BAB II
PEMODELAN SISTIM STRUKTUR
2.1 SISTIM STRUKTUR
Secara umum sistim struktur dibedakan dari kegunaan struktur seperti struktur jembatan, struktur gedung, tanki, bendungan dan lain sebagainya.
Secara khusus penamaan ini dibedakan dari fungsi sistem menerima beban luar seperti ;
Struktur bangunan menerima beban dari kegiatan yang ada didalam bangunan tersebut sesuai dengan fungsinya sebagai ruang kelas, rumah sakit, perpustakaan dll.
Struktur jembatan menerima beban kendaraan yang berlalu lalang diatas jembatan tersebut.
Dalam kajian analisis, sistem struktur dibedakan pada dua katagori dasar sistem, yaitu;
Struktur Kerangka
Merupakan rakitan beberapa elemen struktur, umumya terdiri dari elemen balok kolom yang membentuk kerangka yang disebut portal.
Sambungan antara elemen pembentuk portal ini biasanya kaku/ monolit, serta ukuran penampang elemen (lebar dan tinggi) lebih kecil dibandingkan panjang bentang elemen
Struktur Kontinum
2.2 PEMODELAN SISTIM STRUKTUR
Sebelum melakukan proses analisis, pemodelan struktur merupakan suatu langkah awal untuk mendapatkan suatu model analisis untuk digunakan sebagai representasi sistem struktur yang sebenarnya.
Model representasi ini tentulah tidak persis sama dengan struktur nyata, karena untuk mendapatkan sistem yang relatif murah sering diperlukan langkah penyederhanaan (simpilfikasi) yang membutuhkan asumsi pendekatan.
2.3 DISKRITASI STRUKTUR
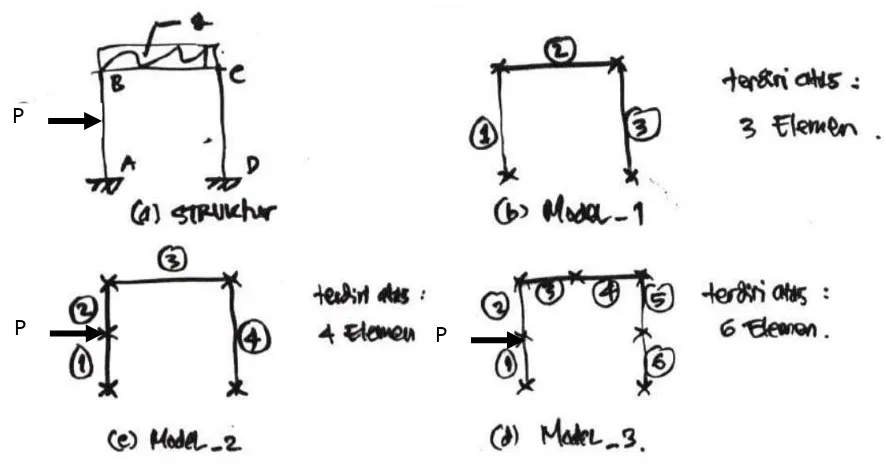
Model analisis struktur matrik didasarkan atas model DISKRIT dari suatu struktur yang di tinjau.
Model diskrit diperoleh dengan cara membagi – bagi struktur atas sejumlah ELEMEN dimana setiap elemen dilingkupi oleh pembatas.
Pembatas pada setiap elemen, antara lain;
Elemen dibatasi oleh TITIK Untuk Elemen 1 Dimensi Elemen dibatasi oleh GARIS Untuk Elemen 2 Dimensi Elemen dibatasi oleh BIDANG Untuk Elemen 3 Dimensi
Gambar 1. Ilustrasi Model Diskrit P
P
2.4 PERPINDAHAN DAN GAYA
Dalam model diskrit sistem strutkur berbentuk rangka, perpindahan translasi dan rotasi dapat diambil sebagai komponen perpindahan padan setiap titik simpul.
Didalam ruang ada tiga translasi pada arah ortogonal (Arah sumbu X, Y dan Z dalam koordinat kartesius) dan tiga rotasi terhadap ketiga sumbu ortogonal tersebut.
Keenam komponen perpindahan ini dinamakan DERAJAT KEBEBASAN TITIK SIMPUL (DEGREE OF FREEDOM).
Berpadanan dengan keenam derajat kebebasan diatas maka terdapat 6 komponen aksi yang terdiri dari 3 gaya pada arah translasi dan 3 momen pada arah rotasi.
Dalam metode matrik, besaran yang mempunyai besar dan arah disebut sebagai vektor, sehingga perpindahan dan gaya adalah merupakan suatu besaran vektor.
Contoh elemen pendel 1D :
Beberapa jenis elemen yang umum dimodelkan beserta komponen perpindahan dan gayanya dapat dilihat pada gambar 2 berikut ini,
Note;
Besarnya matrix kekakuan yg ada akan tergantung pada DOF sebuah struktur...semakin besar DOF...akan semakin besar matrix kekakuan yg harus diselesaikan oleh komputer...yg tentunya semakin lama waktu yg diperlukan utk running.
x y
z
Ux Ux Uy
Uz
y
x
Tabel 01. Komponen perpindahan dan gaya beberapa jenis elemen
Istilah lain yang sering dijumpai sebagai berikut,
2 DIMENSI 3 DIMENSI
Simple Beam Elemen lentur 2D dengan perletakan sederhana sendi - rol
Continuous Beam Elemen lentur
2D
Plane Frame portal 2D yang terdiri elemen balok kolom 2D
Plane Trusses Rangka batang 2D
Space Frame Portal 3D yang
terdiri dari elemen balok kolom 3D
Space Trusses Rangka batang
ruang 3D
Grid Beam Struktur kisi yang
terdiri dari elemen grid
2.5 KRITERIA KESEIMBANGAN DAN KOMPATIBILITAS
Kriteria keseimbangan gaya,
Pada umunya untuk setiap titik simpul dalam struktur ruang (tiga dimensi) terdapat 6 persamaan keseimbangan terhadap gaya – gaya yang bekerja, yaitu;
∑ Fx = 0 ∑ Fy = 0 ∑ Fz = 0 ∑ Mx = 0 ∑ My = 0 ∑ Mz = 0
Dimana subskrip x,y dan z adalah tata sumbu yang dipergunakan untuk dapat menyatakan kedudukan struktur dalam ruang.
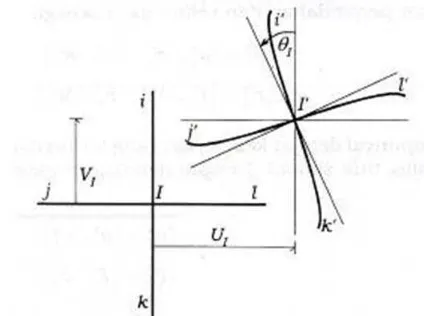
Kriteria Kompatibilitas (Keserasian deformasi),
Kriteria yang mengatur hubungan dari komponen perpindahan satu dengan yang lainnya, sedemikian sehingga kontinuitas perpindahan terjamin diseluruh bagian struktur.
Tinjauan keserasian deformasi ini berdasarkan konsep geometri, contoh;
Rotasi dan translasi harus sama pada setiap ujung batang yang bertemu pada suatu titik simpul dimana batang – batang tersebut dihubungkan secara kaku (Gambar 3)
Gambar 3. Keserasian deformasi pada titik kumpul suatu struktur
2.6 KETIDAK TENTUAN STATIS DAN DINAMIS
Ketidak tentuan statis (Aksi atau gaya yang tidak diketahui)
Banyaknya kelibahan gaya (redundant) struktur dibandingkan dengan jumlah gaya atau aksi yang dapat dihitung hanya dengan menggunakan METODA STATIKA BIASA.
Metoda statika biasa 3 persamaan
Kita bisa memilih salah satu gaya (diantara gaya 1 – 4) untuk dijadikan redundant, agar struktur diatas dapat diselesaikan dengan metode statika biasa (Statis tertentu).
Ketidak tentuan kinematis (Perpindahan tidak diketahui)
Banyaknya derajat perpindahan struktur (translasi dan rotasi) yang tidak diketahui. Jumlah perpindahan titik kumpul yang tidak diketahui ini disebut juga dengan derajat kebebasan atau Degree of Freedom (DOF)
Untuk model struktur diskrit, banyaknya derajat perpindahan yang tidak diketahui bergantung kepada banyaknya titik simpul yang diambil, sebagai contoh,
(Keterangan : elemen diatas adalah elemen balok lentur 2 dimensi)
Note :
Ketidak tentuan statis ini tidak tergantung kepada model diskrit hanya tergantung kepada model perletakan dari struktur, problem ini akan dijumpai pada metode flexibilitas
Note :
Contoh perbandingan Derajat Ketidak tentuan Statis (DKS) dan derajat ketidak tentuan kinematis (DKK)
(Keterangan : elemen diatas adalah elemen balok kolom 2 dimensi)
2.7 PRINSIP SUPERPOSISI
Prinsip SUPERPOSISI berlaku hanya jika hubungan AKSI dan PERPINDAHAN bersifat linier.
2.8 DEFORMASI STRUKTUR
Deformasi didefenisikan sebagai suatu perubahan bentuk yang sangat kecil.
Berdasarkan hubungan antara deformasi dengan gaya dalam yang terjadi maka deformasi terbagi atas ;
1. Deformasi aksial 2. Deformasi lentur 3. Deformasi geser 4. Deformasi puntir
1. Deformasi aksial
EA = Kekakuan Aksial (Aksial Rigidity)
2. Deformasi Lentur
EIz = Kekakuan Lentur (Flexural Rigidity)
3. Deformasi Geser
Shear Stress ;
Shearing Strain ;
Displacemen relatif ;
Dimana, f = Shape faktor
G.A / f = Kekakuan Geser (Shearing Rigidity)
4. Deformasi Puntir
Dimana ;
J = momen inersia polar konstanta torsi
GJ = Kekakuan Puntir (Torsionol Rigidity)