29
FUZZY PADA HEAT EXCHANGER TIPE SHELL AND TUBE
Irdra Bayunanda Yanottama
S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : [email protected]
M. Syariffuddien Zuhri
S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : [email protected]
Abstrak
Heat Exchanger adalah suatu alat perpindahan panas yang mempunyai peranan yang sangat penting di berbagai bidang terutama di bidang industri dan teknologi. Pada proses perpindahan panas tersebut memerlukan beberapa persyaratan kebutuhan temperatur tertentu untuk sistemnya, sehingga sistem yang terdapat pada proses tersebut dapat berjalan dengan baik sesuai dengan yang direncanakan.
Kontroler yang digunakan dalam penelitian ini adalah Kontroler PI-Fuzzy merupakan metode pengendali yang tersusun dari pengendali konvensional dan kecerdasan buatan. Pada pengendali konvensional terdapat kontroler PI yang terdiri dari Kontrol Proporsional (𝐾𝑝)bahwa salah satu memiliki error dan juga perubahan error input, dan Kontrol Integral (𝐾𝑖) kebutuhan hanya untuk mengintegrasikan output dari kontroler. Sedangkan, pada kecerdasan buatan terdapat kontroler Fuzzy yang memiliki sifat mampu bekerja menirukan logika manusia.
Pada jurnal ini dilakukan penelitian tentang perancangan sistem pengaturan temperature fluida menggunakan PI-Fuzzy pada Heat Exchanger. Simulasi dilakukan menggunakan simulink pada software Matlab .Hasil dari pengujian bahwa penerapan kontroler yang disimulasikan pada penelitian ini berhasil, karena output respon sesuai set point sebesar 850C dengan settling time ts (± 2%) sebesar 212s, delay time (td) sebesar 21s, rise time tr (5%-95%) sebesar 21s dan terdapat overshoot mencapai 133.650C.
Kata Kunci: Pengaturan Temperatur, Heat Exchanger, Kontroler PI-Fuzzy.
Abstract
Heat Exchanger is a heat transfer tool that has a very important role in various fields especially in the fields of industry and technology . In the heat transfer process requires several requirements specific temperature for the system , so the system is contained in the process can run well as planned .
Controller used in this experiment is PI-Fuzzy controller. PI-Fuzzy controller is a controller method that composed of conventional controller and artificial intelligence. In conventional controller, PI controller consist of proportional control (Kp) that one has error ang also change of the input error, and integral control (Ki) used to integrate the output of controller. Meanwhile in artificial intelligence, Fuzzy Controller is capable to imitate human logic.
In this journals research on the fluid temperature control system design using PI - Fuzzy on the Heat Exchanger. The simulation was performed using the software Matlab Simulink The results of the testing that the application of the controller simulated in this study is successful, because the output response of the appropriate set point by 850C with a settling time ts ( ± 2 % ) of 212s , delay time ( td ) 21s, rise time tr ( 5 % -95 % ) of 21s and there is overshoot reached 133.650C.
Keywords: Temperature Control , Heat Exchanger, PI-Fuzzy Controller.
PENDAHULUAN
Proses perpindahan panas adalah salah satu bentuk dari transformasi energi dan mempunyai peranan yang sangat penting di berbagai bidang terutama di bidang industri dan teknologi. Pada proses perpindahan panas tersebut memerlukan beberapa persyaratan kebutuhan temperatur
tertentu untuk sistemnya, sehingga sistem yang terdapat pada proses tersebut dapat berjalan dengan baik sesuai dengan yang direncanakan. Pada proses industri di dalamnya terdapat proses yang berlangsung secara dinamik, yaitu variabel-variabel yang menentukan terjadinya proses itu berubah-ubah terhadap waktu. Sistem
dinamik salah satunya yaitu sistem termal. Sistem termal adalah sistem yang melibatkan perpindahan kalor dari satu zat ke zat yang lain (Katsuhiko Ogata, 1985). Dengan adanya hal tersebut, untuk mengatur perpindahan panas yang terjadi diperlukan suatu alat yaitu alat penukar kalor atau disebut juga heat exchanger, heat Exchanger bekerja dalam prinsip tiga metode konduksi , konveksi , dan radiasi (Manikandan R. dan Vinodha R., 2016).
Prinsip kerja heat exchanger adalah Dalam suatu shell and tube heat exchanger, fluida yang satu mengalir dalam pipa-pipa kecil (tube) dan fluida yang lain mengalir melalui selongsong (shell). Perpindahan panas dapat terjadi di antara kedua fluida, dimana panas akan mengalir dari fluida bersuhu lebih tinggi ke fluida bersuhu lebih rendah. Umumnya, aliran fluida dalam shell and tube heat exchanger adalah paralel atau berlawanan. Untuk membuat aliran fluida dalam shell-and-tube heat exchanger menjadi cross flow biasanya ditambahkan penyekat atau baffle. Dari proses perpindahan panas tersebut terjadi keterlambatan terhadap respon plant, sehingga error yang cukup besar terjadi pada saat awal sistem dijalankan (Rr. Rahmawati Putri Ekasari, 2014).
Proses transfer panas pada heat exchanger perlu untuk dikendalikan agar diperoleh temperatur fluida sesuai dengan kriteria yang diinginkan, sehingga pemanfaatan sumber energi yang tersedia akan lebih optimal. Pengendali PI-fuzzy memberikan pengendalian yang sangat baik dibandingkan metode lainnya. Pada proses heat exchanger adanya masalah time delay dalam proses pengukuran sinyal respon dari heat exchanger membuat model dengan system control yang biasa tidak lagi dapat bekerja dengan hasil maksimal pada plant tersebut (Rr. Rahmawati Putri Ekasari, 2014), karenanya perlu digunakan kontroler yang berbasis pada logika fuzzy. Didalam dunia industri heat exchanger terkadang harus bekerja pada beban bervariasi yang akan menyebabkan terjadinya perubahan parameter-parameter dari plant tersebut, oleh karena itu diperlukan suatu sistem kontrol yang dapat beradaptasi jika model pada plant berubah-ubah.
Kontroler PI-Fuzzy merupakan metode pengendali yang tersusun dari pengendali konvensional dan kecerdasan buatan. Pada pengendali konvensional terdapat kontroler PI yang terdiri dari kontrol proporsional (𝐾𝑝) dan kontrol integral (𝐾𝑖) yang berfungsi menghasilkan respon sistem yang memiliki kesalahan keadaan stabil nol. Sedangkan, pada kecerdasan buatan terdapat kontroler Fuzzy yang memiliki sifat mampu bekerja menirukan logika manusia.
Dengan latar belakang permasalahan tersebut diambil penelitian dengan judul Perancangan Sistem Pengaturan Temperatur Fluida Menggunakan PI-Fuzzy Pada Heat Exchanger Tipe Shell And Tube.
KAJIAN PUSTAKA
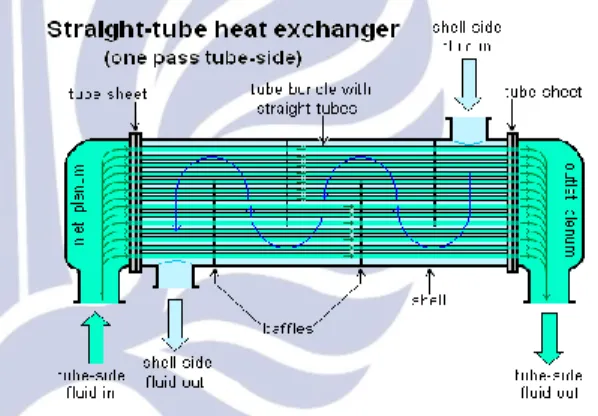
Heat Exchanger (HE)
Heat Exchanger (HE) adalah suatu alat yang memungkinkan perpindahan panas dan bisa berfungsi sebagai pemanas maupun sebagai pendingin. Biasanya, medium pemanas dipakai uap lewat panas (super heated steam) dan air biasa sebagai air pendingin (cooling water). Penukar panas dirancang sebisa mungkin agar perpindahan panas antar fluida dapat berlangsung secara efisien seperti terlihat pada Gambar 1. Berdasarkan prinsip kerja Heat Exchanger yang paling efektif adalah mengambil fluksi panas (jumlah panas yang berpindah antara dua fluida) sebagai variabel yang dikontrol, akan tetapi ini tidak mungkin dilakukan mengingat dalam praktiknya fluksi panas tersebut sulit diukur (Fathimah Ekasari M, 2014). Pertukaran panas terjadi karena adanya kontak, baik antara fluida terdapat dinding yang memisahkannya maupun keduanya bercampur langsung begitu saja. Penukar panas sangat luas dipakai dalam industri seperti kilang minyak, pabrik kimia maupun petrokimia, industri gas alam, refrigerasi, pembangkit listrik.
Gambar 1. Proses Pada Heat Exchanger
Model Matematika Heat Exchanger
Model matematika sangat penting karena memberikan informasi untuk memprediksi sifat dan karakteristik suatu sistem (Gayatri Kuchi, Valery Ponyavin, Yitung Chen, Steven Sherman, Anthony Hechanova, 2008), untuk energy balance (Carlos A. Smith, 2002) (Fazlur Rahman, M.H.R. and Devanathan, R, 1994) pada heat exchanger dapat dilihat pada persamaan dibawah , tingkat akumalasi energi = energi flow yang masuk – energi flow yang keluar + heat transfer (Belinda Chong dan Mohd Nor B, 2010).
𝑑𝐸
𝑑𝑡 = 𝐻𝑖𝑛 - 𝐻𝑜𝑢𝑡 + Q(t)……..………...(1) Di mana 𝑑𝐸
𝑑𝑡 adalah laju perubahan terhadap waktu dari energi didalam sistem, 𝐻𝑖𝑛 adalah energi flow yang masuk, 𝐻𝑜𝑢𝑡 adalah energi flow yang keluar pada sistem dan Q(t) adalah heat transfer dari sistem.
Dengan asumsi bahwa heat exchanger terisolasi dengan baik plant, panas yang tidak penting hilang di
31 sekitarnya. Dengan menggunakan hubungan termodinamika :
𝑑𝐸
𝑑𝑡 = ρ V 𝐶𝑝 𝑑𝑇𝑝𝑜𝑢𝑡
𝑑𝑡 ………...(2)
Di mana ρ adalah kepadatan cairan produk, dalam kg/lt, V adalah volume dari penukar panas, 𝐶𝑝 adalah kapasitas panas dari cairan produk, dalam kcal/kg dan 𝑑𝑇𝑝𝑜𝑢𝑡
𝑑𝑡 adalah laju perubahan temperatur pada fluida. Dimana :
𝐻𝑖𝑛 = ρ 𝐶𝑝 𝐹𝑖 (𝑇𝑝𝑖𝑛 - 𝑇𝑟𝑒𝑓)………..(3) 𝐻𝑜𝑢𝑡 = ρ 𝐶𝑝 𝐹𝑖 (𝑇𝑝𝑜𝑢𝑡(t) - 𝑇𝑟𝑒𝑓)………...(4) Di mana 𝐻𝑖𝑛 adalah energi flow yang masuk dalam sistem, 𝐻𝑜𝑢𝑡 adalah energi flow, 𝐹𝑖 adalah flow yang masuk ke dalam heat exchanger, 𝑇𝑝𝑖𝑛 adalah temperatur input fluida, 𝑇𝑝𝑜𝑢𝑡 (t) adalah temperature fluida output, dan 𝑇𝑟𝑒𝑓 adalah temperatur referensi. Dari penurunan rumus diatas, didapatkan rumus perpindahan panas pada tube and shell sebagai berikut:
Shell ρ𝑠𝑉𝑠𝐶𝑝𝑠 𝑑𝑇𝑠,𝑛 𝑑𝑡 = 𝐶𝑝𝑠 𝐹𝑠𝑇𝑠,𝑛 𝑖 - 𝐶 𝑝𝑠 𝐹𝑠𝑇𝑠,𝑛0 + 𝑄𝑛…………....(5) Tube ρ𝑡𝑉𝑡𝐶𝑝𝑡𝑑𝑇𝑡,𝑛 𝑑𝑡 = 𝐶𝑝𝑡 𝐹𝑡𝑇𝑡,𝑛 𝑖 - 𝐶𝑝𝑡 𝐹𝑠𝑇 𝑡,𝑛0 - 𝑄𝑛……….(6) Sehingga diperoleh persamaan tiap-tiap bagian zona shell and tube sebagai berikut :
Zona 1 𝑑𝑇𝑠1 𝑑𝑡 = 𝛼1(𝑇𝑠1+ 𝑇𝑠2) − 𝛼1(𝑇𝑠1+ 𝑇𝑠0) + 𝑄1 𝛼2………(7) 𝑑𝑇𝑡1 𝑑𝑡 = 𝛽1(𝑇𝑡1+ 𝑇𝑡0) − 𝛽1(𝑇𝑡1+ 𝑇𝑡2) − 𝑄1 𝛽2……….(8) 𝑄1= 𝑈 𝐴1 (𝑇𝑡1− 𝑇𝑠1)……….(9) Zona 2 𝑑𝑇𝑠2 𝑑𝑡 = 𝛼1(𝑇𝑠2+ 𝑇𝑠3) − 𝛼1(𝑇𝑠2+ 𝑇𝑠1) + 𝑄2 𝛼2…….(10) 𝑑𝑇𝑡2 𝑑𝑡 = 𝛽1(𝑇𝑡2+ 𝑇𝑡1) − 𝛽1(𝑇𝑡2+ 𝑇𝑡3) − 𝑄2 𝛽2……..(11) 𝑄2= 𝑈𝐴2 (𝑇𝑡2− 𝑇𝑠2)……….(12) Zona 3 𝑑𝑇𝑠3 𝑑𝑡 = 𝛼1(𝑇𝑠3+ 𝑇𝑠4) − 𝛼1(𝑇𝑠3+𝑇𝑠2) + 𝑄3 𝛼2……...(13) 𝑑𝑇𝑡2 𝑑𝑡 = 𝛽1(𝑇𝑡3+ 𝑇𝑡2) − 𝛽1(𝑇𝑡3+ 𝑇𝑡4) − 𝑄3 𝛽2……...(14) 𝑄3= 𝑈𝐴3 (𝑇𝑡3− 𝑇𝑠3)……….(15) Zona 4 𝑑𝑇𝑠4 𝑑𝑡 = 𝛼1(𝑇𝑠4+ 𝑇𝑠5) − 𝛼1(𝑇𝑠4+ 𝑇𝑠3) + 𝑄4 𝛼2...(16) 𝑑𝑇𝑡4 𝑑𝑡 = 𝛽1(𝑇𝑡4+ 𝑇𝑡3) − 𝛽1(𝑇𝑡4+ 𝑇𝑡5) − 𝑄4 𝛽2……...(17) 𝑄4= 𝑈𝐴4(𝑇𝑡4− 𝑇𝑠4)………...(18) Zona 5 𝑑𝑇𝑠5 𝑑𝑡 = 𝛼1(𝑇𝑠5+ 𝑇𝑠6) − 𝛼1(𝑇𝑠5+ 𝑇𝑠4) + 𝑄5 𝛼2…….(19) 𝑑𝑇𝑡5 𝑑𝑡 = 𝛽1(𝑇𝑡5+ 𝑇𝑡4) − 𝛽1(𝑇𝑡5+ 𝑇𝑡6) − 𝑄5 𝛽2……...(20) 𝑄5= 𝑈𝐴5 (𝑇𝑡5− 𝑇𝑠5)………..(21) METODE PENELITIAN Parameter Plant
Tabel 1 Parameter Heat Exchanger
Konstanta Nilai Satuan Keterangan
U 10.15 Kcal/( 𝑚2 𝑚𝑖𝑛𝑜 C) Overall Heat Transfer Dit 0.02093 m Diameter internal tube Det 0.02667 m Diameter eksternal tube Dis 0.03505 m Diameter internal shell L 9.04 m Total panjang pipa 𝝆𝒔 1 Kg/Lt Massa jenis shell 𝑪𝒑𝒔 1 Kcal/ 𝐾𝑔𝑜C Kapasitas kalor shell 𝝆𝒕 1 Kg/Lt Massa jenis tube 𝑪𝒑𝒕 1 Kcal/ 𝐾𝑔𝑜C Kapasitas kalor tube Delta L 1.808 m Panjang masing-masing pipa 𝑽𝒕 0.0006259 𝑚3 Volume tube 𝑽𝒔 0.0007267 𝑚3 Volume shell Desain Kontroler PI
Kontroler proporsional ditambah integral (PI) merupakan kontroler yang aksi kontrolernya mempunyai sifat proporsional dan integral terhadap sinyal kesalahan. Pada bagian ini akan dibahas mengenai prosedur perancangan kontroler proporsional ditambah integral untuk diterapkan pada plant orde pertama. Dengan menentukan nilai penguatan proporsional Kp dan waktu integral τi yang tepat diharapkan respon plant orde pertama sesuai dengan spesifikasi performansi dalam domain waktu yang diinginkan.
Gabungan aksi kontrol proporsional dan aksi kontrol integral membentuk aksi kontrol proporsional plus integral (controller PI). Gabungan aksi ini mempunyai keunggulan dibandingkan dengan masing-masing penyusunnya. Keunggulan utamanya adalah diperolehnya keuntungan dari masing-masing aksi kontrol dan kekurangan aksi kontrol yang satu dapat diatasi. Dengan kata lain elemen-elemen kontroler P dan I secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem dan menghilangkan ess.
Identifikasi Statis 𝑌𝑠𝑠 = 85 𝑋𝑠𝑠 = 2 Sehingga, 𝐾 =𝑌𝑠𝑠 𝑋𝑠𝑠= 85 2 = 42.5 𝐶(𝜏) = 0.632 𝑥 𝑠𝑡𝑒𝑎𝑑𝑦 𝑠𝑡𝑎𝑡𝑒 = 0.632 𝑥 85 = 53.72 𝜏 = 0.0036 𝜏∗= 𝜏 𝑘𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑎= 0.0036 1.5 = 0.0024 Permisalan : 𝜏 = 𝜏𝑖 𝜏∗= 𝜏𝑖 𝐾𝑥𝐾𝑝 𝐾𝑝= 𝜏𝑖 𝐾𝑥𝜏∗= 0.0036 42.5 𝑥 0.0024= 0.035 𝐾𝑖= 𝐾𝑝 𝜏𝑖 = 0.035 0.0036= 9.72
Desain Kontroler Fuzzy
Langkah-langkah perancangan kontroler fuzzy antara lain fuzzyfikasi, rule base, dan defuzzyfikasi.
Fuzzyfikasi
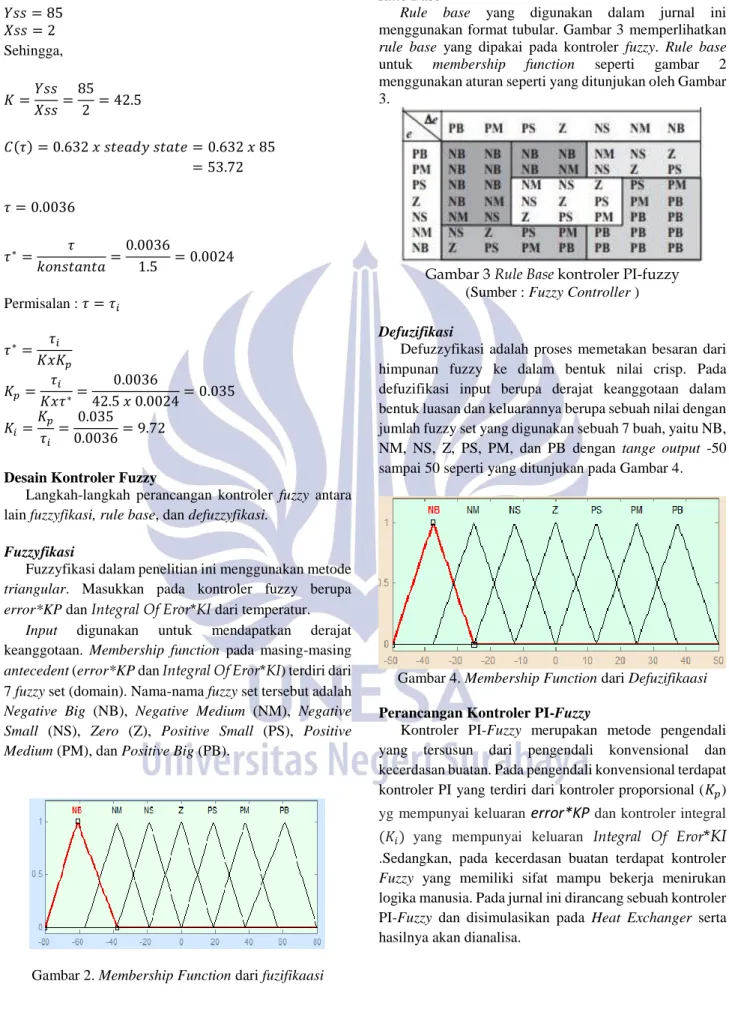
Fuzzyfikasi dalam penelitian ini menggunakan metode triangular. Masukkan pada kontroler fuzzy berupa error*KP dan Integral Of Eror*KI dari temperatur.
Input digunakan untuk mendapatkan derajat keanggotaan. Membership function pada masing-masing antecedent (error*KP dan Integral Of Eror*KI) terdiri dari 7 fuzzy set (domain). Nama-nama fuzzy set tersebut adalah Negative Big (NB), Negative Medium (NM), Negative Small (NS), Zero (Z), Positive Small (PS), Positive Medium (PM), dan Positive Big (PB).
Gambar 2. Membership Function dari fuzifikaasi
Rule Base
Rule base yang digunakan dalam jurnal ini menggunakan format tubular. Gambar 3 memperlihatkan rule base yang dipakai pada kontroler fuzzy. Rule base untuk membership function seperti gambar 2 menggunakan aturan seperti yang ditunjukan oleh Gambar 3.
Gambar 3 Rule Base kontroler PI-fuzzy (Sumber : Fuzzy Controller ) Defuzifikasi
Defuzzyfikasi adalah proses memetakan besaran dari himpunan fuzzy ke dalam bentuk nilai crisp. Pada defuzifikasi input berupa derajat keanggotaan dalam bentuk luasan dan keluarannya berupa sebuah nilai dengan jumlah fuzzy set yang digunakan sebuah 7 buah, yaitu NB, NM, NS, Z, PS, PM, dan PB dengan tange output -50 sampai 50 seperti yang ditunjukan pada Gambar 4.
Gambar 4. Membership Function dari Defuzifikaasi
Perancangan Kontroler PI-Fuzzy
Kontroler PI-Fuzzy merupakan metode pengendali yang tersusun dari pengendali konvensional dan kecerdasan buatan. Pada pengendali konvensional terdapat kontroler PI yang terdiri dari kontroler proporsional (𝐾𝑝) yg mempunyai keluaran
error*KP
dan kontroler integral (𝐾𝑖) yang mempunyai keluaran Integral Of Eror*KI .Sedangkan, pada kecerdasan buatan terdapat kontroler Fuzzy yang memiliki sifat mampu bekerja menirukan logika manusia. Pada jurnal ini dirancang sebuah kontroler PI-Fuzzy dan disimulasikan pada Heat Exchanger serta hasilnya akan dianalisa.33 Gambar 5 Simulasi Sistem Dengan Kontroler PI
Fuzzy
HASIL DAN PEMBAHASAN
Simulasi heat exchanger dengan menggunakan kontroler PI-Fuzzy dengan range eror*KP ((-80)-80),
integral of eror*KI ((-40)-40) dan output ((-50)-50).
Gambar 6 Hasil Simulasi Sistem Dengan Kontroler PI-Fuzzy Dengan Range Eror*KP ((-80)-80), Integral Of
Eror*KI ((-40)-40) dan Output ((-50)-50)
Pada Gambar 6 merupakan hasil simulasi dari kontroler PI-Fuzzy dengan range eror*KP ((-80)-80), integral of eror*KI ((-40)-40) dan output ((-50)-50), dari hasil tersebut didapatkan analisa sebagai berikut, dengan menggunakan kontroler PI-Fuzzy dengan set point tetap respon plant sangat mudah mengikuti set point yang sudah ditetapkan yaitu 850C karena tidak adanya gangguan atau beban pada plant tersebut, pada Gambar 6 terdapat overshoot mencapai 133.650C dan turun mendekati set point yang sudah ditetapkan dengan konstanta waktu () sebesar 24s, waktu tunak atau settling time (ts) dengan ts (± 2%) sebesar 212s, waktu tunda atau delay time (td) sebesar 21s, waktu naik atau rise time (tr) dengan tr (5%-95%) sebesar 21s dan dengan menggunakan kontroler PI-Fuzzy dengan range eror*KP 80)-80), integral of eror*KI ((-40)-40) dan output ((-50)-50) kontroler mumpunyai range kontrol antara suhu 23-1060C.
Simulasi heat exchanger dengan menggunakan kontroler PI-Fuzzy dengan range eror*KP ((-40)-40),
integral of eror*KI ((-40)-40) dan output ((-10)-10).
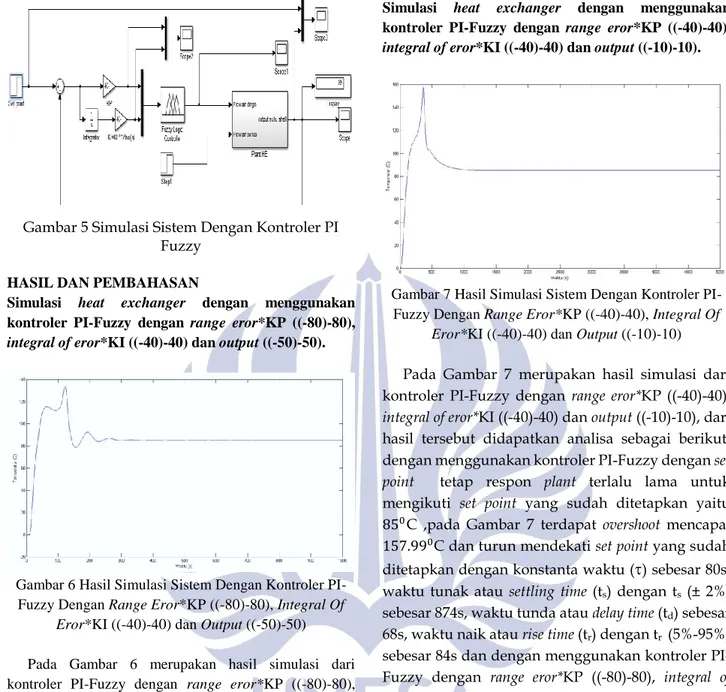
Gambar 7 Hasil Simulasi Sistem Dengan Kontroler PI-Fuzzy Dengan Range Eror*KP ((-40)-40), Integral Of
Eror*KI ((-40)-40) dan Output ((-10)-10)
Pada Gambar 7 merupakan hasil simulasi dari kontroler PI-Fuzzy dengan range eror*KP ((-40)-40), integral of eror*KI ((-40)-40) dan output ((-10)-10), dari hasil tersebut didapatkan analisa sebagai berikut, dengan menggunakan kontroler PI-Fuzzy dengan set point tetap respon plant terlalu lama untuk mengikuti set point yang sudah ditetapkan yaitu 850C ,pada Gambar 7 terdapat overshoot mencapai 157.990C dan turun mendekati set point yang sudah ditetapkan dengan konstanta waktu (
) sebesar 80s, waktu tunak atau settling time (ts) dengan ts (± 2%) sebesar 874s, waktu tunda atau delay time (td) sebesar 68s, waktu naik atau rise time (tr) dengan tr (5%-95%) sebesar 84s dan dengan menggunakan kontroler PI-Fuzzy dengan range eror*KP ((-80)-80), integral of eror*KI ((-40)-40) dan output ((-50)-50) kontroler mumpunyai range kontrol antara suhu 39-2180C.Analisa Simulasi Dengan Set Point Bervariasi Menggunakan Kontroler PI-Fuzzy.
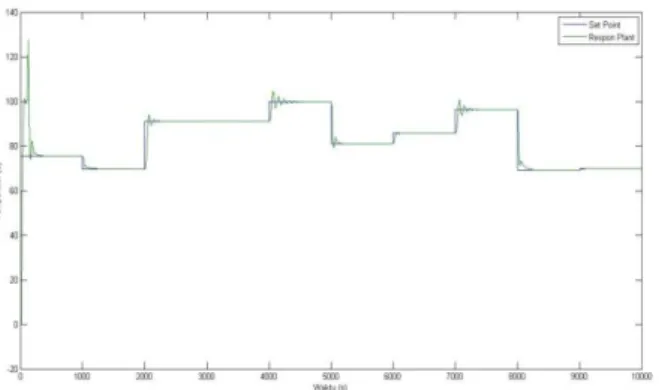
Analisa kontroler pada heat exchanger dengan set point bervariasi bertujuan untuk mengetahui seberapa baik kontroler dapat beradaptasi dengan input yang berubah-ubah sebelum dilakukannya analisa terhadap perberubah-ubahan beban. Pada Gambar 8 menunjukkan hasil simulasi sistem dengan kontroler PI-Fuzzy dengan set point yang bervariasi.
Gambar 8 Hasil Simulasi Sistem Dengan Kontroler PI-Fuzzy Dengan Set Point Bervariasi
Pada Gambar 8 merupakan hasil simulasi dari kontroler PI-Fuzzy dengan set point bervariasi dengan nilai random antara 680C - 1020C , dari hasil tersebut didapatkan analisa sebagai berikut, dengan menggunakan kontroler PI-Fuzzy dengan set point bervariasi respon plant dapat mengikuti set point karena tidak adanya gangguan atau beban pada plant tersebut menunjukkan bahwa dengan memberi set point yang bervariasi kontroler masih dapat bekerja dengan baik, pada Gambar 8 terdapat overshoot mencapai 127.360C dan turun mendekati set point sebesar 75.440C dengan konstanta waktu () sebesar 24s, waktu tunak atau settling time (ts) dengan ts (± 2%) sebesar 248s, waktu tunda atau delay time (td) sebesar 21s dan waktu naik atau rise time (tr) dengan tr (5%-95%) sebesar 22s dan pada saat terjadi berubahan set point antara 75.440C - 69.590C memerlukan waktu 61s untuk mencapai ts (± 2%) menunjukkan bahwa kontroler berjalan cukup cepat pada saat terjadi perubahan set point.
Analisa Simulasi Dengan Perubahan Beban
Menggunakan Kontroler PI-Fuzzy.
Analisa kontroler pada heat exchanger dengan perubahan beban bertujuan untuk mengetahui seberapa baik kontroler dapat beradaptasi dengan perubahan beban. Pada Gambar 9 menunjukkan hasil simulasi sistem dengan kontroler PI-Fuzzy dengan perubahan beban.
Gambar 9 Hasil Simulasi Sistem Dengan Kontroler PI-Fuzzy Dengan Perubahan Beban
Pada Gambar 9 merupakan hasil simulasi dari kontroler PI-Fuzzy dengan diberikan perubahan beban dari hasil tersebut didapatkan analisa sebagai berikut, dengan menggunakan kontroler PI-Fuzzy dengan terjadinya perubahan beban respon plant tetap dapat mengikuti set point awal ,dari Gambar 9 menunjukkan bahwa dengan memberi perubahan beban kontroler masih dapat bekerja dengan baik, pada Gambar 9 pada saat terjadi berubahan beban aliran fluida panas 1.5015 𝑚3/menit menjadi 3 𝑚3/menit memerlukan waktu 151s untuk mencapai ts (± 2%) menunjukkan bahwa kontroler berjalan cukup cepat pada saat terjadi perubahan beban.
PENUTUP Simpulan
Dari hasil perancangan sistem pengaturan temperature pada Heat Exchanger dapat diambil kesimpulan sebagai berikut :
Sistem Pengaturan temperatur fluida mengguanakan PI-Fuzzy pada heat exchanger tipe shell and tube dapat bekerja dengan baik, dapat dijelaskan dari hasil analisa pada setpoint tetap menunjukkan respon mencapai steady state pada temperatur 850C dengan waktu tunak atau settling time (ts) sebesar 212s ,pada set point bervariasi respon plant juga dapat mengikuti set point dengan baik dengan waktu 61s pada saat terjadi perubahan set point dan pada saat terjadi perubahan beban memerlukan waktu 151s untuk kembali ke keadaan steady state.
Pada pengaturan kontroler fuzzy range membership function sangat berpengaruh terhadap hasil output dari fuzzy tersebut seperti pada kontroler PI-Fuzzy dengan range eror*KP ((-80)-80), integral of eror*KI ((-40)-40) dan output ((-50)-50) kontroler mumpunyai range kontrol antara suhu 23-1060C mempunyai waktu steady state sebesar 212s sedangkan kontroler PI-Fuzzy dengan range eror*KP ((-40)-40), integral of eror*KI ((-40)-40) dan output ((-10)-10) kontroler mumpunyai range kontrol lebih besar antara suhu 39-2180C tetapi mempunyai waktu steady state lebih lambat sebesar 874s
Saran
Saran untuk penelitian selanjutnya diharapkan dilakukan dengan menggunakan real plant dengan proses identifikasi terlebih dahulu sedangkan dari segi kontrolnya dapat ditambahkan kontrol adaptif agar kontroler dapat beradaptasi dengan kondisi apapun.
35
DAFTAR PUSTAKA
Belinda dan Mohd Nor B. 2010.“Modelling of A Hot Water Drum and Heat Exchanger Process Kontrol Training System “,Control Automation Robotics & Vision (ICARCV), pp. 1489-1494, 2010.
Carlos A. Smith, “ Automated Continuous Process Control”, John Wiley & Sons, Inc. 2002, pp137-161 Ekasari , Rr Rahmawati Putri. 2014. “Pengendalian
Temperatur Fluida pada Heat Exchanger Dengan Menggunakan Jarian Saraf Tiruan Prediktif” Tugas Akhir Jurusan Elektro FT ITS.
Fazlur Rahman, M.H.R. and Devanathan, R, “Modelling a Dynamic Feedback Linearisation of a Heat Exchanger Model”, Proceedings of IEEE International Conference on Control and applications Vol. 3 pp 1801-1806, Aug 1994.
Flores T , Antonio. 2002 “Modelling of a Dynamic Countercurrent Tubular Heat Exchanger”. Gayatri Kuchi, Valery Ponyavin, Yitung Chen, Steven
Sherman, Anthony Hechanova, “Numerical modeling of high-temperature shell-and tube heat exchanger and chemical decomposer for hydrogen production”, International Journal of Hydrogen Energy. Elsevier Ltd. 2008. pp2460-5468
Manikandan R. dan Vinodha R. “Multiple Model Based Adaptive Control for Shell and Tube Heat Exchanger Process”International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 5 (2016) pp 3175-3180.
Masturi, Fathimah Ekasari. 2014. “Pengendalian Temperatur Fluida pada Heat Exchanger Dengan Menggunakan Algoritma Model Predictive Contol (MPC)” Tugas Akhir Jurusan Elektro FT ITS. Nainggolan, Jannus Maurits. Logika Fuzzy (Fuzzy Logic)
: Teori dan Penerapan Pada Sistem Daya (Kajian
Pengaruh Induksi Medan Magnet).
(http://member.unila.ac.id/~ftelektro/lab/ltpe/dokume n/Fuzzy%20Logic%20Paper.doc Kamis, 10 Maret 2016).
Ogata, Katsuhito. 1997. Modern Control Engineering rd 3 Edition. Prentice Hall : New Jersey.
Reznik, Leonid. 1999. Fuzzy Controllers. Australia : Newnes.