dan fase) didistribusikan pada ukuran grid 1/16˚ x 1/16˚. Sebanyak kurang lebih 1,5 juta titik node digunakan untuk meningkatkan keakurasian pada batimetri dua kali lebih baik dibanding pendahulunya, FES2004. Keakurasian ini ditingkatkan kembali dengan asimilasi data satelit altimeter jangka panjang (Topex/Poseidon, 1, Jason-2, ERS-1, ERS-2 dan ENVISAT) menggunakan metode asimilasi.FES2012 lebih baik dibandingkan model FES2004 dan GOT4.8 khususnya pada area pesisir dan laut dangkal.
I.8.11.2. TPXO7-Atlas
Wilayah pesisir dengan struktur topografi yang kompleks menyebabkan kualitas penyelesaian global dan regional dibatasi oleh resolusinya. Dengan penyelesaian menggunakan model Atlas dapat diperoleh resolusi yang lebih baik. Pada model Atlas berhubungan dengan model dasar pada perairan dalam dan pada model lokal yang diinterpolasi kepada grid yang lebih sempit pada wilayah pesisir.
TPXO7-Atlas menggabungkan semua model lokal kecuali laut Mediterania ditambah dengan model Laut Baltik. Model Atlas akan sesuai dengan stasiun pasang surut pesisir secara signifikan daripada model dasar namun masih lebih buruk jika dibandingkan model lokal dikarenakan resolusi yang lebih kecil.
Selain model pasut global, beberapa model pasang surut regional diciptakan untuk suatu wilyah perairan tertentu. Ketelitiannya meningkat di wilayah perairan tersebut jika dibandingkan dengan model pasut global. Model pasut regional diperoleh dari beberapa data altimetri dan dataset lain seperti data pengamatan pada stasiun pasang surut laut yang diasimilasikan.
I.8.12. Metode Evaluasi Model Pasang Surut
Salah satu metode evaluasi model pasut laut yaitu analisis data titik kontrol di lapangan (coastal and pelagic tidal constants). Metode ini melibatkan interpolasi bilinier pada model grid konstanta pasut untuk mengetahui posisi catatan pasut tersebut tersedia untuk kemudian dievaluasi antar keduanya. Metode ini menggunakan perhitungan deviasi RMS dari konstanta harmonik untuk setiap konstituen j yang diturunkan dari model pasut dibandingkan data referensi di lapangan yang didefinisikan sebagai (Fok, dkk, 2010) :
RMSj = √ ∑ *, ( ) – ( )- , ( ) – ( )- + ...……(I.11)
dengan , , dan merupakan amplitude in-phase and quadrature pasut dengan titik kontrol di lapangan untuk setiap stasiun i dan konstituen j serta N adalah jumlah lokasi dimana amplitude in-phase and quadrature dihitung. Selanjutnya, RSS (Root Sum of Squares) merupakan jumlah efek dari n konstituen pasut untuk setiap model dirumuskan :
RSS = √∑ ……….………(I.12)
Root Sum of Squares of the In-Phase and Quadrature (RSSIQ) merupakan formula untuk memperkirakan seluruh kesalahan model pasut dengan data kontrol di lapangan dari RSS yang dirumuskan :
RSSIQ = √ ∑ ∑ *( ( )) ( ( )) + ……….………(I.13)
Discrepancy (D) dalam prosentase dirumuskan :
D = x 100% ………...……….…….(I.14)
Semakin kecil nilai D menunjukkan nilai error atau perbedaan yang semakin kecil antara model pasut dengan data di lapangan. Sebaliknya, semakin besar nilai D
menunjukkan nilai perbedaan yang semakin besar antara model pasut dengan data di lapangan.
Metode lain intuk melakukan evaluasi terhadap model pasang surut adalah dengan memberikan koreksi pasang surut dari sinyal utama di laut terhadap nilai anomali SSH dari data satelit altimetri. Diasumsikan bahwa model pasang surut yang baik akan ditunjukkan dengan nilai variasi nilai residu SLA terkoreksi pasut model yang minimum (King dkk., 1995). Standar deviasi dan residu SLA dari data satelit altimetri setelah nilai koreksi pasut model dihilangkan dihitung untuk mengetahui variasi laut dapat diminimalkan setelah koreksi pasut dihilangkan. Residu SLA dapat dihitung dengan (Fok dkk., 2010) :
Residu SLA = SLA – (pasut diurnal + pasut semidiurnal) – LP – sinyal musiman ………...……….….(I.15) dimana nilai pasut diurnal dan semidiurnal diperoleh dari model pasang surut. Pada penelitian ini, nilai residu SLA yang dihasilkan masih mengandung nilai LP (pasut ekuilibrium periode panjang) dan sinyal musiman.
I.9. Hipotesis
Selain dari metode pengamatan pasut terestris dan satelit altimetri, data pasut dapat diperoleh dari model pasut global dan regional. Meskipun model pasut global divalidasi dengan data pasut terestris untuk meningkatkan ketelitian pada perairan tersebut, namun belum dapat dipastikan kesesuaiannya dengan wilayah perairan pulau Jawa. Untuk mengetahuinya perlu dilakukan evaluasi terhadap model pasang surut global dan regional dengan dua metode yaitu (1) Nilai konstanta harmonik pasang surut suatu perairan dari model pasut memiliki nilai yang tidak jauh berbeda dengan nilai konstanta harmonik pasang surut dari data lapangan (pengukuran pasang surut terestris) (Lyard dkk., 2005), (2) Model pasut digunakan untuk aplikasi tertentu, misalnya koreksi data satelit altimetri dapat meningkatkan ketelitian atau standar deviasi data satelit altimetri (Fok dkk., 2010).
Pada penelitian ini dilakukan evaluasi terhadap model pasang surut regional BIG yang dibuat dari model TPXO7-Atlas. Model regional ini telah divalidasi dan diasimilasi menggunakan data pasang surut perairan Indonesia sehingga mampu menggambarkan karakteristik pasang surut Indonesia yang mendekati sebenarnya. Selain itu, model FES2012 juga dievaluasi karena model ini memiliki ukuran grid yang rapat yakni 1/16⁰ x 1/16⁰ sehingga dapat memberikan hasil interpolasi yang lebih baik. Model dasar pembuatan model BIG yaitu model TPXO7-Atlas juga dievaluasi pada penelitian ini. Oleh karena itu hipotesis dalam penelitian ini adalah :
1. Berdasarkan hasil penelitian yang dilakukan oleh Fok dkk (2010), nilai amplitudo konstanta harmonik pasut M2 berkisar antara 1,59 cm s.d. 42,03 cm, 1,48cm s.d.11,57 cm untuk S2, 1,47 cm s.d. 15,18 cm untuk K1 dan 1,26 cm s.d.11,01 cm untuk O1.
2. Nilai perbandingan ketelitian (RMS, RSS, RSSIQ dan D) antara konstanta harmonik pasut data model dengan data pasut terestris dari terkecil hingga terbesar berturut-turut adalah model regional BIG, FES2012 dan TPXO7-Atlas. 3. Nilai perbandingan ketelitian (standar deviasi) model pasut regional dan global
untuk aplikasi koreksi data satelit altimetri terkecil dari terkecil hingga terbesar adalah model regional BIG, FES2012 dan TPXO7-Atlas.
4. Model pasang surut yang paling sesuai digunakan pada wilayah perairan pulau Jawa yaitu model regional BIG.