DISERTASI
Studi Karakteristik
Hambatan dan Seakeeping
Kapal Trimaran pada
Perairan Tenang dan Bergelombang
RICHARD BENNY LUHULIMA NRP: 4112301002
PROMOTOR : Prof. Ir. I Ketut Aria Pria Utama, M.Sc., Ph.D. C0- PROMOTOR : Aries Sulisetyono, ST., MA.Sc., Ph.D.
PROGRAM DOKTORAL
FAKULTAS TEKNOLOGI KELAUTAN
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
DISERTASI
Studi Karakteristik
Hambatan dan Seakeeping
Kapal Trimaran pada
Perairan Tenang dan Bergelombang
RICHARD BENNY LUHULIMA NRP: 4112301002
PROMOTOR : Prof. Ir. I Ketut Aria Pria Utama, M.Sc., Ph.D. K0-PROMOTOR : Aries Sulisetyono, ST., MA.Sc., Ph.D.
PROGRAM DOKTORAL
FAKULTAS TEKNOLOGI KELAUTAN
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
LEMBAR PENGESAHAN DISERTASI
STUDI KARAKTERISTIK HAMBATAN DAN SEAKEEPING
KAPAL TRIMARAN PADA
PERMRANTENANGDANBERGELOMrnANG
Disertasi disusun untuk: memenuhi salah satu syarat memperoleh gelar DOKTOR (Dr.)
Di
Institut Teknologi Sepuluh Nopember Surabaya Oleh: RJCHARD BENNY LUHULIMA
NRP: 4112301002
Disetujui oleh Tim Penguji Disertasi:
Tanggal Ujian : 14 Desember 2016 Peri ode Wisuda: Maret 2017
1 1 Prof. Ir. I Ketut Aria Pria Utamla, M.Sc, Ph.D
I
Promotor NIP. 1967040 6199203 1 0012 I Aries Sulisetyono, ST, MA.Sc, Ph.D
I
Ko-Promotor NIP. 19710320 199512 1 0023
!
Prof. Ir. Daniel M. Rosyid, Ph.DI
an. Penguji Internal NIP. 19610702 198803 1 0034 f Dr. Ridho Hantoro, ST., MT
I
Penguji Internal NIP 19761223 200501 1 0015 I Prof. Dr. Ir. Yanuar, M.Eng., M.Sc
ii
iii
Studi Karakteristik Hambatan dan Seakeeping
Kapal Trimaran pada
Perairan Tenang dan Bergelombang
Nama Mahasiswa : Richard Benny Luhulima NRP : 4109 301 701
Promotor : Prof. Ir. I Ketut Aria Pria Utama, M.Sc, Ph.D Ko-Promotor : Aries Sulisetyono, ST, MA.Sc., Ph.D
ABSTRAK
Penggunaan lambung tunggal dan banyak untuk aplikasi kapal penumpang mengalami pasang surut dimana hal itu berkaitan dengan besarnya hambatan, stabilitas kapal, dan dinamika gerak kapal (seakeeping). Kapal lambung tunggal cenderung memiliki hambatan yang besar dan kurang stabil tetapi menunjukan kareteristik seakeeping yang sangat baik. Sementara itu, kapal lambung banyak (trimaran) mampu menghasilkan hambatan lebih kecil, lebih stabil kearah melintang, tetapi memiliki karateristik seakeeping yang kurang baik terutama bentuk katamaran pada perairan bergelombang (oblique waves). Penelitian ini bertujuan untuk memilih kapal lambung tiga (trimaran) yang optimal untuk perairan tenang dan bergelombang. Perairan Maluku termasuk tipikal perairan yang relatif tenang diantara pulau-pulau yang berdekatan dan sangat bergelombang untuk laut yang terbuka dan jarak antara pula-pulau yang cukup berjauhan. Penelitian difokuskan pada perhitungan hambatan dan dilanjutkan dengan perhitungan seakeeping untuk perairan tenang dan bergelombang. Penelitian tentang hambatan dilakukan dengan teknik CFD menggunakan CFX-code dan penelitian tentang seakeeping dilakukan dengan teknik CFD (ANSYS AQWA) dan pengujian model (eksperimental) di Laboratorium Hidrodinamika FTK-ITS.
Hasil kajian melalui pengujian fisik dan numerik menunjukkan bahwa interferensi komponen hambatan pada lambung trimaran terhadap perubahan jarak antara lambung secara melintang (S/L). Semakin kecil jarak antara lambung trimaran (S/L) maka semakin besar hambatan dan interferensi/interaksi komponen hambatan yang terjadi. Kemudian korelasi yang terlihat antara hambatan dan seakeeping adalah adanya perbedaan karena adanya interferensi semakin besar
iv
interferensi maka gerakan heave dan pitch semakin berkurang. Namun inteferensi tidak mempengaruhi terhadap gerakan roll. Hasil analisa pengujian dan numerik menunjukkan bahwa pada S/L=0,4 menunjukkan hasil yang sangat baik untuk permorma hambatan dan seakeeping.
Hasil-hasil didapat berupa besaran hambatan dan karateristik seakeeping dari moda kapal trimaran. Selanjutnya dibandingkan dengan published data yang verified dari berbagai referensi. Hasil penelitian ini diharapkan dapat memperkaya dan memperkuat data base dalam mempresentasikan korelasi hambatan terhadap olah gerak pada lambung kapal trimaran dan selanjutnya dapat diaplikasikan secara lansung dalam perhitungan hambatan dan seakeeping yang digunakan pada tahapan desain (preliminary design).
v
Study of Resistance and Seakeeping Characteristics of Trimaran
Vessel at Calm and Wavy Waters
Name : Richard Benny Luhulima NRP : 4109 301 701
Promotor : Prof. Ir. I Ketut Aria Pria Utama, M.Sc, Ph.D Co-Promotor : Aries Sulisetyono, ST, MA.Sc., Ph.D
ABSTRACT
The use of single hull and many applications for passenger ships have ups and downs where it is related to the resistance and propulsion of ships, the stability of the ship, and the ship motion dynamics (seakeeping). Single hull ships tend to have a huge resistance and less stable but showed excellent seakeeping characteristics. Meanwhile, the multiple hull of ship (trimaran) capable of producing a hitch and the driving force is smaller, more stable towards transverse, but has a characteristic, seakeeping poor especially catamarans in wavy waters shape (oblique waves). This study aims to select three ship hull (trimaran) is optimal for calm and wavy waters. Maluku waters including waters typically relatively calm among the islands adjacent and wavy for the open sea and also the distance between the islands are quite far apart. The study focused on the calculation of the resistance used data from previous studies, and continued with seakeeping calculations for calm waters and wavy. Research on resistance to do with the technique using CFX CFD-code and research on seakeeping done by using CFD (ANSYS AQWA) and testing model (experiment) in Hydrodynamic Laboratory of FTK-ITS.
The study results through physical testing and numerical show that the interference component of a drag on the hull trimaran to changes in the distance between the hull transverse (S/L). The smaller the distance between the hull trimaran (S/L), the greater the obstacles and interference/interaction component of resistances that occur. Then correlation was seen between the resistance and seakeeping are any differences due to their greater interference interference then heave and pitch motions decreases. But the interference did not affect the roll motion. Experiment and numerical analysis results show that the S/L = 0.4 showed excellent results for permorma resistance and seakeeping.
vi
The results obtained in the form of massive obstacles and seakeeping characteristics of ships mode of trimaran. Furthermore, compared with the published data is verified from various references. The results of this study are expected to enrich and strengthen the correlation data base to present obstacles to navigation on a trimaran hull and can then be applied directly in the calculation of resistance and seakeeping used at the design phase (preliminary design).
vii
KATA PENGANTAR
Puji syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa, bahwa atas berkat Rahmat dan Hidayah-Nya, maka tugas penyusunan Disertasi dengan judul:
“
Studi Karakteristik Hambatan dan Seakeeping Kapal Trimaran
pada Perairan Tenang dan Bergelombang
” dapat diselesaikan denganbaik untuk persyaratan akademik pada program Doktor Fakultas Teknologi Kelautan, ITS.
Aries Sulisetyono, ST., MA.Sc., Ph.D selaku Ko-Promotor yang telah meluangkan waktu untuk membimbing mulai dari awal hingga selesainya desertasi ini.
Disertasi ini merupakan rangkaian penelitian yang bertujuan untuk memilih kapal lambung tiga (trimaran) yang optimal untuk perairan tenang dan bergelombang. Perairan Maluku termasuk tipikal perairan yang relatif tenang diantara pulau-pulau yang berdekatan dan sangat bergelombang untuk laut yang terbuka dan jarak antara pula-pulau yang cukup berjauhan. Penelitian difokuskan pada perhitungan hambatan menggunakan data dari penelitian sebelumnya, dan dilanjutkan dengan perhitungan seakeeping untuk perairan tenang dan bergelombang. Penelitian tentang hambatan dilakukan dengan teknik CFD menggunakan CFX-code dan penelitian tentang seakeeping dilakukan dengan teknik CFD (ANSYS AQWA) dan pengujian model (eksperimental) di kolam uji (towing tank). Hasil-hasil yang diharapkan adalah berupa besaran hambatan yang efisien dan karateristik seakeeping dari moda kapal trimaran. Selanjutnya dibandingkan dengan published data yang ada dari berbagai referensi. Kesimpulan akhir dari penelitian ini mencakup perhitungan besarnya hambatan yang efisien dan karateristik sakeeping. Dalam proses penyusunan disertasi ini, penulis memperoleh masukan dan sumbangsih pemikiran dari berbagai pihak, sehingga penulis menyampaikan pengahargaan dan terima kasih sebesar besarnya kepada:
viii
2. Bapak Prof. Ir. Djauhar Manfaat, M.Sc., Ph.D selaku tim penguji dari internal, Bapak Dr. Ridho Hantoro, ST., MT., selaku tim penguji dari ekternal Fakultas, Bapak Prof. Dr. Ir. Yanuar, M.Eng., M.Sc, selaku tim penguji dari ekternal atas segala saran perbaikan desertasi ini.
3. Bapak Prof. Ir. Djauhar Manfaat, M.Sc., Ph.D., Direktur Program Pascasarjana, ITS, beserta Staf, yang telah mendukung kelancaran program studi.
4. Direktur Program Pascasarjana Fakultas Teknologi Kelautan, ITS, beserta staf, yang telah membantu berbagai kelancaran dukungan pelaksanaan program studi.
5. Rektor UNPATTI, Prof Dr M. J Sapteno SH M.Hum, yang telah memberikan kesempatan dan dukungan untuk mengikuti studi lanjut.
6. Dekan Fakultas Tektik UNPATTI beserta seluruh rekan Staf Pengajar yang telah memberikan dorongan dan motivasi untuk penyelesain studi
7. Dr. Ir. Marcus Tukan dan Ir. J. Nanlohy M.Eng yang selalu membatu dan memberi dukungan moril untuk memperlancar studi.
8. Rekan-rekan kerja di Laboratorium Hidrodinamika FTK-ITS, Surabaya, yang telah membantu pelaksanaan kegiatan eksperimen uji hidrodinamika.
9. Secara khusus terimakasih yang amat tulus dan mendalam kepada kedua kedua orang tua dan kedua mertua. Selanjutnya yang tak terlupakan istri tercinta, Monahelga Latumeten/L; kedua anak tersayang, Vinsa Delia Luhulima, Vrigaria Luhulima dan Krisvando Latumeten dengan ikhlas secara terus menerus memberikan dorongan moril dan do’a, sehingga penulis dapat menyelesaikan penyusunan Disertasi ini.
Akhir kata penulis berharap semoga disertasi ini dapat bermanfaat bagi pengembangan ilmu pengetahuan dan teknologi khususnya di bidang teknologi kelautan.
Surabaya, Desember 2016
ix
DAFTAR ISI
LEMBAR PENGESAHAN i
ABSTRAK iii
ABSTRACT v
KATA PENGANTAR vii
DAFTAR ISI ix
DAFTAR TABEL xiii
DAFTAR GAMBAR xvii
DAFTAR SIMBOL xxiii
BAB I PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 8
1.2.1 Interferensi Lambung Trimaran 9
1.2.2 Interferensi Gelombang di antara Lambung Trimaran 10 1.2.3 Interferensi Aliran terhadap Karakteristik Seakeeping 11
1.3 Tujuan dan Manfaat Penelitian 11
1.3.1 Tujuan Penelitian 11
1.3.2 Manfaat Penelitian 12
1.4 Batasan Masalah 12
1.5 Orisinalitas dan Kontribusi Penelitian 13
BAB II TINJAUAN PUSTAKA 15
2.1 Umum 15
2.2 Teori Hambatan Kapal 18
2.2.1 Komponen Hambatan 18
2.2.2 Hambatan Gesek 22
2.2.3 Hambatan Sisa 24
2.2.4 Hambatan Viskos 24
2.2.5 Hambatan Gelombang 24
2.2.6 Hambatan Sibakan Gelombang (Spray Resistance) dan Gelombang Pecah (Wave Breaking)
x
2.3 Hambatan Kapal Trimaran 25
2.4 Perhitungan dan Pengukuran Hambatan Kapal 26
2.4.1 Analisa Pengujian Hambatan Kapal 28
2.4.2 Analisis CFD (computational fluid dynamic) 29
2.5 Analisa Seakeeping 33
2.6 Response Amplitude Operator 40
2.7 Respon Gerakan Kapal 43
2.8 Spektrum Gelombang JONSWAP 47
2.9 Review Hasil Penelitian Terdahulu 49
BAB III METODOLOGI PENELITIAN 61
3.1 Umun 61
3.2 Metode Pengujian di Towing Tank 64
3.2.1 Pengujian Hambatan 64
3.2.2 Pengujian Seakeeping 67
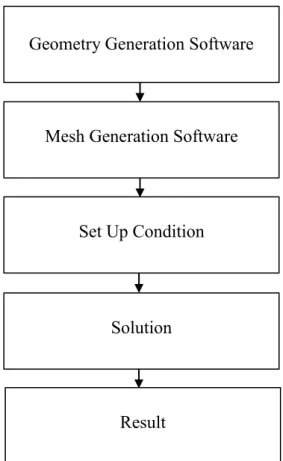
3.3 Simulasi CFD (Computational Fluid Dynamics) 73
3.3.1 ANSYS CFX 73
3.3.2 ANSYS AQWA 75
3.3.2.1 Metode Diferensial Hingga 76
3.3.2.2 Metode Difraksi Hidrodinamika (HMD) Olah Gerak Kapal
76
BAB IV PRESENTASI HASIL PENGUJIAN DAN KOMPUTASI
NUMERIK HAMBATAN 79
4.1 Komputasi Hambatan 79
4.1.1 Hasil Pengujian 79
4.1.2 Perbandingan Pengujian Koefisien Komponen Hambatan
pada Trimaran 83
4.1.3 Hasil Komputasi CFD 85
4.1.4 Perbandingan Komputasi CFD Koefisien Komponen
Hambatan pada Trimaran 93
xi
4.3 Tekanan (Presure) di antara Lambung 102
BAB V PRESENTASI HASIL PENGUJIAN DAN KOMPUTASI
NUMERIK SEAKEPING 117
5.1 Hasil Pengujian Laboratorium Hidrodinamika 117
5.1.1 Pengujian dengan Kondisi diam (Fr=-0) 117
5.1.2 Perhitungan Pada Kecepatan dinas (Fr=0.21) 121
5.2 Hasil Komputasi Seakeeping CFD 126
5.2.1 Perhitungan dengan posisi diam (v=0) 131
5.2.2 Perhitungan Pada Kecepatan dinas (Fr=0.21) 144
5.3 Root Mean Square 157
5.3.1 RMS pada kondisi diam (Fr=0) 157
5.3.2 RMS pada kondisi Kecepatan dinas (Fr=0.21) 161
BAB VI PEMBAHASAN 165
6.1 Komponen Hambatan Viskos dan Hambatan Gelombang 165 6.2 Pengaruh Konfigurasi Jarak Lambung Secara Melintang (S/L) 166
6.3 Diskusi Hasil Komputasi dan Eksperimen 166
6.3.1 Komponen Hambatan Total 166
6.3.2 Komponen Hambatan Viskos 170
6.3.3 Komponen Hambatan Gelombang 174
6.4 Interferensi Komponen Hambatan 179
6.4.1 Interferensi Hambatan Viskos 180
6.4.2 Interferensi Hambatan Gelombang 181
6.4.3 Validasi CFD 184
6.4.4 Kelemahan Metode CFD 184
6.5 Perbandingan Seakeeping RAO Hasil Pengujian dan Komputasi CFD
185
6.7 Korelasi Hambatan dan Seakeeping 199
BAB VII KESIMPULAN DAN SARAN 207
xii
7.2 Seakeping 208
7.3 Korelasi antara Hambtan dan Seakeeping 209
7.4 Saran 209
DAFTAR PUSTAKA 211
LAMPIRAN I HASIL SIMULASI HAMBATAN CFD 219
LAMPIRAN II HASIL PENGUJIAN HAMBATAN TOWING TANK 257
LAMPIRAN III HASIL SIMULASI SEAKEEPING CFD 269
LAMPIRAN IV HASIL PENGUJIAN SEAKEEPING TOWING TANK 281
xiii
DAFTAR TABEL
Tabel 2.1. Persamaan gerakan pada kapal 36
Tabel 2.2 Rangkuman Penelitian 52
Tabel 3.1. Program pengujian (tank test) 71
Tabel 4.1 Program pengujian (tank test) 80
Tabel 4.2 Koefisien Hambatan Total (Pengujian) 80
Tabel 4.3. Koefisien Hambatan Viskos (Pengujian) 81
Tabel 4.4 Koefisien Hambatan Gelombang (Pengujian) 81
Tabel 4.5. Katerakteristik jumlah mesh dan node 89
Tabel 4.6. Grid independence pada CFD 90
Tabel 4.7. Koefisien hambatan total (CFD) 90
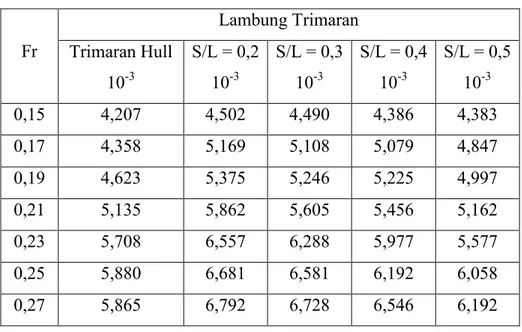
Tabel 4.8. Koefisien hambatan viskos (CFD) 91
Tabel 4.9. Koefisien hambatan Gelombang (CFD) 91
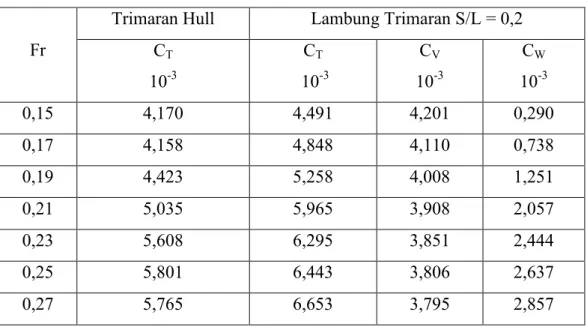
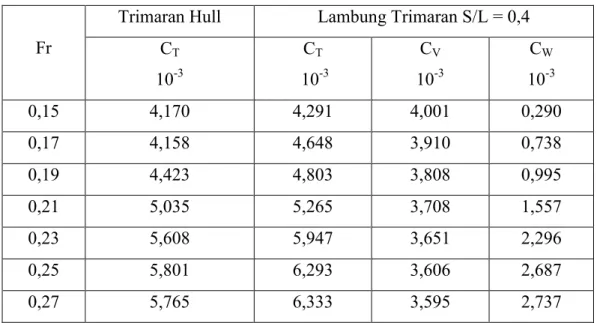
Tabel 4.10 Koefisien Hambatan Kapal Trimaran S/L=0,2 95 Tabel 4.11 Koefisien Hambatan Kapal Trimaran S/L=0,3 97 Tabel 4.12 Koefisien Hambatan Kapal Trimaran S/L=0,4 99 Tabel 4.13 Koefisien Hambatan Kapal Trimaran S/L=0,5 101
Tabel 4.14 Distribusi tekanan pada Fr = 0,15 103
Tabel 4.15 Distribusi tekanan pada Fr = 0,17 103
Tabel 4.16 Distribusi tekanan pada Fr = 0,19 103
Tabel 4.17 Distribusi tekanan pada Fr = 0,21 104
Tabel 4.18 Distribusi tekanan pada Fr = 0,23 104
Tabel 4.19 Distribusi tekanan pada Fr = 0,25 104
Tabel 4.20 Distribusi tekanan pada Fr = 0,27 105
Tabel 5.1 RAO S/L=0,2 pada Fr=0 (Pengujian) 117
Tabel 5.2 RAO S/L=0,3 pada Fr=0 (Pengujian) 118
Tabel 5.3 RAO S/L=0,4 pada Fr=0 (Pengujian) 118
xiv
Tabel 5.5 RAO S/L=0,2 pada Fr=0,21 (Pengujian) 122
Tabel 5.6 RAO S/L=0,3 pada Fr=0,21 (Pengujian) 122
Tabel 5.7 RAO S/L=0,4 pada Fr=0,21 (Pengujian) 123
Tabel 5.8 RAO S/L=0,5 pada Fr=0,21 (Pengujian) 123
Tabel 5.9 Titik Point Mass 128
Tabel 5.10 Meshing 129
Tabel 5.11 set up gelombang 130
Tabel 5.12 set up Kecepatan Kapal 130
Tabel 5.13 RAO Heave dengan S/L=0,2 pada Fr=0 131
Tabel 5.14 RAO Pitch dengan S/L=0,2 pada Fr=0 132
Tabel 5.15 RAO Roll dengan S/L=0,2 pada Fr=0 132
Tabel 5.16 RAO Heave dengan S/L=0,3 pada Fr=0 135
Tabel 5.17 RAO Pitch dengan S/L=0,3 pada Fr=0 135
Tabel 5.18 RAO Roll dengan S/L=0,3 pada Fr=0 136
Tabel 5.19 RAO Heave dengan S/L=0,4 pada Fr=0 138
Tabel 5.20 RAO Pitch dengan S/L=0,4 pada Fr=0 138
Tabel 5.21 RAO Roll dengan S/L=0,5 pada Fr=0 139
Tabel 5.22 RAO Heave dengan S/L=0,5 pada Fr=0 141
Tabel 5.23 RAO Pitch dengan S/L=0,5 pada Fr=0 141
Tabel 5.24 RAO Roll dengan S/L=0,5 pada Fr=0 143
Tabel 5.25 RAO Heave dengan S/L=0,2 pada Fr=0,21 144
Tabel 5.26 RAO Pitch dengan S/L=0,2 pada Fr=0,21 145
Tabel 5.27 RAO Roll dengan S/L=0,2 pada Fr=0,21 145
Tabel 5.28 RAO Heave dengan S/L=0,3 pada Fr=0,21 147
Tabel 5.29 RAO Pitch dengan S/L=0,3 pada Fr=0,21 148
Tabel 5.30 RAO Roll dengan S/L=0,3 pada Fr=0,21 148
Tabel 5.31 RAO Heave dengan S/L=0,4 pada Fr=0,21 150
Tabel 5.32 RAO Pitch dengan S/L=0,4 pada Fr=0,21 151
Tabel 5.33 RAO Roll dengan S/L=0,4 pada Fr=0,21 151
Tabel 5.34 RAO Heave dengan S/L=0,5 pada Fr=0,21 153
Tabel 5.35 RAO Pitch dengan S/L=0,5 pada Fr=0,21 154
xv
Tabel 5.37 RMS pada Fr = 0 (Pengujian) 157
Tabel 5.38 RMS pada Fr = 0 (Pengujian) 157
Tabel 5.39 RMS dengan S/L=0,2 pada Fr = 0 158
Tabel 5.40 RMS dengan S/L=0,3 pada Fr = 0 158
Tabel 5.41 RMS dengan S/L=0,4 pada Fr = 0 158
Tabel 5.42 RMS dengan S/L=0,5 pada Fr = 0 158
Tabel 5.43 RMS dengan S/L=0,2 pada Fr = 0,21 160
Tabel 5.44 RMS dengan S/L=0,3 pada Fr = 0,21 161
Tabel 5.45 RMS dengan S/L=0,4 pada Fr = 0,21 161
Tabel 5.46 RMS dengan S/L=0,5pada Fr = 0,21 162
Tabel 6.1 Perbandingan Koefisien Hambatan Total pada S/L = 0,2 169 Tabel 6.2 Perbandingan Koefisien Hambatan Total pada S/L = 0,3 169 Tabel 6.3 Perbandingan Koefisien Hambatan Total pada S/L = 0,4 170 Tabel 6.4 Perbandingan Koefisien Hambatan Total pada S/L = 0,5 170 Tabel 6.5 Perbandingan Koefisien Hambatan Viskos pada S/L = 0,2 173 Tabel 6.6 Perbandingan Koefisien Hambatan Viskos pada S/L = 0,3 173 Tabel 6.7 Perbandingan Koefisien Hambatan Viskos pada S/L = 0,4 174 Tabel 6.8 Perbandingan Koefisien Hambatan Viskos pada S/L = 0,5 174 Tabel 6.9 Perbandingan Koefisien Hambatan Gelombang pada S/L = 0,2 177 Tabel 6.10 Perbandingan Koefisien Hambatan Gelombang pada S/L = 0,3 177 Tabel 6.11 Perbandingan Koefisien Hambatan Gelombang pada S/L = 0,4 178 Tabel 6.12 Perbandingan Koefisien Hambatan Gelombang pada S/L = 0,5 178 Tabel 6.13 Nilai interfrensi viskos untuk trimaran (Eksperimen) 180
Tabel 6.14 Nilai interfrensi viskos untuk trimaran (CFD) 181
Tabel 6.15 Nilai interfrensi gelombang untuk trimaran (Eksperimen) 182
Tabel 6.16 Nilai interfrensi gelombang untuk trimaran (CFD) 183
Tabel 6.17 Perbandingan RAO Trimaran S/L = 0,2, sudut heading 00 186 Tabel 6.18 Perbandingan RAO Trimaran S/L = 0,2, sudut heading 1800
188 Tabel 6.19 Perbandingan RAO Trimaran S/L = 0,3, sudut heading 00
189 Tabel 6.20 Perbandingan RAO Trimaran S/L = 0,3, sudut heading 1800
191 Tabel 6.21 Perbandingan RAO Trimaran S/L = 0,4, sudut heading 00
xvi
Tabel 6.22 Perbandingan RAO Trimaran S/L = 0,4, sudut heading 1800
194 Tabel 6.23 Perbandingan RAO Trimaran S/L = 0,5, sudut heading 00
195 Tabel 6.24 Perbandingan RAO Trimaran S/L = 0,5, sudut heading 1800
197
Tabel 6.25 Koefisien hambatan total 199
Table 6.26 RAO Tirmaran dengan gelombang 0 derajat 200
Table 6.27 RAO Tirmaran dengan gelombang 180 derajat 200
Tabel 6.28 Korelasi CT dan RMS Heave 201
Tabel 6.29 Korelasi CT dan RMS Pitch 202
Tabel 6.30 Korelasi CT dan RMS Roll 203
Tabel 6.31 Optimasi Trimaran 204
xvii
DAFTAR GAMBAR
Gambar 1.1 Kapal penumpang monohull, (wikipedia, 2010) 2 Gambar 1.2. Kapal penumpang katamaran (high speed catamaran),
(wikipedia, 2009) 3
Gambar 1.3 Perahu tradisional trimaran, (wikipedia, 2008) 4 Gambar 1.4. Kapal perang trimaran (fregat), (wikipedia, 2010) 4 Gambar 1.5. Kapal penumpang trimaran, (wikipedia, 2010) 5 Gambar 1.6. Advance marine vehicle, (Papanikolaou dkk,2005) 6
Gambar 1.7. Peta Kepulauan Maluku 7
Gambar 1.8 Pelayaran (a) Jarak dekat, (b) Jarak jauh 7 Gambar 2.1. Desain spiral proses perancangan kapal (Evans, 1957) 15 Gambar 2.2. Desain spiral proses perancangan kapal, (Pedatzur, 2004) 16 Gambar.2.3. Diagram komponen hambatan kapal, (Couser dkk, 1997). 20 Gambar 2.4. Diagram komponen hambatan kapai, (Molland, 2008). 21
Gambar 2.5 Model gaya pada elemen CFD 31
Gambar 2.6. Model aliran: (a) volume kontrol (control volume), (b) elemen kecil takberhingga (infinitesimal fluid element).
32 Gambar. 2.7 Analog respons kapal terhadap pengaruh dari luar 35
Gambar. 2.8 Derajat kebebasan pada kapal 36
Gambar 2.9 Response Amplitude Operators (Bhattacharyya, 1978) 42
Gambar 3.1 Diagram alur penelitian 62
Gambar 3.2 Alat ukur stain gage satu sumbu. 66
Gambar 3.3. Sketsa towing tank 66
Gambar 3.4 Towing tank 67
Gambar 3.5 Wave Maker 68
Gambar 3.6 Sketsa wave maker 69
Gambar 3.7 arah gelombang 00
69 Gambar 3.8 arah gelombang 1800
70
xviii
Gambar 3.10 Body Plan Kapal Trimaran (a) Mainhull (b) Sidehull 71
Gambar 3.11 Konfigurasi trimaran model S/L=0.2 71
Gambar 3.12 Konfigurasi trimaran model S/L=0.3 72
Gambar 3.13 Konfigurasi trimaran model S/L=0.4 72
Gambar 3.14 Konfigurasi trimaran model S/L=0.5 72
Gambar 3.15 Diagran komputasi pada program ANSYS CFX 75 Gambar 3.16 Diagran komputasi pada program ANSYS AQWA 77
Gambar 4.1. Koefisien hambatan total kapal trimaran dengan variasi
jarak antar lambung 82
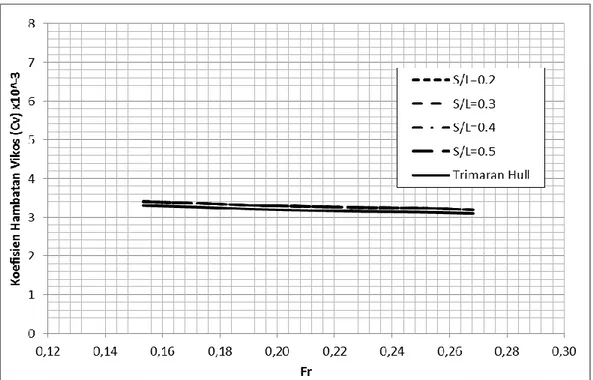
Gambar 4.2 Koefisien hambatan viskos kapal trimaran dengan variasi
jarak antar lambung 82
Gambar 4.3 Koefisien komponen hambatan trimaran, S/L=0.2
(Pengujian) 83
Gambar 4.4 Koefisien komponen hambatan trimaran, S/L=0.3
(Pengujian) 84
Gambar 4.5. Koefisien komponen hambatan trimaran, S/L=0.4
(Pengujian) 84
Gambar 4.6. Koefisien komponen hambatan trimaran, S/L=0.5
(Pengujian) 85
Gambar 4.7. Konvergensi proses iterasi pada CFD 87
Gambar 4.8. Initial computational domain pada CFD 88
Gambar 4.9. Meshing hull pada CFD 88
Gambar 4.10. Grid independence pada CFD. 89
Gambar 4.11. Koefisien hambatan total kapal trimaran dengan variasi
jarak antar lambung 92
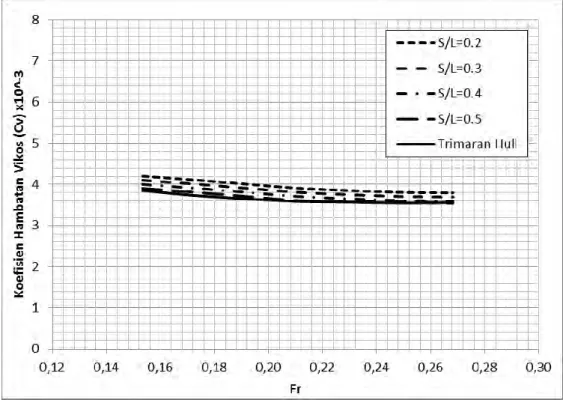
Gambar 4.12. Koefisien hambatan viskos kapal trimaran dengan variasi
jarak antar lambung 92
Gambar 4.13. Koefisien komponen hambatan trimaran, S/L=0,2 (CFD) 93 Gambar 4.14. Interferensi viskos Trimaran S/L = 0,2 94 Gambar 4.15. Interferensi gelombang Trimaran S/L = 0,2 94 Gambar 4.16. Koefisien komponen hambatan trimaran, S/L=0,3 (CFD) 95
xix
Gambar 4.17. Interferensi viskos Trimaran S/L = 0,3 96 Gambar 4.18. Interferensi gelombang Trimaran S/L = 0,3 96 Gambar 4.19. Koefisien komponen hambatan trimaran, S/L=0,4 (CFD) 98 Gambar 4.20 Interferensi viskos Trimaran S/L = 0,4 98 Gambar 4.21 Interferensi gelombang Trimaran S/L = 0,4 99 Gambar 4.22 Koefisien komponen hambatan trimaran, S/L=0,4 (CFD) 100 Gambar 4.23 Interferensi viskos Trimaran S/L = 0,4 100 Gambar 4.24 Interferensi gelombang Trimaran S/L = 0,4 101 Gambar 4.25 Konfigurasi posisi pengukuran kecepatan aliran dan
tekanan pada lambung 102
Gambar 4.26 Tekanan di antara lambung (Inner) dan di luar lambung
(Outer) pada rasio jarak lambung S/L=0.2. 105
Gambar 4.27 Tekanan di antara lambung (Inner) dan di luar lambung
(Outer) pada rasio jarak lambung S/L=0.3. 109
Gambar 4.28. Tekanan di antara lambung (Inner) dan di luar lambung
(Outer) pada rasio jarak lambung S/L=0.4 111
Gambar 4.29. Tekanan di antara lambung (Inner) dan di luar lambung
(Outer) pada rasio jarak lambung S/L=0.5 115
Gambar 5.1 RAO pada S/L=0,2 (Pengujian) 117
Gambar 5.2 RAO pada S/L=0.3 (Pengujian) 118
Gambar 5.3 RAO pada S/L=0.4 (Pengujian) 118
Gambar 5.4 RAO pada S/L=0.5 (Pengujian) 119
Gambar 5.5 RAO S/L=0,2 pada Fr=0,21 122
Gambar 5.6 RAO S/L=0,3 pada Fr=0,21 122
Gambar 5.7 RAO S/L=0,4 pada Fr=0,21 123
Gambar 5.8 RAO S/L=0,5 pada Fr=0,21 123
Gambar 5.9 Model trimaran pada Design Modeller 124
Gambar 5.10 Slice pada sarat 125
Gambar 5.11 Penentuan titik gravitasi dan Kedalam air yang
dikehendaki 126
xx
Gambar 5.13 set-up Model 128
Gambar 5.14 RAO Heave pada S/L=0,2 dengan Fr = 0 131 Gambar 5.15 RAO Pitch pada S/L=0,2 dengan Fr = 0 131
Gambar 5.16 RAO Roll pada S/L=0,2 dengan Fr = 0 132
Gambar 5.17 RAO Heave pada S/L=0,3 dengan Fr = 0 134 Gambar 5.18 RAO Pitch pada S/L=0,3 dengan Fr = 0 135
Gambar 5.19 RAO Roll pada S/L=0,3 dengan Fr = 0 135
Gambar 5.20 RAO Heave pada S/L=0,4 dengan Fr = 0 137 Gambar 5.21 RAO Pitch pada S/L=0,4 dengan Fr = 0 138
Gambar 5.22 RAO Roll pada S/L=0,4 dengan Fr = 0 138
Gambar 5.23 RAO Heave pada S/L=0,5 dengan Fr = 0 140 Gambar 5.24 RAO Pitch pada S/L=0,5 dengan Fr = 0 141
Gambar 5.25 RAO Roll pada S/L=0,5 dengan Fr = 0 141
Gambar 5.26 RAO Heave pada S/L=0,2 dengan Fr = 0,21 146 Gambar 5.27 RAO Pitch pada S/L=0,2 dengan Fr = 0,21 146 Gambar 5.28 RAO Roll pada S/L=0,2 dengan Fr = 0,21 147 Gambar 5.29 RAO Heave pada S/L=0,3 dengan Fr = 0,21 152 Gambar 5.30 RAO Pitch pada S/L=0,3 dengan Fr = 0,21 152 Gambar 5.31 RAO Roll pada S/L=0,3 dengan Fr = 0,21 152 Gambar 5.32 RAO Heave pada S/L=0,4 dengan Fr = 0,21 152 Gambar 5.33 RAO Pitch pada S/L=0,4 dengan Fr = 0,21 152 Gambar 5.34 RAO Roll pada S/L=0,4 dengan Fr = 0,21 153 Gambar 5.35 RAO Heave pada S/L=0,5 dengan Fr = 0,21 155 Gambar 5.36 RAO Pitch pada S/L=0,5 dengan Fr = 0,21 155 Gambar 5.37 RAO Roll pada S/L=0,5 dengan Fr = 0,21 156
Gambar 5.38 RMS Heave pada Fr = 0 159
Gambar 5.39 RMS Pitch pada Fr = 0 160
Gambar 5.40 RMS Roll pada Fr = 0 160
Gambar 5.41 RMS Heave pada Fr = 0,21 162
Gambar 5.42 RMS Pitch pada Fr = 0,21 163
xxi
Gambar 6.1 Perbandingan Koefisien Hambatan Total S/L = 0,2 167 Gambar 6.2 Perbandingan Koefisien Hambatan Total S/L = 0,3 167 Gambar 6.3 Perbandingan Koefisien Hambatan Total S/L = 0,4 168 Gambar 6.4 Perbandingan Koefisien Hambatan Total S/L = 0,5 168 Gambar 6.5 Perbandingan Koefisien Hambatan Viskos S/L = 0,2 171 Gambar 6.6 Perbandingan Koefisien Hambatan Viskos S/L = 0,3 171 Gambar 6.7 Perbandingan Koefisien Hambatan Viskos S/L = 0,4 172 Gambar 6.8 Perbandingan Koefisien Hambatan Viskos S/L = 0,5 172 Gambar 6.9 Perbandingan Koefisien Hambatan Gelombang S/L = 0,2 175 Gambar 6.10 Perbandingan Koefisien Hambatan Gelombang S/L = 0,3 175 Gambar 6.11 Perbandingan Koefisien Hambatan Gelombang S/L = 0,4 176 Gambar 6.12 Perbandingan Koefisien Hambatan Gelombang S/L = 0,5 176 Gambar 6.13 Interferensi hambatan viskos untuk jarak melintang (S/L)
(Eksperimen) 180
Gambar 6.14 Interferensi hambatan viskos untuk jarak melintang (S/L)
(CFD) 181
Gambar 6.15 Interferensi hambatan Gelombang untuk jarak melintang
(S/L) (Eksperimen) 182
Gambar 6.16 Interferensi hambatan gelombang untuk jarak melintang
(S/L) (CFD) 183
Gambar 6.17 Harga y+ 184
Gambar 6.18 Grafik Perbandingan RAO Heave S/L = 0,2 dengan arah
gelombang 00 187
Gambar 6.19 Grafik Perbandingan RAO Pitch S/L = 0,2 dengan arah
gelombang 00 187
Gambar 6.20
Grafik Perbandingan RAO Heave S/L = 0,2 dengan arah
gelombang 1800 188
Gambar 6.21 Grafik Perbandingan RAO Pitch S/L = 0,2 dengan arah
gelombang 1800 189
Gambar 6.22 Grafik Perbandingan RAO Heave S/L = 0,3 dengan arah
xxii
Gambar 6.23 Grafik Perbandingan RAO Pitch S/L = 0,3 dengan arah
gelombang 00 190
Gambar 6.24 Grafik Perbandingan RAO Heave S/L = 0,3 dengan arah
gelombang 1800 191
Gambar 6.25 Grafik Perbandingan RAO Pitch S/L = 0,3 dengan arah
gelombang 1800 192
Gambar 6.26 Grafik Perbandingan RAO Heave S/L = 0,4 dengan arah
gelombang 00 193
Gambar 6.27 Grafik Perbandingan RAO Pitch S/L = 0,4 dengan arah
gelombang 00 193
Gambar 6.28 Grafik Perbandingan RAO Heave S/L = 0,4 dengan arah
gelombang 1800 194
Gambar 6.29 Grafik Perbandingan RAO Pitch S/L = 0,4 dengan arah
gelombang 1800 195
Gambar 6.30 Grafik Perbandingan RAO Heave S/L = 0,5 dengan arah
gelombang 00 196
Gambar 6.31 Grafik Perbandingan RAO Pitch S/L = 0,5 dengan arah
gelombang 00 196
Gambar 6.32 Grafik Perbandingan RAO Heave S/L = 0,5 dengan arah
gelombang 1800 197
Gambar 6.33 Grafik Perbandingan RAO Pitch S/L = 0,5 dengan arah
gelombang 1800 198
Gambar 6.34 Koefisien hambatan total kapal trimaran dengan variasi
jarak antar lambung 199
Gambar 6.35 Korelasi CTdan RMS Heave 202
Gambar 6.36 Korelasi CT dan RMS Pitch 203
Gambar 6.37 Korelasi CT dan RMS Roll 204
Gambar 6.38 Optimasi Variasi Trimaran 205
xxiii
DAFTAR SIMBOL
L, LWL Panjang garis air b Lebar lambung demihull B Lebar lambung trimaran
Cb Koefisien blok
CF Koefisien hambatan gesek CR Koefisien hambatan sisa CT Koefisien hambatan total CV Koefisien hambatan viskos CW Koefisien hambatan gelombang CFD Computational of Fluid Dynamics
Fr Bilangan Froude
IF Faktor interferensi komponen hambatan ITTC International Towing Tank Conference k Form factor
LCB Longitudinal center of buoyancy
P Tekanan
T Sarat air
∇ Volume lambung (demihull) Δ Displasmen (berat lambung di air) RAO Response Aplitude Operator H (ω) Fungsi Respon
output signal gelombang
xxiv
1
BAB 1
PENDAHULUAN
1.1. Latar BelakangDalam 40 tahun terakhir telah terjadi peningkatan kebutuhan akan kapal-kapal penumpang dan kargo ditinjau dari aspek hambatan dan tenaga penggerak yang semakin efisien sehingga mampu mengurangi kebutuhan energi, terutama bahan bakar minyak (BBM) yang bersumber dari energi fosil. Selain itu, faktor dinamika gerak kapal (seakeeping) yang menggambarkan kemampuan dan kenyamanan kapal ketika beroperasi di laut tenang (calm water) dan perairan bergelombang (oblique seas) juga memperoleh perhatian yang sangat penting. Berbagai bentuk dan konfigurasi kapal kemudian dikembangkan dan meliputi bentuk-bentuk kapal lambung tunggal (monohull), kapal lambung ganda (twinhull, catamaran), dan kapal lambung banyak (multihull). Penelitian tentang berbagai bentuk badan kapal tersebut dilakukan di berbagai negara, antara lain dilaporkan di dalam Turner dan Taplin (1968) menjelaskan perhitungan tenaga penggerak kapal katamaran ukuran besar, Larsson dan Baba (1969) membahas pembagian komponen hambatan kapal, Pien (1976), Miyazawa (1979) dan Liu dan Wang (1979) menjelaskan penenentuan hambatan interferensi kapal katamaran, Insel dan Molland (1992) melakukan penelitian sistematis menggunakan model NPL dan series-64 dan mengusulkan formulasi matematis perhitungan hambatan kapal katamaran, Utama (1999) menjelaskan perhitungan hambatan kapal katamaran secara eksperimental dan numerik, dan Utama dkk (2008) membahas perhitungan hambatan kapal katamaran dan trimaran untuk aplikasi penumpang di perairan sungai secara eksperimental.
Ketiga moda kapal tersebut umumnya dibangun untuk aplikasi kapal penumpang (ferries), sarana olahraga (sporting craft) dan kapal riset oseanografi (oceanographic research vessels) (Utama, 2008). Dari ketiga jenis tipe kapal tersebut, masing-masing mempunyai kelebihan dan kekurangan yang perlu diperhatikan ketika kita akan mempergunakannya. Kapal-kapal berbadan tunggal (monohull) memang telah ada sejak dahulu dan telah banyak digunakan untuk
2
aplikasi kapal-kapal penumpang, pengangkut kontainer dan kargo cair, kapal perang, dan lain-lain. Bentuk lambung tunggal (monohull) antara lain dapat dilihat pada Gambar 1.1.
Kira-kira sejak 30 tahun terakhir, perkembangan dan permintaan terhadap tipe kapal-kapal (multihulls) semakin meningkat. Kapal-kapal jenis ini apabila dibandingkan dengan kapal-kapal berbadan tunggal (monohulls) mempunyai beberapa kelebihan antara lain tata letak akomodasi yang lebih menarik, adanya peningkatan stabilitas melintang dan dalam sejumlah kasus mampu mengurangi kapasitas tenaga penggerak kapal untuk mencapai kecepatan dinas tertentu. Penggunaan kapal katamaran pada umumnya adalah untuk kapal penumpang cepat dimana lambung yang ramping (slender) memungkinkan adanya pengurangan hambatan sebagai akibat dari berkurangnya luas permukaan basah badan kapal dan selanjutnya menghasilkan kapasitas motor induk (main engine) yang lebih kecil dan konsumsi BBM yang lebih efisien serta lebih ramah lingkungan.
Gambar 1.1. Kapal penumpang monohull, (wikipedia, 2010)
Secara ekonomis, data dan fakta ini menunjukkan bahwa biaya operasional kapal katamaran dapat menjadi lebih murah dibandingkan sebuah kapal berbadan tunggal yang setara. Keuntungan yang sama dipercaya dapat diaplikasikan pada pengoperasian kapal – kapal penumpang yang tidak membutuhkan kecepatan terlalu tinggi seperti untuk angkutan sungai dan kapal-kapal penyeberangan untuk
3
menggantikan peranan feri roro berbadan tunggal yang disinyalir bermasalah dengan persoalan stabilitas dan keselamatan (Utama dkk, 2009). Suatu hal yang membuat kapal katamaran menjadi populer dan sukses digunakan dalam moda transportasi adalah tersedianya area geladak (deck area) yang lebih luas, tingkat stabilitas yang lebih nyaman dan aman (Seif, 2004, dan Zouridakis, 2005). Contoh dari sebuah kapal katamaran diperlihatkan pada Gambar 1.2.
Kapal katamaran memiliki sarat air yang rendah sehingga kapal ini dapat dioperasikan pada perairan dangkal dan kemudian bentuk lambung yang langsing (slender) dapat memperkecil timbulnya sibakan air (wavewash) dibanding kapal lambung tunggal (monohull). Konsep kapal katamaran paling banyak dipilih dan mendapatkan perhatian karena sejumlah kelebihannya antara lain memiliki luasan geladak yang lebih besar dan stabilitas melintang yang lebih baik dibandingkan kapal berbadan tunggal (Insel dan Mollland, 1992). Sejumlah hasil penelitian memperlihatkan bahwa konfigurasi kapal katamaran dapat memperbaiki karakteristik hambatan kapal seperti yang dilakukan oleh Matsui dkk (1993), Molland dan Utama (1997), Couser dkk (1997), Couser dkk (1998), Molland dkk (2000), dsn Utama (2006). Keberadaan 2 lambung (demihull) yang saling berdekatan pada jarak tertentu telah menimbulkan apa yang disebut hambatan interaksi atau interferensi dimana efeknya dapat menguntungkan atau malahan merugikan kapal itu sendiri. Fenomena menarik lainnya adalah perilaku gerakan kapal akibat pengaruh gelombang yang lebih popular disebut seakeeping. Sejumlah hasil penelitian memperlihatkan bahwa konfigurasi kapal katamaran dapat memperbaiki kualitas seakeeping kapal (Wellicome dkk, 1998).
Gambar 1.2. kapal penumpang katamaran (high speed catamaran), (wikipedia, 2009)
4
Di samping kedua bentuk lambung kapal monohull dan katamaran, bentuk lambung kapal berbadan tiga (trimaran) juga mengalami perkembangan yang cukup pesat di seluruh dunia pada saat ini. Istilah trimaran dalam abad ke-20 diyakini berhubungan dengan kata ‘tri’ dan ‘(cata) maran’ dimana diketahui pertama kali dikembangkan oleh Victor Thechet, perintis dan perancang kapal-kapal berbadan banyak (multihulls) kelahiran Ukrainia. Namun demikian, kapal trimaran (tradisional) dipercaya pertama kali dibangun oleh suku bangsa Polynesia di Pasifik Selatan kira-kira 4.000 tahun yang lalu. Popularitas kapal katamaran dan trimaran, terutama sebagai kapal layar, berkembang pada tahun 1960an dan 1970an.
Contoh aplikasi kapal tradisional trimaran diperlihatkan pada Gambar 1.3. Selanjutnya, dalam konteks kapal modern aplikasi trimaran diawali pada kapal perang (lihat contoh Gambar 1.4) dengan pertimbangan kualitas stabilitas dan seakeeping yang lebih baik, dan belakangan berkembang untuk aplikasi kapal penumpang (lihat contoh Gambar 1.5).
Gambar 1.3. Perahu tradisional trimaran, (wikipedia, 2008)
5
Gambar 1.5. Kapal penumpang trimaran, (wikipedia, 2010)
Pada saat ini ketika pertumbuhan ekonomi meningkat dan didukung oleh program tol laut dan perwujudan Indonesia sebagai poros maritim dunia, maka kebutuhan akan kapal sangatlah besar bagi negara-negara kepulauan seperti halnya negara Indonesia yang merupakan salah satu negara kepulauan terbesar yang dikelilingi oleh beribu-ribu pulau yang terbentang di wilayah perairan Nusantara.
Papanikolaou dkk (2005) memberikan data perbandingan kebutuhan untuk masing-masing tipe kapal seperti disajikan pada Gambar 1.6. Terlihat dengan jelas tipe katamaran mendominasi kebutuhan akan kapal-kapal modern kira-kira 34%. Kebutuhan tipe kapal trimaran digologkan ke kelompok tidak dikenal (unknown) dan kebutuhannya relatif kecil (0.5%). Seiring dengan perkembangan jaman dan perbaikan sistem transportasi global maka kebutuhan akan kapal trimaran menunjukkan kecenderungan meningkat terutama untuk fungsi kapal perang dan kapal penumpang (Kurultay, 2003).
6
Gambar 1.6. Advance marine vehicle, (Papanikolaou dkk,2005)
Seperti halnya kapal katamarn, maka kapal trimaran juga memiliki karakteristik hambatan dan gerak kapal (seakeeping) yang sangat baik, sehingga selain efisien dalam konteks konsumsi bahan bakar, kapal trimaran juga memiliki tingkat kenyamanan yang tinggi.
Moda kapal trimaran sangat layak dioperasikan di perairan Indonesia, meliputi perairan tertutup (danau dan sungai), terbatas (selat, antar pulau yang berdekatan), dan terbuka (misalnya Laut Jawa dan Laut Arafura). Contoh aplikasi pada perairan terbatas dan terbuka adalah wilayah Kepulauan Maluku. Perairan Maluku memiliki dua zona laut yang berbeda karateristik yaitu laut terbatas yang masih dikatagorikan laut tenang karena tinggi gelombang masih di bawah 1 meter dan perairan laut terbuka dengan tinggi gelombang dapat mencapai ketinggian 3-5 meter (BMKG Maluku, 2014). disertai dengan kondisi cuaca yang sangat ekstrim dan cepat berubah sehingga menyebabkan ketidaknyamanan dan selanjutnya dapat mengancam keselamatan jiwa di laut.
Dengan jarak antara pulau yang bervariasi, dimana ada yang dekat dan ada pula yang sangat jauh jaraknya, sehingga untuk menjangkau satu pulau ke pulau lain dapat melewati perairan terbatas dan bisa juga melewati laut terbuka. Gambar 1.7 menggambarkan kondisi alur perairan Maluku serta letak geografis dan posisi dari pulau-pulau yang terbentang pada kepulauan Maluku. Selanjutnya, Gambar 1.8a menggambarkan contoh pelayaran jarak dekat dan Gambar 1.8b memperlihatkan contoh pelayaran jarak jauh. Kedua jarak pelayaran yang berbeda tersebut menggambarkan kondisi gelombang yang berbeda, dimana pada jarak
7
dekat tinggi gelombang rata-rata berkisar 0-1 m atau berada pada sea state 0-2 dan pada pelayaran jauh tinggi gelombang di atas 1 m dan bahwa dapat mencapai 3-4 m atau berada pada sea state 3 ke atas (Bhattacaryya, 1978 dan Rawson dan Tupper, 2001).
Gambar 1.7. Peta Kepulauan Maluku
Gambar 1.8 Pelayaran (a) Jarak dekat, (b) Jarak jauh
Besarnya permintaan akan kapal untuk memenuhi kebutuhan transportasi laut di Kepulauan Maluku (Provisi Maluku dan Maluku Utara), menuntut tersedianya kapal dari berbagai tipe dan bentuk dalam jumlah yang memadai. Kapal-kapal
8
tersebut dapat berupa kapal tipe displasemen dan semi-displasemen (planning). Menurut catatan dari Direktorat Jenderal Perhubungan Laut (2014), sebagian besar kapal yang beroperasi di Perairan Maluku mempunyai panjang (LBP) di bawah 60 meter. Kapal-kapal tersebut, sebagian besar, tidak dapat beroperasi secara maksimal pada kondisi cuaca yang tidak menguntungkan (severe weather) terutama pada bulan April sampai Juni dan bulan Oktober sampai Desember dimana tinggi gelombang mencapai 3-5 meter (BMKG Maluku 2014). Disertasi ini dimaksudkan untuk meneliti karakteristik moda kapal trimaran yang layak dioperasikan pada perairan terbatas dan terbuka seperti Perairan Maluku. Aspek yang diteliti adalah persoalan hambatan (resistance) dan dinamika kapal (seakeeping) dan dilaksanakan melalui kajian empiris, pengujian model di towing tank, dan pengembangan model numerik berbasis computational fluid dynamics (CFD).
1.2. Perumusan Masalah
Penggunaan moda kapal lambung banyak (katamaran dan trimaran) tumbuh pesat sejak 30 tahun terakhir terutama untuk aplikasi kapal penumpang (Murdijanto dkk, 2010). Kapal-kapal ini dibangun dan dikembangkan di berbagai negara sebagai kapal displasemen penuh dan kapal tipe semi-displasemen atau planning (mengalami gaya angkat ketika kecepatan dan angka Froude kapal meningkat).
Karakteristik kapal yang umumnya ditinjau adalah penentuan hambatan kapal dimana selanjutnya berguna untuk menentukan besarnya tenaga penggerak dan ukuran serta kapasitas mesin induk kapal. Selanjutnya diketahui bahwa moda katamaran dan trimaran memiliki fenomena dan karakteristik hambatan yang lebih kompleks dibandingkan dengan moda monohull, dalam hal ini adanya fenomena interferensi di antara lambung kapal katamaran dan trimaran.
Fenomena interferensi di antara lambung katamaran telah diformulasikan dengan sangat baik oleh Insel dan Molland (1992) dan berbagai penelitian memperkuat fenomena tersebut, antara lain dilaporkan oleh Sahoo dkk (2007), Utama dkk (2009), dan Jamaluddin (2012). Fenomena interferensi tersebut meliputi 2 hal yaitu interferensi hambatan viskos dan interferensi hambatan gelombang. Sementara itu, fenomena interferensi pada kapal trimaran belum
9
diformulasikan dengan sempurna disebabkan oleh banyaknya konfigurasi dari moda kapal trimaran tersebut. Sejumlah penelitian telah dilakukan dan antara lain dilaporkan oleh Doctors dkk (1995), Murdijanto dkk (2010, Utama dkk (2011), Sahoo (2013), Luhulima dkk (2016a), dan Luhulima dkk (2016b). Aspek lain yang tidak kalah pentingnya adalah tinjauan karakteristik seakeeping kapal. Sejumlah penelitian menjelaskan tentang kualitas seakeeping yang sangat baik untuk trimaran (Doctors dkk, 1995, Murdijanto dkk, 2010, dan Fernandez, 2012), dan Luhulima dkk (2016c).
1.2.1 Interferensi Lambung Trimaran
Aliran air di antara main-hull dan side-hull sebuah trimaran adalah tidak simetris dimana hal ini disebabkan akibat timbulnya interaksi atau interferensi aliran di antara lambung penyusun trimaran tersebut. Dalam hal ini, besar tekanan yang timbul di sekitar lambung adalah relatif tidak simetri terhadap garis tengah (centre line) masing-masing lambung. Penjelasan tentang hal tersebut adalah sebagai berikut:
(1) Usikan kecepatan aliran di sekitar lambung meningkat terutama di sisi tengah sebagai akibat dari efek venturi. Penambahan kecepatan menyebabkan peningkatan hambatan gesek (skin friction).
(2) Cross-flow dapat terjadi di bawah lambung dimana dapat menimbulkan komponen hambatan induksi (induced drag). Penelitian dari Miyazawa (1979) pada kapal katamaran memperlihatkan pengaruh yang kecil dari cross-flow dibandingkan dengan pengaruh usikan karena peningkatan kecepatan. (3) Karena ketinggian gelombang di belakang lambung kapal bagian dalam dan
luar adalah berbeda, maka aliran air di bagian belakang tersebut memperlihatkan arah ke dalam atau keluar. Hal ini berdampak pada terjadinya vortices dan spray di bagian belakang lambung dan selanjutnya berkontribusi pada peningkatan komponen hambatan kapal.
(4) Kecepatan aliran bertambah besar di sisi tengah di antara ketiga lambung sehingga dapat mengubah struktur lapisan batas (boundary layer).
10
(5) Gelombang yang ditimbulkan dari satu lambung terhadap lambung lainnya, dan demikian sebaliknya, berakibat pada perubahan luas bidang basah (wetted surface) dan selanjutnya meningkatkan hambatan gesek (skin friction) kapal.
1.2.2 Interferensi Gelombang di antara Lambung Trimaran
Tiga lambung kapal trimaran yang secara berdampingan melaju pada kecepatan tertentu akan menghasilkan pertemuan 2 moda sistem gelombang di antara ketiga lambung kapal dan selanjutnya mengakibatkan interaksi atau interferensi hambatan gelombang. Penjelasan tentang fenomena interferensi tersebut adalah:
(1) Karena adanya perbedaan tekanan di sekitar lambung kapal, maka gelombang (wave-making) pada lambung akan berubah. Dengan perkataan lain, formasi gelombang dari lambung dapat berbeda dari lambung yang terisolasi.
(2) Karena adanya interaksi gelombang yang ditimbulkan oleh ketiga lambung, maka gelombang melintang dari satu lambung selalu diperkuat oleh gelombang melintang dari lambung lainnya. Pencaran atau sibakan gelombang yang terjadi di daerah haluan (bow) dari lambung yang satu dapat ditiadakan oleh pencaran gelombang di belakang (stern) dari lambung lainnya atau oleh refleksi gelombang haluan dari lambung lainnya.
(3) Refleksi pencaran gelombang dari lambung lainnya tersebut di atas membuat fenomena interferensi dan interaksi menjadi kompleks dan rumit. (4) Gelombang haluan (bow) yang ditimbulkan oleh ketiga lambung bertemu di
garis tengah antara main-hull dengan masing-masing side-hull. Supeposisi dari kedua gelombang tersebut mengakibatkan terjadinya gelombang yang tidak stabil dan bahkan dapat menyebabkan gelombang pecah (wave breaking) di daerah buritan dan sibakan air (spray)di daerah haluan pada kecepatan tinggi.
(5) Aliran air ke arah dalam dan ke arah luar pada bagian belakang lambung (stern) dapat mengubah formasi dan dan konfigurasi gelombang di daerah buritan kapal.
11
1.2.3. Interferensi Aliran terhadap Karakteristik Seakeeping
Selain berpengaruh terhadap besarnya hambatan kapal, maka interferensi gelombang juga berdampak pada kualitas atau karakteristik seakeeping kapal. Semakin besar lebar dari sebuah kapal maka stabilitas melintang dan gerakan rolling kapal akan semakin baik (Rawson dan Tupper, 2001), dan demikian pula dengan konfigurasi kapal trimaran. Perubahan jarak melintang antara main-hull dengan kedua side-hull dapat memperbaiki stabilitas melintang dan juga gerakan rolling kapal. Namun demikian, perubahan jarak pisah (spacing) antara lambung dapat mengganggu karakteristik rolling kapal. Penelitian yang dilakukan oleh Kurultay (2003) dan Murdijanto dkk (2010) memperlihatkan adanya perbaikan kualitas gerakan rolling ketika jarak pisah antara lambung ditingkatkan.
Dari penjelasan tersebut terlihat dengan jelas bahwa pengaruh interferensi hambatan viskos dan gelombang sangat signifikan pada kapal trimaran. Interferensi hambatan viskos disebabkan oleh aliran air yang tidak simetri (asymmetric flow) di sekitar lambung kapal sehingga memberikan pengaruh pada formasi lapisan batas (boundary layer) dan longitudinal vortices. Sementara itu, interferensi hambatan gelombang diakibatkan oleh adanya interaksi dari gelombang yang ditimbulkan oleh ketiga lambung kapal trimaran. Hal yang sama juga berlaku pada perbaikan kualitas seakeeping kapal yang diakibatkan oleh jarak pisah antara lambung kapal dan interaksi gelombang di antara ketiga lambung.
1.3. Tujuan dan Manfaat Penelitian 1.3.1. Tujuan Penelitian
Tujuan umum dari penelitian ini adalah melakukan analisis dan evaluasi karakteristik hidrodinamika moda kapal trimaran ditinjau dari aspek-aspek hambatan dan seakeeping kapal. Tujuan detailnya adalah:
1. Melakukan tinjauan dari state of the art dari karakteristik hambatan dan seakeeping kapal trimaran yang menjadi fokus dari penelitian ini.
12
3. Mengembangkan pengetahuan tentang karakteristik seakeeping dari moda kapal trimaran pada kondisi perairan tenang (calm water condition) dan perairan bergelombang (oblique waves)
4. Melakukan analisis terhadap karateristik hambatan dan seakeeping kapal dengan melakukan pengujian/eksperimental model kapal untuk moda kapal trimaran dan divalidasi dengan analisis empiris-numerik menggunakan analisis computatational fluid dynamics (CFD).
5. Melakukan studi/analisis komparatif dengan sejumlah published data untuk mengetahui tingkat kebenaran dari metode yang digunakan.
1.3.2. Manfaat Penelitian
Adapun manfaat dari penelitian ini adalah untuk:
1. Memberikan masukan dan memperkuat data base bagi perancang kapal, operator kapal dan pemerintah dalam rangka memilih moda kapal yang tepat untuk kondisi perairan tenang dan bergelombang seperti perairan Kepulauan Maluku, terutama ditinjau dari aspek perhitungan hambatan dan karakteristik seakeeping kapal.
2. Mendapatkan metode estimasi hambatan dan karakteristik seakeeping kapal yang sebaik-baiknya sebagai kombinasi dari pelaksanaan uji model kapal dan penggunaan teknik empiris-numerik dan penggunaan software komersial di bidang desain kapal (antara lain Maxsurf).
1.4 Batasan Masalah
Penelitian disertasi ini dilakukan dengan batasan-batasan tertentu dikarenakan keterbatasan alat uji dan perangkat yang digunakan. Batasan yang digunakan dalam penulisan disertasi ini antara lain :
1. Menggunakan model kapal trimaran NPL-4a dengan variasi S/L = 0,2 ; 0,3 ; 0,4 ; 0,5
2. Kecepatan uji (Fr) = 0,15 ; 0,17 ; 0,19 ; 0,21 ; 0,23 ; 0,25 ; 0,27 3. Model dilakukan pengujian pada Seastate 4
4. Pengujian yang dilakukan pada Towing Tank adalah 00(following seas) dan 1800(head seas) dengan Heave dan Pitch tanpa memperhatikan Roll.
13
5. Perhitungan prediksi RAO (Response Amplitude Operators) dengan perhitungan numerik ANSYS AQWA meliputi Heave, Pitch dan Roll dengan sudut datang 00 (following seas), 450 (follow quartering Seas), 900 (beam seas), 1350 (head quartering seas) dan 1800 (head seas).
1.5 Orisinalitas dan Kontribusi Penelitian
Penulisan disertasi ini berdasarkan penelitian komprehensif terkait hambatan dan seakeeping pada kapal trimaran displasemen. Penelitian yang dilakukan penulis adalah karya orisinalitas yang belum pernah dilakukan oleh pihak manapun dengan beberapa kategori sebagai berikut :
- Penelitan terdahulu belum pernah meneliti 2 aspek Hambatan dan Seakeeping
secara Komprehensif. Pada penelitian ini membahas secara rinci korelasi Hambatan dan Seakeping
- Variasi yang digunakan jarak antar lambung (S/L) pada kapal Trimaran
14
15
BAB 2
TINJAUAN PUSTAKA
2.1 Umum
Desain awal dari sebuah kapal umumnya berlangsung melalui tiga tahap:
concept; preliminary; and contract design. Proses desain awal sering digambarkan oleh desain spiral seperti gambar 2.1 (Evans, 1957) yang menunjukkan bahwa tujuan dari desain adalah untuk memperoleh solusi terbaik dengan menyesuaikan dan menyeimbangkan parameter yang saling terkait sebagai fase.
Spiral Design adalah metodologi untuk mengembangkan desain kapal. Kapal adalah sistem yang kompleks dengan variabel yang sangat saling terkait, dan tidak mungkin untuk menghitung faktor-faktor tersebut secara bersamaan. Oleh sebab itu, spiral design menggambarkan proses perbaikan secara berulang untuk memperoleh desain yang efisien. Setiap iterasi perputaran biasa disebut fase. Fase atau siklus dalam setiap putaran digunakan untuk penyempurnaan teknis yang telah dicapai.
16
Kemudian Pedatzur (2004) melakukan modifikasi terhadap spiral desain kapal (lihat Gambar 2.2), maka terlihat dengan jelas bahwa aspek penting yang perlu diperhatikan adalah persoalan hambatan (resistance) dan dinamika gerak kapal (seakeeping). Persoalan hambatan kapal berkaitan dengan gaya yang dialami oleh kapal untuk mencapai kecepatan tertentu, dimana kemudian berkorelasi dengan besarnya tenaga penggerak kapal untuk mencapai kecepatan tertentu tersebut, misalnya kecepatan dinas 15 knots (Harvald, 1983). Sementara itu, seakeeping adalah persoalan dinamika gerak kapal sebagai akibat dari perlakuan gelombang terhadap sebuah kapal (Bhattacaryya, 1978) dimana kapal akan mengalami gerakan heave, pitch, dan roll.
Gambar 2.2. Desain spiral proses perancangan kapal (Pedatzur, 2004) Persoalan seakeeping memberikan dampak psikologis terhadap penumpang dan awak kapal (ABK). Besar dan kecepatan gerak kapal, terutama gerakan heave, pitch dan roll, menghasilkan dampak yang bertentangan terhadap penumpang dan ABK (Rawson dan Tupper, 2001). Kasus tersebut antara lain meliputi masalah mabuk laut (sea sickness) yang dapat mengurangi kemampuan kerja ABK untuk melaksanakan tugas-tugasnya di atas kapal dan menyebabkan ketegangan (stress) bagi penumpang. Karena itu, analisis seakeeping menjadi sangat penting bagi sebuah kapal penumpang.
17
Diketahui bahwa kapal displasmen monohull yang konvensional tidak ekonomis pada bilangan Froude sekitar 0,4, dimana umumnya terjadi hump hambatan akibat besarnya gelombang gravitasi pada permukaan air (Zouridakis,2005). Untuk memperkecil hambatan kapal monohull adalah suatu hal yang sulit dicapai karena dibutuhkan lebar kapal yang lebih kecil (atau rasio L/B>>) dengan displasmen tetap, dimana hal ini dapat menurunkan karakteristik stabilitas kapal monohull. Sehingga kapal trimaran menjadi solusi atas problem tersebut, dimana lambung kapal trimaran yang terpisah memiliki bentuk lambung yang tipis/ pipih dapat memperkecil gangguan permukaan air (disturbance on the free surface). Hal ini dengan sendirinya dapat memperkecil hambatan kapal. Disamping itu, dengan konfigurasi lambung yang terpisah akan memberikan momen inersia yang besar sehingga menghasilkan kemampuan stabilitas yang cukup baik dengan sudut akselerasi gerakan rolling yang kecil.
Secara umum, konsep konstruksi kapal trimaran terdiri atas tiga bagian
1. Lambung (hull) sebagai daya apung (bouyancy) dan akomodasi sistim propulsinya.
2. Struktur penghubung (cross structure) sebagai penguat bidang transversal (transversal strength)
3. Bangunan atas (super structure) yang terletak diatas struktur penghubung sebagai geladak.
Disain lambung trimaran merupakan hal yang sangat esensi dari bagian lainnya untuk memprediksi besarnya hambatan dan kebutuhan tenaga mesin pada kapal trimaran. Saat ini, belum banyak dijumpai desain kapal trimaran dengan konfigurasi dan dimensi yang bervariasi, dimana karakteristik disainnya sangat tergantung pada misi dan fungsi operasionalnya.
18
2.2 Teori Hambatan Kapal 2.2.1 Komponen Hambatan
Seperti diketahui, William Froude adalah orang pertama di dunia yang mengenalkan tata cara meprediksi hambatan kapal yang besar melalui kegiatan uji model kapal dalam skala yang lebih kecil dari kapal sesungguhnya. Atas jasanya, beliau kemudian dijuluki “the father of ship resistance”. Froude menjelaskan bahwa hambatan total kapal terdiri dari hambatan gesek dan hambatan sisa yang didominasi oleh hambatan gelombang. Froude menekankan bahwa hambatan gesek sebuah bentuk kapal adalah sama dengan hambatan gesek dari sebuah pelat datar dengan luas permukaan basah yang sama (1872). Secara matematis, formulasi Froude dinyatakan dalam bentuk koefisien sebagai:
(2.1)
Dimana CT adalah koefisien hambatan total, CF adalah koefisien hambatan gesek,
dan CR adalah koefisien hambatan sisa.
Metode analisa 2-dimensi tersebut dianggap tidak cukup menjelaskan kontribusi bentuk/kontur lambung kapal (3-dimensi) terhadap hambatan kekentalan, sehingga kemudian Hughes (1954) dan Granville (1956) memperkenalkan metode untuk digunakan dalam korelasi model ke kapal dimana total hambatan adalah penjumlahan dari 3 (tiga) komponen:
1. Hambatan gesek (skin friction) adalah gaya tangential stress yang timbul antara molekul air dan kulit badan kapal, yang kemudian dikenal sebagai hambatan bidang permukaan dengan area dan panjang yang sama dengan model.
2. Hambatan bentuk (form) adalah komponen hambatan yang dinyatakan dalam bilangan „1+k‟, dimana merupakan hambatan di luar batas item di atas dalam kasus lambung yang tercelup cukup dalam. Untuk lambung yang streamline pada aliran turbulen, dapat diekspresikan sebanding dengan hambatan gesek. 3. Hambatan free surface sebagai hambatan gelombang (CW) adalah hambatan
19
perbedaan tekanan pada permukaan (bidang) basah kapal yang selanjutnya menimbulkan wave pattern. Hambatan gelombang merupakan pengurangan hambatan total (CT) dari penjumlahan hambatan gesek (CF) dan hambatan
bentuk (CF0) dari model.
Secara matematis, pernyataan tersebut dirumuskan (dalam bentuk koefisien) sebagai:
( ) (2.2)
Dimana CW adalah koefisien hambatan gelombang, (1+k) adalah faktor
bentuk dan (1+k) CF adalah koefisien hambatan kekentalan dimana selanjutnya
dinyatakan sebagai (1+CV).
Harga CF dihitung dengan garis korelasi ITTC-1957 yang ditetapkan di
Madrid, Spanyol:
log Re 2
2 075 . 0 F C (2.3)Standar internasional dari ITTC (1978) dengan judul “1978 Performance Prediction Method for Simple Single Screw Ships” selanjutnya mengklasifikasikan hambatan kapal di air tenang (calm water), secara praktis, ke dalam 2 (dua) komponen hambatan utama yaitu hambatan kekentalan (viscous resistance) yang merupakan fungsi bilangan Reynolds (Re) dan hambatan gelombang (wave-making resistance) yang merupakan fungsi bilangan Froude (Fr), dimana korelasi kedua komponen hambatan tersebut diperlihatkan pada Persamaan (2.4):
20
Persamaan (2.2) ditambahkan dengan adanya faktor kekasaran permukaan dan hambatan angin, selanjutnya menghasilkan Persamaan (2.5):
( ) (2.5)
Dimana CF adalah roughness allowance dan CAA adalah hambatan udara
(diasumsikan nol bila tidak ada bangunan atas). ITTC merekomendasikan untuk mendapatkan nilai (1+k) melalui pengukuran pada kecepatan rendah dimana angka Froude (Fr) < 0.22 dan CW mendekati nol (tidak ada separasi aliran)
sehingga (1+k)=CT/CF. Dalam hal ini metode Prohaska (ITTC 2002, Bertram
2000) dapat digunakan seperti terlihat pada Persamaan (2.6)
nF
T k C aFr
C 1 (2.6)
Cara lain adalah menggunakan formulasi empiris yang dijelaskan di dalam Molland, Turnock, dan Hudson (2011).
Hambatan gelombang kemudian diketahui terdiri dari hambatan pola gelombang (wave pattern resistance) dan wave breaking dan spray resistance. Couser dkk (1997) menyempurnakan pembagian komponen hambatan kapal dengan memasukkan adanya induced drag dan hambatan akibat bentuk transom di belakang kapal (transom drag), lihat Gambar 2.3. Bila diamati dengan teliti maka tampak dengan jelas bahwa sisi atas menggambarkan penjelasan detail dari penurunan komponen hambatan menurut Froude (1872) dimana hambatan total terdiri dari hambatan gesek dan hambatan sisa. Sementara itu, sisi bawah memperlihatkan penjelasan dari Hughes (1954) dan Granville (1956) dimana hambatan total terdiri dari hambatan viskos dan hambatan gelombang.
21
Gambar 2.3. Diagram komponen hambatan kapal (Couser dkk, 1997).
Bentuk bagian belakang buritan kapal yang berbentuk kotak (transom) sering menambah hambatan tersendiri yang menambah komponen hambatan tekanan (pressure drag) dan sebagai hambatan induksi (induced drag) pada lambung trimaran (Couser dkk, 1997). Hambatan gelombang terjadi karena adanya gelombang gravitasi permukaan bebas dan tegangan viskos ditimbulkan oleh pengurangan tekanan di lambung bagian belakang (stern) kapal akibat adanya lapisan batas (boundary layer). Sedangkan wave breaking dan spray dapat memberikan kontribusi signifikan terhadap total hambatan pada kecepatan tinggi. Selanjutnya, Molland (2008) mengelompokan komponen hambatan ini ke dalam dua kelompok yaitu hambatan viskos (viscous resistance) dan hambatan gelombang (wave resistance) dan diperlihatkan pada Gambar 2.4.
22
Gambar.2.4. Diagram komponen hambatan kapal (Molland, 2008).
Standar internasional dari ITTC meng-klasifikasikan hambatan kapal di air tenang (calm water), secara praktis dibagi dalam 2 (dua) komponen hambatan utama yaitu hambatan viskos (viscous resistance) yang terkait dengan bilangan Reynolds dan hambatan gelombang (wave-making resistance) yang tergantung pada bilangan Froude, dimana korelasi kedua komponen hambatan tersebut diperlihatkan pada Persamaan 2.7.
(2.7)
2.2.2 Hambatan Gesek
Hambatan gesek adalah komponen hambatan yang diperoleh dengan cara mengintegralkan tegangan tangensial ke seluruh permukaan basah kapal menurut arah gerakan kapal (Harvald, 1983). Bagi suatu benda yang bergerak di dalam fluida, adanya viskositas akan menimbulkan gesekan. Penting tidaknya gesekan dalam situasi fisik ini tergantung pada jenis fluida dan konfigurasi fisik atau pola alirannya. Daerah fluida yang dekat dengan benda padat didefinisikan sebagai lapisan batas (boundary layer). Pada daerah ini gradien melintang kecepatannya sangat besar dibandingkan dengan variasi longitudinalnya, dan tegangan gesernya mempunyai makna yang penting. Koefisien hambatan gesek CF biasanya
23
diperoleh melalui percobaan di tangki uji (towing tank), sehingga diperlukan suatu cara yang seragam untuk menghitung gesekan permukaan dan untuk mengembangkan data yang diperoleh dari model ke ukuran kapal yang sebenarnya (prototype). Besar hambatan gesek pada dasarnya tergantung pada luas permukaan basah lambung kapal, tingkat kekasaran permukaan dan bilangan Reynolds, dimana bilangan Reynolds dinyatakan dengan Persamaan 2.8:
(2.8) Aliran fluida bisa digolongkan sebagai aliran viscous yang terbentuk boundary layer jika efek viskositasnya tidak diabaikan. Dan jika efek viskositasnya diabaikan maka aliran fluida tersebut merupakan aliran non viscous yang tidak terbentuk boundary layer. Fluida yang kontak langsung dengan suatu batasan pada aliran viscous akan mempunyai kecepatan sama dengan batasan padat itu sendiri atau tidak terjadi slip pada batasan padat tersebut. Sheer stress pada aliran viscous laminar dipengaruhi secara langsung oleh viskositas fluida dan gradient kecepatan yang ada dalam aliran fluida tersebut. Surface shear stress (τw) dapat dinyatakan dengan Persamaan 2.9 (Molland dkk, 2011):
(2.9)
dimana:
μ = viskositas absolute fluida du/dy= gradient kecepatan.
2.2.3 Hambatan Sisa
Bagian terbesar dari hambatan sisa adalah komponen hambatan gelombang (Harvald, 1983). Hambatan lainnya adalah hambatan tekanan dan hambatan gesek tambahan sebagai akibat bentuk benda yang tiga dimensi. Dari kegiatan praktis di laboratorium, hambatan sisa adalah kuantitas yang merupakan hasil pengurangan dari koefisien hambatan total dengan koefisien hambatan gesek.