PROXIMITIF DAN HC-SR04 BERBASIS ARDUINO NANO
LAPORAN PROJEK AKHIR 2
LUTFI SAFIRA 172411051
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA MEDAN
2020
PROXIMITIF DAN HC-SR04 BERBASIS ARDUINO NANO
LAPORAN PROJEK AKHIR 2
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh gelar Ahli Madya
LUTFI SAFIRA 172411051
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA MEDAN
2020
HC-SR04 BERBASIS ARDUINO NANO
ABSTRAK
Rancang Bangun Alat Pemilah Sampah Logam dan Non Logam Otomatis Berasis Arduino berguna untuk memilah sampah sehingga mempermudah dalam mendaur ulang sampah.
Komponen utama dari alat ini terdiri dari Arduino sebagai sistem control dari alat ini, sensor Proximity sebagai pendeteksi sampah logam, Motor Servo sebagai penggerak penghalang untuk memisahkan sampah Logam dan LCD untuk menampilkan jenis sampah Logam. Dalam hal pemilahan sampah sensor proximity yang akan mendeteki sampah tersebut, apabila sampah tersebut terdeteksi sampah Logam maka Motor Servo akan menggerakan peghalang ke kanan dan mengarahkan sampah untuk mauk kedalam tong sampah khusus Logam dan LCD akan menampilkan jenis sampah logam, dan apabila sensor Proximity tidak mendeteksi sampah logam maka Motor Servo akan menggerakan penghalang lurus dan sampah non logam masuk ke dalam tong khusus sampah non logam.
Pemilah sampah ini sangat membantu dalam hal mengurangi sampah karena sampa dapat di olah sesuai dengan jenisnya.
Kata Kunci: Arduino, Sensor Proximity, Servo Motor
ABSTRACT
Design of device sorting metal waste material and non metal waste automatic use Arduino for easy to sorting waste and recycle. Main tools of this circuit are Arduino as main control system, proximity sensor as metal waste detector, servo motor for control to sorting metal waste, and LCD for information kind of waste metal. The system work is Proximity sensor will be detection a waste come, if metal waste detection so Servo Motor will be running to sorting metal waste into wastebasket special metal and LCD will show kind of the metal waste and than if proximity sensor not detection metal waste so servo motor stand by on the middle and waste non metal enter into wastebasket special non metal. The device of sorting waste is very help to reduce waste because the waste can recycle of kind the waste.
Keywords: Arduino, Proximity Sensor, Motor Servo
Puji dan syukur penulis ucapkan kepada Allah SWT, dengan limpahan rahmat dan karunia- Nya penulis dapat menyelesaikan penyusunan laporan tugas akhir 2 ini. Laporan Tugas Akhir 2 ini berjudul ”Rancang Bangun Sistem Alat Pemilah Sampah Logam dan Nonlogam dengan Menggunakan Sensor Kapasitif Proximitif dan HC-SR04 Berbasis Arduino Nano”. Dalam penyusunan Tugas Akhir 2 ini penulis tidak dapat lepas dari dukungan berbagai pihak. Oleh sebab itu pada kesempatan ini penulis ingin memberikan rasa hprmat dan mengucapkan terima kasih kepada.
1. Dr. Kerista Sebayang, MS selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Ibu Dr. Diana Lemin Barus, M.Sc selaku Ketua Program Studi D3 Metrologi dan Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
3. Bapak Juneidi Ginting, S.Si, selaku Sekretaris Program Studi D3 Metrologi dan Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara dan juga selaku dosen penguji yang telah mengarahkan kepada penyesuaian Laporan Tugas Akhir 2.
4. Bapak Prof. Dr. Nasruddin MN, M.Eng,Sc selaku Dosen Pembimbing yang telah membimbing dan mengarahkan kepada penulis dalam menyelesaikan Laporan Tugas Akhir 2 ini.
5. Kakak Putri, Kakak Vera, Abang Hendro, Lika Lorensa Purba, Mutia Novita Sari, Amelia Oktavia Silaen dan kakak senior yang senantiasa membantu dan memberikan semangat kepada penulis.
Dari pembaca yang bersifat membangun dalam penyempurnaan Tugas Akhir ini. Semoga hasil penelitian ini bermanfaat bagi pembaca khususnya dan perkembangan dunia teknologi. Penulis menyadari sepenuhnya bahwa dalam pembuatan Projek Akhir 2 ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran.
PERNYATAAN ORISINALITAS i
PENGESAHAN PROJEK AKHIR 2 ii
ABSTRAK iii
ABSTRACT iv
KATA PENGHARGAAN v
DAFTAR ISI vii
DAFTAR GAMBAR x
DAFTAR TABEL xi
DAFTAR LAMPIRAN xii
BAB 1 PENDAHULUAN 1
1.1. Latar Belakang 1
1.2. Rumusan Masalah 2
1.3. Batasan Masalah 2
1.4 Tujuan 2
1.5 Manfaat 2
1.6 Sistematika Penulisan
3
BAB 2 TINJAUAN PUSTAKA 4
2.1. Limbah Logam dan Nonlogam 4
2.2. Arduino 7
2.2.1. Pengertian Arduino 7
2.2.2. Hardware 8
2.2.2.1 Arduino Nano 8
2.2.2.2 Arduino Software (IDE) 9
2.2.2.3 Pengertian Arduino Software (IDE) 9
2.2.2.4 Menulis Sketch 9
2.3 LCD 14
2.5 Motor Servo 18
2.6 HC-SR04 20
2.7 Sensor Kapasitive Proximity 23
BAB 3 METODOLOGI PENELITIAN 25
3.1 Metode Penelitian 25
3.2 Perancangan Sistem 26
3.2.1 Fungsi Tiap Blok 26
3.3 Rangkaian Catu Daya 27
3.4 Rangkaian Penstabil Tegangan (Regulator) 27
3.5 Rangkaian LCD (Liquid Crystal Display) 28
3.6 Rangkaian Sensor Kapasitif Proximity 29
3.7 Rangkaian Sensor HC-SR04 29
3.8 Rangkaian Sensor Motor Servo 30
3.9 Rangkaian Keseluruhan Sistem 30
3.10 Flowchart System 31
3.10.1 Algoritma Flowchart System
32
BAB 4 HASIL DAN PEMBAHASAN 33
4.1 Pengujian Rangkaian Regulator 33
4.2 Pengujian Rangkaian Arduino Nano 33
4.3 Pengujian Display LCD 34
4.4 Hasil Pengujian Sensor Kapasitif Proximity dan HC-SR04 35
4.5 Pengujian Hardware 36
4.6 Uji Coba Perangkat 36
4.6.1 Pengujian Downloader Programmer 37
4.7 Hasil Pengujian Perangkat Hardware 37
4.8 Hasil Pengujian 37
5.2. Saran 38
DAFTAR PUSTAKA 39
LAMPIRAN 40
Nomor Gambar
Judul Halaman
Gambar 2.1 Arduino Nano 8
Gambar 2.2 Tampilan dari Software Arduino IDE 10
Gambar 2.3 LCD 15
Gambar 2.4 Adaptor 15
Gambar 2.5 Motor Servo 19
Gambar 2.6 Pulsa 20
Gambar 2.7 Prinsip Kerja Sensor Ultrasonik 22
Gambar 2.8 Sensor HC-SR04 23
Gambar 2.9 Sensor Kpatitif Proximity 24
Gambar 3.1 Tahapan-tahapan Pengujian 25
Gambar 3.2 Diagram Blok Rangkaian 26
Gambar 3.3 Rangkaian Catu Daya 27
Gambar 3.4 Rangkaian Regulator 28
Gambar 3.5 Rangkaian LCD 28
Gambar 3.6 Rangkaian Sensor Kapasitif Proximity 29
Gambar 3.7 Rangkaian Sensor HC-SR04 29
Gambar 3.8 Rangkaian Motor Servo 30
Gambar 3.9 Rangkaian Keseluruhan Sistem 31
Gambar 3.11 Flowchart Sistem 31
Gambar 4.1 Tegangan Output Ic Regulator 7805 33 Gambar 4.2 Informasi Signature Mikrokontroler Arduino nano 34
Gambar 4.3 Keseluruhan dari Hardware 36
Gambar 4.4 Sistem Rangkaian Alat 37
Gambar 4.5 Hasil Pengujian Alat dengan Samapah Logam Gambar 4.5 Hasil Pengujian Tampilan Status Sampah
38 38
DAFTAR TABEL
Nomor Tabel
Judul Halaman
Tabel 4.1 Symbol dan Fungsi dari Toolbar Software Arduino IDE 33
Tabel 4.2 Pengukuran pin IC LCD 35
Tabel 4.3 Hasil Pengujian Sensor Kapasitif Proximity dan Sensor HC-SR04 36
Nomor Lampiran
Judul Halaman
1 Data Sheet 40
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Sampah adalah suatu material yang tidak lagi dipakai sehingga dibuang oleh pemiliknya, akan tetapi sampah masih dapat digunakan jika didaur ulang menjadi sesuatu yang baru (Basriyanti). Sampah dibagi menjadi dua kategori, yaitu sampah kategori organic dan sampah kategori anorganik. Sampah organic merupakan sampah yang dapat terurai oleh mikroorganisme dan dapat membusuk, sedangkan sampah anorganik merupakan sampah yang sulit terurai karena mengandung bahan logam (kaleng, baterai dan besi) dan non logam (plastic dan kertas). Banyaknya mini market yang menyediakan sitting area atau menyediakan tempat duduk dan fasilitas wifi sehingga pelanggan yang habis belanja bias bersantai dan berkumpul bersama teman-teman sambal makan dan minum di tempat. Banyak sampah kaleng maupun botol dan plastic yang dibuang tidak pada tempatnya atau tercampur pada satu kontak sampah, dari pihak mini market hanya menyediakan satu kontak sampah saja. Rendahnya kesadaran pelanggan soal membuang sampah dan ketidak tahuan masyarakat dari kategori sampah yang dibuang sembarangan akan menjadi ancaman bagi kehidupan masyarakat, seperti mengakibatkan banjir, kotornya lingkungan, dan menjadikan lingkungan tidak indah untuk dipandang mata, polusi udara, dan sebagainya. Limbah Logam Berat atau heavy metal termasuk golongan limbah B3 limbah yang mengandung logam berat adalah issur lingkungan yang menjadi perhatian banyak pihak, utamanya bagi industri-industri di tanah air. Masalah limbah logam berat sangat serius diperhatikan mengingatkan dampak yang ditimbulkannya begitu nyata bagi kehidupan makhluk hidup, termasuk manusia.
Untuk itulah kami membangun tempat sampah pemilah secara otomatis untuk memilah dan mendeteksi sampah logam (tembaga dari kabel,baut besi, kaleng minuman) dan nonlogam (contohnya kertas, botol plastik dan karet), dengan sensor kapasitive proximity, kapasitive induktif dan arduino nano sebagai mikrokontroler. Sistem ini memiliki kelebihan yaitu dapat memisahkan sampah yang berbahan dasar logam dengan sampah yang tidak mengandung logam dengan motor servo sebagai penggeraknya.
memberikaninformasi konsentrasi gas, agar dapat selalu diamati oleh penggeraknya dan lcd 16 x 2 untuk menampilkan informasi antara sampah logam dan sampah nonlogam.
1.2. RumusanMasalah
Permasalahan utama pada pembuatan:
1. Bagaimana mengimplementasi mikrokontroller Arduino Nano pada sistem pendeteksi sampah logam dan nonlogam.
2. Bagaimana cara kerja sensor kapasitive proximity untuk mendeteksi sampah logam dan sampah nonlogam.
1.3. Batasan Masalah
Dalam perencanaan penulisan ini terdapat beberapa batasan masalah sebagai berikut:
1. Rangakaian Mikrokontroller yang di gunakan adalah mikrokontroller Arduino Nano.
2. Sistem berbasis mikrokontroller Arduino Nano yang bertugas mengatur seluruh kegiatan sistem yang dirakit.
3. Nilai keluaran sensor ditampilka pada lcd 16x2.
4. Sensor yang digunakan adalah Sensor kapasitive proximity.
1.4. Tujuan Penulisan
Adapun Tujuan dari penulisan tugas akhir ini sebagai berikut :
1. Memanfaatkan sensor kapasitive proximity sebagai sensor pendeteksian sampah logam dan sampah nonlogam.
2. Mengaplikasikan Mikrokontroler Arduino Nano sebagai pusat kontrol dalam sistem elektronika.
3. Mencegah terjadinya sampah logan dan nonlogam tercampur 1.5 Manfaat Penelitian
Adapun manfaat dari penelitian ini sebagai berikut:
1. Dapat membuat Rancang Bangun Implementasi Mikrokontroller Pemilah Sampah Logam Dan Nonlogam Pada Tempat Sampah. j
2. Mikrokontroler Arduino Nano digunakan sebagai otak pada sistem elektronika pada rancangan alat.
3. Dengan perancangan alat ini diharapkan dapat membantu menisahkan sampah logam dan nonlogam pada tempat sampah.
1.6 Sistematika Penulisan
Untuk mempermudah pembahasan dan penulisan laporan ini, penulis membuat susunan bab – bab yang membentuk laporan ini dalam sistematika penulisan laporan dengan urutan sebagai berikut :
BAB 1 PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, tujuan penulisan, batasan masalah, metode penulisan, serta sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian dan bahasa program yang digunakan, serta karakteristik dari komponen-komponen pendukung.
BAB III PERANCANGAN DAN PEMBUATAN
Bab ini berisikan tentang proses perancangan dan pembuatan alat. Mulai dari perancangan dan pembuatan sistem secara hardware atau software.
BAB IV HASIL DAN PEMBAHASAN
Dalam bab ini berisikan hasil pengujian pada alat dan pembahasan pada alat BAB V PENUTUP
Bab ini menjelaskan kesimpulan dan memberikan dari hasil pengujian
BAB 2
TINJAUAN PUSTAKA
2.1 Limbah Logam dan Non Logam
Limbah Logam Berat atau heavy metal termasuk golongan limbah B3. Limbah yang mengandung logam berat adalah issue lingkungan yang menjadi perhatian banyak pihak, utamanya bagi industri-industri di tanah air. Masalah limbah logam berat sangat serius diperhatikan mengingat dampak yang ditimbulkannya begitu nyata bagi kehidupan makhluk hidup, termasuk manusia. Beberapa kegiatan industri di tanah air saat ini masih mencari cara untuk mereduksi dampak negatif dari logam berat, berbagai cara sudah dilakukan, namun masih belum maksimal. Selain karena teknologi yang kurang tepat guna, teknologi yang ada masih tergolong mahal. Beberapa literatur tentang logam berat, salah satunya menurut Vouk (1986) yang mengatakan bahwa terdapat 80 jenis dari 109 unsur kimia di muka bumi ini yang telah teridentifikasi sebagai jenis logam berat.
Berdasarkan sudut pandang toksikologi, logam berat ini dapat dibagi dalam dua jenis.
Logam ferro adalah suatu logam paduan yang terdiri dari campuran unsur karbon dengan besi. Untuk menghasilkan suatu logam paduan yang mempunyai 2 sifat yang berbeda dengan besi dan karbon maka dicampur dengan bermacam logam lainnya. Logam adalah elemen kerak bumi (mineral) yang terbentuk secara alami. Jumlah logam diperkirakan 4% dari kerak bumi. Logam dalam bidang keteknisian adalah besi. Biasanya dipakai untuk konstruksi bangunan-bangunan, pipa-pipa, alat-alat pabrik dan sebagainya.
Contoh dari logam yang sudah memiliki sifat-sifat penggunaan teknis tertentu dan dapat diperoleh dalam jumlah yang cukup adalah besi, tembaga, seng, timah, timbel nikel, aluminium, magnesium. Kemudian tampil logam-logam lain bagi penggunaan khusus dan paduan, seperti emas, perak, platina, iridium, wolfram, tantal, molybdenum, titanium, vokalt, anti monium (metaloid), khrom, vanadium, beryllium, dan lain-lain.
Logam adalah unsur kimia yang mempunyai sifat-sifat, yaitu : a) Dapat ditempa dan diubah bentuk
b) Penghantar panas dan listrik
c) Keras (tahan terhadap goresan, potongan atau keausan), kenyal (tahan patah bila dibentang), kuat (tahan terhadap benturan, pukulan martil), dan liat (dapat ditarik).
Yang dimaksud besi dalam bidang keteknisan adalah besi teknis, bukan besi murni, karena besi murni (Fe) tidak memenuhi pernyataan teknik, persyaratan teknik adalah kekuatan bahan, keuletan, dan ketertahanan terhadap pengaruh luar (korosi, aus, bahan kimia, suhu tinggi dan sebagainya).
Besi teknis selalu tercampur dengan unsure-unsur lain misalnya karbon (C), silicon (Si), mangan (Mn), Fosfor (P), dan belerang (S). Unsur-unsur tersebut harus dalam kadar tertentu, sesuai dengan sifat-sifat yang dikehendaki, secara garis besar besi teknik terbagi menjadi :
a. Besi kasar : kadar karbon lebih besar dari 3,5%, tidak dapat ditempa.
b. Besi : kadar karbon lebih besar dari 2,5%, tidak dapat ditempa.
c. Baja : kadar karbon kurang dari 1,7%, dapat ditempa.
Jenis pertama adalah logam berat esensial, di mana keberadaannya dalam jumlah tertentu sangat dibutuhkan oleh organisme hidup, namun dalam jumlah yang berlebihan dapat menimbulkan efek racun. Contoh logam berat ini adalah Zn, Cu, Fe, Co, Mn dan lainsebagainya. Sedangkan jenis kedua adalah logam berat tidak esensial atau beracun, di mana keberadaannya dalam tubuh masih belum diketahui manfaatnya atau bahkan dapat bersifat racun,seperti Hg, Cd, Pb, Cr dan lain-lain. Logam berat ini dapat menimbulkan efek kesehatan bagi manusia tergantung pada bagian mana logam berat tersebut terikat dalam tubuh. Daya racun yang dimiliki akan bekerja sebagai penghalang kerja enzim, sehingga proses metabolisme tubuh terputus. Lebih jauh lagi, logam berat ini akan bertindak sebagai penyebab alergi, mutagen, teratogen atau karsinogen bagi manusia.
Jalur masuknya adalah melalui kulit, pernapasan dan pencernaan. Menurut Nordberg., et. al (1986) logam berat jika sudah terserap ke dalam tubuh maka tidakdapat dihancurkan tetapi akan tetap tinggal di dalamnya hingga nantinya dibuang melalui prosesekskresi. Hal serupa juga terjadi apabila suatu lingkungan terutama di perairan telah terkontaminasi (tercemar) logam berat maka proses pembersihannya akan sulit sekali dilakukan. Kontaminasi logam berat ini dapat berasal dari faktor alam seperti kegiatan
gunung berapi dankebakaran hutan atau faktor manusia seperti pembakaran minyak bumi, pertambangan, peleburan, proses industri, kegiatan pertanian, peternakan dan kehutanan, serta limbah buangantermasuk sampah rumah tangga. Hingga saat ini, limbah kimia bahan beracun dan berbahaya (B3) menjadi masalah besar bagi kita karena material limbah memberikan efek buruk terhadap lingkungan dan kesehatan. Hal ini disebabkan karena kurangnya perhatian dan pengetahuan mengenai manajemen pengolahan limbah. Pada dasarnya penanganan limbah bukanlah hal yang sulit dilakukan, namun demikian pelaksanaannya perlu kesungguhan dan niat untuk menyelamatkan kesehatan dan lingkungan kita
Logam Non-Ferro (Non-Ferrous Metal) ialah jenis logam yang secara kimiawi tidak memiliki unsur besi atau Ferro (Fe), oleh karena itu logam jenis ini disebut sebagai logam bukan Besi (non Ferro). Beberapa dari jenis logam ini telah disebutkan dimana termasuk logam yang banyak dan umum digunakan baik secara murni maupun sebagai unsur paduan. Dengan semakin berkembangnya ilmu pengetahuan dan teknologi terutama dalam pengolahan bahan logam, menjadikan semua jenis logam digunakan secara luas dengan berbagai alasan, mutu produk yang semakin ditingkatkan, kebutuhan berbagai peralatan pendukung teknologi serta keterbatasan dari ketersediaan bahan-bahan yang secara umum digunakan dan lain-lain.
Logam non Ferro ini terdapat dalam berbagai jenis dan masing-masing memiliki sifat dan karakteristik yang berbeda secara spesifik antara logam yang satu dengan logam yang lainnya. Keberagaman sifat dan karakteristik dari logam Non Ferro ini memungkinkan pemakaian secara luas baik digunakan secara murni atau pun dipadukan antara logam non ferro bahkan dengan logam Ferro untuk mendapatkan suatu sifat yang baru yang berbeda dari sifat asalnya.
Pengertian dari bahan bukan logam atau non logam adalah unsure kimia yang mempunyai sifat-sifat, yaitu :
− Elastis (karet), cair (bahan pelumas, dan tidak dapat menghantarkan arus listrik (bahan isolasi)).
− Peka terhadap api (bahan baker, tidak dapat terbakar (Asbes) dan mudah pecah (keramik)
2.2 Arduino
2.2.1. Pengertian Arduino
Mikrokontroler merupakan sebuah sistem komputer yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering disebut single chip microcomputer. Lebih lanjut, mikrokontroler merupakan sistem komputer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dangan PC (Personal Computer) yang memiliki beragam fungsi. Perbedaan lainnya adalah perbandingan RAM dan ROM yang sangat berbeda antara komputer dengan mikrokontroler.
Pengertian Arduino Menurut (Feri Djuandi, 2011) Arduino adalah merupakan sebuah board minimum system mikrokontroler yang bersifat open source. Didalam rangkaian board arduino terdapat mikrokontroler AVR seri ATMega 328 yang merupakan produk dari Atmel. Menurut Sulaiman (2012:1), arduino merupakan platform yang terdiri dari software dan hardware. Hardware Arduino sama dengan mikrokontroler pada umumnya hanya pada arduino ditambahkan penamaan pin agar mudah diingat. Software Arduino merupakan software open source sehingga dapat di download secara gratis.
Software ini digunakan untuk membuat dan memasukkan program ke dalam Arduino.
Pemrograman Arduino tidak sebanyak tahapan mikrokontroler konvensional karena Arduino sudah didesain mudah untuk dipelajari, sehingga para pemula dapat mulai belajar mikrokontroler dengan Arduino.
Menurut Santosa (2012:1), arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Berdasarkan pengertian - pengertian yang dikemukakan diatas maka dapat disimpulkan bahwa arduino merupakan kit elektronik atau papan rangkaian elektronik yang didalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dan memiliki sofware pemrograman yang berlisensi open source.
2.2.2 Hardware
Hardware dalam arduino memiliki beberapa jenis, yang memiliki kelebihan dan kekurangan di masing-masing papannya. Penggunaan jenis arduino disesuaikan dengan kebutuhan, hal inilah yang mempengaruhi dari jenis prosessor yang akan digunakan.
Apabila semakin kompleks perancanagan dan program yang akan dibuat atau dirancang, maka harus sesuai pula jenis kontroler yang digunakan. Yang membedakan antara arduino yang satu dengan arduino jenis lainnya adalah penambahan fungsi dalam setiap board-nya dan jenis mikrokontroler yang digunakan. Dalam tugas akhir ini, jenis arduino yang digunakan adalah arduino mega 2560.
2.2.2.1 Arduino Nano
Arduino nano adalah salah satu papan pengembangan mikrokontroler yang berukuran kecil, lengkap dan mendukung penggunaan breadboard. Arduino nano diciptakan dengan basis mikrokontroler ATmega328 (untuk Arduino versi 3.x) atau ATmega 168 (untuk Arduino versi 2.x). Arduino Nano kurang lebih memiliki fungsi yang sama dengan Arduino Duemilanove, tetapi dalam paket yang berbeda. Arduino uno tidak menyertakan colokan DC berjenis Barrel Jack, dan dihubungkan ke komputer menggunakan port USB Mini-B. Arduino Nano dirancang dan diproduksi oleh perusahaan Gravitech.
Gambar 2.1 Arduino Nano
2.2.2.2 Arduino Software (IDE)
2.2.2.3.Pengertian Arduino Software (IDE)
IDE itu merupakan kependekan dari Integrated Developtment Enviroenment, atau secara bahasa mudahnya merupakan lingkungan terintegrasi yang digunakan untuk melakukan pengembangan. Disebut sebagai lingkungan karena melalui software inilah Arduino dilakukan pemrograman untuk melakukan fungsi-fungsi yang dibenamkan melalui sintaks pemrograman. Arduino menggunakan bahasa pemrograman sendiri yang menyerupai bahasa C. Bahasa pemrograman Arduino
(Sketch) sudah dilakukan perubahan untuk memudahkan pemula dalam melakukan pemrograman dari bahasa aslinya. Sebelum dijual ke pasaran, IC mikrokontroler Arduino telah ditanamkan suatu program bernama Bootlader yang berfungsi sebagai penengah antara compiler Arduino dengan mikrokontroler.
Arduino IDE dibuat dari bahasa pemrograman JAVA. Arduino IDE juga dilengkapi dengan library C/C++ yang biasa disebut Wiring yang membuat operasi input dan output menjadi lebih mudah. Arduino IDE ini dikembangkan dari software Processing yang dirombak menjadi Arduino IDE khusus untuk pemrograman dengan Arduino.
2.2.2.4.Menulis Sketch
Program yang ditulis dengan menggunaan Arduino Software (IDE) disebut sebagai sketch. Sketch ditulis dalam suatu editor teks dan disimpan dalam file dengan ekstensi .ino. Teks editor pada Arduino Software memiliki fitur-fitur seperti cutting/paste dan seraching/replacing sehingga memudahkan pengguna dalam menulis kode program. Pada Software Arduino IDE, terdapat semacam message box berwarna hitam yang berfungsi menampilkan status, seperti pesan error, compile, dan upload program. Di bagian bawah paling kanan Software Arduino IDE, menunjukan board yang terkonfigurasi beserta COM Ports yang digunakan
Gambar 2.2 Tampilan dari Software Arduino IDE
Tabel 2.1 Symbol dan fungsi dari Toolbar Software Arduino IDE
Berikut merupakan bagian-bagian dari menu bar dan penjelasannya yang terdapat pada software Arduino IDE.
a. File
− New, berfungsi untuk membuat membuat sketch baru dengan bare minimum yang terdiri void setup() dan void loop().
− Open, berfungsi membuka sketch yang pernah dibuat di dalam drive.
− Open Recent, merupakan menu yang berfungsi mempersingkat waktu pembukaan file atau sketch yang baru-baru ini sudah dibuat.
− Sketchbook, berfungsi menunjukan hirarki sketch yang kamu buat termasuk struktur foldernya.
− Example, berisi contoh-contoh pemrograman yang disediakan pengembang Arduino, sehingga pengguna dapat mempelajari program-program dari contoh yang diberikan.
− Close, berfungsi menutup jendela Arduino IDE dan menghentikan aplikasi. − Save, berfungsi menyimpan sketch yang dibuat atau perubahan yang dilakukan pada sketch
− Save as…, berfungsi menyimpan sketch yang sedang dikerjakan atau sketch yang sudah disimpan dengan nama yang berbeda.
− Page Setup, berfungsi mengatur tampilan page pada proses pencetakan.
− Print, berfungsi mengirimkan file sketch ke mesin cetak untuk dicetak.
− Preferences, disini pengguna dapat merubah tampilan interface IDE Arduino.
− Quit, berfungsi menutup semua jendela Arduino IDE. Sketch yang masih terbuka pada saat tombol Quit ditekan, secara otomatis akan terbuka pada saat Arduino IDE dijalankan.
b. Edit
− Undo/Redo, berfungsi untuk mengembalikan perubahan yang sudah dilakukan pada Sketch beberapa langkah mundur dengan Undo atau maju dengan Redo.
− Cut, berfungsi untuk me-remove teks yang terpilih pada editor dan menempatkan teks tersebut pada clipboard.
− Copy, berfungsi menduplikasi teks yang terpilih kedalam editor dan menempatkan teks tersebut pada clipboard.
− Copy for Forum, berfungsi melakukan copy kode dari editor dan melakukan formating agar sesuai untuk ditampilkan dalam forum, sehingga kode tersebut bisa digunakan sebagai bahan diskusi dalam forum.
− Copy as HTML, berfungsi menduplikasi teks yang terpilih kedalam editor dan menempatkan teks tersebut pada clipboard dalam bentuk atau format HTML. Biasanya ini digunakan agar code dapat di- embededd-kan pada halaman web.
− Paste, berfungsi menyalin data yang terdapat pada clipboard, kedalam editor.
− Select All, berfungsi untk melakukan pemilihan teks atau kode dalam halaman editor.
− Comment/Uncomment, berfungsi memberikan atau menghilangkan tanda // pada kode atau teks, dimana tanda tersebut menjadikan suatu baris kode sebagai komen dan tidak disertakan pada tahap kompilasi.
− Increase/Decrease Indent, berfunsgi untuk mengurangi atau menambahkan indetntasi pada baris kode tertentu. Indentasi adalah
“tab”.
− Find, berfungsi memanggil jendela window “find and replace”, dimana pengguna dapat menggunakannya untuk menemukan variabel atau kata tertentu dalam program atau menemukan serta menggantikan kata tersebut dengan kata lain.
− Find Next, berfungsi menemukan kata setelahnya dari kata pertama yang berhasil ditemukan.
− Find Previous, berfungsi menemukan kata sebelumnya dari kata pertama yang berhasil ditemukan.
c. Sketch
− Verify/Compile, berfungsi untuk mengecek apakah sketch yang kamu buat ada kekeliruan dari segi sintaks atau tidak. Jika tidak ada kesalahan, maka sintaks yang kamu buat akan di-compile kedalam bahasa mesin.
− Upload, berfunsi mengirimkan program yang sudah dikompilasi ke Arduino Board.
− Uplad Using Programmer, menu ini berfungsi untuk menuliskan bootloader kedalam IC Mikrokontroler Arduino. Pada kasus ini kamu membutuhkan perangkat tambahan seperti USBAsp untuk menjembatani penulisan program bootloader ke IC Mikrokontroler.
− Export Compiled Binary, berfungsi untuk menyimpan file dengan ekstensi .hex, dimana file ini dapat disimpan sebagai arsip untuk di upload ke board lain menggunakan tools yang berbeda.
− Show Sketch Folder, berfungsi membuka folder sketch yang saat ini dikerjakan.
− Include Library, berfunsi menambahkan library / pustaka kedalam sketch yang dibuat dengan menyertakan sintaks #include di awal kode.
Selain itu kamu juga bisa menambahkan library eksternal dari file .zip kedalam Arduino IDE.
− Add File…, berfungsi untuk menambahkan file kedalam sketch arduino (file akan dikopikan dari drive asal). File akan muncul sebagai tab baru dalam jendela sketch.
d. Tools
− Auto Format, berfungsi melakukan pengaturan format kode pada jendela editor.
− Archive Sketch, berfungsi menyimpan sketch kedalam file zip.
− Fix Encoding & Reload, berfungsi memperbaiki kemungkinan perbedaan
− Antara pengkodean peta karakter editor dan peta karakter sistem operasi yang lain..
− Serial Monitor, berungsi membuka jendela serial monitor untuk melihat pertukaran data.
− Board, berfungsi memilih dan melakukan konfigurasi board yang digunakan.
− Port, memilih port sebagai kanal komunikasi antara software dengan hardware.
− Programmer, menu ini digunakan ketika pengguna hendak melakukan pemrograman chip mikrokontroller tanpa menggunakan koneksi Onboard USB-Serial. Biasanya digunakan pada proses burning bootloader.
− Burn Bootloader, mengizinkan kamu untuk mengkopikan program bootloader kedalam IC mikrokontroler
e. Help
Disini kamu bisa mendapatkan bantuan terhadap kegalauanmu mengenai pemrograman. Menu help berisikan file-file dokumentasi yang berkaitan dengan masalah yang sering muncul, serta penyelesaiannya. Selain itu pada menu help juga diberikan link untuk menuju Arduino Forum guna menanyakan serta mendiskusikan berbagai masalah yang ditemukan.
2.3 LCD
LCD kepanjangan dari Liquid Crystal Display merupakan jenis penampil yang mepergunakan kristal cair sebagai bahan untuk menampilkan data yang berupa tulisan maupun gambar. Pengaplikasian pada kehidupan sehari – hari yang mudah dijumpai antara lain pada kalkulator, gamebot, televisi, atau pun layar komputer. Jenis dari perangkat ini ada yang dan pada postingan ini akan dibahas tentang mengakses LCD 16×2 dengan mudah. Adapun fitur – fitur yang tersedia antara lain:
• Terdiri dari 16 kolom dan 2 baris
• Dilengkapi dengan back light
• Mempunyai 192 karakter tersimpan
• Dapat dialamati dengan mode 4-bit dan 8-bit
• Terdapat karakter generator terprogram
Gambar 2.3 LCD
2.4 Adaptor
Adaptor adalah sebuah rangkaian yang berguna untuk mengubah tegangan AC yang tinggi menjadi DC yang rendah. Adaptor merupakan sebuah alternatif pengganti dari tegangan DC (seperti; baterai, Aki) karena penggunaan tegangan AC lebih lama dan setiap orang dapat menggunakannya asalkan ada aliran listrik di tempat tersebut. ada sebuah
Gambar 2.4 Adaptor 2.1.1 Bagian-bagian Adaptor
adaptor terdapat beberapa bagian yaitu:
1. Trafo(Transformator)
Adalah sebuah komponen yang berfungsi untuk menurunkan atau menaikan tegangan AC sesuai kebutuhan. Pada sebuah adaptor, trafo yang digunakan adalah trafo jenis step down atau trafo penurun tegangan. Trafo tediri dari 2 bagian yaitu bagian primer dan bagian sekunder, pada masing-masing bagian terdapat lilitan kawat email yang jumlahnya berbeda. Untuk trafo step-down, jumlah lilitan primer akan lebih banyak dari jumlah sekunder. Lilitan Primer merupakan input dari pada Transformator sedangkan Output-nya adalah pada lilitan sekunder. Meskipun tegangan telah diturunkan, output dari Transformator masih berbentuk arus bolak-balik (arus AC) yang harus diproses selanjutnya.
2. Rectifier (Penyearah)
Dalam rankaian adaptor atau catu daya, tegangan yang sudah di turunkan oleh trafo, arusnya masih berupa arus bolak-balik atau AC.
Karena arus yang dibutuhkan oleh rangkaian elektronika adalah arus DC, sehingga harus disearahkan terlebih dahulu. Bagian yang berfungsi untuk menyearahkan arus AC menjadi DC pada adaptor disebut dengan istilah rectifier (penyearah gelombang). Rangkaian Rectifier biasanya terdiri dari komponen Dioda.
3. Filter (Penyaring)
Filter adalah bagian yang berfungsi untuk menyaring atau meratakan sinyal arus yang keluar dari bagian rectifier. Filter ini biasanya terdiri dari komponen Kapasitor (Kondensator) yang berjenis Elektrolit atau ELCO (Electrolyte Capacitor). Sebenarnya dengan adanya bagian trafo, rectifier dan filter syarat dari sebuah adaptor sudah terpenuhi, namun terkadang tegangan yang dihasilkan biasanya tidak stabil sehingga diperlukan bagian lain yaitu yang berfungsi untuk menstabilkan tegangan dan mendapatkan tegangan yang akurat.
Bagian tersebut adalah bagian regulator atau pengatur tegangan.
Adaptor adalah sebuah perangkat berupa rangkaian elektronika untuk mengubah tegangan listrik yang besar menjadi tegangan listrik lebih kecil, atau rangkaian untuk mengubah arus bolak-balik (arus AC) menjadi arus searah (arus DC). Adaptor / power supplay merupakan komponen inti dari peralatan elektronik. Adaptor digunakan untuk menurunkan tegangan AC 22 Volt menjadi kecil antara 3 volt sampai 12 volt sesuai kebutuhan alat elektronika. Terdapat 2 jenis adaptor berdasarkan sistem kerjanya, adaptor sistem trafo step down dan adaptor sistem switching.
Dalam prinsip kerjanya kedua sistem adaptor tersebut berbeda, adaptor stepdown menggunakan teknik induksi medan magnet, komponen utamanya adalah kawat email yang di lilit pada teras besi, terdapat 2 lilitan yaitu lilitan primer dan lilitan skunder, ketika listrik masuk kelilitan primer maka akan terjadi induksi pada kawat email sehingga akan teerjadi gaya medan magnet pada teras besi kemudian akan menginduksi lilitan skunder.
Sedangkan sistem switching menggunakan teknik transistor maupun IC switching, adaptor ini lebih baik dari pada adaptor teknik induksi, tegangan yang di keluarkan lebih stabil dan komponennya suhunya tidak terlalu panas sehingga mengurangi tingkat resiko
kerusakan karena suhu berlebih, biasanya regulator ini di gunkan pada peralatan elektronik digital. Adaptor dapat dibagi menjadi empat macam, diantaranya adalah sebagai berikut :
1. Adaptor DC Converter,adalah sebuah adaptor yang dapat mengubah tegangan DC yang besar menjadi tegangan DC yang kecil. Misalnya: Dari tegangan 12v menjadi tegangan 6v;
2. Adaptor Step Up dan Step Down. Adaptor Step Up adalah sebuah adaptor yang dapat mengubah tegangan AC yang kecil menjadi tegangan AC yang besar. Misalnya: Dari Tegangan 110v menjadi tegangan 220v. Sedangkan Adaptor Step Down adalah adaptor yang dapat mengubah tegangan AC yang besar menjadi tegangan AC yang kecil. Misalnya: Dari tegangan 220v menjadi tegangan 110v.
3. Adaptor Inverter, adalah adaptor yang dapat mengubah tegangan DC yang kecil menjadi tegangan AC yang besar. Misalnya: Dari tegangan 12v DC menjadi 220v AC.
4. Adaptor Power Supply, adalah adaptor yang dapat mengubah tegangan listrik AC yang besar menjadi tegangan DC yang kecil. Misalnya: Dari tegangan 220v AC menjadi tegangan 6v, 9v, atau 12v DC.
2.5 Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Penggunaan sistem kontrol loop tertutup pada motor servo berguna untuk mengontrol gerakan dan posisi akhir dari poros motor servo. Penjelasan sederhananya begini, posisi poros output akan di sensor untuk mengetahui posisi poros sudah tepat seperti yang di inginkan atau belum, dan jika belum, maka kontrol input akan mengirim
sinyal kendali untuk membuat posisi poros tersebut tepat pada posisi yang diinginkan.
Untuk lebih jelasnya mengenai sistem kontrol loop tertutup, perhatikan contoh sederhana beberapa aplikasi lain dari sistem kontrol loop tertutup, seperti penyetelan suhu pada AC, kulkas, setrika dan lain sebagainya.
Motor servo biasa digunakan dalam aplikasi-aplikasi di industri, selain itu juga digunakan dalam berbagai aplikasi lain seperti pada mobil mainan radio kontrol, robot, pesawat, dan lain sebagainya.
Gambar 2.5 Motor servo
Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin- mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180⁰ dan servo rotation continuous.
• Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰.
• Motor servo rotation continuous merupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
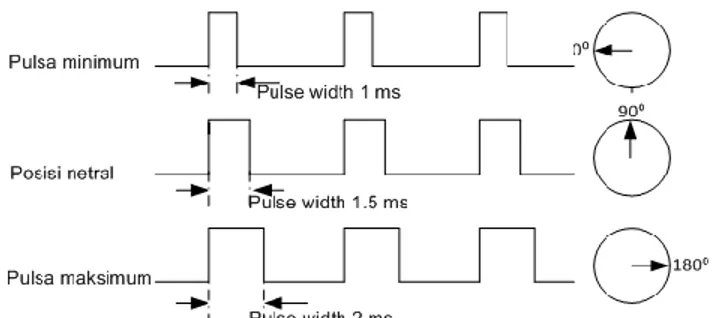
Prinsip kerja motor servo yaitu; Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.
Gambar 2.6 Pulsa
Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa
kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
2.6 HC-SR04
HC-SR04 adalah sebuah modul sensor ultrasonik yang biasanya digunakan untuk alat pengukur jarak. Pada artikel ini kita akan mempelajari bagaimana cara kerja dari sensor HC-SR04 dan berikut contoh programnya dengan menggunakan Arduino. Pada HC-SR04 terdapat sepasang transducer ultrasonik yang satu berfungsi sebagai transmitter yang bertugas untuk mengubah sinyal elektrik menjadi sinyal pulsa gelombang suara ultrasonik dengan frekuensi 40KHz, dan satunya berfungsi sebagai receiver yang bertugas untuk menerima sinyal gelombang suara ultrasonik. Gelombang suara ultrasonik adalah sebuah gelombang suara dengan frekuensi yang berada diatas batas pendengaran manusia.
Seperti yang kita ketahui bahwasannya batas pendengaran manusia berada pada rentang frekuensi 20Hz – 20KHz. Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar.
Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz hingga 400 KHz diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara dan pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang ultrasonik akan diterima kembali oleh oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama.
Besar amplitudo sinyal elekrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensing yang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut
dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx,dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya.
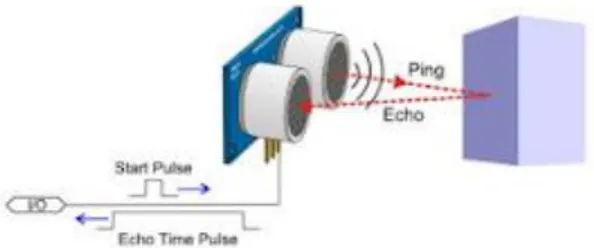
Prinsip Kerja Sensor Ultrasonik pada awalnya sebuah sinyal akan dipancarkan oleh pemancar sensor ultrasonic. Sinyal yang telah dipancarkan berfrekuensi lebih dari 20kHz, sedangkan sinyal yang biasa digunakan untuk mengukur jarak suatu benda adalah 40kHz. Sinyal tersebut akan dibangkitkan oleh rangkaian pemancar ultrasonic. Kemudian sinyal yang telah dipancarkan tersebut akan merambat sebgai sinyal atau gelombang bunyi dengan kecepatan bunyi berkisar 340 m/s.
Sinyal yang merambat akan dipantulkan dengan objek didepannya dan akan diterima oleh receiver atau bagian penerima ultrasonic. Setelah sinyal tersebut sampai di receiver ultrasonic, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya.
Jarak dihitung berdasarkan rumus S =340 x t/2, dimana S adalah jarak antara sensor ultrasonic dengan bidang pantul, dan t adalah selisih waktu antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonic.
Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba. Bunyi ultrasonik nisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
Gambar 2.7 Prinsip Kerja Sensor Ultrasonik
Besar amplitudo sinyal elekrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensing yang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara.
Cara kerja HC-SR04 yaitu; Sebuah sinyal pulsa dengan durasi setidaknya 10 μS (10 mikrodetik) diterapkan ke pin Trigger. Setelah itu, sensor mentransmisikan gelombang ultrasonik delapan pulsa pada frekuensi 40 KHz. Pola 8-pulsa ini digunakan untuk sebuah penanda sinyal ultrasonik dari modul ini, yang memungkinkan receiver / penerima untuk membedakan pola yang ditransmisikan dari kebisingan ultrasonik sekitar.
Delapan pulsa ultrasonik bergerak melalui udara menjauh dari transmitter / pemancar mengarah ke benda atau obyek yang ada di depannya.
Sementara itu pin Echo menjadi HIGH / TINGGI untuk mulai membentuk awal sinyal gema. Jika tidak ada sinyal ultrasonik yang dipantulkan atau diterima oleh receiver selama rentang 38 mS (mili detik), yang artinya tidak ada obyek atau benda maka sinyal Echo akan Timeout dan kembali menjadi LOW / RENDAH.
Sedangkan jika ada sinyal ultrasonik yang dipantulkan atau diterima oleh receiver, maka saat itu juga sinyal Echo langsung berubah menjadi LOW / RENDAH. Nah, lebar rentang waktu dari sinyal ECHO inilah yang digunakan untuk mengukur jarak antara sensor dengan obyek atau benda.
Gambar 2.8 Sensor HC-SR04
2.7 Sensor Kapasitive Proximity
Sensor proximity kapasitif bekerja untuk mendeteksi ada atau tidaknya objek dengan melihat perubahan nilai kapasitansi ketika didekatkan dengan benda tertentu. Sensor ini akan membangkitkan medan elektrik dan nantinya akan mendeteksi nilai kapasitansi ketika medan elektrik ini memotong suatu objek. Dalam fisika kita punya persamaan untuk besarnya nilai kapasitansi suatu benda. Dari sini kita lihat bahwa perubahan nilai kapasitansi tergantung beberapa faktor yaitu:
• Jarak dan posisi benda di depan sensor proximity
• Ukuran dan bentuk objek
• Konstanta dielektrik benda tersebut
Karena hubungan perubahan jarak dengan benda dan nilai kapasitansi tidak linier, maka sensor ini sulit dipakai sebagai pendeteksi jarak. Aplikasinya hanya sebagai pendeteksi ada atau tidaknya benda (baik logam maupun nonlogam) dengan mengatur nilai set point kapasitansinya terhadap benda yang akan kita deteksi.
Sifat Sensor Capasitive yang Dimanfaatkan Dalam Pengukuran
• Jika luas permukaan dan dielektrika (udara) dalam dijaga konstan, maka perubahan nilai kapasitansi ditentukan oleh jarak antara kedua lempeng logam.
• Jika luas permukaan dan jarak kedua lempeng logam dijaga konstan dan volume dilektrikum dapat dipengaruhi makan perubahan kapasitansi ditentukan oleh volume atau ketinggian cairan elektrolit yang diberikan.
• Jika jarak dan dielektrikum (udara) dijaga konstan, maka perubahan kapasitansi ditentukan oleh luas permukaan kedua lempeng logam yang saling berdekatan.
Kelebihan-kelebihan sensor proximity capasitive yaitu:
1. Dapat mendeteksi benda seperti besi, plastic, air, batu, dll 2. Tahan lama dan dapat melindungi arus.
3. Dapat menyesuaikan jarak benda.
4. Terdapat indicator dengan led merah.
5. Mudah untuk mengontrol posisi.
Gambar 2.9 sensor proximity capasitive
BAB 3
METODOLOGI PENELITIAN 3.1 Metode Penelitian
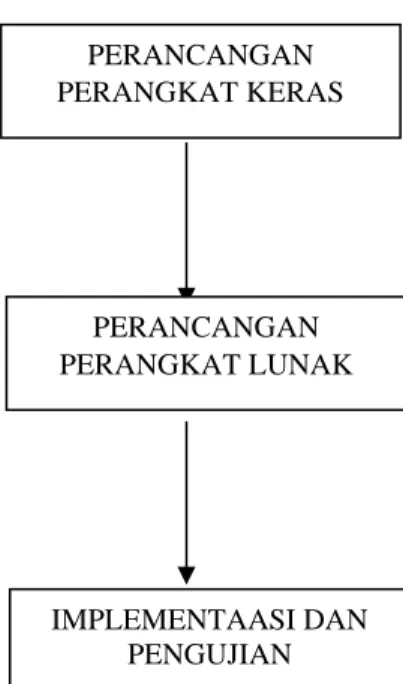
Dalam penelitian peningkatan kapasitas ini dilakukan dalam beberapa tahapan seperti yang ditunjukkan dalam gambar 3.1 dibawah ini
Gambar 3.1 Tahapan Tahapan Penelitian
1. Tahap Perancangan perangkat keras. Perancangan perangkat keras dilakukan dengan membuat sebuah alat pemisah sampah logam dan nonlogam dengan memilih modul sensor HCSR-04, kapasitif proximity, sebagai alat merangkai dan Arduino Nano sesuai dengan rancangan perangkat keras yang telah dibuat.
2. Tahap perancangan perangkat lunak. Perancangan perangkat lunak dilakukan dengan terlebih dahulu membuat Diagram alir selanjutnya menulis program dalam Bahasa C Arduino.
3. Tahap implementasi dan pengujian, pada tahap implementasi ini dilakukan penggabungan antara PSA yang telah dibuat dengan rangkaian perangkat keras elektronik sesuai dengan rancangan sistem yang telah dibuat, dan selanjutnya dilakukan pengujian setiap komponen elektronik penyusun perangkat keras elektronik apakah kinerja setiap komponen elektronik sudah sesuai dengan yang
PERANCANGAN PERANGKAT KERAS
PERANCANGAN
PERANGKAT LUNAK
IMPLEMENTAASI DAN PENGUJIAN
diinginkan berdasarkan rancangan sistem, dan pada tahap akhir yaitu pengujian sistem secara keseluruhan.
3.2 Perancangan Sistem
Hasil rancangan sistem secara kesealuruhan dibagi menjadi tiga bagian, yaitu board arduino sebagai kontroler, modul load cell, power supply, sensor proximity dan hcsr-04 sebagai inputan untuk board arduino nano dan motor servo dan display lcd sebagai output dari board arduino seperti yang ditunjukkan dalam Gambar 3.2.
Gambar 3.2 Diagram Blok Rangkaian
3.2.1 Fungsi Tiap Blok
1. Blok Arduino Nano : Sebagai otak dan pengontrol pada system elektronika alat.
2. Blok Proximity Capasitif : Sebagai input sensor untuk mendeteksi sampah Mikrokontroler
Arduino Nano Sensor Proximity
Capasitif Display LCD
Motor Servo Sensor HC-SR 04
Supply
logam dan non logam.
3. Blok HC-SR 04 : Sebagai input sensor untuk mendeteksi jarak objek.
4. Blok LCD : Sebagai Output tampilan nilai pembacaan sensor.
5. Blok Motor Servo : Sebagai Output Pemisah sampah logam dan nonlogam.
6. Blok Supply : Sebagai penyedia sumber arus listrik ke sistem alat.
3.3 Rangkaian Catu Daya
Rangkaian catu daya berfungsi untuk memberikan supply tegangan listrik pada alat yang dimana rangkaian ini merubah tegangan listrik AC 220 volt menjadi tegangan listrik DC 12 volt.
Gambar 3.3 Rangkaian Catu Daya
3.4 Rangkaian Penstabil Tegangan (Regulator)
Rangkaian ini berfungsi untuk memberikan supply tegangan keseluruh rangkaian yang ada. Keluaran rangkaian regulator ini yaitu 5 volt, keluaran 5 volt.
Gambar 3.4 Rangkaian Regulator
Adaptor yang digunakan yaitu adaptor 12 volt, adaptor berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt DC. Regulator tegangan 5volt (LM7805) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masuknya. LED hanya sebagai indikator apabila apabila PSA dinyalakan.
3.5 Rangkaian LCD (Liquid Crystal Display)
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16 x 2. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi – M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler rmenjadi tampilan karakter. Pemasangan potensio sebesar 5 KΩ untuk mengatur kontras karakter yang tampil. Gambar 3.4 berikut merupakan gambar rangkaian LCD yang dihubungkan ke mikrokontroler.
Gambar 3.5 Rangkaian LCD
Dari gambar 3.4, rangkaian ini terhubungke PD.0... PD7, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Analog and Digital Converter. Nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroller Arduino nan
3.6 Rangkaian Sensor Capasitive Proximity.
Gambar 3.6 Rangkaian Sensor MQ 6
Vccpada sensor proximity dihubungkankeArduino.
Gndpada sensor proximity dihubungkanke Gnd.
Pin signal sensor proximity dihubungkanke pin A2 Arduino.
3.7 Rangkaian Sensor HC-SR 04.
Gambar 3.7 Rangkaian Sensor HC-SR 04
Vcc pada module sensor HC-SR 04 dihubungkan ke Arduino.
Gnd pada module sensor HC-SR 04 dihubungkan ke Gnd.
Pin trig sensor HC-SR 04dihubungkan ke pin a1 Arduino.
Pin echo sensor HC-SR 04dihubungkanke pin A0 Arduio.
3.8 Rangkaian Sensor Motor Servo.
Rangkaian output pada alat yang digunakan adalah rangkaian motor servo yang dimana prinsip kerja dari motor servo iyalah bergerak dari 0 derajat menjadi 180 derajat.
Gambar 3.8 Rangkaian Motor Servo
Vcc pada motor servo dihubungkan ke Arduino.
Gnd pada motor servo dihubungkanke Gnd.
Pin signal motor servo dihubungkan ke pin D10 Arduino.
3.9 Rangkaian keseluruhan Sistem.
Pada rangkaian ini sensor HC-SR04 dan sensor cavasitive proximity berfungsi sebagai input pengukuran pada objek yang akan diukur, motor servo sebagai output dari alat yang akan bergerak dari 0 derajat, 90 derajat, dan 180 derajat untuk memisahkan objek yang dibaca oleh sensor, rangkaian regulator berfungsi untuk mensupply daya listrik pada alat.
Gambar 3.9 Rangkaian keseluruhan Sistem
3.10 Flowchart System
Gambar 3.10 Flowcahrt System
3.10.1 Algoritma Flowchar 1. Start.
2. Inisialisasi Perangkat, ini dimaksudkan apakah perangkat sudah terpasang dengan benar sesuai dengan skematik rangkaian.
3. Sensor membaca objek.
4. Jika nilai sensor proximity= 0 maka objek adalah sampah logam dan motor servo 00 (objek masuk ke tempah sampah kanan).
5. Jika nilai sensor jarak <= 6 cm maka objek adalah sampah non logam dan motor servo 1800 (objek masuk ke tempah sampah kiri).
6. Jika nilai sensor proximity= 1 maka tidak ada objek dan motor servo 900 (penampungan sampah ready).
7. LCD 16x2 akan menampilkan status objek.
8. Selesai
BAB 4
HASIL DAN PEMBAHASAN
4.1 Pengujian Rangkaian Regulator
Pengujian rangkaian regulator ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari output regulator 7805 menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak.
Gambar 4.1 Tegangan Output Ic Regulator 7805
Pada pump menggunakan 12 volt, jadi pada pump air ini tidak perlu menggunakan ic regulator karena output dari adaptor sudah 12 volt DC.
4.2 Pengujian Rangkaian Mikrokontroler Arduino nano
Pemrograman menggunakan mode ISP (In System Programming) mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu Arduino nano.
Gambar 4.2. Informasi Signature Mikrokontroler Arduino nano
Arduino nano menggunakan kristal dengan frekuensi 8 MHz, apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat, bisa dikatakan rangkaian mikrokontroler bekerja dengan baik dengan mode ISP-nya.
4.3 Pengujian Display LCD
Rangkaian LCD dihubungkan ke PD.0, PD6, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer, yaitu sebagai timer/counter, komperator analog dan spimempunyai fungsi khusus sebagai pengerimana data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat di kendalikan oleh Mikrokontroller ATMega8535.
Pada bagian ini, mikrokontroller dapat member data langsung ke LCD. Pada LCD Hitachi- M11632 sudah terdapat driver untk mengubah ASCII output mikrokontroller menjadi tampilan karakter.
Tabel 4.2. Pengukuran pin IC LCD
No Pin Tegangan keluaran
(Volt)
1 0,0
2 4,95
3 1,39
4 3,96
5 3,96
6 0,0
7 4,93
8 4,93
9 4,93
10 4,93
11 0,0
12 3,96
13 3,96
14 0,0
15 4,95
16 0,0
Tabel diatas merupakan hasil pengukuran pada Display LCD, pengukurann dilakukan dengan tujuan untuk mengetahui apakah LCD bekerja dengan baik atau tidak yaitu dengan membandingkan tegangan terukur dengan program maupun data sheet.
4.4 Hasil Pengujian Sensor Kapasitif Proximity dan Sensor HC-SR04
Adapun hasil pengujian pemilah sampah organik dan anorganik dapat dilihat pada tabel tabel dibawah ini:
Table 4.3 Hasil Pengujian Sensor Kapasitif Proximity dan Sensor HC-SR04 Objek Sensor Proximity Sensor HC-SR04 Motor Servo
Potongan Seng 1 Tidak Terhalang 00
Botol Kaleng 1 Terhalang 00
Gunting 1 Tidak Terhalang 00
Daun 0 Terhalang 900
Potongan Kayu 0 Terhalang 900
Kulit Buah 0 Terhalang 900
4.5 Pengujian Hardware
Setelah semua rangkaian yang telah selesai dirancang pada “Implementasi Mikrokontroller Pemilah Sampah Logam Dan Nonlogam Pada Tempat Sampah”, kemudian dilakukan penyatuan semua rangkaian yang telah selesai. Berikut adalah gambar hasil dari perancangan sistem ditunjukan oleh gambar:
Gambar 4.3 Keseluruhan dari Hardware 4.6 Uji Coba Perangkat
Setelah semua komponen terpasang dan program selesai disusun, maka langkah berikutnya adalah melakukan pengujian alat. Pengujian ini dilakukan secara bertahap dari rangkaian ke rangkaian berikutnya.
4.6.1 Pengujian Downloader Programmer
Pengujian rangkaian downloader ini dapat dilakukan dengan memindahkan data program dari komputer ke mikrokontroler Arduino. downloader terlebih dahulu disambungkan ke PC, melalui port USB. Data program diketik pada software Arduino menggunakan bahasa C kemudian dikompilasi dan di-download ke mikrokontroler. Jika proses men-download tidak terdapat error, maka downloader dan mikrokontroler yang digunakan dalam kondisi baik.
4.7 Hasil Pengujian Perangkat Hardware
Setelah perangkat hardware di program ke mikrokontroler dan sudah di execute menggunakan downloader maka secara otomatis program sudah masuk ke mikrokontroler..
Gambar 4.4 Sistem Rangkaian Alat
4.8 Hasil Pengujian
Pada hasil pengujian ini dilakukan penguujian dengan memasukan sampah logam dan sampah non logam pada tempat sampah otomatis pemilah sampah logam dan sampah non logam sebagai berikut:
1. Hasil pengujian dengan memasukan sampah logam. seperti gambar dibawah ini.
Gambar 4.5 Hasil Pengujian Alat dengan sampah logam
Maka sistem alat akan menampilkan jenis sampah pada lcd 16x2 dan sampah akan masuk pada tempat sampah sebelah kanan. Seperti gambar dibawah ini.
Gambar 4.6 Hasil Pengujian Tampilan Status Sampah
2. Hasil pengujian dengan memasukan sampah non logam. seperti gambar dibawah ini.
Gambar 4.7 Hasil Pengujian Alat dengan sampah logam
Maka sistem alat akan menampilkan jenis sampah pada lcd 16x2 dan sampah akan masuk pada tempat sampah sebelah kiri. Seperti gambar dibawah ini.
Gambar 4.8 Hasil Pengujian Tampilan Status Sampah
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Setelah melakukan tahap perancangan dan pembuatan sistem yang kemudian dilanjutkan dengan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut:
1. Prinsip kerja sensor kapasitif proximity pada sistem alat adalah sebagai pemberi sinyal masukan yang merasakan sampah logam dan sampah non logam, Alat pemilah sampah logam dan non logam ini tidak dapat memisahkan sampah secara bersamaan, dilakukan dengan satu per satu.
2. Arduino sebagai sistem control dari alat ini dan LCD 16x2 pada alat berfungsi untuk menampilkan status sampah yang dideteksi oleh alat.
3. Motor servo menjadi output dari sistem alat yang berfungsi untuk meletakan sampah pada tempat sampah sebelah kiri atau tempat sampah sebelah kanan dengan dikendalikan oleh sensor kapasitif proximity.
5.2 Saran
Beberapa saran untuk pengembangan program dan penelitian lebih lanjut adalah sebagai berikut:
1. Dengan beberapa pengembangan dan penyempurnaan si stem dari alat ini akan dapat lebih sempurna lagi hasilnya.
2. Pemograman yang telah ada lebih disederhanakan lagi, dan dijelaskan lebih detail agar lebih mudah dipahami.
DAFTAR PUSTAKA
Firman Alfin.2016. Sensor aualtrasonik. [serial online]
Jayakrista Suriandi. 2013. Perancangan dan realisasi pemilah sampah anorganik perkantoran otomatis berbasis mikrokontroler.[serial online]
Mulyadi shaleh,Irfan, Amd. 2008. Pengetahuan Dasar Teknik Mesin, Jakarta: Martapura.
Prawitasari Nila.2013.Penggunaan Motor Servo Pada Robot. [serial online]
Sulaiman.2014.Otomatis Berbasis Arduino Nano. [serial online]
Syahwil M. 2013. Panduan Mudah Simulasi dan Praktik MikrokontrolerArduino, Jogja: Andi
Lampiran
!
D1/TX (1) (30) VIN D0/RX (2) (29) GND RESET (3) (28) RESET GND (4) (27) +5V D2 (5) (26) A0 D3 (6) (25) A1 D4 (7) (24) A2 D5 (8) (23) A3 D6 (9) (22) A4 D7 (10) (21) A5 D8 (11) (20) A6 D9 (12) (19) A7 D10 (13) (18) AREF D11 (14) (17) 3V3 D12 (15) (16) D13
Pin No. Name Type Description
1-2, 5-16 D0-D13 I/O Digital input/output port 0 to 13
3, 28 RESET Input Reset (active low)
4, 29 GND PWR Supply ground
17 3V3 Output +3.3V output (from FTDI)
18 AREF Input ADC reference
19-26 A7-A0 Input Analog input channel 0 to 7
27 +5V Output or
Input
+5V output (from on-board regulator) or +5V (input from external power supply)
30 VIN PWR Supply voltage
!
!
!
!
!
!
!
1! 5! C1,C3,C4,C7,C9! Ceramic!X7R!0805! C0805C104K5RACTU! Kemet! 80"C0805C104K5R! Mouser!
2! 3! C2,C8,C10!
Capacitor,!4.7uF!10V!10%!
Tantalum!Case!A! T491A475K010AT! Kemet! 80"T491A475K010! Mouser!
3! 2! C5,C6!
Capacitor,!18pF!50V!5%!
Ceramic!NOP/COG!0805! C0805C180J5GACTU! Kemet! 80"C0805C180J5G! Mouser!
4! 1! D1! Diode,!Schottky!0.5A!20V! MBR0520LT1G! ONSemi! 863"MBR0520LT1G! Mouser!
5! 1! J1,J2! Headers,!36PS!1!Row! 68000"136HLF! FCI! 649"68000"136HLF! Mouser!
6! 1! J4!
Connector,!Mini"B!Recept!
Rt.!Angle! 67503"1020! Molex! 538"67503"1020! Mouser!
7! 1! J5! Headers,!72PS!2!Rows! 67996"272HLF! FCI! 649"67996"272HLF! Mouser!
8! 1! LD1!
LED,!Super!Bright!RED!
100mcd!640nm!120degree!
0805! APT2012SRCPRV! Kingbright! 604"APT2012SRCPRV! Mouser!
9! 1! LD2!
LED,!Super!Bright!GREEN!
50mcd!570nm!110degree!
0805! APHCM2012CGCK"F01! Kingbright! 604"APHCM2012CGCK! Mouser!
10! 1! LD3!
LED,!Super!Bright!ORANGE!
160mcd!601nm!110degree!
0805! APHCM2012SECK"F01! Kingbright! 04"APHCM2012SECK! Mouser!
11! 1! LD4!
LED,!Super!Bright!BLUE!
80mcd!470nm!110degree!
0805! LTST"C170TBKT! Lite"On!Inc! 160"1579"1"ND! Digikey!
12! 1! R1!
Resistor!Pack,!1K!+/"5%!
62.5mW!4RES!SMD! YC164"JR"071KL! Yageo! YC164J"1.0KCT"ND! Digikey!
13! 1! R2!
Resistor!Pack,!680!+/"5%!
62.5mW!4RES!SMD! YC164"JR"07680RL! Yageo! YC164J"680CT"ND! Digikey!
14! 1! SW1!
Switch,!Momentary!Tact!
SPST!150gf!3.0x2.5mm! B3U"1000P! Omron! SW1020CT"ND! Digikey!
15! 1! U1!
IC,!Microcontroller!RISC!
16kB!Flash,!0.5kB!EEPROM,!
23!I/O!Pins! ATmega168"20AU! Atmel! 556"ATMEGA168"20AU! Mouser!
16! 1! U2!
IC,!USB!to!SERIAL!UART!28!
Pins!SSOP! FT232RL! FTDI! 895"FT232RL! Mouser!
17! 1! U3!
IC,!Voltage!regulator!5V,!
500mA!SOT"223! UA78M05CDCYRG3! TI! 595"UA78M05CDCYRG3! Mouser!