1
PERENCANAAN LINTASAN MENGGUNAKAN DUBINS GEOMETRY PADA
PESAWAT UDARA NIR AWAK ( PUNA )
Nama Mahasiswa
: Norma Kumala Dewi
NRP
: 1206 100 006
Jurusan
: Matematika FMIPA-ITS
Dosen Pembimbing
: Subchan, Ph.D
Abstrak
Masalah utama dalam penerbangan pesawat udara nir awak (PUNA) atau yang dikenal dengan
Unmanned Aerial Vehicle
(UAV) adalah navigasi, control, dan panduan. PUNA membutuhkan panduan
yang mampu mengarahkan pergerakan pesawat untuk sampai pada tujuan. Sehingga dibutuhkan
perencanaan yang tepat untuk memodelkan lintasan agar pesawat dapat dikendalikan sesuai tujuan dan
dapat melewati lintasan yang optimal. Dalam hal ini perencanaan lintasan dikenal dengan
path planning
.
Dalam tugas akhir ini dibahas algoritma model lintasan optimal dan implementasinya dalam
sistem perangkat lunak MATLAB 7.6 dengan menggunakan metode geometri
Dubins
(
Dubins
Geometry
)
.
Kata kunci : Pesawat udara nir awak (PUNA), Lintasan Dubins Geometry, Perencanaan lintasan (path
planning).
1.
PENDAHULUAN
Pengawasan udara merupakan salah satu
penyelesaian yang efektif untuk menjaga dan
memonitor keadaan lingkungan secara geografis.
Satelit dan pesawat terbang berawak merupakan
peralatan pengawasan yang efektif namun sering
mengalami
kendala
operasional
terutama
infrastruktur
pendukung.
Unmanned
Aerial
Vehicle (UAV)
atau pesawat udara nir awak
(PUNA) bisa menjadi penyelesaian alternatif yang
memiliki kemampuan untuk menjalankan fungsi
yang sama dengan pesawat berawak dengan
tingkat keadaan operasional yang lebih kecil dan
untuk meminimalisir kecelakaan dan jatuhnya
korban jiwa. Kemampuan PUNA yang dapat
dikendalikan dari jarak jauh atau bahkan bisa di
program sendiri dengan lintasan tertentu akan
sangat memberikan keuntungan dengan biaya dan
waktu yang lebih efektif dan efisien [7].
Pesawat
udara
nir
awak
(PUNA)
membutuhkan sistem navigasi, panduan, dan
kendali yang mampu mengarahkan pesawat
bergerak sampai ke tujuan. Navigasi penerbangan
adalah proses mengarahkan posisi pesawat dari
satu titik ke titik yang lain dengan selamat dan
lancar untuk menghindari rintangan penerbangan.
Proses
Navigasi
penerbangan
merupakan
koordinasi
dari
perencanaan
(
planning
),
penginderaan
(
sensing
),
dan
pengendalian
(
control
) [9]. Permasalahan navigasi yang paling
sederhana adalah menemukan jalan (
path
) dari
posisi awal ke target dan melewatinya tanpa
terjadi tabrakan dan menghindari halangan
(
obstacle
) yang ada. Berdasarkan posisi atau
lokasi tersebut, panduan menghasilkan trayektori
yang harus di ikuti. Sedangkan kendali terdiri dari
actuator sehingga PUNA dapat mengikuti lintasan
yang diinginkan.
Oleh karena itu, perencanaan lintasan
sangat penting dalam navigasi, panduan, dan
kontrol penerbangan. Dalam perencanaan lintasan
pesawat udara nir awak dapat digunakan berbagai
metode. Algoritma dari perencanaan lintasan akan
menghasilkan lintasan yang aman dan merupakan
lintasan dengan panjang minimal serta terlepas
dari segala kendala yang menghalangi. Sehingga
dapat dihasilkan waktu dan biaya yang optimal
pula dalam proses penerbangannya[1].
Model perencanaan lintasan pesawat
udara nir awak telah banyak diteliti dengan
berbagai metode salah satunya dengan metode
Geometri Dubins (
Dubins Geometry).
Seperti
yang telah dikembangkan oleh S. Subchan dkk [8]
yang merupakan aplikasi dari perencanaan
lintasan. Penelitian yang berbeda dilakukan oleh
Reeds dan Shepp, Boissonnat dkk dalam Shkel,
A.M., Lumelsky, V., [6] membuktikan metode
Dubins menunjukkan lintasan yang optimal.
Kelebihan metode Dubins Geometry karena dapat
menggeneralisasi kelengkungan garis dengan
interpolasi kekontinuannya. Dalam tugas akhir ini
dibahas tentang algoritma perencanaan lintasan
menggunakan metode
Dubins geometry
serta
implementasi dan simulasi dalam perangkat lunak
MATLAB
yang
akan
dapat
membantu
mengarahkan pergerakan PUNA. Sehingga dapat
memudahkan
kontrol
lintasan
penerbangan
pesawat udara nir awak dengan melalui lintasan
yang optimal dan feasible.
Tujuan
dari
penelitian
ini
adalah
membangun algoritma model lintasan PUNA dan
mengimplementasikan algoritma tersebut dalam
bentuk simulasi untuk diterapkan dalam sistem
PUNA dengan metode
Dubins Geometry
pada
perangkat lunak MATLAB.
Sedangkan manfaat yang diharapkan dari
hasil Tugas Akhir ini antara lain adalah Model
lintasan dengan
Dubins geometry
dapat digunakan
secara efektif untuk keamanan penerbangan
dalam sistem pengawasan udara, dan hasil
implementasi sistem dapat membantu pihak-pihak
terkait terutama pengambil keputusan untuk
menangani masalah lingkungan.
Dalam upaya mendapatkan suatu hasil yang
efektif, batasan permasalahan diberikan sebagai
berikut:
1.
Ketinggian UAV terbang dianggap konstan
dengan lintasan coplanar.
2.
Lintasan terbebas dari halangan
(obstacle)
3.
Simulasi dalam tugas akhir ini dikerjakan
dengan
menggunakan
perangkat
lunak
MATLAB 7.6
2.
DASAR TEORI
2.1 Pesawat Udara Nir Awak
Pesawat udara nir awak (PUNA) atau yang di
kenal dengan UAV ( Unmanned Aerial vehicles)
adalah pesawat udara yang dikendalikan tanpa
menggunakan awak manusia. Pesawat juga dapat
diperlengkapi dengan kamera, sensor, radar, dan
peralatan – peralatan lainnya dengan bobot yang
bergantung pada bobot pesawat.
PUNA dapat dimanfaatkan antara lain untuk
peran pengintaian dan pengumpulan data intelejen
termasuk untuk misi pertempuran, pemetaan, dan
observasi udara. Selain itu PUNA telah diterapkan
untuk kepentingan sipil, misalnya mitigasi
bencana, pencurian pasir laut, pemantauan
kebakaran hutan , dan lain-lain [2]. pesawat udara
nir awak (PUNA) bisa menjadi penyelesaian
alternatif yang memiliki kemampuan untuk
menjalankan fungsi yang sama dengan satelit dan
pesawat
berawak
dengan
tingkat
keadaan
operasional
yang
lebih
kecil
dan
untuk
meminimalisir kecelakaan dan jatuhnya korban
jiwa.
Kemampuan
PUNA
yang
dapat
dikendalikan dari jarak jauh atau bahkan bisa di
program sendiri dengan lintasan tertentu akan
sangat memberikan keuntungan dengan biaya dan
waktu yang lebih efektif dan efisien.
PUNA umumnya didesain dengan ukuran
yang tidak besar. Selain menghemat bahan bakar
penggerak
PUNA,
ini
juga
memudahkan
maneuver dari PUNA itu sendiri. Berdasarkan
ukurannya, PUNA dapat dikelompokkan kembali
menjadi PUNA secara umum, MAV (Micro
Aerial Vehicle), NAV (Nano Aerial Vehicle), dan
HLUAV (High Level Unmanned Aerial Vehicle).
PUNA dilengkapi dengan sistem navigasi dan
kendali terbang jarak jauh yang akurat, sistem
komunikasi
data-link
yang
mampu
terus
mengirimkan data status pesawat, target dan
informasi penginderaan dengan format gambar
digital secara real-time. PUNA memiliki bobot
yang ringan sehingga mudah bermanuver dan
praktis digunakan untuk berbagai tugas. Untuk
peran pengintaian PUNA dapat menjangkau jarak
50 km hingga 200km dan bisa bertahan hingga
lebih dari 15 jam.
2.2 Perencanaan Lintasan (Path Planning)
Path
planning
adalah
perencanaan
lintasan yang akan dilalui oleh robot, atau pesawat
dari
posisi
awal
menuju
target
untuk
mendapatkan lintasan yang optimal. Lintasan
optimal merupakan lintasan terpendek dan
merupakan lintasan yang terbebas dari halangan.
Path planning secara umum dapat ditulis sebagai
berikut [2]:
P
s(
x
s, y
s , s)
P
f(
x
f, y
f , f)
Keterangan:
P
s: Posisi awal pesawat
P
f: Posisi akhir Pesawat
x
s,
x
f: Posisi awal dan akhir
koordinat pada
3
y
s, y
f :Posisi awal dan akhir
koordinat pada
sumbu ordinat
s, f
: Sudut pesawat menghadap
Secara sederhana algoritma path planning
meliputi data input yang merupakan data dua
koordinat yaitu posisi awal dan posisi akhir dan
data output merupakan lintasan (path) Yang
mungkin di antara titik posisi awal dan posisi
akhir. Adapun skema umum perencanaan lintasan
sebagai berikut [9]:
2.3 Metode Dubins
Dubins adalah salah satu metode dalam
merancang model lintasan yang merupakan jalur
terpendek yang menghubungkan dua konfigurasi
dalam pesawat di bawah kendala yang terikat
pada kelengkungan lintasan. Garis merupakan
jarak terpendek antara dua titik dan sebuah busur
lingkaran
yang
merupakan
pergantian
kelengkungan terpendek. Dubins path planning
dibentuk dengan rangkaian dua busur lingkaran
dengan garis singgung atau dengan tiga garis
tangensial busur lingkaran.
Dalam membangun model lintasan dubins ada
dua pendekatan yaitu dengan geometri analitik
dan differential geometri. Pada pendekatan
geometri analitik lebih di fokuskan untuk bentuk
lintasan CLC, sedangkan differential geometri
menggunakan CCC [5].
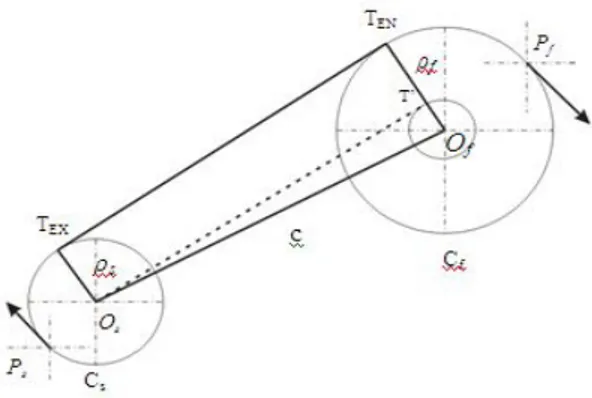
2.3.2 Lintasan Dubins Geometry
Dalam geometri analitik, lintasan Dubins
dihasilkan oleh gambar antara garis singgung dua
buah busur lingkaran. Secara umum garis
singgung menghubungkan antara busur eksternal
dan busur internal ( diagonal ). Kemungkinan
Lintasan
Dubins Geometry
yang terbentuk ada
empat macam lintasan yaitu LSL, LSR, RSR, dan
RSL dengan keterangan L adalah left (kiri) dan R
adalah Right (kanan). Salah satu bentuk lintasan
CLC yang berbentuk RSR dapat di gambarkan
sebagai berikut :
Penandaan gerakan awal dan akhir dapat
ditentukan dengan menggambarkan
masing-masing putaran kea rah kanan atau kiri. Dengan
memperhatikan masig-masing posisi, perputaran
positif atau negatif akan didefinisikan dengan
garis
lengkung
masing-masing
gerakan.
Parameter input dalam lintasan Dubins adalah
sebagai berikut [5]:
1.
Posisi awal pesawat
P
s(
x
s,y
s,)
2.
Posisi akhir pesawat
P
f(
x
f,y
f,)
3.
Penentuan jari-jari posisi awal
4.
Penentuan jari-jari posisi akhir
5.
Sudut hadap pesawat awal
6.
Sudut hadap pesawat awal
Adapun proses menghitung panjang lintasan
dubins geometry sebagai berikut:
1.
Menentukan parameter input yang diharapkan
yaitu posisi awal dan akhir pesawat.
2.
Menentukan koordinat titik pusat lingkaran
awal
O
s(
x
cs, y
cs) dan pusat lingkaran akhir
O
f(
x
cf, y
cf) dengan :
( , ) = ± ( ± 2), ± ( ± 2)
, = ± cos ± 2 , ± sin ± 2
Jarak anatara pusat lingkaran
O
sdan
O
fdihubungkan dengan garis yang disebut
dengan garis pusat
c
yang dapat di hitung
dengan geometri Euclidean.
3.
Menentukan posisi koordinat tangent entri
(
,
)
dan
tangent
exit
(
,
)
. Tangen exit adalah titik
Gambar 2.1 Skema umum path planning
keluar dari lintasan bujur lingkaran dan awal
dari lintasan garis. Sedangkan tangent entry
adalah titik dari akhir lintasan garis dan awal
dari busur lingkaran kedua yang akan
dibentuk. Sebelum menentukan koordinat
perlu dilakukan perhitungan sudut entry
dan sudut exit
.
4.
Dari di atas dapat dihitung panjang lintasan
Dubins sebagai berikut :
2.3.3 Eksistensi Lintasan Dubins Geometry
Sebelum menghitung panjang lintasan,
sangat penting untuk mengetahui lintasan yang
mungkin untuk dilalui oleh pesawat. Ini akan
menyimpan waktu dalam komputasi sistem.
Eksistensi lintasan antara dua karakter lintasan
Dubins ditentukan oleh adanya garis singgung
antara busur. Garis singgung eksternal dan
tangent exit menentukan keberadaan lintasan RSR
dan LSL, sedangkan keberadaan lintasan RSL dan
LSR ditentukan oleh Garis singgung internal.
Tangen eksternal hilang ketika lingkaran utama
sudah termasuk satu sama lain. Tangen internal
hilang ketika lingkaran utama berpotongan satu
sama lain. Kedua kondisi ditentukan oleh jarak
pusat c dan jari-jari-balik
dan
. Namun pusat
lingkaran utama ditetapkan oleh jari-jari dan
kelengkungan.
Oleh karena itu lintasan Dubins bergantug
pada sebuah fungsi dari jari – jari sebagai berikut:
Garis singgung luar :
Garis singgung dalam:
3.
METODOLOGI PENELITIAN
Metode yang digunakan pada tugas akhir
dalam menyelesaiakan permasalahan yang ada
adalah
1.
Studi literatur.
2.
Analisa model perencanaan lintasan.
3.
Perancangan algoritma perencanaan lintasan.
4.
Implementasi model perencanaan lintasan
pada perangkat lunak
4.1
Perancangan desain antarmuka sistem
4.2
Membuat program
4.3
Simulasi
4.4
evaluasi
5.
Penarikan kesimpulan dan penulisan laporan.
4.
PEMBAHASAN DAN IMPLEMENTASI
4.1 Analisis Model
4.1.1
Lintasan RSR (Right – Straight –
Right)
Lintasan RSR merupakan lintasan yang
terbentuk karena pesawat berbelok ke arah kanan
(se arah dengan jarum jam) dan membentuk busur
lingkaran yang selanjutnya disebut dengan
lingkaran pertama dan akan keluar melalui sebuah
titik pada busur lingkaran. Selanjutya akan
membentuk lintasan garis yang berujung pada
sebuah titik pada busur lingkaran kedua yang
terbentuk menuju posisi akhir pesawat dengan
sudut hadap pesawat yang di inginkan. Sehingga
lintasan yang terbentuk adalah lingkaran kanan–
garis – lingkaran kanan (RSR). Adapun proses
hitung lintasan RSR sebagai berikut:
1.
Menentukan posisi awal
P
sdan posisi akhir
pesawat
P
fterhadap sumbu x dan y pada
koordinat kartesius
(x,y)
, sudut hadap
pesawat
θ
, dan jari-jari mínimum lingkaran
ρ
yang akan dibentuk.
P
s=
[
x
s, y
s, θ
s,
] dan
P
f=
[
x
f, y
f, θ
f,
].
2.
Menentukan pusat lingkaran yang akan di
bentuk dengan batas jari-jari mínimum
dengan berbelok ke arah kanan posisi
pesawat (searah jarum jam) pada lingkaran
awal
dan
lingkaran
akhir
dengan rumus sebagai berikut:
3.
Menghitung jarak pusat lingkaran dengan
geometri Euclidean:
5
∥
∥
=
−
+
−
4.
Menganalisa kondisi eksistensi lintasan
Dubins yang berbentuk RSR dengan syarat
batas :
Jika |
−
| <
dan |
−
| <
Maka lintasan yang akan terbentuk tidak
feasible.akan tetapi, jika syarat tersebut tidak
terpenuhi maka lintasan feasible.
5.
Menentukan Sudut dari kemiringan garis
yang dibentuk oleh jarak pusat lingkaran
yang selanjutnya disebut
dapat dihitung
sebagai berikut :
=
Kemudian menentukan sudut yang dibentuk
oleh garis c dan selisih jari – jari lingkaran
∅
=
| || |
6.
Menentukan titik akhir dari busur lingkaran
awal yang selanjutnya disebut dengan
tangen
exit
sebelum membentuk lintasan garis dan
titik akhir dari lintasan garis yang terbentuk
sebelum membentuk lintasan busur lingkaran
akhir yang selanjutnya disebut
tangen entry
.
Namun sebelum menentukan titik maka
harus ditentukan terlebih dulu sudut entry
∅
dan sudut exit
∅
dari sudut hadap
pesawat ketika melalui titik tersebut.adapun
perhitungannya sebagai berikut:
∅
=
∅
+ +
dan
∅
=
∅
+ +
Sehingga dalam menentukan koordinat
tangen entry dan tangen exit adalah:
= ( + cos(∅ ) , + sin(∅ )) = ( + cos(∅ ) , + sin (∅ ))
7.
Selanjutnya menghitung panjang lintasan
garis atau jarak titik tangen entry dan tangen
exit dengan euclidean geometri
|
| = ( − ) −( − )8.
Kemudian menghitung panjang lintasan
busur lingkaran awal dan lingkaran akhir
= ∗
untuk panjang busur lingkaran awal:
,
=
∗
∗
+
2
− ∅
180°
Untuk panjang busur lingkaran akhir :
,
=
∗
∗
+
2
− ∅
180°
9.
.panjang lintasan total dapt dirumuskan
sebagai berikut :
= , + + ,
=
,
4.1.2
LIntasan LSL ( Left – Straight – Left )
Proses hitung lintasan LSL
hampir sama
dengan proses lintasan RSR, namun yang
membedakan adalah penentuan pusat lingkaran
yang dibentuk yaitu:
, = − − 2 , − ( − 2)
, = − − 2 , − ( − 2)
Dan perhitungan sudut tangen entry
∅
dan sudut
tangent exit
∅
yaitu:
∅
=
∅
−
+
dan
∅
=
∅
−
+
Selanjutnya perhitungan yang lain sama dengan
perhitungan lintasan RSR.
4.1.3
Lintasan RSL (Right – Straight – Left)
Proses hitung panjang lintasan RSL
sebagai berikut:
1.
Menentukan pusat lingkaran yang akan di
bentuk dengan batas jari – jari mínimum
lingkaran dengan berbelok ke arah kanan
posisi pesawat (searah jarum jam) dan arh
belok ke kiri pada lingkaran kedua dengan
rumus sebagai berikut:
, = − cos + 2 , − sin + 2
, = − cos − 2 , − sin − 2
2.
Menganalisa kondisi eksistensi lintasan
Dubins yang berbentuk RSL dengan syarat
batas:
Jika |
+
| >
Maka lintasan yang akan terbentuk tidak
feasible. Akan tetapi, jika syarat tersebut
tidak terpenuhi maka lintasan feasible.
Dengan adanya syarat batas tersebut maka
dipastikan jari-jari lingkaran awal dan akhir
tidak beririsan.
3.
Kemudian menentukan sudut yang dibentuk
oleh garis c dan selisih jari – jari lingkaran
∅
=
| | | |∅
=
∅ −
+
dan
∅
=
∅
+
+
Untuk perhitungan yang lain sama seperti yang
telah dijelaskan pada lintasan RSR.
4.1.4
LIntasan LSR (Left – Straight – Right)
Proses hitung panjang lintasan RSL
sebagai berikut:
1.
Menentukan pusat lingkaran yang akan di
bentuk dengan batas jari – jari mínimum
lingkaran dengan berbelok ke arah kanan
posisi pesawat (searah jarum jam) dan arh
belok ke kiri pada lingkaran kedua dengan
rumus sebagai berikut :
, = − − 2 , − ( − 2)
, = − + 2 , − ( + 2)
2.
Menganalisa kondisi eksistensi lintasan
Dubins yang berbentuk RSL dengan syarat
batas:
Jika |
+
| >
Maka lintasan yang akan terbentuk tidak
feasible.akan tetapi, jika syarat tersebut tidak
terpenuhi maka lintasan feasible. Dengan
adanya syarat batas tersebut maka dipastikan
jari – jari lingkaran awal dan akhir tidak
saling beririsan.
3.
Kemudian menentukan sudut yang dibentuk
oleh garis c dan selisih jari – jari lingkaran
∅
=
| | | |∅
=
∅ −
+
dan
∅
=
∅
+
+
Untuk perhitungan yang lain sama seperti
yang telah dijelaskan pada lintasan RSR.
4.2
Algoritma perencanaan lintasan
Langkah-langkah yang akan dilalui dalam
proses perencanaan lintasan mulai dari awal
hingga akhir tentang lintasan yang akan dilalui
oleh pesawat udara tanpa awak (PUNA)
digambarkan dalam sebuah algoritma. Sesuai
dengan metode yang digunakan yaitu Dubins
Geometry maka algoritma yang digunakan
sebagai berikut:
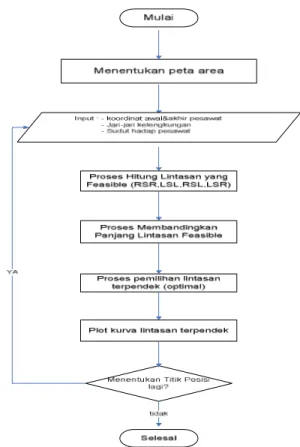
Adapun rincian penjelasan flowchart dalam
algoritma perencanaan lintasan Dubins geometry
sebagai berikut:
1.
Tahap pertama adalah menentukan peta area
yang akan dilintasi oleh pesawat.
2.
Inisialisasi input.
Data masukan dari algoritma perencanaan
lintasan ini adalah koordinat awal dan
koordinat
akhir
posisi
pesawat
yang
diinginkan terhadap sumbu absis dan ordinat,
jari-jari lingkaran awal dan akhir, sudut hadap
pesawat awal dan sudut pesawat akhir.
3.
Selanjutnya dilakukan analisa model lintasan
yang mungkin terbentuk untuk dilalui oleh
pesawat
(feasible path)
dari input yang di
inisialisasikan dengan kemugkinan lintasan
LSL, RSR, LSR, RSL dan dihitung panjang
lintasannya masing-masing. Panjang lintasan
di
hitung
berdasarkan
metode
Dubins
Geometry yaitu:
= , + + ,
= ∅ + + ∅ = ,
4.
Dari kemungkinan lintasan yang terbentuk,
maka selanjutnya dilakukan perbandingan
panjang lintasan yang mungkin dilewati
.
5.
Setelah
melakukan perbandingan,
maka
dilakukan pemilihan terhadap ke empat
lintasan dengan memilih lintasan yang
memiliki panjang lintasan terpendek atau
lintasan yang optimal.
6.
Hasil perhitungan panjang lintasan optimal
kemudian akan di plot kurva lintasan yang
akan dilalui pesawat
(flyable path)
7.
Jika ingin menentukan jalan yang akan
dilintasi lagi maka kembali ke langkah
pertama.
8.
Namun jika tidak ingin menentukan posisi
baru maka proses dapat di akhiri atau
berakhir.
4.4 Implementasi Perangkat Lunak
Setelah dilakukan analisa model rancangan
lintasan yang akan dibuat dan proses perhitungan
masing – masing bentuk lintasan dari kelompok
lintasan Dubins dan algoritma telah dibangun
maka dalam sub bab ini dibahas mengenai
implementasi sistem yang di bangun dalam
perangkat lunak dan bahasa pemrograaman
MATLAB yang meliputi:
4.4.1
Lingkungan implementasi sistem
Lingkungan
implementasi
model
rancangan lintasan dalam perangkat lunak yang di
bangun dalam tugas akhir ini meliputi perangkat
lunak dan perangkat keras yang selanjutnya akan
disajikan dalam tabel berikut:
Perangkat keras
Notebook Acer Aspire 4315
Intel Celeron Processor 560 (2,13 GHz) Memory 512 MB DDR2.
Monitor 14,1” Wide Crystal Brite Harddisk 120 Gb
Perangkat
lunak Microsoft Windows Xp MATLAB 7.6 (R2008a)
Dari lingkungan pengujian tersebut, dapat
dilihat bahwa uji coba hanya dapat dilakukan
pada sistem operasi dimana bahasa pemrograman
MATLAB telah terinstal di dalamnya, karena
perangkat lunak yang dihasilkan dalam Tugas
Akhir ini tidak dapat di-
package
(dipaketkan)
menjadi sebuah perangkat lunak portable yang
dapat di-
instal
di sebarang sistem operasi.
4.4.2
Simulasi dan Evaluasi
Dalam simulasi ini akan dilakukan beberapa
percobaan yang menggambarkan masing –
masing bentuk lintasan dubins yaitu lintasan RSR,
LSL, LSR, dan RSL.
Percobaan pertama
yaitu lintasan RSR dengan
menginputkan parameter sebagai berikut:
Posisi awal, dengan koordinat titik
x
= 4;
titik
y
= 0, Sudut hadap pesawat
= 0, dan
Jari-jari awal
= 1. Posisi akhir, dengan koordinat
titik
x
= 0, titik
y
= 0, sudut hadap pesawat
=
30, dan jari-jari akhir
= 1.
Maka dilakukan perhitungan panjang
lintasan dengan hasil Panjang lintasan RSR =
9.2621,
panjang lintasan LSL = 11.3088,
panajang lintasan RSL = 12.8811, dan panjang
lintasan LSR = 15.4680. Karena panjang lintasan
terpendek adalah lintasan RSR maka lintasan
yang akan ditempuh adalah lintasan RSR dengan
hasil plot kurva sebagai berikut:
Percobaan kedua
yaitu lintasan LSL dengan
menginputkan parameter sebagai berikut:
Posisi awal, dengan koordinat titik
x
= 3;
titik
y
= 3, Sudut hadap pesawat
= 60, dan
Jari-jari awal = 1. Posisi akhir, dengan koordinat titik
x
= 0, titik
y
= 1, sudut hadap pesawat
= 30,
dan jari-jari akhir = 1.
Maka setelah dilakukan perhitungan
panjang lintasan di dapatkan hasil sebagai berikut
:
Panjang lintasan RSR = 10.9212,
panjang lintasan
LSL = 8.8592, panajang lintasan RSL = 12.4390,
dan panjang lintasan LSR = 20.2170. Karena
panjang lintasan terpendek adalah lintasan LSL
maka lintasan yang akan ditempuh adalah lintasan
LSL dengan hasil plot kurva dapat digambarkan:
0 1 2 3 4 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 Sumbu x S u m b u y
Simulasi lintasan pesawat
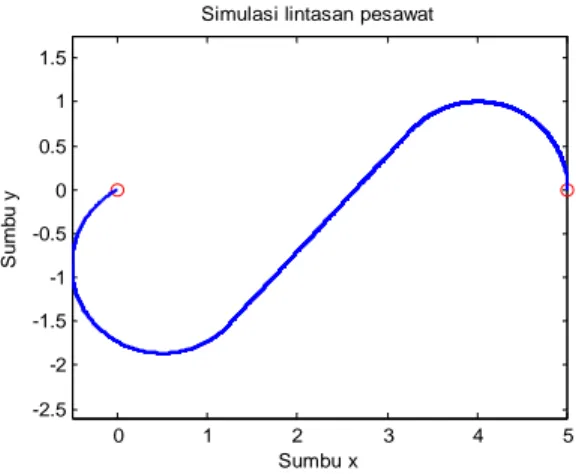
Percobaan ketiga
yaitu lintasan RSL dengan
menginputkan parameter sebagai berikut :
Posisi awal, dengan koordinat titik
x
= 0;
titik
y
= 0, Sudut hadap pesawat
= 0, dan
Jari-jari awal = 1. Posisi akhir, dengan koordinat titik
x
= 5, titik
y
= -3, sudut hadap pesawat
= 135,
dan jari-jari akhir = 1.
Maka setelah dilakukan perhitungan
panjang lintasan di dapatkan hasil sebagai berikut
:
Panjang lintasan RSR = 9.7787,
panjang lintasan
LSL = 15.0101, panajang lintasan RSL = 8.9560,
dan panjang lintasan LSR = 21.6305. Karena
panjang lintasan terpendek adalah lintasan RSL
maka lintasan yang akan ditempuh adalah lintasan
RSL dengan hasil plot kurva dapat digambarkan:
Percobaan keempat
yaitu lintasan LSR dengan
menginputkan parameter sebagai berikut :
Posisi awal, dengan koordinat titik
x
= 5;
titik
y
= 0, Sudut hadap pesawat
= 90, dan
Jari-jari awal = 1. Posisi akhir, dengan koordinat titik
x
= 0, titik
y
= 0, sudut hadap pesawat
= 30,
dan jari-jari akhir = 1.
Maka setelah dilakukan perhitungan
panjang lintasan di dapatkan hasil sebagai berikut
:
Panjang lintasan RSR =12.8981,
panjang lintasan
LSL = 9.8186, panajang lintasan RSL = 15.5074,
dan panjang lintasan LSR = 8.8499. Karena
panjang lintasan terpendek adalah lintasan LSR
maka lintasan yang akan ditempuh adalah lintasan
LSR dengan hasil plot kurva sebagai berikut:
Percobaan ke-lima
dengan posisi awal koordinat
titik
x
= 0, titik
y
= 0, Sudut hadap pesawat
=
45, dan Jari-jari awal = 1. Posisi akhir, dengan
koordinat titik
x
= -3, titik
y
= -3, sudut hadap
pesawat
= 45, dan jari-jari akhir = 1.
Maka setelah dilakukan perhitungan
panjang lintasan di dapatkan hasil Panjang
lintasan RSR =10.5258,
panjang lintasan LSL =
10.5258, panajang lintasan RSL = 12.2879, dan
panjang lintasan LSR = 21.3302. Karena panjang
lintasan terpendek adalah lintasan LSL dan
lintasan RSR maka lintasan yang mungkin akan
ditempuh adalah kedua lintasan tersebut namun
jika dalam program maka yang akan di plot
adalah yang fungsinya dipanggil pertama kali.
Karena pada program yang di inisialisasikan
pertama adalah fungsi lintasan RSR maka hasil
plot kurva sebagai berikut:
-1 0 1 2 3 1 1.5 2 2.5 3 3.5 4 4.5 Sumbu x S u m b u y
Simulasi lintasan pesawat
0 1 2 3 4 5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 Sumbu x S u m b u y
Simulasi lintasan pesawat
0 1 2 3 4 5 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 Sumbu x S u m b u y
Simulasi lintasan pesawat
Gambar 4.4 Lintasan LSL
Gambar 4.6 Lintasan RSL
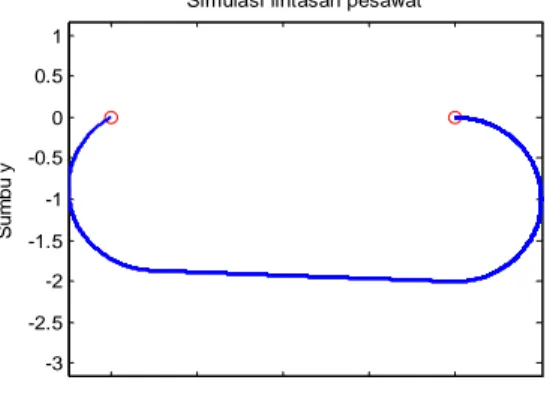
Percobaan ke-enam
.
Percobaan ini menjelaskan ketika lintasan
yang terbentuk adalah lintasan yang tidak feasible
akan tetapi flyable. Jadi, walaupun lintasan yang
terbentuk adalah lintasan dengan jarak terpendek
namun lintasan ini tidak layak untuk dilalui
pesawat karena tidak efisien dari segi waktu dan
buntuk lintasan.sebagai contoh yaitu:
Posisi awal, dengan koordinat titik
x
= 0;
titik
y
= 0, Sudut hadap pesawat
= 0, dan
Jari-jari awal = 1. Posisi akhir, dengan koordinat titik
x
= 0, titik
y
= 0, sudut hadap pesawat
= 270,
dan jari-jari akhir = 1.
Berdasarkan hasil perhitungan maka
panjang lintasan yang dihasilkan adalah panjang
lintasan RSR = 9.2682,
panjang lintasan LSL =
12.4098, panajang lintasan RSL = 6.8690, dan
panjang lintasan LSR = 19.4353. Karena panjang
lintasan terpendek yang dihasilkan adalah lintasan
RSL namun lintasan tersebut tidak feasible
dikarenakan tidak memenuhi syarat eksistensi
dubins maka lintasan tersebut flyable namun tidak
feasible. Adapun plot kurvanya sebagai berikut:
Adapun
implementasi
perencanaan
lintasan dalam sistem GUI dapat dibangun lebih
dari satu lintasan dengan proses hitung yang sama
seperti lintasan yang telah dijelaskan di atas.
Namun pada implementasi ini parameter input
dari posisi pesawat berdasarkan koordinat pixel
dari peta area yang digunakan. Sehingga panjang
lintasan yang dihasilkan memilki panjang dengan
satuan pixel. Sebagai contoh:
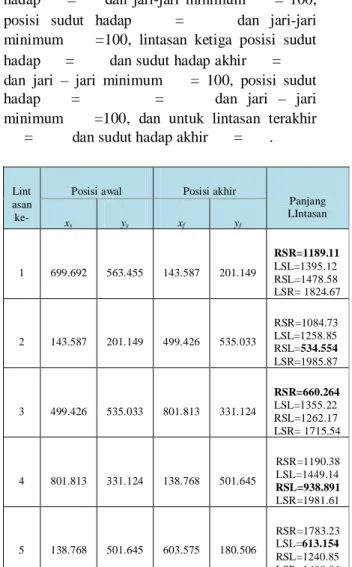
Simulasi pertama,
misalkan diinginkan pesawat
melintasi 5 buah lintasan pada enam buah titik
untuk lintasan pertama
=
, dan jari-jari
minimum
= 100, posisi sudut hadap kedua
=
. Untuk lintasan kedua dengan sudut
hadap
=
dan jari-jari minimum
= 100,
posisi sudut hadap
=
dan jari-jari
minimum
=100, lintasan ketiga posisi sudut
hadap
=
dan sudut hadap akhir
=
dan jari – jari minimum
= 100, posisi sudut
hadap
=
=
dan jari – jari
minimum
=100, dan untuk lintasan terakhir
=
dan sudut hadap akhir
=
.
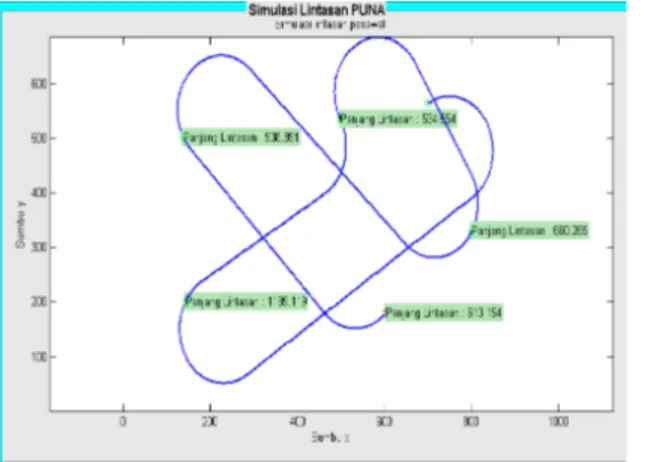
Berdasarkan hasil perhitungan panjang lintasan
pada tabel diatas lintasan yang dihasilkan
merupakan lintasan yang feasible dan flyable
Adapun hasil ploting lintasan dalam sistem
perhitungan dapat dilihat sebagai berikut :
-3 -2 -1 0 1 2 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 Sumbu x S u m b u y
Simulasi lintasan pesawat
0 0.5 1 1.5 2 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 Sumbu x S u m b u y
Simulasi lintasan pesawat
Lint asan
ke-
Posisi awal Posisi akhir
Panjang LIntasan xs ys xf yf 1 699.692 563.455 143.587 201.149 RSR=1189.11 LSL=1395.12 RSL=1478.58 LSR= 1824.67 2 143.587 201.149 499.426 535.033 RSR=1084.73 LSL=1258.85 RSL=534.554 LSR=1985.87 3 499.426 535.033 801.813 331.124 RSR=660.264 LSL=1355.22 RSL=1262.17 LSR= 1715.54 4 801.813 331.124 138.768 501.645 RSR=1190.38 LSL=1449.14 RSL=938.891 LSR=1981.61 5 138.768 501.645 603.575 180.506 RSR=1783.23 LSL=613.154 RSL=1240.85 LSR=1408.86