(1)BAB V
KESIMPULAN DAN SARAN
4.1
Kesimpulan
Dari penelitian yang telah dilakukan dapat disimpulkan bahwa :
1.
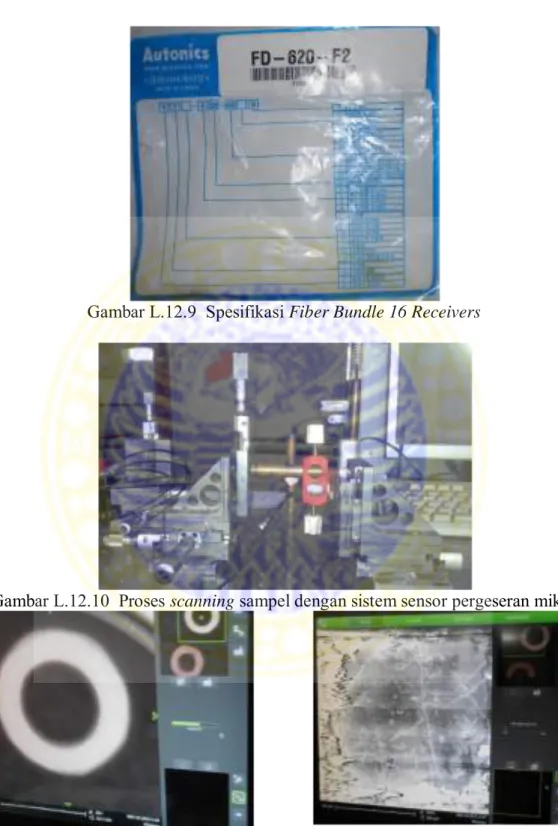
Untuk proses scanning, Fiber bundle 16 receivers diletakan sejauh 250 µm
untuk sampel Acrylic Denture, sejauh 200 µm untuk sampel Nano Hybrid
Compossite, sejauh 150 µm untuk sampel Varplast dan untuk sampel Nano
Filler diletakan sejauh 200 µm.
2.
Berdasarkan hasil scanning sampel secara analog untuk bahan gigi tiruan
tanpa lubang dengan gigi tiruan yang telah dilubangi sebesar 5 mm,
didapatkan nilai diameter lubang sebesar 0.5 mm untuk sampel Acrilic
Denture, Nano Hybrid Compossite, Varplast, dan 5.5 mm untuk sampel Nano
Filler dan besar nilai akurasi pengukuran untuk setiap sampel adalah 97.46%,
97.65%, 97.65%, 92.57% dengan jangka sorong sebagi pembanding. Maka
dapat diasumsikan bahwa sistem sensor pergeseran mikro dengan fiber bundle
16 receivers dapat digunakan untuk mengestimasi diameter lubang pada
sampel bahan gigi tiruan secara analog.
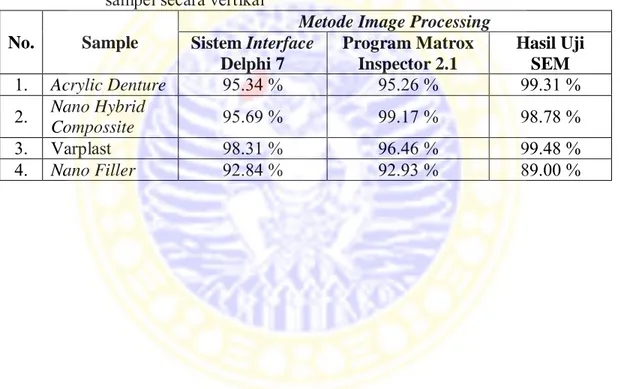
3.
Pemanfaatan sistem sensor pergeseran mikro dengan fiber bundle 16 receivers
menggunakan metode optical imaging untuk estimasi pengukuran diameter
hasil visualisasi sampel bahan gigi tiruan tidak sesuai dengan bentuk asli
psampel. Namun begitu, penelitian ini mampu mengukur lebar rongga sampel
bahan gigi tiruan dengan ketepatan pengukuran antara 89 %- 99.31%.
4.2
Saran
Dari proses penelitian Pemanfaatan Sistem Sensor Pergeseran Mikro untuk
estimasi diameter lubang pada bahan gigi tiruan berbasis optical imaging
disarankan sebagai berikut :
1.
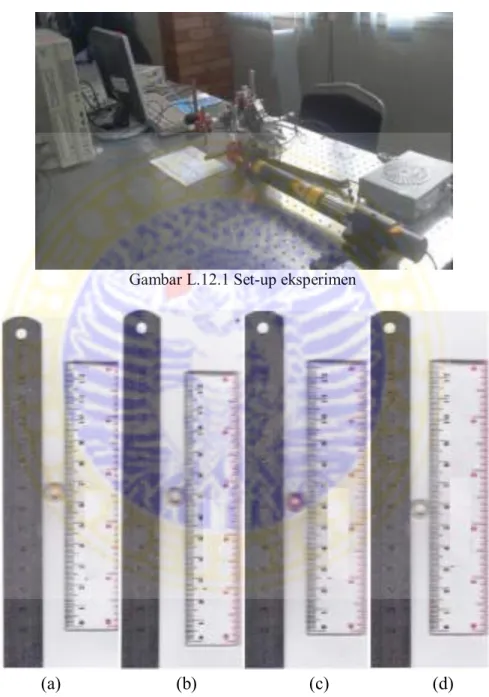
Set-up eksperimen harus dijaga konstan, tidak mengalami perubahan. Hal ini
dikarenakan pengukuran dilakukan dengan metode sensor pergeseran berorde
mikro yang sensitif.
2.
Nilai kekasaran dari objek yang digunakan sebagai sampel harus dijaga
serendah mungkin, agar berkas pantulan dari sumber cahaya dapat ditangkap
oleh serat penerima secara maksimal.
3.
Peletakan posisi serat optik bundel konsentris diatur tegak lurus terhadap
sampel sebagai reflektor agar berkas pantulan dari sumber cahaya dapat
ditangkap oleh serat penerima secara maksimal.
4.
Pengambilan nilai pergeseran pada proses scanning dilakukan dengan orde
sekecil mungkin, untuk memperhalus hasil rekonstruksi pada metode optical
5.
Sebagai pengembangan peneletian selanjutnya, perlu diberikan variasi lubang
pada masing-masing sampel bahan gigi tiruan.
DAFTAR PUSTAKA
Aini, N. F., 2012. Pengukuran Glukosa dalam Destilasi Menggunakan Fiber Coupler.
Skripsi S-1, Prodi S1 Fisika, Departemen Fisika, Fakultas Sains dan
Teknologi Universitas Airlangga. Surabaya.
Apsari R., 1998. Penentuan Koefisisen Difusi Larutan Dengan Teknik Interferometri
Holografi, Tesis, Program Pasca Sarjana, Universitas Gadjah Mada,
Yogyakarta.
Apsari R., da Yhuwana, Y.G.Y., 2007. Analisis Perubahan Warna Gigi Berdasarkan
Distribusi Intensitas Pola Difraksi Dari Output Sensor CCD Garis
Terkomputerisasi. Laporan Lembaga Penelitian dan Pengabdian kepada
Masyarakat. Universitas Airlangga. Surabaya.
Apsari, Retna. 2009. Disertasi: Sistem Fuzzy Berbasis Laser Speckle Imaging Untuk
Deteksi Kualitas Enamel Gigi Akibat Paparan Laser Nd:YAG. Disertasi,
Program Pasca Sarjana, Universitas Airlangga. Surabaya.
Ayuni, Rinda C., Arifin, Rubiyanto, A., Sunarno, H., 2011. Deteksi Dini Keretakan
Struktur Beton dengan Menggunakan Fiber Optic Plastic : Jurusan Fisika,
FMIPA ITS.
Born and Wolf. 1980.Principle of Optics, 6
th ed. New York :Pergamon Press.
Crisp, John dan Elliot, Barry, 2008, Serat Optik: Sebuah Pengantar Optik, Erlangga,
Jakarta.
Fadlisyah. 2008. Pengantar Grafika Komputer. Penerbit: Erlangga. Jakarta.
Fishbane, P. M., 2005. The Nature of Science and Its Implications for Physics
Textbooks. Yale University.
Halim, A., 2012. Desain Sensor Pergeseran Serat Optik Arah Radial. Skripsi S-1,
Departemen Fisika, Fakultas Sains dan Teknologi Universitas Airlangga.
Surabaya.
Hanselman, D., Littlefield, B., 2000. The Student Edition of MATLAB:Alih Bahasa:
Jozep Edyanto. Andi-Yogyakarta.
Harun S. W., Yasin. M., H. Z., Yang, Kusminarto, Karyono, Harith
Ahmad. 2009, Estimation of Metal Surface Roughness Using Fiber Optic
Displacement Sensor; Jurnal of Laser Physic. Vol. 20. No. 4
Hecth, Eugene J., 1999, Optics, Addison-Wesley Publishing Company, USA.
Hertiningsih, A., 2008. Teknik Pencitraan Warna Digital. Laporan Penelitian.
Universitas Gadjah Mada. Yogyakarta.
Hidayah, N.A., Suliyanti, M. M., Suryadi. 2010. Pengaruh Optical Chopper pada
Interaksi Laser DPPS dengan Material Silicon Rubber. Jurnal Ilmu
Pengetahuan dan Teknologi. Pusat Penelitian Fisika LIPI, Vol. 28
Indrawati, L. Himawan, Laura, S., 2008. Gigi Tiruan Precision Attachment Sebagai
Salah Satu Alternatif Perawatan Kasus Bilateral Free End Rahang Atas;
Jurnal Kedokteran Gigi. Universitas Indonesia, Vol. 23, No. 2
Jenkins and White. 1984. Fundamental of Optics. New York :John Willey and Sons.
Keiser, W., Garreth, C.G.B. 1991. Laser and Non-Linear Optics. Willey Eastern.
Kenneth, J., 2003. Buku Ajar Ilmu Kedokteran Gigi, Alih Bahasa: Johan Arief
Budiman. Edisi 10. EGC. Jakarta.
Kurniawan, Wawan, 2008. Rancang Bangun Sensor Pergeseran Mikro. IKIP PGRI
SEMARANG. Semarang.
Laud, B. B., 1998. Laser dan Optik Non Linier. Penterjemah : Susanto. Universitas
Indonesia. Jakarta.
Luthfi, Ruhan. 2011. Penentuan Kerusakan Jaringan Kulit Mencit (Mus musculus)
Dengan Logika Fuzzy Berbasis Laser Speckle Imaging. Skripsi S-1. Prodi S1
Fisika, Departemen Fisika, Universitas Airlangga. Surabaya.
Marshal, Banes. 2004. 3D Stereoscopic Hologram Glasses. Books of Google.
Diakses pada tanggal 10 Desember 2012.
Nindiyasari, Rizka. 2012. Rancang Bangun NPWT (negative Pressure Wound
Therapy) untuk Mempercepat Pertumbuhan Ulkus Diabetik Berbasis
Mikrokontroler. Skripsi S-1. Prodi S1 Teknobiomedik, Departemen Fisika,
Universitas Airlangga. Surabaya.
Nuning F. 2004. Gigi Tiruan Sebagian Lepasan Fleksibel Sebagai Alternatif
Perawatan Kehilangan Gigi. JITEKGI. Jakarta.
Philips, B., 2003, Buku Ajar Ilmu Bahan Kedokteran Gigi 10
thed. Jakarta. EGC:103-8
Pramono, Y.H., Rohedi, Y.A., Samian. 2008. Jurnal Fisika dan aplikasinya : Aplikasi
Directional Coupler Serat Optik Sebagai Sensor Pergerakan : FMIPA ITS;
4(2).
Putra, Randis P., 2012. Pemanfaatan Sensor Pergeseran Serat Optik untuk
Mendeteksi Sinyal Fotoakustik pada Sampel Cairan Gula Darah. Skripsi S-1.
Departemen Fisika, Universitas Airlangga. Surabaya.
Rahman, Abdul Husna, Adi Izhar Che Ani,Sulaiman Wadi Harun, Yasin, M., Apsari,
Retna and Harith Ahmad. 2012.(a) SIGN Guideline. Feasibility of Fiber
Optic Displacement Sensor Scanning System for Imaging of Dental Cavity.
Journal of Biomedical; Vol. 17, No.7.
Rahman, Abdul Husna, Rahim, H.R.A, Sulaiman Wadi Harun, Yasin, M., Apsari,
Retna and Harith Ahmad. 2012.(b) Detection of Stain Formation teeth by
Oral Antiseptic Solution Using Fiber Optic Displacement Sensor Journal of
Laser Physic; Vol.20, No.4.
Sarti, N. C., 2011. Mengubah Citra Berwarna Menjadi Grayscale dan Citra Biner.
Jurnal Teknologi Informasi. DINAMIK. Vol. 16, No. 1.
Sasmitaninghidayah, Wiwis. 2011. Pengembangan Metode Penstabil Sumber Cahaya
Laser He-Ne. Jurusan Fisika. FMIPA, Institut Teknologi Sepuluh November.
Surabaya
Sklodowski , M., 2003. Theory and Applicaton of Fiber Optics Sensor to Settement of
Sucahyo, Aris. 2009. Aplikasi Multimode fiber coupler sebagai sensor pergeseran
menggunakan LED sebagai Sumber Cahaya, Skripsi S-1, Departemen Fisika,
Fakulltas Sains dan Teknologi Universitas Airlangga. Surabaya
Sukmaningrum, Retno. 2011. Analisis Efisiensi Daya Transimisi Daya Optik Lewat
Bundel Serat Optik. EEPIS. Polikteknik Elktronika Negeri. Surabaya.
Suzuki, E. 2002. High-resolution scanning electron microscopy of
immunogold-labelled cells by the use of thin plasma coating of osmium. Journal of
Microscopy 208 (3): 153–157.
Tinanoff N. 2002. Caries Management in Children: Decision-Making
and Therapies. Compendium; 23(12):9–13.
Yasin. M., Sulaiman W. Harun, Kusminarto, Karyono, A. H. Zaidan, Kavintheran T.,
Harith Ahmad. 2009, Design and Operation of a concentric- Fiber
Displacement Sensor; Vol. 28. No. 4
Yasin. M., Kusminarto, Karyono,. 2008, Rancang Bangun Sistem Sensor Nano
Pergeseran Menggunakan Serat Optik Bundel Step-Index Multiragam Secara
Digital. Laporan Penelitian, Lembaga Penelitian dan Pengabdian kepada
Masyarakat. Universitas Airlangga. Surabaya.
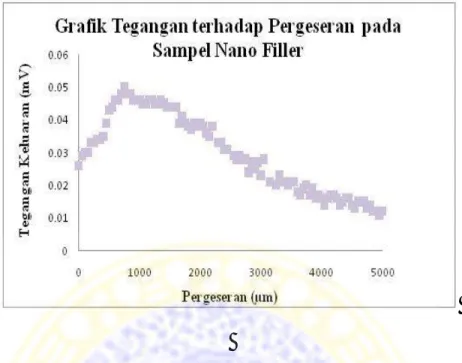
Lampiran 2
Data Hasil Tegangan Keluaran Terhadap Pergeseran
Z
(µm)
Acrylic
Denture
(mV)
Nano Hybrid
Compossite
(mV)
Varplast
(mV)
Nano Filler
(mV)
0
0.111
0.085
0.015
0.026
50
0.112
0.086
0.015
0.029
100
0.113
0.086
0.016
0.03
150
0.113
0.091
0.02
0.03
200
0.114
0.096
0.025
0.033
250
0.115
0.099
0.028
0.033
300
0.12
0.105
0.032
0.034
350
0.125
0.114
0.035
0.034
400
0.135
0.129
0.041
0.035
450
0.148
0.139
0.043
0.039
500
0.16
0.146
0.051
0.043
550
0.173
0.149
0.05
0.044
600
0.182
0.157
0.056
0.046
650
0.19
0.163
0.053
0.046
700
0.205
0.162
0.06
0.048
750
0.217
0.173
0.058
0.05
800
0.219
0.174
0.057
0.048
850
0.231
0.17
0.06
0.048
900
0.226
0.169
0.06
0.046
950
0.238
0.17
0.065
0.046
1000
0.238
0.174
0.065
0.046
1050
0.239
0.165
0.063
0.045
1100
0.24
0.168
0.06
0.045
1150
0.243
0.169
0.062
0.046
1200
0.234
0.165
0.062
0.046
1250
0.243
0.164
0.061
0.045
1300
0.236
0.164
0.058
0.045
1350
0.23
0.16
0.057
0.046
1400
0.233
0.157
0.055
0.045
1450
0.229
0.159
0.053
0.044
1500
0.221
0.154
0.052
0.044
Z
(µm)
Acrylic
Denture
(mV)
Nano Hybrid
Compossite
(mV)
Varplast
(mV)
Nano Filler
(mV)
1600
0.206
0.149
0.047
0.039
1650
0.214
0.144
0.046
0.041
1700
0.21
0.145
0.046
0.039
1750
0.203
0.141
0.045
0.038
1800
0.195
0.14
0.043
0.037
1850
0.195
0.137
0.042
0.039
1900
0.193
0.133
0.043
0.038
1950
0.186
0.127
0.041
0.039
2000
0.176
0.124
0.04
0.038
2050
0.178
0.128
0.04
0.036
2100
0.167
0.12
0.04
0.035
2150
0.165
0.118
0.037
0.038
2200
0.163
0.116
0.033
0.033
2250
0.157
0.113
0.035
0.033
2300
0.153
0.112
0.033
0.031
2350
0.151
0.108
0.031
0.031
2400
0.148
0.111
0.031
0.029
2450
0.146
0.107
0.031
0.028
2500
0.145
0.103
0.031
0.029
2550
0.135
0.102
0.031
0.028
2600
0.135
0.101
0.027
0.028
2650
0.137
0.101
0.028
0.024
2700
0.131
0.098
0.026
0.027
2750
0.124
0.098
0.024
0.025
2800
0.129
0.097
0.022
0.027
2850
0.127
0.094
0.021
0.023
2900
0.121
0.091
0.025
0.028
2950
0.121
0.09
0.023
0.021
3000
0.117
0.087
0.022
0.02
3050
0.109
0.085
0.021
0.023
3100
0.113
0.083
0.018
0.021
3150
0.106
0.083
0.021
0.021
3200
0.108
0.079
0.021
0.02
3250
0.107
0.081
0.021
0.021
Z
(µm)
Acrylic
Denture
(mV)
Nano Hybrid
Compossite
(mV)
Varplast
(mV)
Nano Filler
(mV)
3300
0.104
0.08
0.02
0.021
3350
0.104
0.076
0.016
0.018
3400
0.095
0.075
0.02
0.017
3450
0.103
0.074
0.016
0.019
3500
0.097
0.073
0.015
0.02
3550
0.093
0.07
0.016
0.017
3600
0.091
0.071
0.015
0.019
3650
0.096
0.071
0.015
0.016
3700
0.086
0.068
0.015
0.017
3750
0.089
0.068
0.015
0.016
3800
0.081
0.068
0.016
0.014
3850
0.085
0.065
0.015
0.016
3900
0.079
0.067
0.013
0.017
3950
0.081
0.065
0.013
0.017
4000
0.082
0.064
0.013
0.016
4050
0.083
0.062
0.012
0.014
4100
0.078
0.06
0.011
0.015
4150
0.078
0.061
0.011
0.016
4200
0.073
0.059
0.01
0.016
4250
0.078
0.057
0.008
0.014
4300
0.079
0.059
0.008
0.013
4350
0.073
0.058
0.01
0.015
4400
0.071
0.056
0.015
4450
0.071
0.056
0.015
4500
0.07
0.055
0.013
4550
0.069
0.055
0.014
4600
0.067
0.055
0.012
4650
0.068
0.055
0.012
4700
0.067
0.053
0.011
4750
0.068
0.053
0.012
4800
0.064
0.054
0.012
4850
0.065
0.053
0.011
4900
0.065
0.049
4950
0.064
0.049
Z
(µm)
Acrylic
Denture
(mV)
Nano Hybrid
Compossite
(mV)
Varplast
(mV)
Nano Filler
(mV)
5000
0.066
0.049
5050
0.063
5100
0.059
5150
0.058
5200
0.058
5250
0.061
5300
0.058
5350
0.058
5400
0.055
5450
0.056
5500
0.055
Lampiran 3
Hasil Analisis Tegangan Keluaran Terhadap Pergeseran untuk Sampel Bahan Gigi
Tiruan
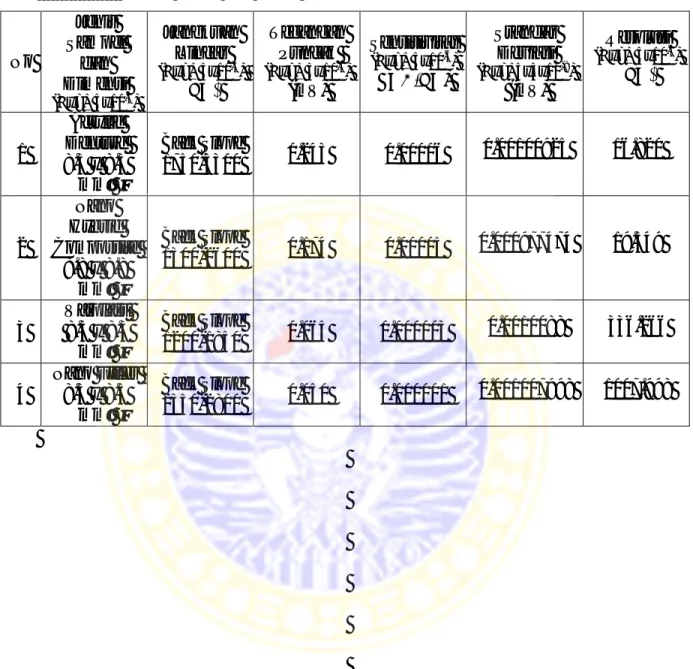
Tabel L.3.1 Kinerja sensor pergeseran mikro pada daerah front slope untuk setiap
sampel bahan gigi tiruan
No
Jenis
Sampel
dan
Dimensi
(∆x=+ 5x10
-4
)
Jangkuan
Linear
(∆x=+ 5x10
-3
)
(µm)
Tegangan
Puncak
(∆x=+ 5x10
-4
)
(mV)
Sensitivitas
(∆x=+ 5x10
-6
)
(mV/µm)
Standar
Deviasi
(∆x=+5x5x10
-9
)
(mV)
Resolusi
(∆x=+ 5x10
-4
)
(µm)
1
Acrylic
Denture
8.3 x 8.3
mm²
Front Slope
150 - 850
0.243
0.00021
0.00100925
5.311
2
Nano
Hybrid
Compossite
8.8 x 8.8
mm²
Front Slope
100 - 800
0.174
0.00014
0.000977474
6.981
3
Varplast
8.3 x 8.3
mm²
Front Slope
50 - 700
0.065
0.00007
0.0010088
14.411
4
Nano Filler
8.5 x 8.5
mm²
Front Slope
150 - 750
0.050
0.00004
0.001007998
25.199
Tabel L.3.2 Kinerja sensor pergeseran mikro pada daerah back slope untuk setiap
sampel bahan gigi tiruan
No
Jenis
Sampel
dan
Dimensi
(∆x=+ 5x10
-4
)
Jangkuan
Linear
(∆x=+ 5x10
-3
)
(µm)
Tegangan
Puncak
(∆x=+ 5x10
-4
)
(mV)
Sensitivitas
(∆x=+ 5x10
-6
)
(mV/µm)
Standar
Deviasi
(∆x=+5x5x10
-9
)
(mV)
Resolusi
(∆x=+ 5x10
-4
)
(µm)
1
Acrylic
Denture
8.3 x 8.3
mm²
Back Slope
1750-3300
0.243
0.00006
0.00100925
16.820
2
Nano
Hybrid
Compossite
8.8 x 8.8
mm²
Back Slope
1300-2600
0.174
0.00005
0.000977474
19.549
3
Varplast
8.3 x 8.3
mm²
Back Slope
1200-1850
0.065
0.000003
0.0010088
336.266
4
Nano Filler
8.5 x 8.5
mm²
Back Slope
2350-2800
0.050
0.000001
0.001007998
1007.998
Lampiran 4
Data Hasil pengukuran stabilitas intensitas sistem sensor pergeseran mikro
N
Acrylic Denture
(mV)
Nano Hybrid Compossite
(mV)
Varplast
(mV)
Nano Filler
(mV)
1
0.243
0.174
0.064
0.049
2
0.242
0.172
0.064
0.048
3
0.242
0.173
0.063
0.047
4
0.243
0.174
0.065
0.049
5
0.245
0.172
0.065
0.05
6
0.242
0.174
0.064
0.048
7
0.242
0.172
0.064
0.047
8
0.243
0.173
0.063
0.048
9
0.243
0.172
0.065
0.049
10
0.243
0.174
0.065
0.05
11
0.242
0.172
0.064
0.048
12
0.242
0.173
0.064
0.049
13
0.243
0.171
0.063
0.048
14
0.243
0.173
0.065
0.049
15
0.242
0.172
0.065
0.049
16
0.243
0.173
0.063
0.05
17
0.243
0.171
0.065
0.048
18
0.242
0.172
0.065
0.049
19
0.244
0.174
0.064
0.05
20
0.242
0.172
0.064
0.05
21
0.242
0.173
0.063
0.048
22
0.241
0.172
0.063
0.049
23
0.243
0.174
0.065
0.048
24
0.243
0.172
0.065
0.049
25
0.243
0.173
0.064
0.05
26
0.242
0.171
0.064
0.05
27
0.243
0.174
0.063
0.049
28
0.242
0.172
0.065
0.048
29
0.241
0.173
0.065
0.049
30
0.242
0.173
0.064
0.05
31
0.241
0.173
0.064
0.05
32
0.243
0.172
0.063
0.05
33
0.242
0.171
0.065
0.049
34
0.243
0.172
0.064
0.049
N
Acrylic Denture
(mV)
Nano Hybrid Compossite
(mV)
Varplast
(mV)
Nano Filler
(mV)
35
0.242
0.173
0.064
0.05
36
0.241
0.174
0.063
0.05
37
0.243
0.172
0.065
0.048
38
0.242
0.174
0.065
0.049
39
0.241
0.172
0.064
0.048
40
0.242
0.173
0.063
0.049
41
0.241
0.172
0.065
0.05
42
0.243
0.174
0.065
0.05
43
0.242
0.172
0.064
0.049
44
0.243
0.174
0.064
0.048
45
0.242
0.173
0.063
0.049
46
0.241
0.172
0.063
0.05
47
0.243
0.173
0.065
0.05
48
0.242
0.172
0.064
0.048
49
0.241
0.172
0.064
0.049
50
0.242
0.174
0.064
0.05
51
0.241
0.172
0.063
0.05
52
0.243
0.171
0.065
0.048
53
0.242
0.172
0.062
0.049
54
0.243
0.173
0.063
0.048
55
0.242
0.171
0.064
0.049
56
0.243
0.173
0.063
0.048
57
0.242
0.174
0.065
0.05
58
0.241
0.172
0.063
0.049
59
0.242
0.174
0.065
0.047
60
0.242
0.171
0.063
0.049
61
0.243
0.173
0.064
0.048
62
0.242
0.172
0.064
0.05
63
0.243
0.174
0.063
0.047
64
0.242
0.172
0.065
0.049
65
0.243
0.173
0.064
0.048
66
0.243
0.173
0.063
0.049
67
0.242
0.172
0.065
0.05
68
0.245
0.173
0.064
0.047
69
0.242
0.174
0.063
0.048
70
0.241
0.172
0.065
0.049
71
0.243
0.174
0.062
0.048
N
Acrylic Denture
(mV)
Nano Hybrid Compossite
(mV)
Varplast
(mV)
Nano Filler
(mV)
73
0.245
0.174
0.062
0.05
74
0.242
0.173
0.063
0.048
75
0.241
0.174
0.065
0.05
76
0.243
0.172
0.065
0.048
77
0.244
0.174
0.064
0.049
78
0.245
0.172
0.061
0.047
79
0.241
0.173
0.063
0.05
80
0.243
0.172
0.063
0.048
81
0.242
0.174
0.065
0.049
82
0.241
0.171
0.063
0.047
83
0.242
0.173
0.064
0.05
84
0.242
0.174
0.065
0.048
85
0.243
0.172
0.063
0.05
86
0.242
0.174
0.061
0.047
87
0.243
0.171
0.063
0.049
88
0.243
0.173
0.063
0.05
89
0.242
0.172
0.065
0.048
90
0.243
0.174
0.065
0.05
91
0.244
0.172
0.063
0.047
92
0.242
0.173
0.065
0.05
93
0.244
0.172
0.063
0.049
94
0.242
0.174
0.063
0.047
95
0.243
0.173
0.065
0.05
96
0.244
0.172
0.063
0.048
97
0.241
0.174
0.064
0.049
98
0.242
0.171
0.063
0.048
99
0.243
0.173
0.061
0.047
100
0.246
0.174
0.064
0.049
STDV
0.00101
0.00098
0.00101
0.00101
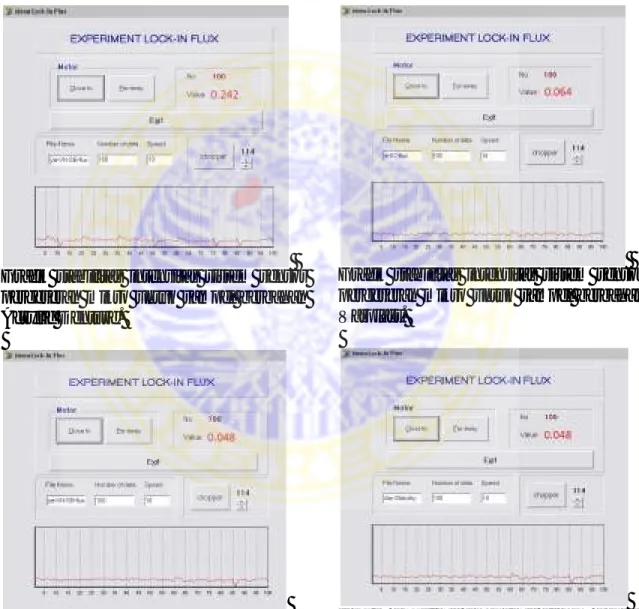
LAMPIRAN 5
Grafik Stabilitas Intensitas Sistem Sensor Pergeseran Mikro
1.
Grafik stabilitas intensitas dengan program Delphi sebagai proses digitasi dan
otomasi
Grafik stabilitas intensitas sistem sensor
pergeseran mikro untuk sampel berbahan
Acrylic Denture.
Grafik stabilitas intensitas sistem
sensor pergeseran mikro untuk sampel
berbahan Nano Hybrid Compossite.
Grafik stabilitas intensitas sistem sensor
pergeseran mikro untuk sampel berbahan
Varplast.
Grafik stabilitas intensitas sistem sensor
pergeseran mikro untuk sampel berbahan
Lampiran 6
Data Hasil Scanning Sampel Bahan Gigi Tiruan yang Dilubangi dan Sampel Bahan Gigi Tiruan Tanpa Lubang.
Z
(µm)
Arylic Denture
Nano Hybrid Compossite
Varplast
Nano Filler
Dengan
Lubang
Tanpa
Lubang
Dengan
Lubang
Tanpa
Lubang
Dengan
Lubang
Tanpa
Lubang
Dengan
Lubang
Tanpa
Lubang
0
0.021
0.022
0.003
0.003
0.001
0.003
0.01
0.012
1
0.028
0.027
0.004
0.004
0.004
0.004
0.014
0.014
2
0.033
0.034
0.005
0.006
0.004
0.004
0.019
0.019
3
0.065
0.064
0.008
0.007
0.006
0.006
0.028
0.028
4
0.121
0.128
0.015
0.015
0.008
0.009
0.03
0.03
5
0.203
0.204
0.019
0.018
0.009
0.01
0.029
0.029
6
0.209
0.211
0.02
0.02
0.022
0.023
0.027
0.028
7
0.097
0.208
0.005
0.018
0.04
0.039
0.02
0.027
8
0.045
0.213
0.003
0.019
0.04
0.04
0.01
0.025
9
0.033
0.2
0.003
0.018
0.011
0.041
0.009
0.026
10
0.029
0.229
0.003
0.016
0.003
0.04
0.008
0.027
11
0.025
0.228
0.003
0.016
0.001
0.04
0.008
0.026
12
0.026
0.22
0.003
0.017
0.001
0.037
0.009
0.025
13
0.029
0.196
0.003
0.016
0.001
0.037
0.008
0.026
14
0.029
0.203
0.004
0.017
0.001
0.037
0.014
0.025
15
0.032
0.209
0.003
0.018
0.001
0.037
0.017
0.027
16
0.098
0.207
0.005
0.018
0.001
0.037
0.019
0.028
17
0.207
0.209
0.018
0.019
0.001
0.04
0.028
0.027
18
0.22
0.23
0.018
0.019
0.01
0.039
0.025
0.026
19
0.239
0.239
0.015
0.016
0.037
0.037
0.02
0.023
20
0.171
0.144
0.008
0.008
0.037
0.036
0.015
0.019
21
0.059
0.057
0.005
0.004
0.026
0.025
0.015
0.016
22
0.03
0.027
0.005
0.005
0.008
0.008
0.013
0.014
23
0.029
0.025
0.004
0.004
0
0.009
0.012
0.011
24
0.027
0.023
0.004
0.003
0.002
0.001
0.006
0.0065
Lampiran 7
Data Hasil Scanning Sampel menggunakan Sistem Sensor Pergeseran Mikro
1.
Data hasil scanning sampel berbahan Acrylic Denture menggunakan sensor pergeseran mikro
Y=0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
X=0
0.03 0.03 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.033 0.033
1
0.03 0.03 0.033 0.033 0.032 0.033 0.031 0.032 0.033 0.031 0.032 0.033 0.031 0.032 0.033 0.031 0.032 0.033 0.031 0.032 0.033 0.031 0.033 0.033
2
0.03 0.03 0.033 0.031 0.03 0.031 0.033 0.03 0.031 0.033 0.03 0.031 0.033 0.03 0.031 0.033 0.03 0.031 0.033 0.03 0.031 0.033 0.031 0.031
3
0.03 0.03 0.033 0.033 0.032 0.031 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.033 0.033
4
0.03 0.03 0.031 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.032 0.033 0.033 0.033 0.033
5
0.03 0.03 0.033 0.033 0.039 0.031 0.031 0.033 0.03 0.031 0.033 0.03 0.031 0.033 0.03 0.031 0.033 0.03 0.024 0.021 0.032 0.033 0.033 0.033
6
0.03 0.03 0.033 0.033 0.032 0.033 0.028 0.03 0.033 0.043 0.053 0.06 0.063 0.06 0.034 0.046 0.036 0.034 0.024 0.02 0.032 0.033 0.033 0.033
7
0.03 0.03 0.033 0.033 0.029 0.033 0.031 0.03 0.053 0.081 0.114 0.122 0.131 0.112 0.058 0.091 0.068 0.031 0.031 0.024 0.033 0.033 0.033 0.033
8
0.03 0.03 0.033 0.031 0.028 0.033 0.04 0.04 0.124 0.192 0.216 0.22 0.215 0.207 0.103 0.15 0.113 0.043 0.031 0.027 0.033 0.033 0.031 0.031
9
0.03 0.03 0.031 0.033 0.03 0.031 0.08 0.064 0.225 0.241 0.225 0.203 0.215 0.196 0.191 0.219 0.163 0.073 0.03 0.029 0.031 0.031 0.033 0.033
10
0.03 0.03 0.033 0.033 0.033 0.04 0.155 0.155 0.235 0.215 0.183 0.139 0.195 0.157 0.225 0.183 0.21 0.115 0.028 0.028 0.033 0.033 0.033 0.033
11
0.03 0.03 0.033 0.033 0.044 0.063 0.222 0.222 0.204 0.134 0.056 0.043 0.137 0.051 0.165 0.14 0.179 0.159 0.038 0.029 0.033 0.033 0.033 0.033
12
0.03 0.03 0.033 0.033 0.065 0.112 0.237 0.221 0.127 0.045 0.038 0.034 0.041 0.033 0.095 0.079 0.149 0.201 0.054 0.034 0.033 0.033 0.033 0.033
13
0.03 0.03 0.033 0.033 0.092 0.165 0.237 0.214 0.061 0.04 0.033 0.033 0.036 0.033 0.038 0.044 0.11 0.237 0.081 0.038 0.033 0.033 0.033 0.033
14
0.03 0.03 0.031 0.033 0.112 0.207 0.228 0.168 0.05 0.033 0.031 0.031 0.033 0.031 0.033 0.041 0.087 0.236 0.112 0.047 0.031 0.031 0.033 0.033
15
0.03 0.03 0.033 0.031 0.112 0.23 0.213 0.149 0.05 0.031 0.033 0.033 0.031 0.033 0.031 0.033 0.067 0.225 0.139 0.062 0.033 0.033 0.031 0.031
16
0.03 0.03 0.033 0.033 0.112 0.224 0.215 0.149 0.056 0.033 0.029 0.031 0.033 0.031 0.033 0.031 0.071 0.22 0.156 0.069 0.033 0.033 0.033 0.033
17
0.03 0.03 0.033 0.033 0.091 0.2 0.23 0.137 0.083 0.042 0.033 0.033 0.031 0.033 0.031 0.033 0.085 0.224 0.148 0.069 0.033 0.033 0.033 0.033
18
0.03 0.03 0.033 0.033 0.063 0.18 0.222 0.152 0.115 0.064 0.042 0.036 0.033 0.032 0.033 0.053 0.129 0.22 0.144 0.067 0.033 0.033 0.033 0.033
19
0.03 0.03 0.031 0.033 0.033 0.142 0.19 0.172 0.159 0.109 0.072 0.052 0.033 0.047 0.038 0.108 0.206 0.187 0.137 0.061 0.031 0.031 0.033 0.033
X
Y=0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
21
0.03 0.03 0.033 0.033 0.033 0.063 0.086 0.202 0.189 0.229 0.216 0.193 0.09 0.223 0.14 0.232 0.208 0.051 0.08 0.033 0.033 0.033 0.033 0.033
22
0.03 0.03 0.033 0.033 0.033 0.033 0.042 0.145 0.139 0.17 0.191 0.208 0.201 0.214 0.231 0.176 0.123 0.029 0.048 0.033 0.033 0.033 0.033 0.033
23
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.096 0.067 0.101 0.13 0.147 0.22 0.149 0.199 0.078 0.04 0.03 0.033 0.033 0.033 0.033 0.033 0.033
24
0.03 0.03 0.031 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.05 0.068 0.154 0.05 0.123 0.033 0.033 0.033 0.031 0.033 0.031 0.031 0.033 0.033
25
0.03 0.03 0.033 0.031 0.033 0.033 0.031 0.033 0.033 0.033 0.033 0.033 0.065 0.033 0.033 0.031 0.031 0.031 0.033 0.033 0.033 0.033 0.031 0.031
26
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.031 0.031 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033
27
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033
28
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033
29
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.031 0.033 0.033 0.033 0.033 0.033
30
0.03 0.03 0.033 0.031 0.033 0.033 0.031 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.031 0.031 0.031 0.033 0.033 0.033 0.033 0.031 0.031
31
0.03 0.03 0.031 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.031 0.031 0.033 0.033 0.033 0.033 0.033 0.031 0.031 0.033 0.033
21
0.03 0.03 0.033 0.033 0.033 0.063 0.086 0.202 0.189 0.229 0.216 0.193 0.09 0.223 0.14 0.232 0.208 0.051 0.08 0.033 0.033 0.033 0.033 0.033
22
0.03 0.03 0.033 0.033 0.033 0.033 0.042 0.145 0.139 0.17 0.191 0.208 0.201 0.214 0.231 0.176 0.123 0.029 0.048 0.033 0.033 0.033 0.033 0.033
23
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.096 0.067 0.101 0.13 0.147 0.22 0.149 0.199 0.078 0.04 0.03 0.033 0.033 0.033 0.033 0.033 0.033
24
0.03 0.03 0.031 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.05 0.068 0.154 0.05 0.123 0.033 0.033 0.033 0.031 0.033 0.031 0.031 0.033 0.033
25
0.03 0.03 0.033 0.031 0.033 0.033 0.031 0.033 0.033 0.033 0.033 0.033 0.065 0.033 0.033 0.031 0.031 0.031 0.033 0.033 0.033 0.033 0.031 0.031
26
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.031 0.031 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033
27
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033
28
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033
29
0.03 0.03 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.031 0.033 0.033 0.033 0.033 0.033
30
0.03 0.03 0.033 0.031 0.033 0.033 0.031 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.033 0.031 0.031 0.031 0.033 0.033 0.033 0.033 0.031 0.031
2.
Data hasil scanning sampel berbahan Nano Hybrid Compossite menggunakan sensor pergeseran mikro
Y=0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
X=0
0.0025 0.003 0.003 0.003 0.0025 0.003 0.003 0.003 0.0025 0.003 0.003 0.003 0.003 0.0025 0.003 0.003 0.003 0.003 0.0025 0.003 0.003 0.003
1
0.003 0.003 0.0025 0.003 0.003 0.0025 0.003 0.003 0.003 0.0025 0.003 0.0025 0.003 0.003 0.003 0.0025 0.003 0.003 0.0025 0.0025 0.003 0.003
2
0.003 0.003 0.003 0.0025 0.003 0.003 0.0025 0.0025 0.003 0.003 0.003 0.003 0.0025 0.0025 0.003 0.003 0.0025 0.003 0.003 0.003 0.003 0.0025
3
0.0025 0.0025 0.0025 0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.005 0.003 0.005 0.005 0.003 0.003 0.003 0.003 0.0025 0.003 0.0025 0.003
4
0.003 0.003 0.003 0.003 0.0025 0.003 0.005 0.005 0.005 0.013 0.013 0.005 0.013 0.013 0.005 0.005 0.003 0.0025 0.003 0.0025 0.003 0.0025
5
0.0025 0.0025 0.0025 0.003 0.003 0.003 0.005 0.013 0.013 0.015 0.015 0.015 0.013 0.013 0.013 0.005 0.0025 0.003 0.0025 0.003 0.003 0.003
6
0.003 0.003 0.0025 0.0025 0.003 0.005 0.013 0.013 0.015 0.015 0.013 0.015 0.015 0.015 0.015 0.013 0.005 0.003 0.003 0.003 0.003 0.0025
7
0.0025 0.003 0.003 0.003 0.003 0.005 0.015 0.015 0.013 0.013 0.013 0.013 0.013 0.015 0.015 0.013 0.005 0.005 0.0025 0.003 0.0025 0.003
8
0.003 0.003 0.003 0.003 0.005 0.013 0.015 0.015 0.005 0.005 0.005 0.005 0.005 0.013 0.013 0.015 0.013 0.005 0.003 0.003 0.003 0.003
9
0.003 0.0025 0.003 0.0025 0.005 0.015 0.015 0.005 0.005 0.008 0.008 0.008 0.005 0.005 0.008 0.015 0.013 0.005 0.003 0.0025 0.003 0.003
10
0.0025 0.003 0.003 0.005 0.005 0.015 0.013 0.005 0.008 0.008 0.003 0.0025 0.008 0.005 0.005 0.013 0.015 0.013 0.005 0.003 0.0025 0.0025
11
0.003 0.003 0.0025 0.005 0.005 0.013 0.015 0.008 0.008 0.003 0.003 0.003 0.008 0.008 0.005 0.013 0.015 0.013 0.005 0.003 0.003 0.003
12
0.003 0.003 0.003 0.005 0.013 0.013 0.015 0.008 0.0025 0.003 0.0025 0.0025 0.003 0.008 0.005 0.015 0.015 0.015 0.005 0.0025 0.003 0.0025
13
0.0025 0.003 0.003 0.005 0.015 0.015 0.013 0.005 0.003 0.003 0.003 0.003 0.0025 0.003 0.013 0.015 0.015 0.015 0.005 0.003 0.0025 0.003
14
0.003 0.003 0.0025 0.005 0.015 0.015 0.015 0.008 0.003 0.0025 0.003 0.0025 0.003 0.008 0.005 0.013 0.015 0.013 0.005 0.0025 0.003 0.0025
15
0.0025 0.003 0.003 0.005 0.013 0.015 0.015 0.008 0.008 0.003 0.0025 0.003 0.008 0.008 0.005 0.013 0.015 0.013 0.005 0.003 0.003 0.003
16
0.003 0.003 0.0025 0.005 0.013 0.015 0.013 0.005 0.008 0.0025 0.008 0.0025 0.008 0.005 0.015 0.015 0.013 0.005 0.003 0.0025 0.003 0.0025
17
0.0025 0.003 0.003 0.005 0.013 0.013 0.015 0.015 0.005 0.008 0.008 0.008 0.005 0.005 0.015 0.013 0.013 0.005 0.0025 0.003 0.003 0.003
18
0.003 0.0025 0.0025 0.003 0.005 0.013 0.013 0.015 0.015 0.005 0.005 0.005 0.005 0.015 0.015 0.013 0.013 0.005 0.003 0.0025 0.003 0.003
19
0.003 0.003 0.003 0.003 0.005 0.005 0.013 0.015 0.015 0.013 0.013 0.013 0.015 0.015 0.013 0.013 0.005 0.003 0.003 0.003 0.0025 0.0025
20
0.0025 0.003 0.0025 0.003 0.005 0.003 0.005 0.013 0.013 0.015 0.015 0.013 0.013 0.013 0.013 0.005 0.005 0.003 0.003 0.003 0.003 0.003
21
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.013 0.013 0.013 0.015 0.005 0.013 0.005 0.005 0.003 0.003 0.0025 0.0025 0.003 0.0025
22
0.0025 0.0025 0.003 0.003 0.003 0.0025 0.003 0.003 0.005 0.013 0.013 0.005 0.005 0.005 0.005 0.003 0.003 0.0025 0.003 0.003 0.0025 0.003
0.003 0.003 0.003 0.0025 0.003 0.003 0.0025 0.0025 0.003 0.005 0.005 0.003 0.003 0.003 0.003 0.003 0.0025 0.003 0.003 0.003 0.003 0.003
X
Y=0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
24
0.0025 0.0025 0.003 0.003 0.0025 0.0025 0.003 0.003 0.003 0.003 0.003 0.0025 0.003 0.003 0.0025 0.003 0.003 0.003 0.0025 0.003 0.003 0.0025
25
0.0025 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.002 0.003 0.003 0.003 0.003 0.0025 0.003 0.003 0.0025 0.002 0.003
26
0.003 0.003 0.003 0.0025 0.0025 0.003 0.003 0.003 0.0025 0.003 0.003 0.003 0.003 0.0025 0.0025 0.0025 0.003 0.0025 0.003 0.003 0.003 0.0025
27
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.0025 0.003 0.0025 0.0025 0.003 0.0025 0.003 0.003 0.003 0.0025 0.003 0.003 0.003 0.003 0.003
28
0.003 0.0025 0.003 0.003 0.0025 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.0025 0.003 0.003 0.003 0.003 0.003 0.0025 0.003 0.0025
29
0.0025 0.003 0.003 0.003 0.003 0.0025 0.0025 0.003 0.003 0.0025 0.003 0.003 0.0025 0.003 0.003 0.0025 0.0025 0.003 0.0025 0.003 0.0025 0.003
30
0.003 0.0025 0.0025 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.0025 0.003 0.0025 0.003 0.003 0.0025 0.0025 0.0025 0.003 0.003 0.003
3.
Data hasil scanning sampel berbahan Varplast menggunakan sensor pergeseran mikro
Y=0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
X=0
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
1
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
2
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
3
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.005 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
4
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.005 0.005 0.005 0.005 0.003 0.003 0.003 0.003 0.003 0.003 0.003
5
0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.005 0.005 0.005 0.008 0.013 0.013 0.008 0.008 0.005 0.003 0.003 0.003 0.003 0.003 0.003
6
0.003 0.003 0.003 0.003 0.003 0.005 0.005 0.008 0.013 0.013 0.015 0.015 0.015 0.015 0.013 0.013 0.005 0.003 0.003 0.003 0.003 0.003
7
0.003 0.003 0.003 0.003 0.005 0.005 0.008 0.013 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.013 0.005 0.003 0.003 0.003 0.003
8
0.003 0.003 0.003 0.003 0.005 0.008 0.015 0.015 0.015 0.015 0.013 0.008 0.008 0.013 0.015 0.015 0.015 0.005 0.005 0.003 0.003 0.003
9
0.003 0.003 0.003 0.005 0.008 0.013 0.015 0.015 0.013 0.013 0.008 0.005 0.005 0.005 0.013 0.013 0.015 0.008 0.005 0.003 0.003 0.003
10
0.003 0.003 0.003 0.005 0.008 0.013 0.015 0.013 0.008 0.008 0.005 0.005 0.005 0.005 0.008 0.008 0.015 0.013 0.005 0.003 0.003 0.003
11
0.003 0.003 0.003 0.005 0.013 0.015 0.015 0.008 0.005 0.005 0.005 0.005 0.003 0.005 0.005 0.008 0.015 0.015 0.008 0.005 0.003 0.003
12
0.003 0.003 0.003 0.005 0.015 0.015 0.015 0.005 0.005 0.005 0.003 0.003 0.003 0.003 0.005 0.008 0.008 0.015 0.013 0.005 0.003 0.003
13
0.003 0.003 0.003 0.005 0.015 0.015 0.013 0.005 0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.005 0.013 0.015 0.015 0.005 0.003 0.003
14
0.003 0.003 0.003 0.005 0.015 0.015 0.013 0.005 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.013 0.015 0.015 0.005 0.003 0.003
15
0.003 0.003 0.005 0.008 0.015 0.015 0.008 0.008 0.005 0.005 0.003 0.003 0.003 0.003 0.003 0.005 0.008 0.015 0.013 0.005 0.003 0.003
16
0.003 0.003 0.005 0.013 0.015 0.015 0.008 0.008 0.005 0.005 0.003 0.003 0.003 0.003 0.003 0.005 0.015 0.015 0.008 0.005 0.003 0.003
17
0.003 0.003 0.005 0.013 0.015 0.015 0.015 0.008 0.008 0.008 0.005 0.003 0.003 0.003 0.005 0.008 0.015 0.013 0.005 0.003 0.003 0.003
18
0.003 0.003 0.005 0.008 0.013 0.015 0.015 0.015 0.008 0.008 0.005 0.005 0.005 0.005 0.005 0.013 0.015 0.013 0.005 0.003 0.003 0.003
19
0.003 0.003 0.005 0.008 0.008 0.013 0.015 0.015 0.013 0.013 0.008 0.008 0.005 0.008 0.008 0.015 0.015 0.008 0.005 0.003 0.003 0.003
20
0.003 0.003 0.003 0.005 0.005 0.008 0.013 0.015 0.015 0.015 0.015 0.013 0.013 0.015 0.015 0.015 0.013 0.008 0.005 0.003 0.003 0.003
21
0.003 0.003 0.003 0.005 0.005 0.005 0.008 0.013 0.015 0.015 0.015 0.015 0.015 0.015 0.015 0.013 0.008 0.005 0.005 0.003 0.003 0.003
22
0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.008 0.008 0.008 0.013 0.015 0.015 0.005 0.008 0.005 0.005 0.003 0.003 0.003 0.003 0.003
X
Y=0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
24
0.003 0.003 0.003 0.003 0.002 0.003 0.003 0.005 0.005 0.005 0.005 0.005 0.005 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
25
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.005 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
26
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
27
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
28
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
29
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
30
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
31
0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003 0.003
4.
Data hasil scanning sampel berbahan Nano Filler menggunakan sensor pergeseran mikro
Y=0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
X=0
0.003 0.002 0.002 0.004 0.003 0.004 0.004 0.002 0.003 0.002 0.004 0.004 0.003 0.002 0.004 0.004 0.003 0.002 0.004 0.004 0.003 0.003 0.002
1
0.004 0.003 0.004 0.003 0.002 0.003 0.002 0.003 0.004 0.003 0.004 0.003 0.004 0.003 0.002 0.003 0.004 0.003 0.002 0.003 0.004 0.004 0.004
2
0.003 0.003 0.002 0.002 0.004 0.004 0.003 0.004 0.002 0.004 0.003 0.002 0.002 0.004 0.003 0.004 0.002 0.004 0.003 0.002 0.002 0.002 0.003
3
0.004 0.004 0.003 0.003 0.002 0.003 0.018 0.015 0.019 0.019 0.019 0.019 0.017 0.016 0.015 0.018 0.01 0.003 0.002 0.003 0.002 0.002 0.004
4
0.002 0.002 0.003 0.003 0.012 0.014 0.029 0.023 0.029 0.044 0.044 0.049 0.049 0.048 0.048 0.048 0.048 0.012 0.009 0.002 0.004 0.002 0.002
5
0.003 0.002 0.002 0.002 0.013 0.025 0.038 0.044 0.044 0.03 0.028 0.023 0.026 0.025 0.038 0.038 0.038 0.044 0.014 0.002 0.003 0.003 0.003
6
0.004 0.003 0.004 0.016 0.021 0.039 0.043 0.044 0.031 0.021 0.002 0.003 0.023 0.024 0.038 0.043 0.043 0.044 0.016 0.016 0.004 0.003 0.004
7
0.003 0.003 0.002 0.031 0.033 0.052 0.043 0.038 0.023 0.003 0.004 0.003 0.002 0.003 0.038 0.043 0.052 0.038 0.044 0.031 0.002 0.004 0.002
8
0.004 0.004 0.003 0.04 0.049 0.051 0.022 0.023 0.002 0.004 0.003 0.002 0.002 0.004 0.003 0.022 0.051 0.043 0.044 0.04 0.003 0.002 0.003
9
0.002 0.002 0.003 0.038 0.048 0.043 0.014 0.023 0.002 0.004 0.003 0.003 0.002 0.004 0.003 0.016 0.014 0.038 0.038 0.038 0.004 0.002 0.004
10
0.004 0.002 0.002 0.031 0.043 0.032 0.016 0.003 0.003 0.002 0.003 0.004 0.003 0.002 0.003 0.013 0.016 0.031 0.04 0.031 0.002 0.003 0.002
11
0.003 0.003 0.004 0.04 0.046 0.038 0.013 0.003 0.004 0.002 0.002 0.002 0.004 0.002 0.002 0.004 0.013 0.03 0.036 0.04 0.003 0.003 0.003
12
0.004 0.003 0.002 0.041 0.044 0.046 0.017 0.004 0.002 0.003 0.004 0.003 0.002 0.003 0.004 0.002 0.017 0.023 0.041 0.041 0.004 0.004 0.004
13
0.002 0.004 0.003 0.036 0.053 0.041 0.021 0.021 0.003 0.003 0.002 0.004 0.003 0.003 0.002 0.041 0.021 0.053 0.036 0.036 0.002 0.002 0.003
14
0.003 0.002 0.003 0.03 0.049 0.036 0.023 0.014 0.003 0.002 0.004 0.002 0.003 0.002 0.004 0.023 0.023 0.049 0.03 0.03 0.002 0.002 0.004
15
0.004 0.002 0.002 0.023 0.051 0.034 0.025 0.017 0.017 0.003 0.004 0.003 0.002 0.003 0.017 0.025 0.025 0.038 0.044 0.023 0.004 0.002 0.002
16
0.002 0.003 0.004 0.015 0.036 0.038 0.029 0.023 0.029 0.017 0.02 0.002 0.003 0.02 0.023 0.036 0.038 0.043 0.044 0.015 0.003 0.003 0.003
17
0.003 0.003 0.002 0.003 0.023 0.046 0.038 0.044 0.044 0.021 0.029 0.019 0.028 0.028 0.032 0.023 0.038 0.044 0.011 0.011 0.004 0.003 0.004
18
0.004 0.004 0.003 0.002 0.024 0.041 0.043 0.044 0.031 0.044 0.044 0.049 0.049 0.048 0.048 0.048 0.043 0.044 0.012 0.003 0.002 0.004 0.002
19
0.002 0.002 0.003 0.003 0.003 0.012 0.009 0.024 0.022 0.024 0.022 0.023 0.021 0.018 0.024 0.009 0.012 0.014 0.013 0.002 0.003 0.002 0.003
20
0.003 0.004 0.004 0.003 0.002 0.003 0.009 0.016 0.017 0.017 0.009 0.014 0.013 0.011 0.016 0.009 0.009 0.003 0.002 0.003 0.004 0.002 0.004
21
0.004 0.002 0.002 0.004 0.003 0.004 0.004 0.002 0.003 0.002 0.009 0.014 0.017 0.002 0.004 0.004 0.003 0.002 0.004 0.004 0.002 0.003 0.002
22
0.004 0.003 0.004 0.003 0.002 0.003 0.002 0.003 0.004 0.003 0.004 0.003 0.004 0.003 0.002 0.003 0.004 0.003 0.002 0.003 0.003 0.003 0.003
0.002 0.002 0.003 0.002 0.004 0.004 0.003 0.004 0.002 0.004 0.003 0.002 0.002 0.004 0.003 0.004 0.002 0.004 0.003 0.002 0.004 0.004 0.003
Lampiran 8
Komputasi Metode Optical imaging menggunakan Program Matlab R2008b
1.
Listing program
pada editor Matlab R2008b untuk estimasi diameter lubang
pada sampel gigi tiruan berbahan Acrylic Denture.
clc
x=0:1:23;
y=0:1:28;
[X,Y]=meshgrid(x,y);
Z=xlsread('acrylic.xlsx','B2
:Y30');
surf(X,Y,Z)
view(0,90)
axis tight
colorbar
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\acrylic_RGB',
'bmp')
a=imread('C:\Users\user\Docu
ments\MATLAB\acrylic_RGB.bmp
');
b=mat2gray(a);
figure,imshow(b)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\acrylic_Gray'
,'bmp');
figure,imhist(b)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\acrylic_Hist'
,'bmp');
[n m]=size(b)
for
i=1:n
for
j=1:m
if
(b(i,j)>=0.015)
d(i,j)=0;
else
d(i,j)=255;
end
end
end
figure,imshow(d)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\acrylic_thres
','bmp')
e=imcrop(d,[186 144
(374-186) (289-144)]);
figure,imshow(e)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\acrylic_hole'
,'bmp')
[p q]=size(e)
Pixelperinch=get(0,'ScreenPi
xelsPerInch')
Pixelperinch=Pixelperinch*25
.48
dpix_Horisontal=(sqrt(((((37
4-186)+1)-1)^2+(0)^2))*25.48*((11*0.5)
*0.5))
Diameter_Lubang_Gigi_Horizon
tal=(dpix_Horisontal/Pixelpe
rinch)
dpix_Vertikal=(sqrt((0)^2+((
(289-144)+1)-1)^2))*25.48*((14*0.5)*0.5)
Diameter_Lubang_Gigi_Vertika
l=(dpix_Vertikal/Pixelperinc
h)
%imcrop(d,[x1 y1 (x2-x1)
(y2-y1)]) %#
cropping the picture by
pixel position
%dpix=sqrt((x1-x2)^2+(y1-y2)^2) %#
calculate distance in pixels
%Pixelperinch=get(0,'ScreenP
ixelsPerInch') %# find
resolution of your display
%Diameter_Lubang_Gigi_=dpix/
pixperinch %# convert to
inches from pixels
%Pixpermm=Pixelperinch*25.48
%# convert to mm from inches
2.
Hasil dari command window Matlab R2008b untuk sampel gigi tiruan
berbahan Acrylic Denture.
n =
420
m =
560
p =
146
q =
189
Pixelperinch =
96
Pixelperinch =
2.4461e+003
dpix_Horisontal =
1.3173e+004
Diameter_Lubang_Gigi_Horizontal =
5.3854
dpix_Vertikal =
1.2931e+004
Diameter_Lubang_Gigi_Vertikal =
5.2865
3.
Listing program
pada editor Matlab R2008b untuk estimasi diameter lubang
pada sampel gigi tiruan berbahan Nano Hybrid Compossite.
clc
x=0:1:21;
y=0:1:30;
[X,Y]=meshgrid(x,y);
Z=xlsread('hybrid.xlsx','B2:
W32');
surf(X,Y,Z)
view(0,90)
axis tight
colorbar
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\hybrid_RGB','
bmp')
a=imread('C:\Users\user\Docu
ments\MATLAB\hybrid_RGB.bmp'
);
b=mat2gray(a);
figure,imshow(b)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\hybrid_Gray',
'bmp')
figure,imhist(b)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\hybrid_Hist',
'bmp')
[n m]=size(b)
for
i=1:n
for
j=1:m
if
b(i,j)>0.01568575
d(i,j)=0;
else
d(i,j)=255;
end
end
end
figure,imshow(d)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\hybrid_thres'
,'bmp')
e=imcrop(d,[178 159
(351-178) (294-158)]);
figure,imshow(e)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\hybrid_hole',
'bmp')
[p q]=size(e)
Pixelperinch=get(0,'ScreenPi
xelsPerInch')
Pixelperinch=Pixelperinch*25
.48
dpix_Horisontal=(sqrt(((((35
1-178)+1)-1)^2+(0)^2))*25.48*((11*0.5)
*0.5))
Diameter_Lubang_Gigi_Horizon
tal=(dpix_Horisontal/Pixelpe
rinch)
dpix_Vertikal=(sqrt((0)^2+((
(294-158)+1)-1)^2))*25.48*((14*0.5)*0.5)
Diameter_Lubang_Gigi_Vertika
l=(dpix_Vertikal/Pixelperinc
h)
%imcrop(d,[x1 y1 (x2-x1)
(y2-y1)]) %#
cropping the picture by
pixel position
%dpix=sqrt((x1-x2)^2+(y1-y2)^2) %#
calculate distance in pixels
%Pixelperinch=get(0,'ScreenP
ixelsPerInch') %# find
resolution of your display
%Diameter_Lubang_Gigi_=dpix/
pixperinch %# convert to
inches from pixels
%Pixpermm=Pixelperinch*25.48
%# convert to mm from inches
4.
Hasil dari command window Matlab R2008b untuk sampel gigi tiruan
berbahan Nano Hybrid Compossite.
n =
420
m =
560
p =
137
q =
174
Pixelperinch =
96
Pixelperinch =
2.4461e+003
dpix_Horisontal =
1.2122e+004
Diameter_Lubang_Gigi_Horizontal =
4.9557
dpix_Vertikal =
1.2128e+004
Diameter_Lubang_Gigi_Vertikal =
4.9583
5.
Listing program
pada editor Matlab R2008b untuk estimasi diameter lubang
pada sampel gigi tiruan berbahan Varplast.
clc
x=0:1:21;
y=0:1:31;
[X,Y]=meshgrid(x,y);
Z=xlsread('varplast.xlsx','B
2:W33');
surf(X,Y,Z)
view(0,90)
axis tight
colorbar
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\varplast_RGB'
,'bmp')
a=imread('C:\Users\user\Docu
ments\MATLAB\varplast_RGB.bm
p');
b=mat2gray(a);
figure,imshow(b)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\varplast_Gray
','bmp')
figure,imhist(b)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\varplast_Hist
','bmp')
[n m]=size(b)
for
i=1:n
for
j=1:m
if
b(i,j)>0.004;
d(i,j)=0;
else
d(i,j)=255;
end
end
end
figure,imshow(d)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\varplast_thre
s','bmp')
e=imcrop(d,[180 144
(367-180) (286-144)]);
figure,imshow(e)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\varplast_hole
','bmp')
[p q]=size(e)
Pixelperinch=get(0,'ScreenPi
xelsPerInch')
Pixelperinch=Pixelperinch*25
.48
dpix_Horisontal=(sqrt(((((36
7-180)+1)-1)^2+(0)^2))*25.48*((11*0.5)
*0.5))
Diameter_Lubang_Gigi_Horizon
tal=(dpix_Horisontal/Pixelpe
rinch)
dpix_Vertikal=(sqrt((0)^2+((
(286-144)+1)-1)^2))*25.48*((14*0.5)*0.5)
Diameter_Lubang_Gigi_Vertika
l=(dpix_Vertikal/Pixelperinc
h)
%imcrop(d,[x1 y1 (x2-x1)
(y2-y1)]) %#
cropping the picture by
pixel position
%dpix=sqrt((x1-x2)^2+(y1-y2)^2) %#
calculate distance in pixels
%Pixelperinch=get(0,'ScreenP
ixelsPerInch') %# find
resolution of your display
%Diameter_Lubang_Gigi_=dpix/
pixperinch %# convert to
inches from pixels
%Pixpermm=Pixelperinch*25.48
%# convert to mm from inches
6.
Hasil dari command window Matlab R2008b untuk sampel gigi tiruan
berbahan Varplast.
n =
420
m =
560
p =
143
q =
188
Pixelperinch =
96
Pixelperinch =
2.4461e+003
dpix_Horisontal =
1.3103e+004
Diameter_Lubang_Gigi_Horizontal =
5.3568
dpix_Vertikal =
1.2664e+004
Diameter_Lubang_Gigi_Vertikal =
5.1771
7.
Listing program
pada editor Matlab R2008b untuk estimasi diameter lubang
pada sampel gigi tiruan berbahan Nano Filler.
clc
x=0:1:22;
y=0:1:23;
[X,Y]=meshgrid(x,y);
Z=xlsread('filler.xlsx','B2:
X25');
surf(X,Y,Z)
view(0,90)
axis tight
colorbar
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\filer_RGB','b
mp')
a=imread('C:\Users\user\Docu
ments\MATLAB\filer_RGB.bmp')
;
b=mat2gray(a);
figure,imshow(b)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\filler_Gray',
'bmp')
figure,imhist(b)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\filler_Hist',
'bmp')
[n m]=size(b)
for
i=1:n
for
j=1:m
if
b(i,j)>0.04
d(i,j)=255;
else
d(i,j)=0;
end
end
end
figure,imshow(d)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\filler_thres'
,'bmp')
e=imcrop(d,[192 122
(372-192) (285-122)]);
figure,imshow(e)
saveas(gcf,'C:\Users\user\Do
cuments\MATLAB\filler_hole',
'bmp')
[p q]=size(e)
Pixelperinch=get(0,'ScreenPi
xelsPerInch')
Pixelperinch=Pixelperinch*25
.48
dpix_Horisontal=(sqrt(((((37
2-192)+1)-1)^2+(0)^2))*25.48*((11*0.5)
*0.5))
Diameter_Lubang_Gigi_Horizon
tal=(dpix_Horisontal/Pixelpe
rinch)
dpix_Vertikal=(sqrt((0)^2+((
(285-122)+1)-1)^2))*25.48*((14*0.5)*0.5)
Diameter_Lubang_Gigi_Vertika
l=(dpix_Vertikal/Pixelperinc
h)
%imcrop(d,[x1 y1 (x2-x1)
(y2-y1)]) %#
cropping the picture by
pixel position
%dpix=sqrt((x1-x2)^2+(y1-y2)^2) %#
calculate distance in pixels
%Pixelperinch=get(0,'ScreenP
ixelsPerInch') %# find
resolution of your display
%Diameter_Lubang_Gigi_=dpix/
pixperinch %# convert to
inches from pixels
%Pixpermm=Pixelperinch*25.48
%# convert to mm from inches