ROBOT PENGANTAR MAKANAN DENGAN PENENTUAN POSISI MEJA MENGGUNAKAN LINE TRACER.
Teks penuh
Gambar
Dokumen terkait
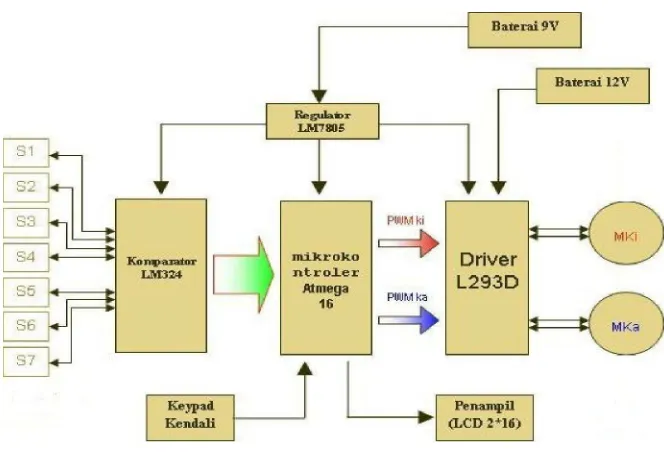
Line follower robot adalah sebuah robot yang dapat mengikuti garis yang didukung oleh rangkain komponen elektronika yang dilengkapi dengan roda dan.. digerakan
IMPLEMENTASI METODE RIGHT HAND TRACKING PADA ROBOT LINE TRACER. UNTUK MENCARI
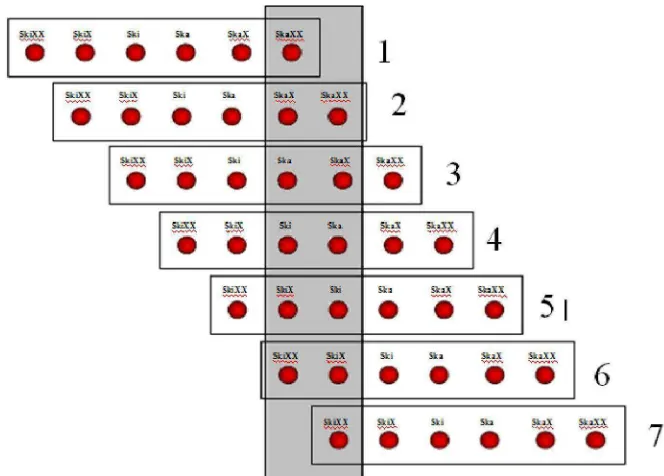
Nomor rak tersebut yang nantinya akan menjadi perintah pada robot untuk berjalan mengikuti lintasan atau garis menuju lokasi, dimana prinsip kerja alat ini sering disebut
Sistem robot hovercraft line follower memiliki respon yang mampu mempertahankan posisi setimbang saat mengikuti garis dengan menaikkan/ menurunkan kecepatan motor DC
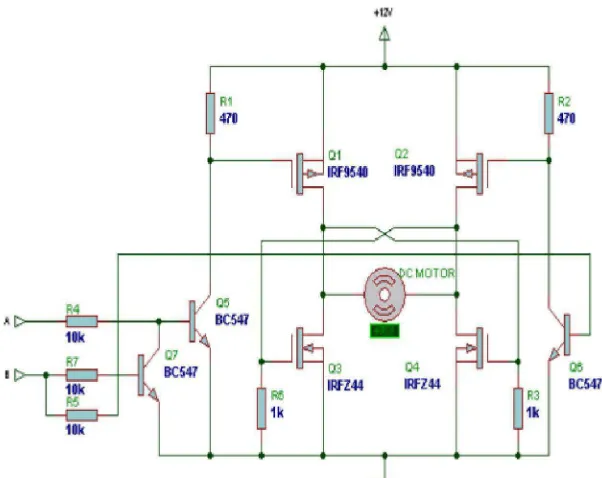
Pada umumnya robot line tracer dibuat dengan menggunakan tiga atau empat buah roda, dua buah roda belakang yang terhubung dengan motor DC berfungsi sebagai penggerak
Nomor rak tersebut yang nantinya akan menjadi perintah pada robot untuk berjalan mengikuti lintasan atau garis menuju lokasi, dimana prinsip kerja alat ini sering disebut
Pada umumnya robot line tracer dibuat dengan menggunakan tiga atau empat buah roda, dua buah roda belakang yang terhubung dengan motor DC berfungsi sebagai penggerak
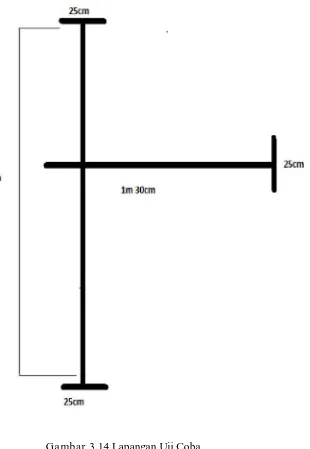
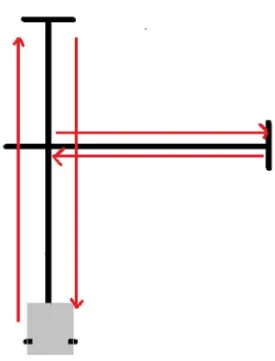
diperoleh dari kontroler yang digunakan Pengujian ini dilakukan dengan menjalankan line follower robot pada suatu garis lurus, dan posisi awal robot berada pada kondisi
