TUGAS AKHIR
PENAMPIL KECEPATAN MOTOR DC DENGAN LED
BERBENTUK JARI BERBASIS MIKROKONTROLER
AT89C51
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik Elektro Fakultas Sains dan Teknologi
Universitas Sanata Dharma
Disusun oleh:
ALDIUS GINTING
NIM: 065114039
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
THE DISPLAY OF DC MOTOR SPEED WITH LED CIRCUITS
LIKE A FINGER BASED ON MICROCONTROLLER AT89C51
In partial fulfillment of the requirements
for the degree of SARJANA TEKNIK Science and Technology Faculty Electrical
Engineering Study Program Sanata Dharma University
BY:
ALDIUS GINTING
NIM: 065114039
ELECTRICAL ENGINEERING STUDY PROGRAM ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY SANATA DHARMA UNIVERSITY
v
Kar ya ini
persembahan t erindah unt uk:
Kedua Orang tuaku terkasih
Keluarga Ginting S uka rumah Galuh
Nd Karoku y ang S etia
vi
M ot o
“Bila engkau ingin mengenal Allah, maka berusahalah mengenal
dirimu lebih dahulu”
(Evagrius Pontikus)
“Setiap manusia wajib mendengarkan apa yang dibisikkan kata
hatinya, setiap orang dapat diajarkan berbuat baik, segala
kelakuan jahat, semata-mata berdasarkan cara berpikir yang
salah”
(Socrates)
“Kit a dapat mencapai banyak dengan ilmu penget ahuan, t et api
hanya cint a t erhadap pekerjaan yang membawa kit a ke
kesempurnaan”
viii
PENAMPIL KECEPATAN MOTOR DC DENGAN LED
BERBENTUK JARI BERBASIS MIKROKONTROLER AT89C51
ALDIUS GINTING 065114039
INTISARI
Penelitian ini mengkaji penampil kecepatan motor DC dengan LED berbentuk jari berbasis mikrokontroler AT89C51. Hal ini bertolak dari asumsi bahwa mikrokontroler AT89C51 dapat digunakan untuk menggerakkan dot matrik LED. Dot matrik LED merupakan salah satu tampilan yang dapat digunakan selain tampilan lainnya, seperti
seven segment dan LCD.
Dalam penelitian ini, pengukuran kecepatan motor DC dirancang dengan menggunakan dot matrik LED sebagai tampilan. Dot matrik LED tersebut disusun menyerupai jari, LED pada dot matrik dipasang secara paralel sebanyak 5 buah LED. Teori yang digunakan untuk merancang penampil kecepatan motor DC tersebut berupa teori mikrokontroler AT89C51, perhitungan piringan encoder, perhitungan nilai tegangan penggerak LED, dan perhitungan nilai rotation per minute (RPM).
Hasil penelitian dapat disimpulkan bahwa kecepatan motor DC dapat ditampilkan pada LED melalui mikrokontroler AT89C51. Tampilan yang dit unjukkan pada LED tersebut merupakan kecepatan dari 100 Rpm sampai dengan 2300 Rpm, dengan kenaikan per 100 Rpm. Untuk titik kritis masih ada error.
ix
THE DISPLAY OF DC MOTOR SPEED WITH LED CIRCUITS
LIKE A FINGER BASED ON MICROCONTROLLER AT89C51
ALDIUS GINTING 065114039 ABSTRACT
This research studied the display of dc motor speed with LED circuits like a finger based on microcontroller AT89C51. It is starting from assumption that a microcontroller AT89C51 can be used to move LED dot matrix. The LED dot matrix is one of the display can be used beside other displays, like a seven segment and LCD.
In this research, the measurement of a DC motor speed is designed by using LED dot matrix as the display. The LED dot matrix is compiled like a finger, LED in the dot matrix attached parallelly of 5 LED. The theories used for designing the display are microcontroller AT89C51 theory, calculation of encoder saucer, calculation of LED driver voltages value, and calculation of rotation per minute (RPM).
The result of research can be concluded that the DC motor speed can be presented on LED through the microcontroller AT89C51. The display presented on LED is the speed from 100 Rpm up to 2300 Rpm, with 100 Rpm increase. For the critis point still exist some error.
x
KATA PENGANTAR
Puji dan syukur penulis dipanjatkan kepada Tuhan Yesus atas berkat dan
karunianya sehingga penulis dapat menyelesaikan Tugas Akhir ini dengan baik.
Penyelesaian Tugas Akhir ini merupakan salah satu syarat yang harus dipenuhi dalam
menyelesaikan studi di Jurusan Teknik Elektro, Fakultas Sains dan Teknologi,
Universitas Sanata Dharma Yogyakarta.
Patut diakui bahwa penyelesaian Tugas Akhir ini merupakan buah usaha keras,
dimana penulis telah mencurahkan segala kemampuan, gagasan, dan segala inspirasi
yang ada, tentunya pula berkat bantuan dan dampingan serta bimbingan dari berbagai
pihak. Namun, penulis menyadari bahwa penyusunan Tugas Akhir ini masih jauh dari
sempurna dan tidak dapat diselesaikan tanpa dukungan dan bantuan dari berbagai pihak.
Oleh karena itu, pada kesempatan ini penulis ingin mengucapkan terima kasih kepada:
1. Bapak A. Bayu Primawan, S.T.,M.Eng selaku Ketua Jurusan Teknik Elektro,
Fakultas Sains dan Teknologi, Universitas Sanata Dharma Yogyakarta. Terima
kasih atas dukungannya selama ini.
2. Ibu Ir. Th. Prima Ari Setiyani, M.T. selaku pembimbing I, terima kasih atas segala
ide, saran, dan inspirasi yang tak ternilai harganya, yang penulis dapatkan selama
menyelesaikan Tugas Akhir ini.
3. Bapak Ir. Tjendro selaku pembimbing II, terima kasih atas segala saran dan
bantuannya yang begitu besar telah membantu penulis untuk menyelesaikan Tugas
xi
4. Bapak Ir. Iswanjono, M.T. dan Bapak Ir. Linggo M. Suwarno, M.T. yang telah
banyak memberikan ide dan gambaran kepada penulis.
5. Para dosen Teknik Elektro yang telah banyak memberi bekal pengetahuan selama
menempuh studi di Universitas Sanata Dharma Yogyakarta.
6. Para karyawan Laboratorium Teknik Elektro, terima kasih atas segala fasilitas
Lab-nya sehingga pembuatan alat untuk Tugas Akhir ini dapat diselesaikan.
7. Bapak Aris Sukarjito, S.IP. selaku Kepala Sekretariat Jurusan Teknik Elektro yang
telah memberikan pelayanan dan perhatian yang sangat baik selama penulis
menempuh studi di Uninersitas Sanata Dharma.
8. Kedua orang tuaku, Bapa Bena Ginting (Alm.) dan Nande Marta br Tarigan yang
telah membimbingku dan terima kasih pula atas semua cinta dan doanya.
9. Saudara-saudaraku yang tidak henti-hentinya memberikan dukungan moral selama
aku menyelesaikan studi di Universitas Sanata Dharma.
10.Keluarga besar Ginting Suka Rumah Galuh yang selalu memberikan saran-saran
kepadaku untuk menyelesaikan studi.
11.Mama Sofian Sitepu dan Mami Sri Ningsih di Giwangan yang telah banyak
membantuku, terima kasih atas perhatian, saran, dan doa yang telah diberikan
kepadaku.
12.Nd Karoku, Rosalana Viva Sitepu yang selalu setia mendampingiku dalam
menyelesaikan Tugas Akhir ini, serta terima kasih atas doa dan cinta yang selalu
diberikan kepadaku.
13.Anak dan keponakanku Vedrik, Steven, Deril, Erik, Efran, Eli, Senni, Eka, Tika,
xii
14.Mbah, Aan, Tedi, Loren, dan Om Bung yang senantiasa bercerita tentang
Yogjakarta.
15.Sawa Geng, Manto (Tabib), Zeno (Sawa Nelen), Sarman (Dewa Mabuk), Riston,
dan Antonius atas segala kenangan yang tidak pernah berakhir atas persahabatan
kita, serta Bang Robert di Gambir yang selalu mena nyakan perkembangan Tugas
Akhirku.
16. Teman-temanku Prana ‘Merana’ “Kapan neh punya pacar?” Terima kasih ya atas
bantuannya; Sularso ‘Opo Man’ terima kasih atas alat-alatnya, “Kapan nyusul?”;
Stenly ‘Beta-Beta’ “Kalau mau bolos ajak-ajak ok”; Toni ‘Parto’ terima kasih atas
saran softwarenya; anak-anak kost Dabag; anak-anak Gambir, kalian adalah yang
terbaik.
17.Semua pihak (tanpa terkecuali) yang telah membantu dan mend ukung kelancaran
penulisan skripsi ini. Tiada kata yang sanggup menggantikan selain rasa terima
kasih yang mendalam.
Sejak awal, penulis menyadari sepenuhnya bahwa skripsi ini masih jauh dari
sempurna. Oleh karena itu, segala kritik dan saran yang membangun sangat penulis
harapkan dari pembaca demi peningkatan dan perbaikan penelitian ini. Akhirnya, penulis
pun berharap kiranya skripsi ini dapat bermanfaat dan memberikan nuansa baru bagi
perkembangan di bidang Mikrokontroler.
xiii
DAFTAR ISI
Halaman
HALAMAN JUDUL………..… i
FINAL PROJECT ………. ii
HALAMAN PERSETUJUAN PEMBIMBING ………..…. iii
HALAMAN PENGESAHAN ……….. iv
HALAMAN PERSEMBAHAN ……… v
MOTO ………vi
PERNYATAAN KEASLIAN KARYA ……….… . vii
INTISARI ………... viii
ABSTRACT ………...………... ix
KATA PENGANTAR ……….. x
DAFTAR ISI … ..………...………...…. xiii
DAFTAR GAMBAR ..… .……….. xvii
DAFTAR TABEL … ..………..……... xix
BAB I PENDAHULUAN ……….. 1
1.1 Latar Belakang ……… 1
1.2 Perumusan Masalah ………1
1.3 Pembatasan Masalah ………... 2
1.4 Tujuan Penelitian ……… 3
1.5 Manfaat Penelitian ………. 3
xiv
BAB II DASAR TEORI ……… 4
2.1 Prinsip Dasar ………... 4
2.2 Sensor Optocoupler … ……… 4
2.3 Encoder ………... 7
2.4 Mikrokontroler AT89C51 ………... 7
2.4.1 Memori ………... 8
2.4.1.1 Memor i Program ……… 8
2.4.1.2 Memor i Data ………... 9
2.4.2 Mode Pengalamatan ………... 9
2.4.2.1 Pengalamatan Langsung ……… 9
2.4.2.2 Pengalamatan Tidak Langsung ……… 10
2.4.2.3 Pengalamatan Data ………... 10
2.4.2.4 Pengalamatan Kode ………..10
2.4.2.5 Pengalamatan Bit ………. 11
2.4.3 Port Paralel ………... 11
2.4.4 Instruksi-Instruksi ……… 14
2.4.4.1 Instruksi-Instruksi Aritmatika ……….. 14
2.4.4.2 Instruksi-Instruksi Logika ……… 14
2.4.4.3 Instruksi-Instruksi Transfer Data ………. 14
2.4.4.4 Instruksi-Instruksi Boolean ……….. 14
2.4.5 Pewaktu CPU ………... 15
2.4.5.1 Timer dan Counter dalam Mikrokontroler AT89C51 ………….. 15
xv
2.4.6 Siklus-Siklus Mesin ………. 17
2.5 Motor DC ……….. 17
2.6 Pemicu Schmitt ………. 29
2.7 Transistor sebagai Saklar ……….. 20
2.8 LED (Light Emitting Diode) ………. 22
BAB III PERANCANGAN PERANGKAT KERAS ……….. 24
3.1 Rangkaian Sensor ……….. 25
3.2 Osilator Kris tal ……… .. 27
3.3 Rancangan Encoder ……….. 28
3.4 Motor DC ……….. 29
3.5 Penampil LED ………... 29
3.6 Penggerak LED ………. 31
3.7 Tombol Start/Reset dan Stop ……… 34
3.8 Skala ………. 35
3.9 Perancangan Perangkat Lunak ……….. 35
3.9.1 Program Utama ……… 35
3.9.2 Diagram Alir Perhitungan Rpm ………... 38
3.9.3 Proses Perkalian ………... 40
3.9.4 Pencuplikan Data Selama Satu Detik ……….. 43
3.9.5 Proses Tampilan ………... 44
BAB IV HASIL PENGAMATAN DAN PEMBAHASAN ………... 45
4.1 Hasil Akhir Perancangan ……….. 45
xvi
4.3 Pembahasan Rangkaian Elektronik ………... 52
4.3.1 Rangkaian Sensor Optis ………... 52
4.3.2 Rangkaian Transistor sebagai Saklar ……….. 54
4.4 Analisis Software………... 55
4.4.1 Pencuplikan Data Satu Detik ……….……….. 55
4.4.2 Perhitungan Rpm ……….... 56
BAB V PENUTUP……… ……….. 59
5.1 Kesimpulan ………... 59
5.2 Saran ………... 59
DAFTAR PUSTAKA ……… ...………...60
xvii
DAFTAR GAMBAR
Halaman
Gambar 2.1 Simbol Optocoupler ………... 5
Gambar 2.2 Rangkaian Optocoupler ………...……….. 5
Gambar 2.3 Piringan ……….. 7
Gambar 2.4 Motor DC ………. 19
Gambar 2.5 Pe micu Schmitt ……… 19
Gambar 2.6 Bentuk Gelombang Masukan dan Keluaran Pemicu Schmitt ……….. 20
Gambar 2.7 Transistor sebagai Saklar ………... 20
Gambar 2.8 Grafik Output dari Transistor ………... 21
Gambar 2.9 Penggerak LED ………... 23
Gambar 3.1 Diagram Blok Alat ………... 24
Gambar 3.2 Rangkaian Sensor ………. 26
Gambar 3.3 Rangkaian Osilator ………... 28
Gambar 3.4 Rancangan Encoder ………...……….. 28
Gambar 3.5 Motor DC ………. 29
Gambar 3.6 Matrik LED ……….. 30
Gambar 3.7 Bentuk Matrik LED yang Disusun ……….. 30
Gambar 3.8 Rangkaian Penggerak LED ………... 32
Gambar 3.9 Rangkaian Lengkap Penggerak LED ………... 34
Gambar 3.10 Rangkaian Tombol Start/Reset dan Stop ……… ... 34
xviii
Gambar 3.12 Diagram Alir Proses Perhitungan RPM ………. 49
Gambar 3.13 Diagram Alir Proses Perkalian ………... 42
Gambar 3.14 Diagram Alir Timer Satu Detik ………. 43
Gambar 3.15 Diagram Alir Pe nampil LED ………. 44
Gambar 4.1 Rangkaian Catu Daya ………... 46
Gambar 4.2 Rangkaian Mikrokontroler ………... 46
Gambar 4.3 Motor, Encoder, dan Tampilan LED …...……… 47
Gambar 4.4 Tombol Start/Reset dan Stop………... 47
Gambar 4.5 Tampilan Pada Saat 600 Rpm………... 48
xix
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi-Fungsi Khusus Port 1 ……… .. … 12
Tabel 2.2 Fungsi-Fungsi Khusus Port 3 ………. …. 13
Tabel 2.3 Register TMOD ………. …. 15
Tabel 2.4 Register TCON ……… 16
Tabel 3.1 Kombinasi Port dalam Penyalaan LED ………. … 31
Tabel 4.1 Perbandingan dengan Tachometer……… 49
Tabel 4.2 Putaran Motor dengan Posisi LED………... 51
Tabel 4.2 Hasil Pengukuran Terhadap Fototransistor……….. …52
1
BAB I
PENDAHULUAN
1.1Latar Belakang
Motor DC merupakan salah satu tipe dari berbagai tipe motor yang ada.
Motor DC tersebut seringkali digunakan dalam kegiatan sehari- hari maupun
dalam industri. Pada umumnya, kecepatan motor DC diukur dengan suatu
instrumen elektronis dengan penampil analog yang biasanya menggunakan jarum
sebagai penunjuk kecepatan putaran atau menggunakan penampil digital.
Penelitian ini akan merancang dan membuat suatu penampil alternatif untuk
mengukur kecepatan motor DC, yaitu dengan tampilan LED. Proses pengukuran
kecepatan motor DC dilakukan dengan rangkaian elektronis, kemudian
pengolahan data dan proses penampil dilakukan oleh mikrokontroler.
Mikrokontroler yang digunakan adalah ATMEL AT89C51 yang merupakan
bagian dari MCS-51.
1.2Perumusan Masalah
Penelitian ini akan merancang suatu mekanik pengukuran kecepatan
motor DC dengan LED sebagai tampilan. Putaran motor DC akan dibaca oleh
suatu sensor optocoupler. Hasil pembacaan dari sensor optocoupler tersebut akan
2
Oleh karena itu, penulis merumuskan permasalahan yang diobservasi
adalah sbb:
1. Bagaimana merancang alat agar menghasilkan data input yang dapat dibaca
oleh sensor optocoupler. Hasil pembacaan tersebut akan dikirim lewat
rangkaian pemicu Schmitt, kemudian diolah mikrokontroler AT89C51.
2. Bagaimana cara mengatur pengaksesan data input maupun data output secara
program atau software.
3. Bagaimana instalasi port agar data digital dapat dibaca dan diterima, serta
diolah oleh mikrokontroler AT89C51.
1.3 Pembatasan Masalah
Dalam melakukan perancangan tugas akhir ini, penulis menggunakan
mikrokontroler AT89C51 untuk mengolah banyaknya putaran motor dalam waktu
tertentu sehingga menghasilkan suatu nilai kecepatan. Perancangan kecepatan
motor tersebut diukur dengan satuan rotation per minute (rpm) dan menggunakan
skala 100, 200, 300, 400, 500, 600, 700, 800, 900, 1000, 1100, 1200, 1300, 1400,
1500, 1600, 1700, 1800, 1900, 2000, 2100, 2200, 2300.
Sebagai piranti masukan pada perancangan, penulis menggunakan sensor
optocoupler dan 2 tombol (start/ reset, stop). Sensor optocoupler berfungsi
sebagai pendeteksi pulsa putaran motor yang berasal dari pantulan sinar infra
merah terhadap motor yang berputar. Cara kerja dari kedua tombol tersebut,
3
mengembalikan ke keadaan semula; dan tombol stop untuk menghentikan proses
pengukuran dan menampilkan data pengukuran terakhir.
Piranti keluaran berupa LED (Light Emitting Diode) akan menampilkan
kecepatan putaran motor.
1.4Tujuan Penelitian
Tujuan ya ng ingin dicapai dalam penelitian ini adalah merancang dan
mengaplikasikan mikrokontroler AT89C51 sebagai alat ukur untuk pengukuran
putaran motor dan menampilkan hasilnya dengan deretan LED yang membentuk
jari.
1.5Manfaat Penelitian
Penelitian ini dapat memberikan suatu alternatif alat untuk mengukur
kecepatan motor, serta memperkaya pengetahuan kita tentang penggunaan
mikrokontroler sebagai piranti pengolahan.
1.6Metode Penelitian
Dalam merancang alat ukur ini, diperlukan langkah- langkah sebagai
berikut:
1. Studi literatur tentang masalah yang ada dan mempelajari cara kerja alat.
2. Perancangan dengan percobaan-percobaan yang sesuai dengan teori yang ada
4
BAB II
DASAR TEORI
2.1 Prinsip Dasar
Pengukur kecepatan motor DC merupakan suatu peralatan yang terdiri
dari piranti mekanis dan rangkaian elektronis dengan menggunakan
mikrokontroler AT89C51. Mikrokontroler AT89C51 merupakan piranti pengolah
data secara hardware maupun software. Perancangan dan pembuatan peralatan
pengukur kecepatan motor DC ini menggunakan beberapa piranti pendukung,
yaitu optocoupler, pemicu Schmitt, motor DC dan indikator LED. Motor DC akan
diukur kecepatannya dengan sensor optocoupler, yang berfungsi untuk mendeteksi
posisi kode biner. Sinyal output optocoupler akan masuk ke pemicu Schmitt
untuk mempertegas sinyal masukan pada mikrokontroler. Pemicu Schmitt yang
digunakan dalam peralatan ini adalah IC TTL yang dihubungkan ke
mikrokontroler melalui port paralel.
2.2 Sensor Optocoupler
Optocoupler merupakan piranti elektronika yang berfungsi sebagai
sensor cahaya. Optocoupler terdiri dari bagian sumber (source) dan penerima
(reciver). Bagian sumber berupa LED infra merah sedangkan penerimanya berupa
transistor photo atau dioda photo. Optocoupler dirancang sedemikian rupa
sehingga cahaya yang dipancarkan dari sumber diterima dengan baik oleh
5
ISO1
OPTO ISOLATOR-A
Gambar 2.1 Simbol Optocoupler
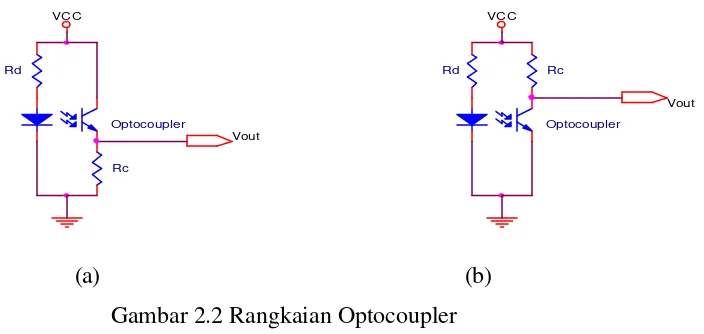
Optocoupler digunakan untuk membaca kode gelap dan kode terang
pada piringan menjadi logika ‘0’dan ‘1’. Gambar rangkaian aplikasi optocoupler
untuk membaca kode gelap dan kode terang seperti pada gambar 2.2 berikut.
VCC VCC
Vout
Vout
Optocoupler Optocoupler Rd
Rc
Rd Rc
(a) (b)
Gambar 2.2 Rangkaian Optocoupler
Ada dua macam rangkaian optocoupler seperti pada gambar 2.2. Pada
gambar 2.2 (a) keluaran optocoupler berlogika ‘1’ jika ada cahaya yang mengenai
transistor photo (membaca kode terang) dan ‘0’ jika tidak (membaca kode gelap).
Sedangkan gambar 2.2 (b) optocoupler berlogika ‘1’ jika tidak ada cahaya yang
mengenai transistor photo (membaca kode gelap) dan logika ‘0’ jika transistor
photo menerima cahaya (membaca kode terang).
Untuk menentukan nilai dari resistansi dioda Rd dan resistansi kolektor
Rc digunakan rumus:
(max) (max) If
Vf Vcc
6 Ic
Vce Vcc
Rc = − ……….2.2
Dimana,
Ve Ie Ic=
Dengan :
Rd = Resistansi Dioda (O)
Rc = Resistansi Kolektor (O)
Vcc = Tegangan (V)
Vce = Tegangan antara kolektor dan emitter (V)
Vf = Tegangan maju Dioda (V)
If = Arus maju Dioda (A)
Ic = Arus Kolektor (A)
2.3 Encoder (Piringan Penyandi)
Piringan penyandi berguna untuk mendeteksi posisi diskret. Dalam
mendeteksi posisi diskret tersebut, perlu digunakan pengkodean posisi. Metode
pendeteksian posisi dilakukan dengan cara membentuk piringan penyandi yang
telah dikodekan dalam kode biner. Resolusi atau tingkat ketelitian pendeteksian
posisi dengan pengkodean dipengaruhi oleh banyaknya bit yang dipakai.
Sandi biner merupakan sandi yang digunakan bagi piranti masukan atau
keluaran untuk mendeteksi setiap perubahan data masukan, pengubah analog ke
7
Untuk menghitung jumlah putarannya dapat dihitung dengan persamaan
2.3 dibawah ini:
60
× =
n p
rpm ……….………2.3
Gambar 2.3 Piringan (Encoder)
2.4 Mikrokontroler AT89C51
AT89C51 adalah mikrokontroler keluaran Atmel dengan 4K byte Flash
PEROM (Programmable and Erasable Read Only Memory). AT89C51
merupakan memori dengan teknologi nonvolatile memory, isi memori tersebut
dapat diisi ulang ataupun dihapus berkali kali.
Memori ini biasanya digunakan untuk menyimpan intruksi (perintah)
sehingga memungkinkan mikrokontroler ini untuk bekerja dalam mode single
chip operation (mode operasi keeping tunggal) yang tidak memerlukan exretnal
memory (memori luar) untuk menyimpan source code tersebut (Nalwan, 2003:1).
Mikrokont roler AT89C51 memiliki 128 x 8 bit internal RAM, 32
programmable I/O lines, 2 timer (counter) 16-bit, Full Duplex UART, Watch
8
2.4.1 Memori
AT89C51 mempunyai struktur memori yang terdiri atas RAM Interna l,
memori sebesar 128 byte yang biasanya digunakan untuk menyimpan variable
atau data yang bersifat sementara. Special Function Register (register fungsi
khusus), memori yang berisi register register mempunyai fungsi fungsi khusus
yang disediakan oleh mikrokontroler tersebut, seperti timer serial, dan lain lain.
Flash PEROM, memori yang digunakan untuk menyimpan instruksi instruksi
AT89C51. AT89C51 mempunyai struktur memori yang terpisah antara RAM
Internal dan Flash PEROMnya. RAM Internal dialamati oleh RAM Address
Register (Register Alamat Program) dengan adanya struktur memori yang terpisah
tersebut RAM Internal dan Flash PEROM mempunyai alamat awal yang sama
yaitu alamat 00, namun secara fisiknya kedua memori tersebut tidak saling
berhubungan tersebut (Nalwan, 2003:4-5).
2.4.1.1 Memori Program
Memori program sering juga disebut dengan Flash Memory dengan
kapasitas sebesar 8K-byte yang hanya digunakan untuk membaca saja. Memori ini
dapat diakses pada alamat 0000H-1FFH. Alamat memori program panjangnya
selalu 16-bit, walaupun demikian jumlah memori program yang digunakan bisa
9
2.4.1.2 Memori Data
Memori ini terbagi atas dua bagian yaitu: 128 byte internal RAM dan
128 byte special function register (SFR). Alamat memori data internal selalu 8 bit
atau 1 byte, yang konsekuensinya hanya mampu mengalamati hingga 256 byte
saja. Internal RAM dipetakan pada alamat 00H-FFH dan dapat diakses
mernggunakan pengalamatan langsung serta pengalamatan tidak langsung,
sedangkan SFR dipetakan pada alamat 80H-FFH dan hanya dapat diakses dengan
pengalamtan tidak langsung.
2.4.2 Mode Pengalamatan
Dalam pembuatan program pada mikrokontroler terdapat beberapa jenis
pengalamatan data atau operan yaitu:
2.4.2.1 Pengalamatan Langsung
Proses pengalamatan ini terjadi pada sebuh perintah ketika nilai operan
merupakan data yang akan diproses. Hanya data internal saja yang bisa diakses
secara langsung.
Contoh: MOV A,#05H
MOV A,#data
Instruksi ini melakukan operasi memindahkan data pada alamat 05H ke
10
2.4.2.2 Pengalamatan Tidak Langsung
Proses pada pengalamatan ini terjadi pada sebuah perintah ketika salah
satu operan merupakan register yang berisikan alamat dan data yang akan diisi
atau dipindahkan.
Contoh: MOV R0,#50H
loop
MOV @R0,#08H
INC R0
CJNE R0,#58, loop
Interuksi ini melakukan operasi memindahkan data dari alamat memori
yang ditunjuk oleh register R1 ke akumulator(Nalwan, 2003:70).
2.4.2.3 Pengalamatan Data
Proses pengalamatan ini terjadi pada sebuah perintah ketika nilai operan
merupakan alamat dari data yang akan diisi, dipindahkan atau diproses (Nalwan,
2003:70).
Contoh: MOV R0,A
2.4.2.4 Pengalamatan Kode
Pengalamatan kode merupakan pengalamatan ketika operan merupakan
alamat dari instruksi JUMP dan CALL (ACALL, JMP, LJMP, dan LCALL).
Biasanya operan tersebut akan menunjukkan ke suatu alamat yang telah diberi
11
2.4.2.5 Pengalamatan Bit
Proses Pengalamatan ketika operan menunjuk kealamat pada RAM
internal yang mempunyai kemampuan pengalamatan secara bit(Nalwan, 2003:72).
2.4.3 Port Paralel
Mikrokontroler AT89C51 mempunyai empat buah port, yaitu port 0,
port 1, port 2, dan port 3 yang terletak pada alamat 80H, 90H, A0H dan BOH.
Namun,jika digunakan eksternal memori ataupun fungsi- fungsi lain seperti
Eksternal Interupt, Serial ataupun Eksternal Timer, Port 0, Port 2 dan port 3 tidak
dapat digunakan sebagai port dengan fungsi umum. untuk itu disediakan port 1
yang dikhususkan untuk port dengan fungsi umum.
Semua port dapat diakses dengan pengalamatan secara bit sehingga dapat
dilakukan perubahan output pada tiap-tiap PIN dan port ini tanpa mempengaruhi
pin-pin lainnya.
Port 0
Port 0 merupakan port keluaran / masukan ( I / O), yang dapat juga
dikonfigurasikan sebagai bus alamat / data bagian rendah (low byte) selama
pengaksesan memori data dan program ekternal. Selain ini port 0 juga menerima
kode-kode yang dikirimkan kepadanya selama pemerosesan pemerograman. Dan
mengeluarkan kode-kode selama proses vertifikasi program yang telah tersimpan
12
Port 1
Port 1 merupakan port keluaran / masukan ( I / O ) dwi arah yang
dilengkapi dengan pull up internal, dan dapat menerima alamat bagian rendah
(low byte) selama pemerograman dan vertifikasi flash (Putra, 2002:74).
Tabel 2.1 Fungsi – fungsi khusus Port 1
Pin Port Fungsi Alternatif
P1.0 T12 (Timer/Counter 2 ekternal input) P1.1 TO2 (Timer/Counter 2 ekternal Output)
P1.2 T2EX (Timer/Counter 2 Capsture/ Reload trigger) P1.3 SSI (Slave port select input)
P1.4 SSO (Slave port select output)
P1.5 MISO (Master data input, slave data output pin untuk SPI)
P1.6 MISO (Master data input, slave data input pin untuk SPI)
P1.7 SCK ( Master clock input, slave data input pin untuk SPI)
Port 2
Port 2 merupakan port keluaran / masukan (I / O) dua arah yang
dilengkapi dengan pull up internal, juga dapat memberikan byte alamat bagian
tinggi (high byte) selama pengambilan instruksi dari memori program ekternal
(Putra, 2002:74).
Port 3
Port 3 merupakan port keluaran / masukan dua arah yang dilengkapi
dengan pull up internal, serta dapat menerima sinyal-sinyal kontrol selama
13
Table 2.2 Fungsi- fungsi khusus kaki port 3
Kaki Port Fungsi alternative
P3.0 RXD (port masukan serial)
P3.1 TXD(port keluaran serial)
P3.2 INT0 (interupsi ekternal 0)
P3.3 INT1(interupsi eksternal 1)
P3.4 T0(masukan ekternal pewaktu/pencacah 0) P3.5 T1(masukan ekternal pewaaktu/pencacah 1) P3.6 WR(sinyal baca data memori data ekternal) P3.7 RD(sinyal tanda tulis memori data ekternal)
PSEN
Program Store Enable merupakan sinyal baca untuk memori program ekternal.
ALE
Keluaran ALE (Address Lacth Enable) menghasilkan pulsa-pulsa yang
akan digunakan untuk memancing byte rendah (low byte) alamat semua
mengakses memori ekternal. Kaki ini juga berfungsi sebagai masukan pulsa
program selama pemerograman flash.
RST
Merupakan masukan reset apabila diberi masukan ‘1’ selama dua siklus
mesin pada saat osilator bekerja maka akan mereset mikrokontroler tersebut.
XTAL 1 dan XTAL 2
Mikrokontroler AT89C51 telah memiliki on-chip osilator yang dapat
bekerja dengan menggunakan kristal ekternal yang dihubungkan kekaki XTAL 1
14
2.4.4 Instruksi Ins truksi
Merupakan perintah yang dapat dimengerti sehingga dapat dilaksanakan
oleh mikroprosesor. Pada mikrokontroler AT89C51 memiliki beberapa instruksi
antara lain adalah:
2.4.4.1 Instruksi-Instruksi Aritmatika
Instruksi- instruksi yang digunakan adalah ADD, ADDC, SUBB, INC,
DEL, MUL, DIV, DA.
2.4.4.2 Instruksi-Instruksi Logika
Instruksi- instruksi logika ini biasanya digunakan untuk melakukan
operasi Boolean seperti; AND, OR, XOR, NOT, ANL, ORL, XRL, CLR, CPL,
RL, RLC, RR, RRC, SWAP.
2.4.4.3 Instruksi-Instruksi Transfer Data
Instruksi ini berfungsi untuk menyalin atau mengambil data yang
tersimpan dal;m memori program dan data. Instruksi- instruksi tersebut meliputi;
MOV, MOVX, MOVC, PUSH, POP, XCHD dan XCH.
2.4.4.4 Instruksi-Instruksi Boolean
Instruksi ini berfungsi untuk manipulasi dari beberapa instruksi yang
telah disebutkan diatas anatar lain; CLR, ANL, ORL, SETB, MOV, JNC, JC,
15
2.4.5 Pewaktu CPU
2.4.5.1 Timer dan Counter dalam Mikrokontroler AT89C51
Mikrokont roler AT89C51 dilengkapi dengan dua perangkat timer
counter yaitu timer 1 dan timer 2. Pencacah biner timer / counter AT89C51
merupakan pencacah biner naik yang mencacah dari 0000h sampai FFFFh, saaat
kondisi pencacah berubah dari FFFFh kembali ke 0000h akan timbul sinyal
limpahan (overflow). Registe-register yang terdapat dalam timer / counter
mikrokontroler AT89C51 adalah register TMOD (Timer Mode Register), THx dan
TLx, serta register TCON (Timer Control Register) (Putra, 2002:112).
a. Timer Mode Register
Register TMOD terdiri atas 8 bit dengan konfigurasi seperti yang
ditunjukkan pada tabel 2.3 berikut ini.
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
Gate C/T M1 M0 Gate C/T M1 M0
Tabel 2.3 Register TMOD
Gate : Bit pengatur saluran sinyal detak
C/T : 1= Counter
0= Timer
16
b. THx dan TLx (x adalah nomor timer)
Merupakan register yang menunjukkan nilai dari timer dimana
masing-masimg timer mempunyai dua buah register yaitu THx untuk high byte dan TLx
untuk low byte.
c. Timer Control Register
Pada register ini hanya 4 bit saja, yaitu bit 4, bit 5, bit 6, dan bit 7 dari
register TCON yang mempunyai fungsi berhubungan dengan timer seperti yang
ditunjukkan pada tabel 2.4
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT1
Tabel 2.4 Register TCON
TF1 : Timer 1 Overflow Flag yang akan set bila timer overflow
TR1 : 1 = Timer 1 aktif
0 = Timer 1 non aktif
TF0 : Sama dengan TF1 tetapi bit ini untuk timer 0
17
d. Mode Timer
Mode timer terdiri dari:
a. Mode 0 timer 13 bit.
b. Mode 1 timer 16 bit.
c. Mode 2 timer 8 bit auto reload.
d. Mode 3 Split timer.
2.4.5.2 On-Chip Oscilator
Mikrokontroler AT89C51 meemiliki oscilator onchip, yang dapat
digunakan sebagai sumber detak (clock). Untuk menggunakannya maka
dihubungkan sebuah resonator kristal atau kermaik diantara kaki-kaki XTAL1 dan
XTAL2 pada mikrokontroler dan menghubungkan kapasitor ke ground.
2.4.6 Siklus -Siklus Mesin
Pembangkit Clock internal menentukan rentetan kondisi-kondisi yang
membentuk sebuah siklus mesin mikrokontroler. Siklus mesin tersebut diberi
nomor S1 samapai S6. Masing- masing kondisi panjangnya adalah dua priode
osilator. Satu siklus mesin panjangnya paling lama dikerjakan dalam 12 priode
osilator, apabila frekuensi kristalnya adalah sebesar 12 MHz (Putra, 2002:22).
2.5 Motor DC
Motor adalah suatu mesin listrik yang menghasilkan gerak mekanis
18
searah (DC) dan motor arus bolak-balik (AC). motor arus searah membutuhkan
tegangan searah untuk bekerja. prinsip kerja motor DC dapat dijelaskan denga n
Hukum Lorenz.
θ
sin BIl
F = ……….……….2.4
Dengan B adalah medan magnet, Iladalah arus, F adalah arah gaya, ?
adalah sudut arah medan magnet terhadap arus ( Young & Freedman, 2000: 167).
Motor DC merupakan salah satu jenis dari motor yang mempunyai
prinsip kerja berdasarkan dua hal berikut:
1. Jika sebuah penghantar bergerak memotong medan magnet, maka pada
penghantar Rb akan timbul tegangan induksi.
2. Jika sebuah penghantar yang mengalirkan arus listrik berada dalam medan
magnet, maka penghantar tersebut akan mengalami sebuah gaya yang arahnya
dapat ditentukan dengan menggunakan aturan tangan kanan. Motor DC
bekerja pada hukum yang kedua, yang kecepatan putarannya dapat ditentukan
dengan rumus berikut:
ϕ
π k
IaRa V
N = × −
2 60
……….2.5
N= kecepatan putaran motor (rpm)
V= teganagan terminal (V)
Ia= arus jangkar (A)
Ra= hambatan jangkar (ohm)
ϕ= fluks magnet (Wb)
19 Gambar 2.4 Motor DC
2.6 Pemicu Schmitt
Pemicu Schmitt merupakan ragkaian yang digunakan untuk mendeteksi
suatu tegangan yang telah melintasi suatu rangkaian tertentu. Rangkaian pada
pemicu Schmitt berupa pembandingan tegangan. Pembanding ini digunakan
sebagai pembentuk pulsa.
Bentuk gelombang pada pemicu schmitt mempunyai waktu naik turun
yang sangat lamban. Bentuk gelombang seperti ini akan dapat menyebabkan
operasi dan kinerja rangkaian yang tidak dapat diandalkan apabila langsung ke
rangkaian perhitungan atau rangkaian lainnya. Untuk itu perlu ditambah rangkaian
pengkondisi sinyal yang berupa pemicu Schmitt.
20
Gambar 2.6 Bentuk Gelombang Masukan dan Keluaran Pemicu Schmitt
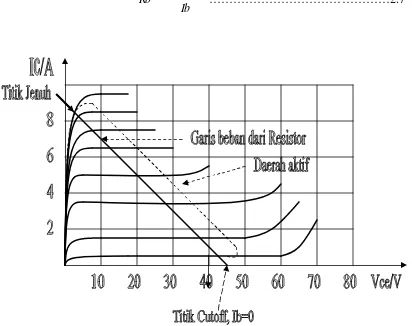
2.7 Transistor sebagai Saklar
Transistor merupakan suatu piranti elektronik yang memiliki beberapa
fungsi, antara lain sebagai saklar dan penguat arus (buffer). Transistor mempunyai
tiga daerah kerja yaitu : daerah aktif, daerah cut-off dan daerah saturasi, seperti
gambar 2.7.
VCC
RB
2 1
RC
2
1
Q
3 2
1
21
Pada daerah cut-off basis transistor tidak diberi tegangan bias atau tidak
ada arus IB yang mengalir. Pada kondisi ini transistor dibias balik, sehingga :
I
b= 0
V
ce (cut-off)= V
ccPada daerah saturasi, tegangan kolektor emitter VCE sama dengan
tegangan saturasi VCE(sat), hal ini menyebabkan arus yang mengalir lewat
kolektor adalah maksimum yaitu: (Blocher, 2003:143)
Rc Vcc
Ic= ………...……….2.6
Ib Vbe Vb
Rb = − ………2.7
22
2.8 LED (Light Emitting Diode)
LED adalah dioda penghasil cahaya, dimana energi yang dikeluarkannya
berupa energi pemancar cahaya. Dioda biasa dibuat dari bahan Silikon yaitu
bahan yang menghalangi pengeluaran cahaya. Tetapi LED berbeda yaitu
menggunakan bahan dengan unsur Gallium, Arsen dan Fospat yang dapat
menghasilkan atau memancarkan cahaya merah, hijau, kuning dan jingga.
Dalam banyak aplikasi elektronik LED merupakan dioda yang jika
diberi tegangan bias maju akan mengeluarkan cahaya. Jika diberi bias balik maka
piranti ini akan berfungsi sebagai sebauh dioda biasa, yakni sebagaimana saklar
dalam kondisi off (terbuka). LED memiliki tegangan maju (forward voltage)
minimum yang biasnya disebut VLED agar dapat bekerja. Tegangan ini bervariasi
untuk masing- masing tipe LED. Variasi VLED berkisar antara 1,7 Volt sampai
dengan 4,2 Volt. Namun kebanyakan LED mempunyai VLED sekitar 2,2 Volt.
Matrik LED adalah kumpulan beberapa LED dalam jumlah tertentu yang
disusun secara teratur dalam baris dan kolom. Berdasarkan jumlah baris dan
kolomnya, terdapat cukup banyak tipe matrik LED yakni dengan ukuran: 4 x 4, 8
x 8, 16 x 16. Berdasarkan koneksi anoda dan katoda pada kolom atau baris, matrik
LED dibedakan atas dua bagian yaitu; anoda kolom dan katoda kolom. Dalam
perancangan ini digunakan penampil LED yang dirancang agar bekerja seperti
matrik LED katoda kolom. (Cabral, 2005:16)
Hal yang perlu diperhatikan dalam perancangan sebuah penampil yang
menggunakan sistem kerja matrik LED adalah bagaimana membentuk suatu
23
tertentu. Pada umumnya untuk membuat semua LED pada kolom pertama
menyala, maka pin baris yakni pin pertama diberi logika rendah atau 0, dan semua
pin kolom diberi logika tinggi atau 1, sedangkan pin baris yang lain diberi logika
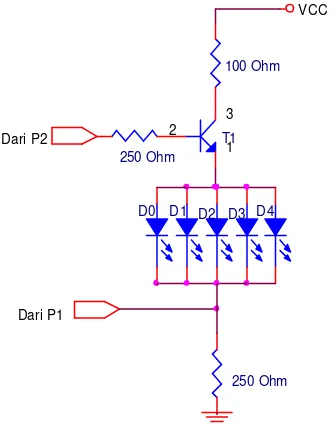
tinggi.
VCC
T1
3 2
1
D0 250 Ohm
100 Ohm
D4 D2 D3 D1
250 Ohm
Dari P2
Dari P1
Gambar 2.9 Penggerak LED
Dengan asumsi bahwa tegangan antara kolektor – emitor pada transistor
saklar adalah 0 saat transistor ON (dalam keadaan tertutup). Besarnya hambatan
kolektor dan basis adalah :
24
BAB III
PERANCANGAN PERANGKAT KERAS
Alat Pengukur kecepatan putaran motor berbasis mikrokontroler
AT89C51 ini merupakan suatu alat ukur yang dapat menghitung banyaknya
putaran motor dalam satuan waktu, yaitu rotation per minute (rpm). Secara
umum, prinsip kerja dari pengukur kecepatan motor DC ini adalah mendeteksi
celah-celah piringan penyandi yang dipasang pada mekanik motor, yang akan
dikodekan oleh sensor optocoupler. Selanjutnya, data akan dikirim dari
optocoupler ke mikrokontroler untuk diolah menjadi kode-kode biner yang
kemudian data tersebut akan ditampilkan ke LED yang tersusun seperti
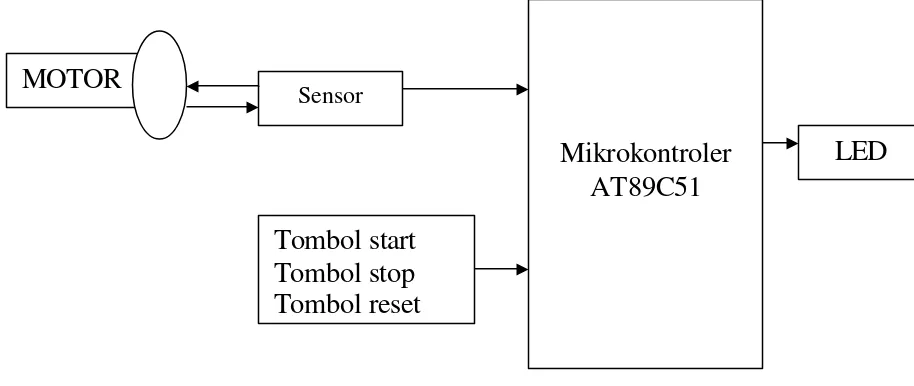
membentuk jari. Pada gambar dibawah ini adalah gambaran umum dari sistem
kerja dari alat yang akan dirancang. Masing- masing bagian memiliki fungsi
tersendiri seperti yang dijelaskan setelah gambar 3.1 berikut ini:
Gambar 3.1. Diagram blok alat
MOTOR
Mikrokontroler
AT89C51
Sensor
Tombol start
Tombol stop
Tombol reset
25
3.1 Rangkaian Sensor
Sensor yang digunakan pada perancangan yaitu optocoupler yang
berfungsi sebagai penerima cahaya dan LED (light emitting diode) inframerah
sebagai sumber cahaya. LED tersebut bekerja hampir sama seperti LED biasa
sebagai penghasil cahaya.
Ranngkaian sensor menggunakan rangkaian gambar 2.2 untuk
menentukan hambatan pembatas inframerah (Rd) seperti gambar 2.2 perlu
diketahui arus maju dioda maksimal yaitu sebesar IF(max) = 60 mA dengan
tegangan maju adalah 1,7 V (Data Sheet Optocoupler H21A3). Dengan
menggunakan persamaan 2.1 akan didapat Rd minimal sehingga:
mA V V Rd
60 7 , 1
5 −
=
Rd = 55 Ohm
Pada penelitian ini resistor RD yang dipakai adalah sebesar 68Ω.
Cahaya inframerah yang masuk ke optocoupler akan dianggap sebagai
arus basis. Keadaan tersebut mengakibatakan resistansi emitor-kolektor akan
menjadi kecil sekali mendekati nol, sehingga arus Ic akan mengalir kekaki
kolektor. Hal ini menyebabkan tegangan pada kaki kolektor- emitor mendekati nol
sehingga keluaran Vout berubah dari tinggi menjadi rendah. Apabila tidak ada
cahaya inframerah yang masuk ke sensor optocoupler, arus basis tidak ada
26
melewati kolektor. Hal ini mengakibatkan tegangan keluaran Vout berubah dari
rendah menjadi tinggi.
Dalam keadaan saturasi tegangan optocoupler Vce maksimal adalah 0,4
volt dengan arus Ic = 1,8 mA (Data Sheet Optocoupler). Dengan menggunakan
persamaan diatas maka didapat Rc sehingga:
mA V Rc
5 , 0
) 4 , 0 5 (
min = −
ΚΩ =9,2 min
Rc
Jadi Rc yang digunakan adalah 10 KO
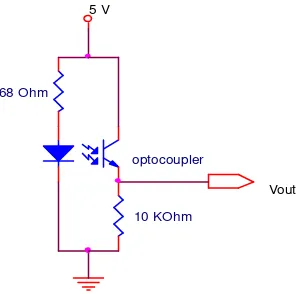
Gambar rancangan sensor selengkapnya dapat dilihat pada gambar 3.2
5 V
Vout 68 Ohm
10 KOhm optocoupler
Gambar 3.2 Rangkaian sensor
Pada saat piringan penyandi sedang berputar, rangkaian sensor akan
mendeteksi celah gelap dan terang yang terdapat pada piringan penyandi. Saat
celah gelap terdeteksi oleh sensor LED inframerah, phototransistor akan OFF.
Tegangan antara kolektor dengan emiter akan berada pada kondisi tinggi dimana
27
sebaliknya pada celah terang pada piringan penyandi yang terdeteksi maka
phototransistor akan ON dan tegangan antara kolektor dengan emitter menjadi
rendah. Dengan demikian, keluaran pada IC 74LS14 adalah logika tinggi (1).
Keluaran rangkaian pendeteksi (0 atau 1) yang telah ditegaskan rangkaian pemicu
Schmitt akan menjadi data masukan mikrokontroler AT89C51 lewat port
pararelnya. Data-data masukan itu akan diolah dalam program dan kemudian hasil
pengolahan data tersebut akan ditampilkan melalui rangkaian LED indicator atau
penampil LED.
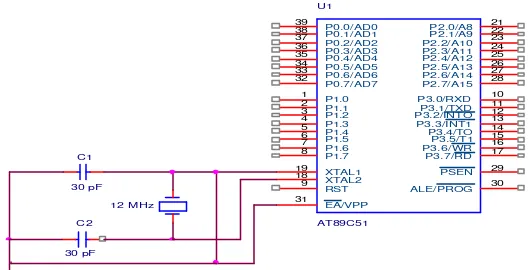
3.2 Osilator Kristal
Rangkaian Osilator kristal ini terdiri dari dua kapasitor dan kristal.
Kedua nilai kapasitor tersebut adalah 30 pF.Rangkaian ini berfungsi sebagai
frekuensi kerja bagi mikrokontroler. Nilai dari frekuensi akan mempengaruhi
kecepatan kerja mikrokontroler dalam menyelesaikan suatu intruksi. Pada
perancangan digunakan kristal 12 MHz yang dapat memberikan instruksi cycle
time sebesar 1 µs. Satu siklus mesin mikrokontroler AT89C51 dikerjakan dalam
12 periode osilator. Dengan mengetahui cycle time dari mikrokontroler maka akan
mempermudah perhitungan waktu bagi alat dalam mengukur besarnya putaran
28 C1 30 pF C 2 30 pF U1 AT89C51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 PSEN ALE/PROG EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 12 MHz
Gambar 3.3 Rangkaian Osilator
3.3 Rancangan Encoder
Prinsip dari pengukuran kecepatan pada program dibawah ini adalah
perhitungan rotasi setiap detiknya, kemudian dikalikan dengan 60 agar menjadi
rotasi per menit. Dalam hal ini jumlah celah pada roda cacah juga berpengaruh.
Pada perancangan dipakai roda cacah dengan 10 buah celah. Dengan demikian
dalam 1 kali putaran akan menghasilkan pulsa dengan logika “0” dan logika “1”
sebanyak 10. Jika banyaknya pulsa setiap detiknya adalah p dan jumlah celah
adalah n, maka kecepatan putar motor setiap menitnya (rpm) dapat dihitung
dengan persamaan 2.3.
29
3.4 Motor DC
Motor DC jika diberi suatu tegangan akan menghasilkan putaran berupa
cw dan ccw. Dalam perancangan ini putaran motor akan diukur oleh suatu
rangkaina elektronis. Untuk dapat mengatur kecepatan motor yang digunakan
maka harus dihubungkan dengan sebuah potensiometer sebesar 10 Kohm. Motor
yang digunakan adalah dengan spesifikasi tegangan masukan 12 V dan
putarannya sampai 4000 RPM.
Gambar 3.5 Motor DC
3.5 Penampil LED
Penampil untuk pengukur kecepatan yang digunakan pada piranti ini
adalah suatu penampil indikator LED yang bekerja berdasarkan prinsip kerja
matrik LED. Seperti yang telah dijelaskan pada pembahasan sebelumnya bahwa
perancangan rangkaian indikator LED yang digunakan adalah adalah matrik LED
5 x 5. Masing- masing dari tiap LED hanya dapat menjadi indik ator untuk satu
kondisi masukan saja. Karena kondisi yang dibutuhkan oleh piranti ini sebanyak
22 keadaan data masukan, sedangkan jumlah LED yang tersedia sebanyak 25
LED. Untuk menyalakan LED pada tiap baris dan kolom, diperlukan dua port dari
30
kolom, sedangkan port 2 (port 2.0 sampai dengan port 2.4) digunakan untuk
kelima baris dari matrik LED. Cara menyalakan tiap satu LED pada baris dan
kolom tertentu yaitu mengirim masing- masing 5 bit ke port 1 dan port 2. Apabila
LED D0 yang ingin dinyalakan, maka ur utan pada masing- masing port adalah :
Pada port 1 (port1.0 – port1.4) urutan bitnya adalah 1 0 0 0 0. Sedangkan pada
port 2 (port2.0 – port2.4) urut an bitnya adalah 1 0 0 0 0. Urutan bit tersebut
sebelumnya telah ditetapkan kesetaraanya dengan satu kondis i sinyal masukan
dalam program.
Gambar 3.6 Matrik LED
31
Tabel 3.1 dibawah ini merupakan tabel untuk kombinasi port dan urutan
bit pada tiap port untuk menyalakan masing- masing LED berikut kondisi data
masukan yang diwakilinya.
LED P1.0 P1.1 P1.2 P1.3 P1.4 P2.0 P2.1 P2.2 P2.3 P2.4
100 RPM 0 1 1 1 1 1 0 0 0 0
200 RPM 1 0 1 1 1 1 0 0 0 0
300 RPM 1 1 0 1 1 1 0 0 0 0
400 RPM 1 1 1 0 1 1 0 0 0 0
500 RPM 1 1 1 1 0 1 0 0 0 0
600 RPM 0 1 1 1 1 0 1 0 0 0
700 RPM 1 0 1 1 1 0 1 0 0 0
800 RPM 1 1 0 1 1 0 1 0 0 0
900 RPM 1 1 1 0 1 0 1 0 0 0
1000 RPM 1 1 1 1 0 0 1 0 0 0
1100 RPM 0 1 1 1 1 0 0 1 0 0
1200 RPM 1 0 1 1 1 0 0 1 0 0
1300 RPM 1 1 0 1 1 0 0 1 0 0
1400 RPM 1 1 1 0 1 0 0 1 0 0
1500 RPM 1 1 1 1 0 0 0 1 0 0
1700 RPM 0 1 1 1 1 0 0 0 1 0
1800 RPM 1 0 1 1 1 0 0 0 1 0
1900 RPM 1 1 0 1 1 0 0 0 1 0
2000 RPM 1 1 1 0 1 0 0 0 1 0
2100 RPM 1 1 1 1 0 0 0 0 1 0
2200 RPM 0 1 1 1 1 0 0 0 0 1
2300 RPM 1 0 1 1 1 0 0 0 0 1
Tabel 3.1 Kombinasi port dalam penyalaan LED
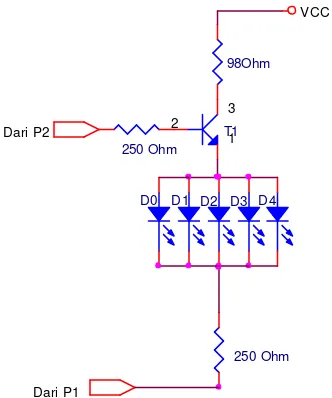
3.6 Penggerak LED
Arus keluaran dari mikrokontroler (15 mA sesuai data sheet) tidak cukup
kuat untuk menggerakan 5 buah LED sekaligus yang dipasang secara parallel
pada tiap baris dan kolom dari matrik LED. Sehingga pada perancangan ini
32
dapat bekerja dengan arus kolektor maksimal 1A (sesuai data sheet). Tentunya,
dengan arus sebesar itu dapat menyebabkan kerusakan pada mikrokontroler. Oleh
karena itu, dipasang transistor saklar dengan tipe yang sama pada katoda dari
matrik LED sebagai pengaman. Rangkaian penggerak LED dapat dilihat seperti
gambar 3.8 berikut:
VCC
250 Ohm T1
3 2
1
D0 250 Ohm
98Ohm
D1 D2 D3 D4
Dari P2
Dari P1
Gambar 3.8. Rangkaian penggerak LED
Dengan menggunakan persamaan 2.8 diatas maka dapat VRC:
VRC = 12V – 0,5V – 1,7V
= 9.8V
Besarnya hambatan kolektor Rc yang digunakan dalam perancangan ini adalah 98
ohm.
Maka besarnya tegangan Vc didapat sebesar:
VC = Vcc – VRC
VC = 12 V – 9.8 V
33
Tegangan VB adalah tegangan yang berasal dari port 1 I/O
mikrokontroler. Dari data sheet diketahui tegangan keluaran minimumnya sebesar
0,9 VCC. Bila VCC = 5V maka besarnya VB adalah 4,5V dan nilai RB sebesar:
V VRb=4,5−0,7=3.8
Ib VRb
Rb =
Rb= 253,33 ?
Nilai hambatan basis RB yang digunakan adalah 330 ohm untuk menjadi
transistor dalam kondisi saturasi saat tegangan port I/O mikrokontroler pada
keadaan minimum. Dibawah ini dapat dilihat gambar rangkaian penggerak LED
lengkap.
Untuk tegangan emiter besarnya adalah:
VE = IE . RE
VE = 15,05 mA . 250 Ohm
VE = 3,76 V
Maka didapat tegangan VRE sebesar:
VRE = VE – VLED
VRE = 3,76 V – 1,7 V
VRE = 2,06V
Pada gambar dibawah port 2.0 sampai dengan port 2.4 dihubungkan
dengan bagian kaki basis dari transistor BD139 yang kemudian kaki emiternya
34
dihubungkan juga dengan kaki basis transistor BD139, dan kaki kolektornya
dihubungkan ke bagian R dari dot matrik.
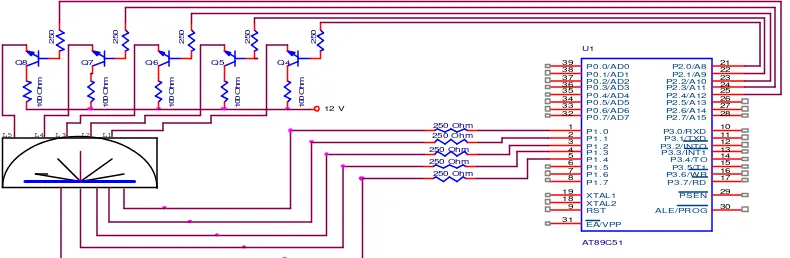
12 V U1 AT89C51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 PSEN ALE/PROG EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 Q4 250 100 Ohm 250 Q5 Q6 100 Ohm Q7 100 Ohm 250 100 Ohm 250 100 Ohm Q8 250 250 Ohm 250 Ohm 250 Ohm 250 Ohm 250 Ohm
L4 L3 L2 L1 L5
Gambar 3.9 Rangkaian Lengkap Penggerak LED
3.7Tombol Start/ Reset dan Stop
Kedua tombol start/reset, stop pada gambar dibawah ini digunakan
untuk pengaturan pengoperasian alat. Saat alat mendapatkan tegangan catu maka
tombol siap untuk dipergunakan. Tombol start ditekan maka proses pengukuran
dimulai diamana LED akan mulai bergerak sampai tombol stop ditekan. Tombol
stop untuk menghentikan proses pengukuran dan menampilkan data pengukuran
terakhir. Tombol reset akan membuat tampilan kembali kepada tampilan semula.
VCC 5 V VCC U1 AT89C51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 PSEN ALE/PROG EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0/A8 P2.1/A9 P2.2/A10 P2.3/A11 P2.4/A12 P2.5/A13 P2.6/A14 P2.7/A15 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3 P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 10 KOhm START 1 2 10 uF 10 KOhm STOP 1 2 10 uF 33 pF 33 pF 12 MHz 4,7 uF 8K2
35
3.8Skala
Pada perancangan ini skala yang digunakan yaitu100, 200, 300, 400,
500, 600, 700, 800, 900, 1000, 1100, 1200, 1300, 1400, 1500, 1600, 1700, 1800,
1900, 2000, 2100, 2200, 2300.
Pada saat motor mulai berbutar maka LED sebagai tampilan akan
menunjukkan posisi kecepatan motor. Jika pada saat kecepatan motor pada
kecepatan 150 rpm maka LED akan menyala pada angka 100.
3.9Perancangan Perangkat Lunak
Setelah mendapatkan gambaran tentang perangkat kerasnya, maka
perangkat lunak akan dibuat menyesuiakan perangkat kerasnya. Perangkat
lunaknya merupakan susunan program yang berbasis pada bahasa pemerograman
khusus mikrokontroler AT89C51. program ini akan dibagi menjadi dua bagian
yaitu program utama dan routine penangan interupsi, yang didukung oleh
routine-routine pengambilan data, routine-routine delay, routine-routine pengolahan data, routine-routine
perkalian, routine ubah bentuk ketampilan LED untuk menampilkan hasil
pengukuran.
3.9.1 Program Utama
Program utama merupakan bagian yang dikerjakan saat mikrokontroler
diberi catu daya. Program dimulai dengan proses inisialisasi antara lain dalah
inisialisasi alamat data dan inisialisasi mode timer/counter yang digunakan. Untuk
36
sebagai alamat penyimpanan data yang akan digunakan untuk proses berikutnya.
Kemudian dilakukan proses pengukuran, yaitu data masukan discounter selama 1
detik. Setelah 1 detik kecepatan dapat dihitung dengan proses perkalian anatara
hasil counter dengan pengalinya. kemudian hasilnya akan ditamplkan sebagai
kecepatan motor dalam rpm. Langkah selanjutnya, program akan membaca
tombol star/stop. jika tombol tersebut ditekan maka program akan menghentikan
proses pengukuran, dan akan menampilkan nilai rpm yang terakhir. Pada saat ini
program akan terus membaca tombol star/stop, jika pada saat yang diinginkan
tombol ditekan, maka program akan kembali melakukan proses pengukuran. Jika
tombol reset ditekan maka program akan menolkan tampilan, dan melakukan
37
Tombol start ditekan?
Mulai
T
Y
T
Y
Y T
Gambar 3.11. Diagram alir Program Utama
Inisialisasi alamat data Inisialisasi Timer/Counter
Hitung jumlah pulsa utama
Tampilkan RPM Hitung RPM
Tombol stop ditekan?
Tahan Nilai RPM
Tampilkan RPM
Tombol reset?
38
3.9.2 Diagram Alir Perhitungan Rpm
Karena jumlah celah (n) = 10, maka persamaan 2.3 tersebut dapat
disederhanakan menjadi
rpm = p x 6
Proses perhitungan rpm pada program adalah sebagai berikut:
1. Simpan pengali = 6
2. Data yang dimasukkan dicuplik selama 1 detik menggunakan timer.
3. Data yang sudah dicuplik oleh timer dihitung denga n proses counter sehingga
diperoleh jumlah pulsa (p)
4. Dengan proses perkalian, jumlah pulsa dikalikan dengan pengali dan hasilnya
dapat dikonversikan ke bentuk desimal serta ditampilkan sebagai kecepatan
39
Berikut ini adalah gambar alir proses perhitungan rpm:
T Y
Y
Gambar 3.12. Diagram alir proses perhitungan RPM Mulai
Simpan pengali = 6
Baca Data Masukan
Waktu =1 detik
?
Counter sebagai jumlah pulsa (p)
Kalikan Counter dengan Pengali
Tampilkan sebagai RPM
40
3.9.3 Proses Perkalian
Pada proses perhitungan rpm, dibutuhkan proses perkalian yaitu
perkalian antara pengali dengan jumlah pulsa yang sudah dihitung dalam setiap
detiknya. Setiap suatu bilangan dengan besar 32 bit akan menggunakan operasi
dasar perkalian 32 bit yang melibatkan penambahan. Proses perkalian dua buah
bilangan pada program adalah dengan menggunakan metode tambah dan geser.
suatu bilangan digeser kekanan dan yang lain digeser kekiri. Jika LSB pada
bilangan yang digeser kekanan bernilai 0 maka hasil kali dengan pengali tidak
ditambah, sebaliknya jika bernilai 1 maka akan ditambah. Proses perkalian akan
selesai jika bilangan yang digeser kekanan bernilai 0000.
Jika X3 X2 X1 X0 digeser kekanan akan menjadi X4 X3 X2 X1 X0,
dimana X0 adalah LSB yang telah tergeser kekanan, dan yang menentukan adalah
apakah pengali akan ditambah dengan hasil kali atau tidak. berikut disajikan
contoh perkalian bilangan biner 4 bit.
Bentuk desimalnya 6 x 12 = 72
Pengali (N) = 6 bentuk bilangan binernya 0110
Jumlah pulsa tiap detik (P) = 12 bentuk bilangan binernya 1100
Xo =LSB yang telah tergeser kekanan
41
Maka proses perkalian dengan metode tambah dan geser adalah sebagi berikut:
P N Xo HK
Keadaan awal 0110 1100 0 0000
N geser kanan 0110 0 0000
P geser kiri 1100
N geser kanan 0011 0 0000
P geser kiri 11000
N geser kanan 0001 1 0000
Xo= 1 0000 +
HK = HK + P 11000 0001 1 11000
P geser kiri 110000
N geser kanan 0000 1 11000
Xo= 1 11000 +
HK= HK + P 1001000
42
Gambar ini penjelasan proses perkalian menggunakan diagram alir
T
Y
T
Y
Gambar 3.13. Diagram alir proses Perkalian Mulai
Hasil register hasil bagi
Isi R0 dengan Pengali Isi A dengan Operand
RRC R0 RLC A
Carry R0 = 1 detik
?
Hasil Kali = Hasil Kali + A
R0 = 0 ?
43
3.9.3 Pencuplikan Data Selama Satu Detik
Pada perancangan program akan menggunakan Timer dan counter mode
1. Timer akan digunakan untuk mencuplik data selama 1 detik, sedangkan counter
akan mencacah data tersebut. Hasil cacahhan tersebut yang kemudian akan
diproses menjadi besaran kecepatan. berikut diagaram alir menentukan timer 1
detik
T Y
Y
Gambar 3.14. Diagram alir Timer satu detik Mulai
Selesai Cacah = 20
Isi Timer 50ms
Cacah= 0 ?
44
3.9.5 Proses Tampilan
Pada proses tampilan LED, maka digunakan P3.5 untuk menghidupkan
LED sedangkan P3.6 untuk mematikan LED
Y
Gambar 3.15 Diagram Alir Penampil LED Start
Baca isi port 3 dan simpan di akumulator
(A<-P3)
Register 0 =FEH? Akumulator
= FeH?
Hidupkan LED (P1<-0) Status LED Mati
(R0<-0)
Matikan LED (P1<-0)
Baca isi port 3 dan simpan di akumulator
(A<-P3)
Isi akumulator
45
BAB IV
HASIL PENGAMATAN DAN PEMBAHASAN
Pada bab ini akan dibahas tentang hasil akhir perancangan dan hasil
pengamatan pengukuran terhadap rangkaian-rangkaian elektronis (rangkaian
sensor dan rangkaian penggerak) yang merupakan implementasi dari sistem secara
keseluruhan yang telah dirancang. Berikut ini akan disajikan pembahasan
mengenai tiap-tiap bagian.
4.1 Hasil Akhir Perancangan
Hasil akhir perancangan sistem ini terdiri dari dua bagian utama, yaitu: (1)
Bagian mekanik yang memberi data-data masukan, (2) Bagian penampil yang
terdiri dari rangkaian penggerak dan rangkaian LED.
Bagian mekanik terdiri dari piringan (encoder), satu buah sensor
optocoupler yang menghasilkan data-data masukan mengenai perubahan
kecepatan motor ke mikrokontroler. Piranti keluaran atau penampil, memuat
rangkaian pemicu Schmitt, mikrokontroler dan rangkaian penggerak LED. Pada
bagian depan penampil terdapat 115 buah LED yang dirancang sedemikian rupa
sehingga deretan LED-nya membentuk garis yang menyerupai jari- jari. Garis
yang dibentuk sebanyak 23 buah dan setiap garis dibentuk dengan LED sebanyak
5 buah yang dipasang secara parallel. Koneksi antara komponen-komponen dari
46
Gambar 4.1 Rangkaian catu daya
Gambar 4.1 adalah rangkaian catu daya 5 V dan 12 V, rangkaian tersebut
terdiri dari trafo, kapasitor polar, regulator, dioda bridge penyearah. Catu daya ini
berfungsi untuk memberikan tegangan DC yang dibutukan oleh mikrokontroler
AT89C51 sebesar 5 V. Sedangkan Catu daya 12 V digunakan untuk
menggerakkan LED penampil.
Gambar 4.2 Rangkaian mikrokontroler
Gambar 4.2 merupakan rangkaian sensor, rangkaian mikrokontroler, dan
rangkaian penggerak LED. Keluaran dari rangkaian sensor akan masuk ke dalam
port 3 di mikrokontroler, kemudian keluaran dari mikrokontroler berada di posisi
47
Gambar 4.3 Motor, encoder, dan tampilan LED
Gambar 4.3 adalah motor DC 12 V, encoder, dan tampilan LED. Putaran
pada kepala motor DC dipasang encoder yang berfungsi untuk mengkodekan
tegangan bagi optocoupler, sedangkan tampilan LED menunjukkan hasil dari
putaran motor DC tersebut.
Gambar 4.4 Tombol Start/Reset dan Stop
Gambar 4.4 adalah tombol start/reset dan stop. Tombol start akan
berfungsi pada saat memulai pengukuran, sedangkan tombol reset akan
mengembalikan tampilan pada keadaan semula. Tombol stop akan membuat
tampilan berhenti pada saat yang diinginkan.
48
4.2 Contoh Tampilan LED
Pada bagian ini akan diperlihatkan beberapa contoh tampilan pada
penampil LED dari hasil perancangan. Seperti diketahui, bahwa setiap garis dari 5
buah LED yang dipasang paralel pada papan penampil mewakili satu posisi dari
kecepatan motor dan besarnya perubahan (resolusi) adalah mengikuti skala.
Gambar 4.5 Tampilan LED pada posisi 600 Rpm
Gambar 4.5 merupakan tamplan pada saat putaran motor berada pada posisi 550
Rpm sampai pada 650 Rpm.
Gambar 4.6 merupakan tampilan pada saat 2000 Rpm, dimana LED akan
menyala jika putaran motor dc di 1950 Rpm sampai pada 2500 Rpm
49
Tabel 4.1 Perbandingan pengukuran dengan Tachometer
NO Pengukuran dengan Tachometer/Rpm
Posisi LED Ket
1 100 100
2 150 100
3 202 100 *
4 204 200
5 260 200
6 306 200 *
7 308 300
8 345 300
9 408 300 *
10 412 400
11 467 400
12 509 400 *
13 511 500
14 556 500
15 614 500 *
16 616 600
17 634 600
18 717 600 *
19 719 700
20 764 700
21 821 700 *
22 822 800
23 867 800
24 925 800 *
25 928 900
26 975 900
27 1035 900 *
28 1037 1000
29 1085 1000
30 1139 1000 *
31 1141 1100
32 1190 1100
33 1242 1100 *
34 1245 1200
35 1280 1200
36 1346 1200 *
37 1347 1300
38 1398 1300
39 1447 1300 *
40 1450 1400
50
NO Pengukuran dengan Tachometer/Rpm
Posisi LED Ket
42 1550 1400 *
43 1553 1500
44 1597 1500
45 1655 1500 *
46 1656 1600
47 1711 1600 *
48 1757 1600 *
49 1759 1700
50 1802 1700 *
51 1860 1700 *
52 1861 1800
53 1904 1800 *
54 1962 1800 *
55 1964 1900
56 1995 1900
57 2065 1900 *
58 2067 2000
59 2120 2000 *
60 2167 2000 *
61 2170 2100
62 2216 2100 *
63 2259 2100 *
64 2273 2200
65 2315 2200 *
66 2375 2200 *
67 2376 2300
68 2390 2300
69 4000 2300
Ket: * : Hasil tampilan LED tidak sesuai dengan rancangan
Dari hasil pengukuran Tachometer seperti tabel 4.1 maka didapati ada
ketidaksesuaian antara hasil pengukur an dengan hasil yang diinginkan. Misalnya
pada pengukuran no 9, pengukuran yang diperoleh adalah 408 Rpm, tetapi hasil di
tampilan LED pada 300 Rpm padahal seharusnya 400 Rpm. Untuk no 47 dan 48
pengukuran yang diperoleh adalah 1711 dan 1757 tetapi tampilan LED di 1600
Rpm padahal seharusnya 1700 Rpm. Selain itu titik-titik kritis alat ini tidak
51
putaran motornya digunakan catu daya variabel yang tidak mampu menggerakkan
motor secara linier setiap 1 Rpm. Tegangan yang dihasilkan catu daya variable
tersebut menghasilkan putaran motor tidak linier. Untuk titik kritis perubahan
posisi tampilan LED tidak dapat diamati, sehingga range pengukuran tidak dapat
ditentukan dengan pasti. Range yang didapat untuk menghidupkan tampilan setiap
100 Rpm dapat dilihat seperti tabel 4.2
Tabel 4.2 Putaran motor dengan posisi LED
Putaran Motor (Rpm) Posisi LED Yang Hidup(Rpm)
0-202 100
204-306 200
308-408 300
402-509 400
511-614 500
616-717 600
719-821 700
822-925 800
928-1035 900
1037-1139 1000
1141-1242 1100
1245-1346 1200
1347-1447 1300
1450-1550 1400
1553-1655 1500
1656-1757 1600
1759-1860 1700
1861-1962 1800
1964-2065 1900
2067-2167 2000
2170-2259 2100
2273-2375 2200
52
4.3 Pembahasan Rangkaian Elektronik
Pengukuran dilakukan terhadap rangkaian sensor optocoupler dan
rangkaian penggerak LED. Pada rangkaian sensor pengukuran dilakukan terhadap
tegangan keluaran (Vce) dan arus kolektor (Ic) fototransistor, sedangkan untuk
rangkain penggerak LED pengukuran dilakukan terhadap arus basis (Ib) dan arus
kolektor (Ic) transistor BD 139. Pengukuran ini dimaksudkan untuk mengetahui
apakah nilai- nilai besarnya sesuai dengan yang diharapkan dalam perancangan.
4.3.1 Rangkaian Sensor Optik
Sebagaimana diketahui bahwa rangkaian sensor optik terdiri dari dua
bagian: bagian: bagian pemancar dan bagian penerima. Pada rangkaian sensor ini,
pengukuran dilakukan terhadap besarnya tegangan kolektor-emiter (Vce) dan kuat
arus yang melewati kolektor (Ic) dari fototransistor sebagai penerima sebelum
diterima oleh rangkaian pemicu Schmitt. Hasil pengukuran terhadap keluaran
rangkaian sensor pada saat fototransistor dalam keadaan tak terhalang dan
terhalang dapat dilihat di tabel 4.2
Tabel 4.3 Hasil pengukuran terhadap Fototransistor
Fototransistor Vce terhalang
Vce tak terhalang
Ic terhalang Ic tak terhalang
Q1 4,90 0,11 0 0,12
Dari tabel 4.2 terlihat bahwa tegangan keluaran (Vce) foto transistor saat
terhalang adalah 4,90 V dan pada saat tidak terhalang adalah 0,11 V sedangkan
53
0,2 V saat tidak terhalang perbedaan ini disebabkan oleh catu daya yang dirancang
menghasilkan tegangan keluaran sebesar 4,90 V. Perbedaan nilai tegangan
menurut pengukuran tidak jauh bebeda dengan perancangan. Perbedaan kedua
nilai tegangan antara saat terhalang dan tidak terhalang merupakan perbedaan
nilai tegangan yang diterima oleh pemicu Schmitt. Pada saat tegangan masukan
rendah (input low voltage) yang diteriam pemicu schmitt sehingga keluarannya
adalah kondisi tinggi (high). Jadi. Dengan demikian kondisi keluaran seperti ini
dapat dikatakan bahwa fototransistor berada dalam kondisi aktif (ON). Pada saat
tegangan masukan tinggi (input high voltage) yang diterima pemicu schmit
sehingga keluarannya dalam kondisi rendah (low). Kondisi keluaran seperti ini
yang diperlihatkan fototransistor dapat dikatakan dalam keadaan cut off atau off.
Sesuai hasil pengukuran, tegangan kelua ran pemicu Schmitt adalah 0,15 V
saat fototransistor ON, dan 4,90 V saat fototransistor OFF. Nilai- nilai tegangan
ini nantinya akan dibaca oleh mikrokontroler sebagai data-data masukan yang
kemudian diproses untuk ditampilkan.
Agar dapat dibaca oleh mikrokontorler tegangan masukan rendah (input
lowvoltage) minimum -0,5 V dan maksimal 0,8 V dan tegangan masukan tinggi
(input high voltage) minimum 3,5 V dan maksimum 5,5 V. Dengan demikian
tegangan keluaran pemicu Schmitt sebesar 0,15 V, saat fototransistor ON, sudah
dapat diakses oleh mikrokontroler sebagai input low voltage, dan tegangan
54
4.3.2. Rangkaian Transistor Sebagai Saklar
Untuk rangkaian penggerak seperti gambar 3.9 yang mengunakan BD 139
sebagai piranti utamanya, pengkuran dilakukan terhadap tengangan basis (Vb),
tegangan kolektor (Vc) dan tegangan emitor (Ve) saat transistor dalam kondisi
aktif. Besarnya nilai- nilai pengukuran tersebut dapat dilihat dalam tabel. 4.4
Tabel 4.4 Hail pengukuran terhadap transistor sebagai saklar
Transistor Vb(V) Vc(V) Ve(V)