25
3. CARA KERJA
Pada bab ini saya akan menguraikan tentang cara kerja dan analisa rangkaian baik secara blok diagram, analisa secara mendetail, maupun analisa secara keseluruhan, perancanagan alat, serta menguji coba alat yang telah dibuat.
3.1 Analisa Rangkaian Secara Blok Diagram
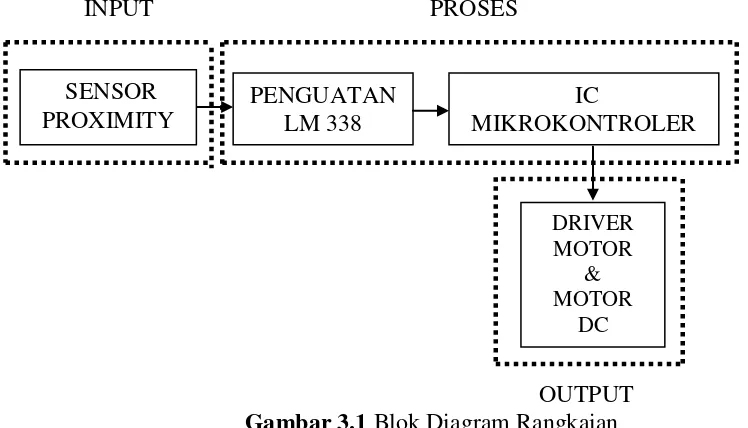
Dalam pengoperasian alat pastilah mempunyai bagian-bagian yang meliputi masukan (Input), proses dan keluaran (Output). Berikut dibawah ini adalah gambaran secara blok diagram dari masing-masing masukkan, proses, dan keluaran yang terdapat pada pengoperasian alat ini.
INPUT PROSES
berada diatas garis putih maka Photodioda akan menerima banyak cahaya pantulan. Berikut adalah ilustrasinya:
Gambar 3.2 Prinsip Kerja Sensor Proximity
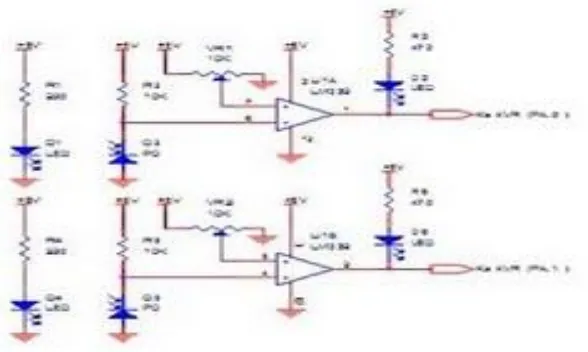
Sifat dari photodioda adalah jika semakin banyak cahaya yang diterima, maka nilai resistensinya semakin kecil. Dengan melakukan modifikasi maka besaran tersebut dapat diubah menjadi tegangan, sehingga jika sensor berada digaris hitam maka tegangan keluaran sensor akan kecil demikian pula sebaliknya. Berikut adalah gambaran rangakaian sensor Proximity yang digunakan pada robot ini:
Gambar 3.3 Rangkaian Sensor Proximity
resistor VR.Tegangan dari VR inilah yang kita atur agar sensor proximity dapat menyesuaikan dengan kondisi cahaya ruangan.
3.1.2 Blok Proses
Pada blok proses ini berisikan sebuah otak pengendali dari keseluruhan kinerja rangkaian yaitu IC Mikrokontroler ATMega, yang tentunya dilengkapai dengan program yang ada sebelumnya pada IC tersebut. Blok proses ini juga dibantu dengan adanya LM339N sebagai penguat tegangan pada IC Mikrokontroler.
3.1.3 Blok Output
Pada blok output (keluaran) ini yang berisikan Driver Motor dan Motor DC. Yaitu driver motor yang berfungsi untuk menggerakan 2 buah motor DC, kita gunakan H-brige driver L298N, yang mampu memberikan arus maksimal 1A ketiap motor. Input dari ic L298N ada 6 jalur teridiri dari input data arah pergerakan motor dan input untuk PWM (Pluse Widht Modulation) untuk mengatur kecepatan motor, pada pwm inilah akan diberikan lebar pulsa yang bervariasi dari mikrokontroler.
Dan motor DC meruapakan blok output, dimana outputnya berupa gerakan motor. Motor tergantung dengan driver motor yaitu pin output pada motor driver, dimana gerakan motor bergantung pada output dari driver motor yang diberikan kepada motor DC. Masing-masing motor terdapat dua inputan, yaitu jika diberi tegangan berbeda akan menyebabkan motor berputar satu arah, jika tegangan yang diberikan di balik maka motor akan berputar berlawanan arah. Ara-arah ini akan menentukan gerakan robot untuk maju, mundur ataupun belok.
3.2 Analisa Rangkaian Secara Mendetail
Dari masing-masing sensor didaptakan sebuah signal atau data yang merupakan inputan yang akan dikirim ke mikrokontroler, didalam mikrokontroler ini signal akan diproses hingga menjadi data baru seperti Fuzy Logic. Dari mikrokontroler akan mengeluarkan signal yang di teruskan menuju IC L298N yang berfungsi sebagai H-Brige atau sebagai driver motor DC. Pada IC L298N inilah yang akan menentukan motor DC mau bergerak, maju, kanan, kiri.
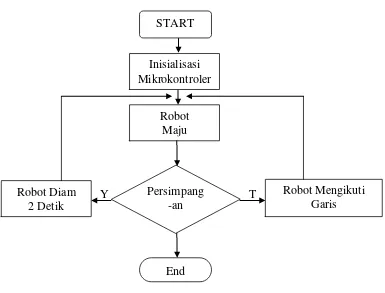
3.3 Perancangan Secara Software
Y T
Gambar 3.6 Diagram Alur
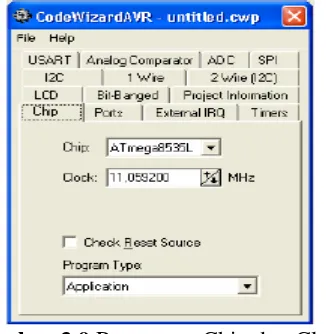
Software yang digunakan untuk pembuatan listing program dan mengkompile file ASM mejadi HEX digunakan software Code VisionAVR C Compiler, dengan langkah2-langkah sebagai berikut:
Gambar 3.7 Code VisionAVR
Dalam penulisan ini digunakan bahasa C sebagai basic program yang nantinya akan di flash ke dalam IC type ATMega 8535. Dibawah ini merupakan tahapan-tahapan cara menggunakan CodeVisionAVR C Compiler, yaitu :
START
Robot Maju
Robot Diam 2 Detik
Robot Mengikuti Garis Persimpang
-an
1. Jalankan CodeVisionAVR, kemudian tekan File New, Pilih Project
Gambar 3.8 Project Baru
2. “Do you want to use the Code WizardAVR?” Mengklik yes
3. Memilih Chip yang digunakan, chip : Atmega 16,clock : 11.059200 MH
Gambar 3.9 Penentuna Chip dan Clock
4. Lakukan setting sebagai berikut :
Port : Port C sebagai Output dan Port A dan PORT D sebagai Input
Pullup
Timers : Timer 0 dengan Clock Value 10,800 KHz, aktifkan Overflow Interrupt
Gambar 3.11 Pengaktifan Overflow Interupt
5. Pilih File Generate, save and Exit 6. Buatlah sorce code seperti pada lapiran A
7. Setelah selesai membuat source code, pilih Setting Programmer 8. Pilih AVR Chip Programmer Type : Kanda System STK200+/300 dan
pilih Printer Port pada LPT1 : 378h
Gambar 3.12 Pengaktifan Pada Chip.
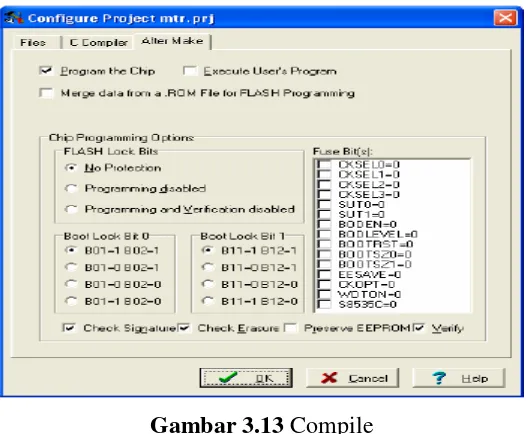
9. Pilih Project Configure, kemudian pilih menu After Make dan aktifkan Program the Chip. Klik OK jika sudah.
Gambar 3.13 Compile
10. Untuk meng-compile project, klik Project Make
11. Jika tidak ada error maka file siap didownload ke chip. Pastikan koneksi kabel downloader dan chip sudah terpasang dengan benar.
12. Nyalakan power supply dan klik Program. Tunggu hingga proses download selesai.
3.4 Cara Penggunaaan Dan Uji Coba Alat
3.4.1 Cara Penggunaan
Berikut ini adalah langkah-langkah penggunaan robot pengantar surat kabar di loby perusahaan berbasis ATMega8535. Letakan Robot di arena.
1. Pasang baterai.
2. Tekan tombol swicth ON. 3. Robot berjalan maju.
4. Robot akan mendeteksi garis, robor berbelok sesuai algoritma dan robot akan berhenti beberapa detik jika menemukan perempatan. 5. Untuk selesai menjalankan robot tekan tombol OFF.
3.4.2 Uji Coba Alat
Untuk melakukan pengambilan data pada sensor line, pertama saya mengecek sensor mana saja yang terkena garis baru ke tahap selanjutnya yaitu algoritma dari sensornya.
Gambar 3.14 Kemungkinan Sensor yang Terkena Garis
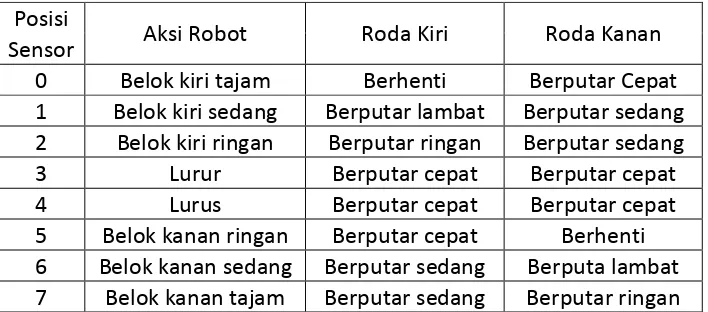
Setelah mengetahui kemungkinan-kemungkinan posisi sensor, maka selanjutnya harus didefinisikan aksi dari setiap kondisi tersebut. Perhatikan tabel berikut:
Tabel 3.1 Aksi Pergerakan Robot
Posisi
Aksi Robot Roda Kiri Roda Kanan Sensor
Tabel 3.2 Data Pengamatan Sensor Proximity
No Sensor Arah Robot/Roda Logika Sensor
1 S0 Kiri patah tajam F 3
2 S0,S1 Kiri patah F3 F7
3 S1 kiri laju pelan F7
4 S1,S2 kiri laju pelan F7 F2
5 S2 kiri laju pelan F2
6 S2,S3 kiri laju pelan F2 F6
7 S3 Lurus F6
8 S3,S4 Lurus kecepatan max F6 F4
9 S4 Lurus F4
10 S4,S5 kanan laju pelan F4 FC 11 S5 kanan laju pelan FC 12 S5,S6 kanan Laju Pelan Fc C8 13 S6 kanan laju pelan C8 14 S6,S7 Kanan patah C8 C7 15 S7 Kanan patah tajam C7 16 S2 - S5 Berhenti 2 detik F2 F6 F4 FC