PROTOTIPE PINTU LINTASAN REL KERETA API OTOMATIS
Rasional Sitepu1), Antonius F.L. Tobing1), Ignatius Indra2) E-mail: [email protected]
ABSTRAK
Kecelakaan lalu lintas pada perlintasan rel kereta api kerap terjadi akhir-akhir ini di Indonesia. Kecelakaan tersebut telah menimbulkan banyak korban jiwa baik yang hanya luka-luka maupun yang meninggal serta sejumlah kerugian material lainnya. Penyebab terjadinya kecelakaan tersebut umumnya karena tidak adanya pintu perlintasan, atau kegagalan pintu menutup saat dibutuhkan atau kegagalan operator untuk memerintahkan penutupan pintu perlintasan (human error). Dalam rangka mengurangi kecelakaan tersebut perlu kiranya setiap perlintasan diberi pintu perlintasan. Dan untuk mengurangi human error sebaiknya pintu tersebut bekerja secara otomatis. Untuk itu perlu dikembangkan teknologi yang mampu mengatasi masalah tersebut Jurnal ini bermaksud menguraikan sebuah prototipe teknologi hasil rancangan sendiri berupa pintu perlintasan rel kereta api yang otomatis. Komponen utama yang dipakai pada sistem ini adalah mikrokontroler dan teknologi komunikasi frekuensi radio (modul FR). Berdasarkan hasil uji coba ternyata alat ini bekerja dengan baik. Pintu dapat menutup secara otomotis jika ada kereta api yang akan lewat. Sebaliknya jika kereta api sudah lewat maka pintu akan terbuka secara otomatis. Implementasi alat ini pada lokasi yang sesungguhnya membutuhkan ketersediaan sumber energi listrik bolak-balik. Oleh sebab itu alat ini perlu dikembangkan lebih lanjut sehingga
dapat dioperasikan dengan sumber energi listrik menggunakan aki atau sel surya
.
Kata kunci: kereta api, mikrokontroler, pintu lintasan, frekuensi radio, otomatis PENDAHULUAN
Kecelakaan lalu lintas pada perlintasan rel
kereta api kerap terjadi akhir-akhir ini. Penyebab terjadinya kecelakaan tersebut umumnya karena tidak adanya pintu perlintasan, atau kegagalan pintu menutup saat dibutuhkan atau kegagalan operator untuk memerintahkan penutupan pintu
perlintasan (human error). Hal ini menimbulkan
banyak korban jiwa, baik yang hanya luka-luka maupun yang meninggal serta sejumlah kerugian material lainnya.
Dalam rangka mengurangi kecelakaan lalu lintas pada lintasan kereta api perlu kiranya setiap lintasan diberi pintu lintasan.
Sistem pintu lintasan rel kereta api yang ada di Indonesia pada umumnya masih digerakkan secara manual. Sistem manual pada umumnya bekerja sebagai berikut: ketika operator pengendali menerima sinyal bahwa akan ada kereta api yang melewati penyeberangan maka operator akan segera menurunkan palang pintu untuk menutup jalan penyeberangan bagi bus/motor atau pejalan kaki dan membiarkan kereta api melewati penyeberangan dengan leluasa. Setelah kereta api melintas sepenuhnya maka operator akan menaikkan palang pintu untuk membuka jalan bagi bus/motor/pejalan kaki. Demikian secara
berulang-ulang operator melaksanakan pengendalian palang pintu penyeberangan.
Dari proses tersebut terlihat berbagai kelemahan diantaranya: ketergantungan yang sangat tinggi pada operator sehingga banyak kecelakaan terjadi akibat operator tidak ada di tempat, operator tertidur karena lelah atau jenuh, operator kurang cepat bertindak, atau operator kurang waspada. Kelemahan lain adalah operator tidak menerima sinyal sebagaimana seharusnya sehingga operator tidak bertindak mengendalikan palang pintu. Selain itu, pemasangan pintu lintasan manual pada setiap perlintasan rel kereta api akan membutuhkan jumlah tenaga kerja yang banyak. Penempatan satu operator pada setiap perlintasan kereta api dengan arus lalu lintas kereta api yang tidak terlalu tinggi seperti di Indonesia akan menyebabkan terjadinya inefisiensi.
Oleh sebab itu perlu dikembangkan teknologi yang dapat mengurangi jumlah operator sekaligus mengurangi kecelakaan
akibat human error. Teknologi tersebut adalah
dipakai pada sistem ini adalah mikrokontroler
dan teknologi komunikasi frekuensi radio (RF
module).
TINJAUAN PUSTAKA
Sebuah teknologi otomatis pada dasarnya merupakan teknologi yang dapat bekerja sendiri dalam melaksanakan tugas pokoknya tanpa bantuan operator atau manusia. Dalam hal pintu lintasan kereta api otomatis berarti pintu tersebut dapat membuka dan menutup sendiri sesuai dengan keberadaan kereta api tanpa bantuan operator seperti halnya pada pintu lintasan yang manual. Untuk itu perlu dirancang suatu sistem pintu lintasan yang mampu mengatur diri sendiri tanpa bantuan manusia (operator).
Upaya mewujudkan pintu lintasan yang otomatis tidaklah terlalu sulit. Hal ini ditunjang oleh ketersediaan teknologi yang kian maju terutama ketersediaan teknologi informasi. Dengan banyak menguasai teknologi maka teknologi tersebut dapat dimanfaatkan untuk memudahkan kehidupan manusia.
Williams and Sawyer[1] menyatakan bahwa
teknologi informasi adalah teknologi yang menggabungkan komputasi dengan jalur komunikasi berkecepatan tinggi yang membawa data, suara dan video. Teknologi informasi dapat dikelompokkan menjadi enam kelompok teknologi yakni: teknologi input, teknologi output, teknologi mesin pengolah/pengendali
(processor), teknologi penyimpanan (memori),
perangkat lunak, dan teknologi komunikasi. Kehadiran teknologi informasi telah banyak membantu manusia dalam menyelesaikan tugas-tugas maupun masalah-masalah dalam pekerjaan terutama yang kompleks, rutin, atau berbahaya. Hal ini nampak dari berperannya dalam bidang perbankan, dunia pendidikan, dunia medis, kepolisian, perdagangan, dan perancangan
produk[2]. Ini berarti penggunaan teknologi
informasi dari waktu ke waktu semakin meluas. Tentunya teknologi informasi juga dapat berperan dalam dunia transportasi.
Mikrocontroller AT89S51 adalah salah
satu teknologi mesin pengolah (processor) yang
dilengkapi dengan fasilitas perangkat masukan,
output, dan memori, yang dikemas dalam satu
chip tunggal. Teknologi ini dibuat oleh
ATMEL[3]. AT89S51 dapat mengolah sendiri
(otomatis) informasi yang diterima dan mengeluarkan informasi berdasarkan program
atau perangkat lunak yang diberikan. Spesifikasi
teknis mikrokontroler AT89S51 sebagai berikut:
4K bytes of In-System Programmable (ISP)
Flash Memory yang dapat dihapus dan
ditulis sampai 1.000 kali;
128 X 8-byte internal RAM;
32 jalur masukan/keluaran;
InternalOscillator dan timer circuit;
1 buah jalur serial masukan/keluaran;
256 set instruksi;
2 buah timer/counter 16 bit.
Susunan pin mikrokontroler AT89S51
disajikan pada Gambar 1.
Gambar 1. Susunan pin mikrokontroler AT89S51
Berikut ini adalah penjelasan mengenai fungsi dari masing-masing pin mikrokontroler
AT89S51 sebagai berikut:
- Vcc : Tegangan supply.
- Gnd : ground.
- Port 0 : merupakan port I/O bertipe open
drain bidirectional. Sebagai port
keluaran, masing-masing kaki dapat mengaktifkan delapan
masukan TTL. Pada saat port 0
dalam keadaan high, dapat
digunakan sebagai jalur alamat
(A0–A7) atau jalur data (D0–D7)
selama pengaksesan memori data atau memori program eksternal.
- Port 1 : merupakan portI/O dua arah yang
dilengkapi dengan pullup internal.
Output buffer dari port 1 dapat
mengaktifkan 4 masukan TTL.
Pada saat port 1 dalam keadaan
high, dapat digunakan sebagai
Pada port 1 juga digunakan sebagai
penerimaan alamat byte rendah selama Flash
programming, seperti yang ditunjukkan pada
Tabel 1 di bawah ini:
Tabel 1. Fungsi khusus pada Port1
Kaki port Fungsi khusus
P1.5 MOSI (digunakan dalam In-System
Programming)
P1.6 MISO (digunakan dalam In-System
Programming)
P1.7 SCK (digunakan dalam In-System
Programming)
- Port 2 : merupakan portI/O dua arah yang
dilengkapi dengan pullup internal.
Output buffer dari port 2 dapat
mengaktifkan 4 masukan TTL.
Pada saat port 2 dalam keadaan
high, dapat digunakan sebagai
input. Port2 juga dapat digunakan
sebagai jalur alamat (A8–A15)
selama pengambilan instruksi dari memori program eksternal atau selama pengaksesan memori data eksternal yang menggunakan perintah dengan alamat 16-bit
(MOVX @DPTR).
- Port3 : merupakan portI/O dua arah yang
dilengkapi dengan pullup internal.
Output buffer dari port 3 dapat
mengaktifkan 4 masukan TTL.
Pada saat port 3 dalam keadaan
high, dapat digunakan sebagai
input. Port 3 juga menyediakan
berbagai fungsi khusus, sebagaimana diberikan dalam Tabel 2 di bawah ini:
Tabel 2. Fungsi khusus pada Port3
Kode
port
Alternate Function
Fungsi
P3.0 RXD PortSerial Masukan
P3.1 TXD PortSerial Keluaran
P3.2 INT 0 Port External Interupt 0
P3.3 INT1 Port External Interupt 1
P3.4 T0 Port External Timer 0
Masukan
P3.5 T1 Port External Timer 1
Masukan
P3.6 WR Sinyal tanda tulis
memori data eksternal
P3.7 RD Sinyal tanda baca
memori data eksternal
- ALE/PROG: keluaran ALE ( Address Latch
Enable) akan menghasilkan
pulsa-pulsa untuk mengunci alamat byte
rendah (A0–A7) selama
mengakses memori eksternal.
Pada saat pemrograman flash
berfungsi sebagai pulse input.
- PSEN (Program Strobe Enable): merupakan
sinyal baca untuk memori
program eksternal. Sinyal PSEN
tidak aktif untuk pengambilan program pada memori program
internal (PSEN=0).
- EA/VPP: jika mikrokontroler akan mengeksekusi program dari
memori eksternal lokasi 0000H
hingga FFFFH maka EA
(External Access Enable) harus
dihubungkan ke ground. Apabila
pin EA dihubungkan dengan Vcc,
maka mikrokontroler akan mengeksekusi program pada
alamat 0000H sampai 0FFFH
pada memori program internal dan
alamat 1000H sampai FFFFH
pada memori program eksternal.
- XTAL1: merupakan input untuk inverting
oscillator amplifier dan sebagai
input pada internal clock
operating circuit.
- XTAL 2: merupakan output dari inverting
oscillator amplifier.
- RST: reset. Kondisi high selama 2 siklus
mesin akan mereset mikrokontroler.
Dioda cahaya dan Dioda Photo adalah
teknologi elektronik yang dapat dibentuk
menjadi sensor infra merah[4]. Sensor infra
merah adalah sensor yang dapat berfungsi sebagai pendeteksi ada tidaknya gerakan. Hasil deteksi sensor dapat dikirimkan menjadi masukan mikrokontroler. Dengan demikian sensor infra merah merupakan salah satu
anggota kelompok teknologi input.
Modul Frekuensi Radio (modul FR) adalah salah satu jenis media transmisi nirkabel pada teknologi komunikasi. Teknologi ini terdiri
dari bagian pemancar (transmitter) dan bagian
penerima (receiver). Salah satu jenis modul RF
adalah tipe TLP-434A untuk modul pemancar
(transmitter) dan RLP-434A untuk modul
penerima (receiver)[5]. Teknologi ini dapat
tujuan yang diinginkan. Pemancar TLP-434A
dapat beroperasi dari 2 sampai 12 volt DC
sehingga produk modul RF ini lebih mudah
dalam penggunaannya. Daerah jangkauan dari produk ini adalah 300 kaki (sekitar 100 meter) di dalam suatu daerah yang terbuka atau tanpa halangan dan sekitar 100 kaki (30 meter) di dalam suatu daerah yang terdapat halangan– halangan seperti bangunan ataupun yang lainnya. Hasil transmisi yang dilakukan oleh
modul FR TLP-434A dipengaruhi oleh
faktor-faktor lain seperti: antena yang digunakan,
tingkat kebisingan, dan operating voltage dari
pemancar itu sendiri.
Motor listrik merupakan sebuah teknologi yang mampu mengubah energi listrik menjadi energi mekanik. Energi ini dapat menggantikan tenaga manusia yang dibutuhkan untuk menggerakkan berbagai peralatan mekanik seperti palang pintu rel kereta api. Ada banyak jenis motor listrik. Salah satu diantaranya adalah
motor stepper yaitu motor listrik yang
putarannya berupa langkah demi langkah. Karena itu dapat kendalikan kecepatannya, dan arah gerakannya langkah demi langkah sesuai
dengan kebutuhan[6]. Motor stepper bersama
palang pintu dapat dihubungkan dengan output
mikrokontroller melalui motor driver. Teknologi
ini jika diterapkan pada sistem pintu rel kereta api membuat pembukaan dan penutupan pintu lintasan rel dapat dikendalikan oleh mikrokontroler. Dengan demikian mikrokontroler akan berfungsi sebagai pengganti operator sesuai perangkat lunak yang diterima.
Dari uraian tentang teknologi yang telah tersedia terlihat bahwa pintu lintasan rel kereta api yang otomatis dapat diwujudkan.
METODE PENELITIAN
Skema penempatan alat pada pintu lintasan kereta api disajikan pada Gambar 2.
Gambar 2. Skema penempatan alat palang pintu rel kereta api
Konstruksi pintu lintasan kereta api
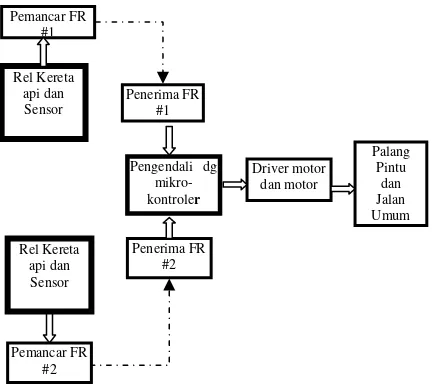
Prototipe pintu lintasan rel kereta api otomatis ini terdiri dari 6 modul sebagaimana disajikan pada Gambar 3, yaitu: 1. modul sensor infra merah; 2. modul frekuensi radio; 3. modul pengendali berbasis mikrokontroler; 4. modul penggerak palang pintu; 5. modul palang pintu; 6. dan modul perangkat lunak pintu lintasan.
Gambar 3. Blok diagram prototipe pintu lintasan kereta api
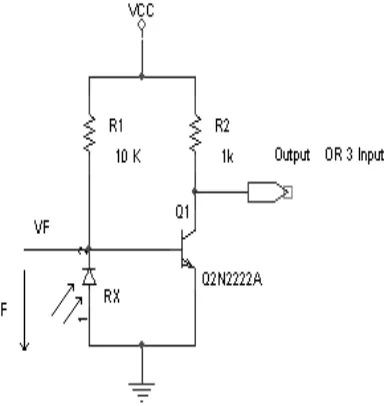
1. Modul sensor infra merah
Modul sensor infra merah terdiri dari bagian pemancar dan bagian penerima. Bagian
pemancar terdiri dari LED dan resistor 470
Ohm sedangkan pada bagian penerima
terdiri dari dioda photo tipe QED122 yang
dihubungkan seri dengan resistor 10k dan
sebuah transistor yang kolektornya dihubung
Lintasan Kereta api Jalan Raya
Sistem Pengendali Palang
pintu
Sensor dan Pemancar FR Penerima FR
Driver motor dan motor
Palang Pintu dan Jalan Umum
Pemancar FR #2
Penerima FR #2 Pengendali dg
mikro- kontroler
Rel Kereta api dan Sensor Pemancar FR
#1
Penerima FR #1
seri dengan resistor 1k
. Gambar 4 dan 5 menunjukkan rangkaian masing-masing bagian pemancar dan penerima sensor.Gambar 4. Bagian pemancar sensor
Gambar 5. Bagian penerima sensor
Modul sensor infra merah berfungsi untuk mendeteksi ada atau tidaknya gerakan yang melintasi sensor tersebut. Dalam hal ini sensor dipasang sedemikian rupa untuk mendeteksi ada atau tidaknya kereta api yang lewat di antara bagian pemancar dan bagian penerima sensor. Ada 6 buah modul sensor infra merah pada sistem tersebut, masing-masing 3 ditempatkan pada sisi kiri dan sisi kanan lintasan rel kereta api. Penempatan ini memungkinkan sistem mendeteksi gerakan kereta api dari dua arah yang berlawanan.
2. Modul Frekuensi Radio (FR)
Modul FR yang digunakan pada sistem ini terdiri atas dua bagian yaitu bagian pemancar sebanyak 2 unit dan bagian penerima sebanyak 1
unit. Bagian pemancar terdiri atas encoder IC
HT12E dan TLP-434A, sedangkan bagian
penerima terdiri atas decoder IC HT12D dan
RLP-434A.
Modul FR TLP-434A menggunakan
modulasi ASK yang beroperasi pada frekuensi
433,92 MHz[5]. Gambar 6 menunjukkan modul
pemancar FR dan Gambar 7 menunjukkan modul FR penerima.
VCC
Gambar 6. Bagian pemancarmodul FR
ANT
Gambar 7. Bagian penerima modul FR
Masukan bagian pemancar modul FR
terhubung dengan modul sensor untuk menerima
data dari sensor. Data tersebut kemudian dipancarkan secara serial dan diterima oleh bagian penerima modul FR. Bagian penerima FR meneruskan data ke mikrokontroler. Oleh sebab itu keluaran bagian penerima modul FR terhubung dengan masukan mikrokontroler. Kedua unit bagian pemancar masing-masing diletakkan pada sisi kiri dan sisi kanan lintasan penyeberangan rel kereta api seperti halnya sensor infra merah.
Encoder HT12E berfungsi mengubah data
dari paralel ke serial berdasarkan application
note, sedangkan HT12D berfungsi membalik
serial ke paralel. Frekuensi carrier HT12E =
3KHz dan frekuensi carrier HT12D = 150kHz.
Nilai resistor osilator pada ICHT12E adalah 1,1
M, nilai resistor oscilator pada HT12D 51 K.
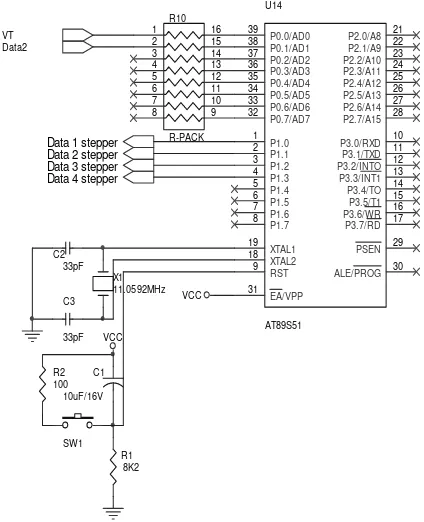
3. Modul Pengendali
Modul pengendali adalah rangkaian
minimum sistem dari mikrokontroler AT89S51
seperti ditunjukkan pada Gambar 8. Modul ini
memiliki pembangkit clock yang terdiri dari dua
kapasitor 33 pF, dan satu buah kristal dengan frekuensi 12MHz. Rangkaian reset menggunakan satu kapasitor 10 uF dan resistor
8,2 k
. PinEA
/Vpp dihubungkan dengan Vcckarena program tidak mengakses memori
external. Port 1.0 sampai port 1.3 digunakan
untuk menggerakkan motor stepper. Port 0.0
digunakan sebagai jalur untuk menerima sinyal
dari sisi pemancar (Tx), sedangkan port 0.1
digunakan sebagai jalur data dari HT12E ke
mikrokontroler.
Mikrokontroler AT89C51 mempunyai
osilator internal (on chip oscillator) yang dapat
digunakan sebagai pewaktu (pencatat waktu). Untuk menggunakan osilator internal ini,
disediakan sebuah kristal antara pin 19 (XTAL
1) dan pin 18 (XTAL 2) dan dua buah kapasitor
yang dihubungkan ke ground. Rangkaian
reset akan aktif ’high’ selama dua machine
cycles osilator bekerja. Nilai kapasitor C1 dan
C2 yang digunakan sebesar 33 pF.
VCC
C3
33pF
Data 1 stepper
C1
10uF/16V
SW1
Data2
Data 2 stepper
VCC
Data 3 stepper
C2 33pF
Data 4 stepper
Gambar 8. Modul pengendali berbasis mikrokontroler AT89S51
4. Modul Penggerak Palang Pintu
Gambar 9 menunjukkan modul penggerak palang pintu. Modul penggerak palang pintu
terdiri dari IC ULN 2803 dan motor stepper
masing-masing satu unit.
VCC
Gambar 9. Modul Penggerak Palang Pintu
IC tersebut berfungsi untuk menggerakkan
motor stepper. Selanjutnya motor stepper
sesuai dengan perintah mikrokontroler. Input IC
ULN 2803 terhubung dengan output
mikrokontroler.
5. Modul Palang Pintu Kereta
Prototipe palang pintu kereta ini dibuat dari akrilik dengan dimensi panjang 12,5 cm, lebar 0,3 cm, dan tinggi adalah 4 cm. Dimensi
ini disesuaikan dengan dimensi motor stepper
yang digunakan yang memiliki panjang 3 cm
dan tinggi dari motor stepper adalah 3,5 cm.
Pada Gambar 10 ditunjukkan tampak depan dari modul palang pintu kereta.
Area tempat prototipe ini terdiri dari 3 bagian, yaitu 2 bagian ditempati oleh modul
sensor-sensor Infra Red beserta modul FR.
Bagian ini berfungsi untuk mendeteksi kereta yang akan melewati lintasan kereta api di dekat palang pintu tersebut. Sedangkan bagian yang lain ditempati oleh palang pintu kereta beserta
dengan motor stepper.
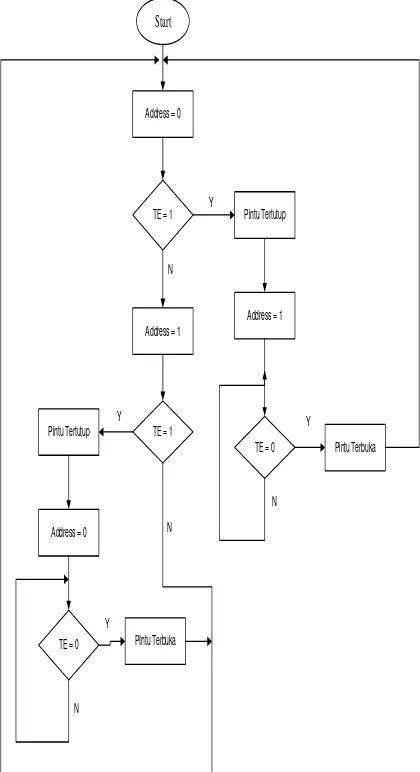
Gambar 10. Modul Palang Pintu Kereta 6. Modul Perangkat Lunak
Perangkat lunak dibutuhkan untuk memprogram cara kerja dari mikrokontroler agar sistem dapat bekerja secara otomatis. Gambar 11 menunjukkan diagram alir program yang digunakan untuk mengendalikan pintu lintasan kereta api secara otomatis.
Cara kerja dari prototipe ini adalah sebagai berikut: Sensor infra merah mendeteksi ada tidaknya kereta api yang akan melewati jalur penyeberangan. Data yang dideteksi oleh sensor diteruskan ke modul FR bagian pemancar. Modul FR bagian pemancar kemudian mengirimkan data ke modul FR bagian penerima untuk diteruskan kepada mikrokontroler. Data yang diterima diolah sedemikian rupa oleh
mikrokontroler. Jika data tersebut mengandung informasi yang mengatakan bahwa ada kereta api yang terdeteksi dari sebelah kiri palang pintu, maka mikrokontroler akan memerintahkan
motor stepper untuk menggerakkan palang pintu
ke posisi menutup. Setelah pintu menutup mikrokontroler akan menunggu sampai ada data dari sensor sebelah kanan. Jika data dari sensor di sebelah kanan menunjukkan informasi bahwa tidak ada kereta api yang lewat, maka
mikrokontroler memerintahkan motor stepper
untuk membuka palang pintu. Hal yang sebaliknya berlaku jika kereta api datang dari sebelah kanan palang pintu.
Start
Address = 0
TE = 1
Address = 1
TE = 1
Pintu Tertutup
Address = 1
TE = 0 Pintu Terbuka Pintu Tertutup
Address = 0
TE = 0 PIntu Terbuka Y
N
Y
Y
N
N
Y
N
HASIL PENELITIAN DAN PEMBAHASAN Pengujian kinerja Prototipe
Pengujian kinerja sistem ini meliputi dua aspek yaitu pengujian masing-masing modul dan pengujian sistem secara keseluruhan.
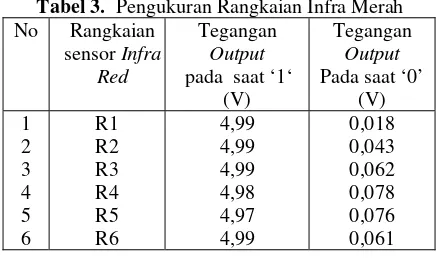
Modul sensor infra merah diuji kinerjanya
dengan multimeter Digital tipe GDM 350.
Kinerja sensor pada saat tidak ada penghalang
akan berlogika ‘1’ atau ‘high’ dan pada saat ada
penghalang akan berlogika ‘0’atau ‘low’, dengan
Vcc=5V. Tabel 3 menunjukkan hasil pengukuran
kinerja sensor secara elektrik. Berdasarkan dari Tabel 3 maka dapat disimpulkan bahwa modul infra merah tersebut berjalan dengan baik karena
level tegangan ouput-nya dapat dibaca oleh
mikrokontroler.
Pengujian Modul FR dilakukan untuk mengetahui apakah modul tersebut dapat mengirimkan data yang diterima dari senosr atau tidak. Pengujian dilakukan dengan mengukur tegangan output bagian penerima saat ada penghalang dan pada saat tidak ada penghalang.
Tabel 3. Pengukuran Rangkaian Infra Merah No Rangkaian
sensor Infra
Tabel 4. menunjukkan hasil pengukuran
tegangan output dari Modul FR pada bagian
penerima. Hasil pengukuran menunjukkan bahwa Modul FR bekerja dengan baik sesuai dengan rancangan.
Tabel 4. Hasil Percobaan Rangkaian Modul FR No Module FR Tegangan
Output
Saat Tanpa Penghalang 1 Penerima
dari Pemancar I
4,77 0,03
2 Penerima dari Pemancar II
4,79 0,04
Hasil percobaan status sensor pintu ditunjukkan pada Tabel 5 sebagai berikut.
Tabel 5. Hasil Percobaan Status Sensor dan Pintu Percobaan
ke:
Status sensor Status Pintu 1 tanpa penghalang
terhalang tanpa penghalang
terhalang tanpa penghalang
terhalang tanpa penghalang
terhalang tanpa penghalang
menutup
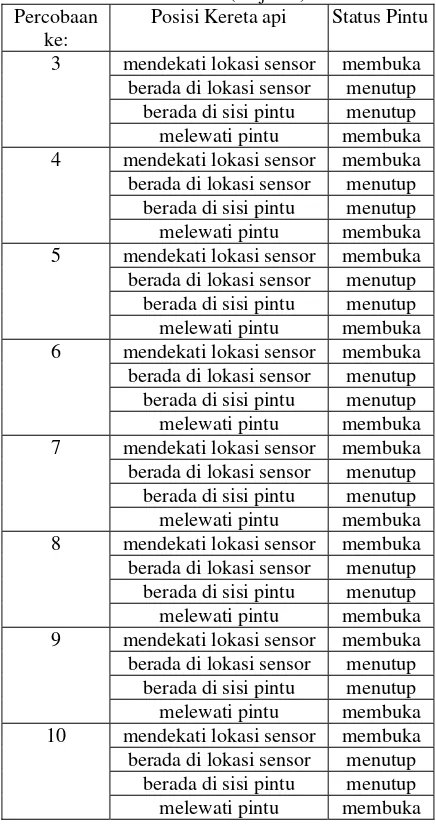
Kinerja sistem secara keseluruhan diuji dengan melewatkan kereta api mainan pada sistem yang dibangun. Untuk itu dibutuhkan kereta api mainan yang dapat bergerak dengan sumber energi baterai serta lintasan berupa rel
kereta mainan. Pengujian dilakukan dari 2 arah
yang berlawanan secara berurutan. Pengujian dilakukan 10 kali. Hasilnya dapat dilihat pada Tabel 6.
Dari Tabel 6 tersebut ditunjukkan bahwa saat ada kereta api yang akan lewat dan terdeteksi oleh sensor, maka pintu otomatis menutup. Selanjutnya jika badan kereta api sudah lewat sepenuhnya pada sensor sisi lainnya, maka pintu otomatis membuka.
Kelemahan sistem ini terletak pada sumber energinya. Saat percobaan dilakukan dengan sumber energi baterai, maka gerakan motor mulai melemah serta daya deteksi sensor juga
melemah. Untuk itu dibutuhkan tegangan Direct
Current (DC) yang besarnya konstan agar fungsi
penutupan dan pembukaan palang pintu tetap berjalan dengan baik.
Tabel 6. Hasil Pengujian Posisi kereta api terhadap status Pintu
Percobaan ke:
Posisi Kereta api Status Pintu 1 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka 2 mendekati lokasi sensor membuka berada di lokasi sensor menutup
Tabel 6. Hasil Pengujian Posisi kereta api terhadap status Pintu (lanjutan)
Percobaan ke:
Posisi Kereta api Status Pintu 3 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka 4 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka 5 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka 6 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka 7 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka 8 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka 9 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka 10 mendekati lokasi sensor membuka berada di lokasi sensor menutup
berada di sisi pintu menutup melewati pintu membuka KESIMPULAN
Telah diuraikan prototipe pintu lintasan kereta api berbasis teknologi informasi terdiri atas 6 modul yaitu modul sensor, modul FR, modul pengendali berbasis mikrokontroler, modul penggerak palang pintu modul palang pintu, dan perangkat lunak. Prototipe tersebut dapat mendeteksi kedatangan kereta api dari dua arah yang saling berlawanan, tetapi secara berurutan. Dari hasil uji coba kinerja prototipe dengan skala laboratorium ternyata secara teknologi, penerapan teknologi mikrokontroler dan teknologi komunikasi frekuensi radio untuk mengendalikan dan mengkomunikasikan pintu dengan sensor pada sistem perlintasan kereta api terbukti berhasil.
Kelemahan prototipe tersebut terletak pada kontinyuitas supplai energi listrik ke sistem.
Jika suplai energi listrik lemah, maka sensor tidak mampu mendeteksi keberadaan kereta api. Kelemahan lainnya adalah bahwa prototipe tersebut belum mampu membedakan kereta api atau benda lain yang bergerak di rel, belum mampu bekerja pada sistem rel dengan banyak kereta api serta belum mampu mengatasi masalah, jika seandainya ada benda yang menghalangi palang pintu saat menutup atau membuka. Untuk pengembangan lebih lanjut sistem ini perlu dilengkapi dengan sensor yang bisa membedakan kereta api atau benda lainnya, sehingga mampu bekerja pada sistem rel kereta api dengan banyak kereta api. Palang pintu yang dibuat belum cerdas, sehingga palang pintu tersebut tidak mampu mendeteksi apakah di bawahnya ada benda yang menghalangi saat turun atau tidak. Oleh sebab itu palang pintu juga perlu dilengkapi dengan sensor yang mampu mendetaksi halangan yang ada pada saat palang pintu membuka atau menutup. Langkah selanjutnya perlu dikaji lebih dalam mengenai kelayakan teknologi ini secara teknis dan ekonomis dengan menggunakan rel dan kereta api sesungguhnya.
UCAPAN TERIMA KASIH
Penelitian ini dapat terwujud berkat dukungan dana dari Universitas Katolik Widya Mandala Surabaya melalui Lembaga Penelitian dan Pengabdian Masyarakat. Untuk itu Penulis mengucapkan terima kasih atas dukungannya.
DAFTAR PUSTAKA
[1] Williams, Brian K. Sawyer, Stacey C.,:
Using Information Technology A Practical Intrdoduction to Computers and
Communications, McGrawHill Book Co.,
Singapura, 2003
[2] Kadir A., Triwahyuni, T.Ch., Pengenalan
Teknologi Informasi, Penerbit Andi Offset,
Yogyakarta, 2003
[3] ATMEL, Microcontroller AT89S51, Data
Sheet, http://www.atmel.com, San Jose,
2001
[4] Floyd, Thomas L., Electronics
Application, Edisi Ketujuh, Pearson Prentice Hall, New Jersey, 2007
[5] LAIPAC, TLP 434A and RLP434A Data
Sheet, Http://www.Laipac.com/, Canada
2004
[6] Wildi, Theodore, Electrical machines,
Drives, and Power Systems, Edisi Kelima,