TUNING PROPORSIONAL INTEGRAL DERIVATIF MENGGUNAKAN JARINGAN SYARAF TIRUAN
PADA PENGENDALIAN TEMPERATUR HEAT EXCHANGER Supriyanto, Totok R. Biyanto
Jurusan Teknik Fisika - FTI – ITS Surabaya Kampus ITS Keputih Sukolilo Surabaya 60111
Telp : 62 31 5947188 Fax : 62 31 5923626 Email : [email protected]
ABSTRACT
Karakteristik pengendali PID tergantung pada harga tuning Kp, Ti dan. Memanipulasi harga Kp, Ti dan Td pada PID biasanya disebut gain schedulling. Gain schedulling dapat dilakukan dengan memanfaatkan kemampuan belajar Jaringan Syaraf Tiruan (JST).
Pada penelitian ini dikembangkan suatu alternatif sistem pengendalian dengan algoritma PID-JST untuk mengendalikan temperatur output heat exchanger di PPT Migas Cepu, dengan memanipulasi aliran panas yang masuk ke heat exchanger.
Hasil penelitian menunjukkan bahwa dengan diterapkannya sistem pengendalian nonlinier diperoleh peningkatkan kualitas sistem pengendalian pada unit ini yang meliputi respons sistem lebih cepat, tidak memiliki offset, serta bersifat kokoh terhadap perubahan setpoint dan kehadiran gangguan yang mempengaruhi proses.
Keywords: Proporsional Integral Derivatif, Neural Network, Heat Exchanger PENDAHULUAN
Kontrol Proporsional Integral Derivatif (PID) mempunyai karakteristik bekerja pada plant yang linier dan kinerjanya bergantung pada tuning. Jika terjadi gangguan pada plant yang melewati batas liniearitas PID, maka diperlukan tuning agar kontrol PID bekerja secara optimal (Norgaard, dkk, 2000). Permasalahan yang muncul adalah jika kontrol PID digunakan pada plant non linear, maka menjadi kurang efektif. Dalam penelitian ini, peneliti akan menggunakan Jaringan Syaraf tiruan (JST) dimana JST mempunyai kemampuan dalam memodelkan sistem bekerja pada plant yang non linier (Fausett, 1994) (Norgaard, dkk, 2000). JST berfungsi sebagai gain scheduling PID yang merubah – ubah parameter Kp, Ti dan Td sesuai kebutuhan plant (Biyanto, T. R. 2005).
Heat Exchanger (HE) atau sistem penukar panas merupakan proses perpindahan panas dari
fluida yang satu dengan fluida yang lain tanpa melibatkan pencampuran atau kontak langsung. Panas yang diberikan bergantung pada flow rate, energi yang dibawa pemanas, dan materi yang dipanaskan (Incropera dan Dewitt, 1996). Karakteristik proses HE mempunyai sifat nonlinier, sehingga memberikan variasi output temperatur, bahkan menimbulkan ketidakstabilan bila kondisi ini tidak dikendali dengan baik (Biyanto, dkk, 2004) (Norgaard, dkk, 2000). Oleh karena itu permasalahan dalam penelitian ini adalah bagaimana mengetahui kinerja kontrol PID yang dituning dengan JST (PID-JST) untuk mengendalikan temperatur
output HE. Untuk menyelesaikan permasalahan tersebut peneliti akan melakukan simulasi
Heat Exchanger
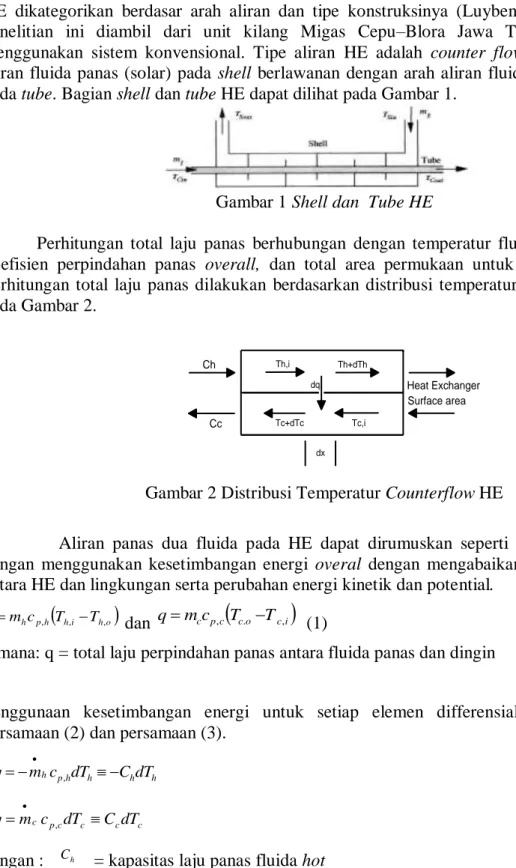
HE dikategorikan berdasar arah aliran dan tipe konstruksinya (Luyben, 1990). Plant pada penelitian ini diambil dari unit kilang Migas Cepu–Blora Jawa Tengah, yang masih menggunakan sistem konvensional. Tipe aliran HE adalah counter flow, yang berarti arah aliran fluida panas (solar) pada shell berlawanan dengan arah aliran fluida dingin (crude oil) pada tube. Bagian shell dan tube HE dapat dilihat pada Gambar 1.
Gambar 1 Shell dan Tube HE
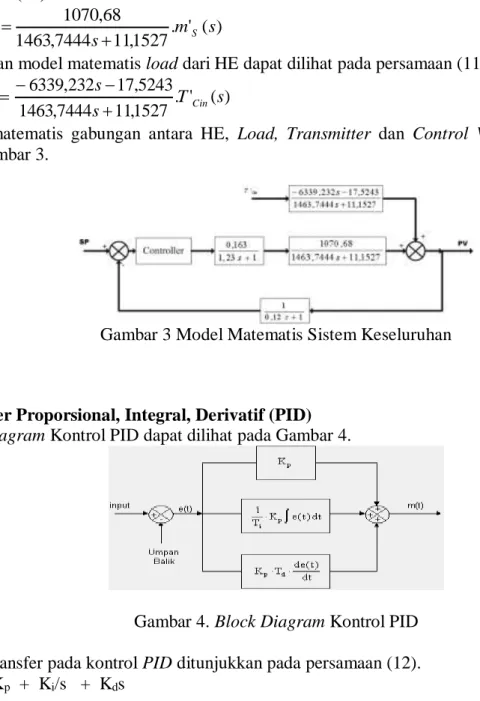
Perhitungan total laju panas berhubungan dengan temperatur fluida inlet dan outlet, koefisien perpindahan panas overall, dan total area permukaan untuk perpindahan panas. Perhitungan total laju panas dilakukan berdasarkan distribusi temperatur counterflow seperti pada Gambar 2. Heat Exchanger Surface area Ch Cc Th,i Tc+dTc Th+dTh Tc,i dq dx
Gambar 2 Distribusi Temperatur Counterflow HE
Aliran panas dua fluida pada HE dapat dirumuskan seperti pada persamaan (1) dengan menggunakan kesetimbangan energi overal dengan mengabaikan perpindahan panas antara HE dan lingkungan serta perubahan energi kinetik dan potential.
hi ho
h p hc T T m q , , , dan qmccp,c
Tc.oTc,i
(1)dimana: q = total laju perpindahan panas antara fluida panas dan dingin
Penggunaan kesetimbangan energi untuk setiap elemen differensial ditunjukkan pada persamaan (2) dan persamaan (3).
h h h h p hc dT CdT m dq , (2) c c c c p cc dT C dT m dq , (3)
dengan : Ch = kapasitas laju panas fluida hot c
h
m
= laju massa fluida hot c
m
= laju massa fluida cold
Th = temperatur fluida hot
Tc = temperatur fluida cold
Perpindahan panas melewati area permukaan dA dapat dituliskan seperti pada persamaan (4). TdA
U
dq
(4)
dimana T Th Tc adalah perbedaan temperatur lokal antara fluida panas dan dingin. Jika kedua ruas dideferensialkan, maka diperoleh persamaan (5).
T dTh dTcd (5)
Sehingga laju total perpindahan panas dirumuskan seperti pada persamaan (6).
2 1
1 2 / ln T T T T UA q (6) dengan: T1Th,iTc,i Th,iTc,o dan T2Th,oTc,oTh,oTc,iOleh karena itu, dapat ditentukan temperatur log mean seperti pada persamaan (7).
2 1
1 2 / ln T T T T Tlm (7)Berdasarkan persamaan (7), total laju perpindahan panas antara fluida dingin dan fluida panas dirumuskan seperti pada persamaan (8) (Incropera dan Dewitt, 1996).
lm T UA
q
(8)
Persamaan keseluruhan dari HE dengan kesetimbangan temperatur crude oil, dirumuskan pada persamaan (9). (9) dimana: ) .( 1 CpS TSin TSout A C CCp m A2 .
MCCpC MtCpt
A . . 2 1 3 S S C CCp m Cp m B1 . . .
MCCpC MtCpt
MSCpS MsCps
B . . 2 . . 2 1 2 ) ( ' . . . ) ( ' . . ) ( ' 3 2 2 1 3 2 1 s T s A A s B B s m s A A A s TCout S Cin Dengan memasukkan data steady state dari plant, diperoleh model matematis HE seperti pada persamaan (10). ) ( ' . 1527 , 11 7444 , 1463 68 , 1070 ) ( ' m s s s T Cout S (10)
Sedangkan model matematis load dari HE dapat dilihat pada persamaan (11). ) ( ' . 1527 , 11 7444 , 1463 5243 , 17 232 , 6339 ) ( ' T s s s s TCout Cin (11)
Model matematis gabungan antara HE, Load, Transmitter dan Control Valve dapat dilihat pada Gambar 3.
Gambar 3 Model Matematis Sistem Keseluruhan
Kontroler Proporsional, Integral, Derivatif (PID)
Block Diagram Kontrol PID dapat dilihat pada Gambar 4.
Gambar 4. Block Diagram Kontrol PID Fungsi transfer pada kontrol PID ditunjukkan pada persamaan (12).
Gc(s) = Kp + Ki/s + Kds (12) Dimana: Kp, Ki, dan Kd adalah gain-gain proportional, integral, dan derivatif.
Persamaan lain dari kontrol PID ditunjukkan pada persamaan (13).
Gc(s) = Kp ( 1 + 1/(Tis) + Tds) (13) Dimana: Ti = Kp/Ki dan Td = Kd/Kp
Ti dan Td merupakan konstanta waktu. Besarnya Time diskrit untuk kontrol PID digunakan persamaan (13).
u(k) = Kpe(k) + KiTs
n i i e 1 ) ( + (Kd/Ts) e(k) (13) Dimana:e(k) = error antara set point dengan output proses u(k) = sinyal kontrol
Ts = sampling period untuk controller
e(k) = e(k)-e(k-1)
Terdapat beberapa representasi fungsi transfer kontrol PID yaitu fungsi transfer kontrol PID yang dinyatakan dalam domain s, U(s) Kp Ki/sKds atau U(s) Kp
11/
Tis Tds
dan fungsi transfer PID kontroler yang dinyatakan dalam domain waktu (t)
dt de T edt T e K t U d i p 1 ) ( Dimana:U(t) = sinyal kontrol
e(t) = error (e(t) = Sp – y(t)).
Kp = gain,Kp = 100% / PB,(PB = Proportional Band) Td = waktu derivatif (derivative time), (det)
Ti = waktu integral (integral time), (det)
Jaringan Syaraf Tiruan (JST) Dengan Algoritma Belajar Levenbeg Marquard
Algoritma Levenberg Marquardt mempunyai langkah-langkah (Norgaard, dkk, 2000): Pertama, memilih vektor bobot awal w(0) dan harga awal λ(0), dimana w adalah bobot dan λ diberikan harga awal. Kedua, menentukan arah pencarian dengan menggunakan persamaan (14). ) ( )] ( [R w(i)(i)I f(i) G w(i) ... (14)
Dari persamaan (14) diperoleh nilai f dan dimasukan ke persamaan argmin N( , N)
w V w Z
w
Jika VN(w(i) + f(i) ,ZN) < VN (w(i) ,ZN) maka memenuhi w(i+1) = w(i) + f(i) sebagai iterasi baru, dan λ(i+1) = λ(i). Jika tidak, maka mencari nilai baru dari r sesuai dengan persamaan (15).
) ( ) , ( ) , ( ) , ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( i i i N i N N i i N N i N i f w L Z w V Z f w V Z w V r ... (15)
Jika r(i) > 0,75 maka λ(i) = λ(i) /2 dan jika r(i) < 0,25 maka λ(i) = 2λ(i)
Ketiga, jika kriteria tercapai maka perhitungan berhenti. Jika kriteria belum tercapai maka mengulangi langkah kedua.
METODE
Setelah mendapatkan model matematis plant secara keseluruhan (plant tanpa sistem pengendalian), maka dalam menyelesaikan permasalahan, peneliti akan merancang sistem seperti pada Gambar 5
Gambar 5 Struktur Dasar Kontrol PID dengan Tuning JST
Langkah-langkah yang diperlukan untuk membuat struktur dasar PID dengan Tuning JST adalah: (1) menentukan besarnya parameter-parameter kontrol PID, (2) melakukan simulasi
plant secara online, (3) merancang struktur JST, (4) melakukan validasi dan pelatihan JST, (4)
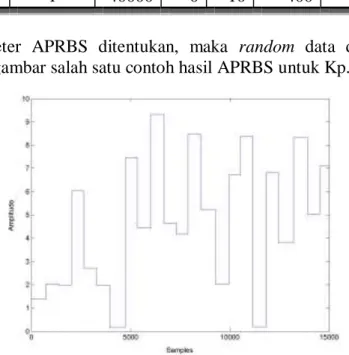
dan melakukan pengujian. Parameter-parameter kontrol PID (Kp, Ti, dan Td) dibangkitkan secara random. Metode Amplitudo Pseudo Random Binary Signal (APRBS) merupakan pembangkit sinyal untuk mendapatkan karakteristik kompleks dengan cara mengatur lebar pulsa sinyal dan amplitudo (Norgaard, dkk, 2000). Untuk menggunakan metode ini ada enam parameter awal yang harus ditentukan terlebih dahulu, yaitu panjang data (length), sampling data, nilai minimum data (X min), nilai maksimum data (X max), interval maksimum data (Max Interval), dan interval minimum data (Min Interval). Nilai parameter-parameter kontrol PID dan nilai parameter awal dapat dilihat pada Tabel 1.
Tabel 1 Parameter Awal APRBS untuk Random Konstanta Kp, Ti, dan Td Konst Sampling Lenght Xmin Xmax Intvlmin Intrvlmax
Kp 1 40000 0 10 400 600
Ti 1 40000 0 10 400 600
Td 1 40000 0 10 400 600
Setelah parameter APRBS ditentukan, maka random data dapat dilakukan. Pada Gambar 6 merupakan gambar salah satu contoh hasil APRBS untuk Kp.
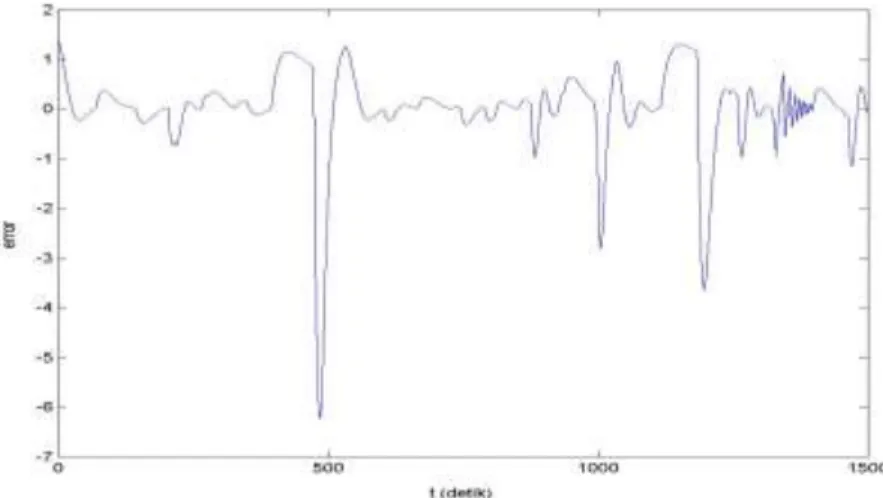
Untuk melakukan simulasi plant secara online, konstanta kontrol PID akan berubah sesuai dengan hasil APRBS sebelumnya. Dengan adanya perubahan konstanta ini, maka plant akan berada dalam kondisi dinamik sehingga muncul beberapa perubahan yaitu muncul error (e), perubahan variabel manipulasi (Mv), dan proses variabel (Pv). Nilai error dicatat untuk setiap waktu t seperti pada Gambar 7.
Gambar 7 Nilai Error Dicatat untuk Setiap Waktu t
Untuk merancang struktur JST diperlukan proses pelatihan terlebih dahulu. Jaringan dilatih menggunakan Metode Terawasi (supervised learning), yaitu metode jaringan yang diberikan serangkaian masukan secara pararel untuk menghasilkan output sesuai dengan target. Target pelatihan berupa gain P, I, dan D untuk beberapa variasi set point dan gangguan.
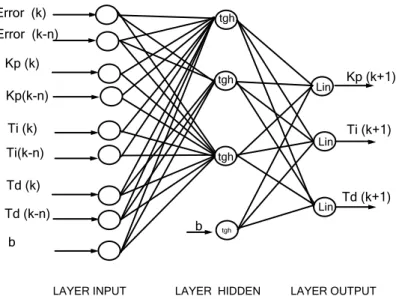
Input dari jaringan syaraf tiruan adalah error, Kp, Ti, dan Td. Output jaringan syaraf tiruan
adalah Kp, Ti, dan Td. Hasil pelatihan JST terhadap Kp target dapat dilihat pada Gambar 8, sedangkan struktur rancangan JST dapat dilihat pada Gambar 9.
b tgh tgh tgh Lin Lin Ti (k+1) Td (k+1) tgh Lin Kp (k+1) Error (k-n) b
LAYER INPUT LAYER HIDDEN LAYER OUTPUT
Kp(k-n) Ti(k-n) Td (k) Kp (k) Ti (k) Td (k-n) Error (k)
Gambar 9 Struktur Rangangan JST
Proses berikutnya adalah melakukan validasi model JST yang telah dibuat. Validasi dilakukan dengan memberikan pasangan input-output yang berbeda dengan data input-output yang dilatihkan tanpa ada perubahan bobot lagi. Proses validasi ini biasanya dilakukan setelah proses pelatihan dalam satu perangkat lunak dan diperoleh model mampu dengan baik memprediksi output sesuai target.
Pengujian
Setelah proses pelatihan dan validasi dilakukan, selanjutnya JST dintegrasikan dengan kontrol PID dan plant, dan disimulasikan kembali secara on-line. Untuk mengetahui efektifitas kinerja JST, maka diberikan perubahan set point dan disturbance. Pengujian dilakukan dengan kenaikan set point 10%, penurunan set point, dan uji plant dengan gangguan.
HASIL DAN PEMBAHASAN
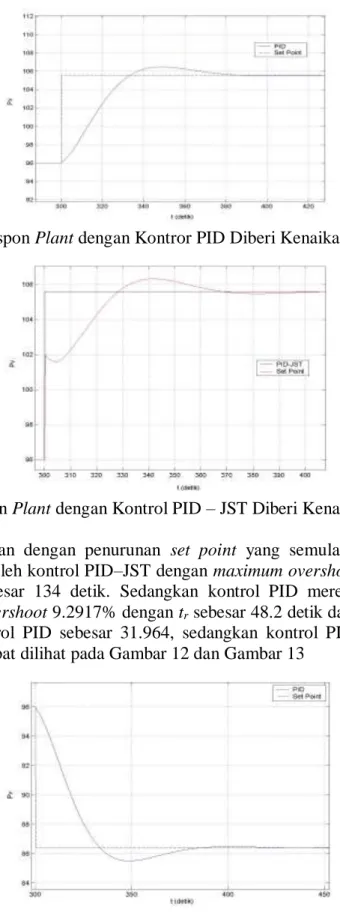
Berdasarkan hasil pengujian, maka hasil penambahan set point yang semula 960C menjadi 105.20C, direspon cukup cepat oleh kontrol PID – JST dengan maximum overshoot 12.9271%,
tr (rise time) sebesar 34.8 detik dan ts (settling time) sebesar 134 detik. Jika dibandingkan
dengan kontrol PID, kontrol PID merespon lebih lambat dan memiliki maximum overshoot 9.2917% dengan tr sebesar 48.2 detik dan ts sebesar 137.2 detik. Untuk nilai IAE
(IntegralAbsolte Error) kontrol PID sebesar 31.964, sedangkan kontrol PID – JST sebesar
Gambar 10 Respon Plant dengan Kontror PID Diberi Kenaikan Set Point 10%
Gambar 11 Respon Plant dengan Kontrol PID – JST Diberi Kenaikan Set Point 10% Dari hasil pengujian dengan penurunan set point yang semula 960C menjadi 86.80C, direspon cukup cepat oleh kontrol PID–JST dengan maximum overshoot 12.9271%, tr sebesar
34.8 detik dan ts sebesar 134 detik. Sedangkan kontrol PID merespon lebih lambat dan
memiliki maximum overshoot 9.2917% dengan tr sebesar 48.2 detik dan ts sebesar 137.2 detik.
Untuk nilai IAE kontrol PID sebesar 31.964, sedangkan kontrol PID–JST sebesar 20.915. Hasil selengkapnya dapat dilihat pada Gambar 12 dan Gambar 13
Gambar 13 Respon Plant dengan Kontrol PID – JST Diberi Penurunan Set Point 10% Pada hasil pengujian dengan gangguan, diperoleh bahwa temperatur dijaga sesuai dengan
set point kemudian ditambahkan gangguan berupa temperatur input crude oil sebesar ± 70C dari temperatur semula. Nilai temperatur input crude oil semula adalah 350C, sehingga nilai
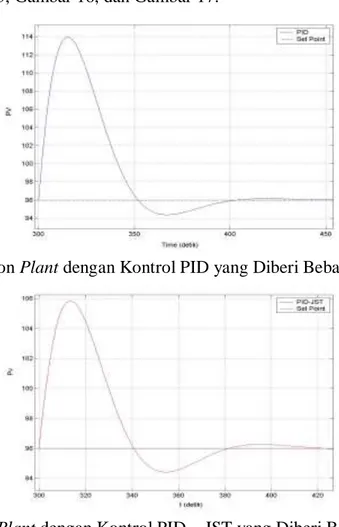
load-nya adalah sebesar 280C dan 420C. Respon masing-masing kontrol dapat dilihat pada Gambar 14, Gambar 15, Gambar 16, dan Gambar 17.
Gambar 14 Respon Plant dengan Kontrol PID yang Diberi Beban Temperatur 420C
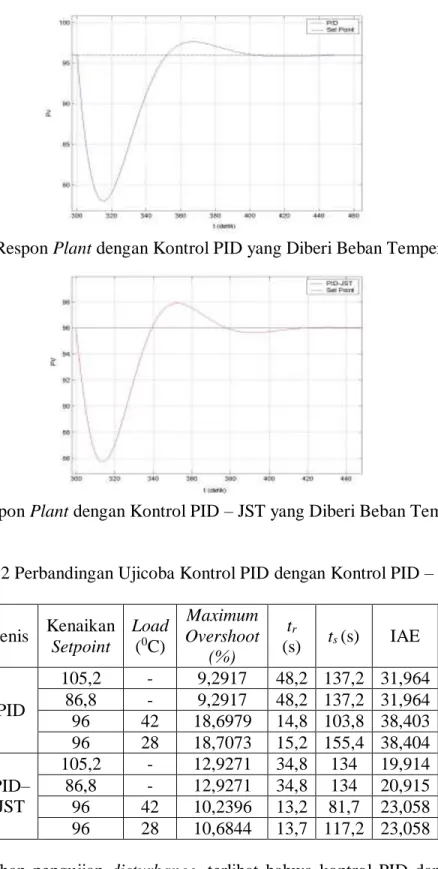
Gambar 16 Respon Plant dengan Kontrol PID yang Diberi Beban Temperatur 280C
Gambar 17 Respon Plant dengan Kontrol PID – JST yang Diberi Beban Temperatur 280C
Tabel 2 Perbandingan Ujicoba Kontrol PID dengan Kontrol PID – JST
Jenis Kenaikan Setpoint Load (0C) Maximum Overshoot (%) tr (s) ts (s) IAE PID 105,2 - 9,2917 48,2 137,2 31,964 86,8 - 9,2917 48,2 137,2 31,964 96 42 18,6979 14,8 103,8 38,403 96 28 18,7073 15,2 155,4 38,404 PID– JST 105,2 - 12,9271 34,8 134 19,914 86,8 - 12,9271 34,8 134 20,915 96 42 10,2396 13,2 81,7 23,058 96 28 10,6844 13,7 117,2 23,058
Pada keseluruhan pengujian disturbance, terlihat bahwa kontrol PID dan kontrol PID – JST mampu mengembalikan temperatur pada posisi set point semula. Pada penambahan beban sebesar 70C dari temperatur input awal crude oil sebesar 350C menjadi 420C, kontrol PID – JST merespon lebih cepat dengan maximum overshoot 10.2396%, tr sebesar 13.2 detik dan ts
sebesar 81.7 detik. Sedangkan kontrol PID merespon lebih lambat dengan maximum overshoot 18.6979%, tr sebesar 14.8 detik dan ts sebesar 103.8 detik. Untuk nilai IAE kontrol PID
sebesar 38.403, sedangkan kontrol PID – JST sebesar 23.058.
Pada pengurangan beban sebesar 70C dari temperatur input awal crude oil sebesar 350C menjadi 280C, kontrol PID – JST merespon lebih cepat dengan maximum overshoot 10.6844%, tr sebesar 13.7 detik dan ts sebesar 117.2 detik. Sedangkan kontrol PID merespon
lebih lambat dengan maximum overshoot 18.7073%, tr sebesar 15.2 detik dan ts sebesar 155.4
detik. Untuk nilai IAE kontrol PID sebesar 38.403, sedangkan kontrol PID – JST sebesar 23.058. Hasil selengkapnya dapat dilihat pada Tabel 2
Pada Tabel 2 terlihat bahwa kontrol PID – JST memiliki rise time dan settling time yang lebih baik dari pada PID. Harga IAE kontrolr PID–JST lebih kecil daripada kontrol PID. Oleh karena itu, kinerja kontrol PID – JST lebih bagus dibandingkan dengan kontrol PID.
SIMPULAN
Dari analasa diatas dapat disimpulkan bahwa :
Tuning PID menggunakan JST dapat dilakukan pada proses penukar panas dengan mudah, yaitu dengan melatihkan parameter tuning tehadap error yang terjadi.
Efektifitas JST dalam mentuning kontroler PID membuat performansi sistem pengendalian PID-JST jauh lebih baik jika dibandingkan dengan PID konvensional, ditinjau dari beberapa aspek yaitu nilai IAE yang kecil serta rising time (tr) dan settling time (ts) yang cepat
DAFTAR PUSTAKA
[1] Biyanto, T. R., Handogo, R. and Suhartanto, T. 2004. Controlling of a Binary Distillation
Column using Neural Network - Internal Model Control (NN-IMC). In Post Graduate
Seminar IV, Sepuluh Nopember Institute of Technology Surabaya, Surabaya, 24-25 August 2004.
[2] Biyanto, T. R. 2005. Internal Model Control – Neural Network Gain Scheduling. Journal
Electrical Engineering, 5(2).
[3] Fausett,L. 1994. Fundamental of neural networks: Architectures, algorithms, and
applications. New Jersey: Prentice Hall.
[4] Incropera and Dewitt. 1996. Fundamental Of Heat and Mass Transfer 4th, Washington: John Wiley & Sons.
[5] Luyben, W.L. 1990. Process Modeling, Simulation, and Control for Chemical Engineers. Singapore: McGraw-Hill Inc.
[6] Norgaard, M,..Ravn, O., Poulsen, N.K. and Hansen L.K. 2000. Neural Network for