Abstrak –- Banyaknya pasien yang mengalami
kelumpuhan, misal, akibat stroke memerlukan rehabilitasi kelumpuhan anggota geraknya. Functional Electrical
Stimulation (FES) dapat secara efektif dalam membantu
restorasi kelumpuhan fungsi motorik. Untuk sistem FES terinduksi gait (gaya berjalan), memerlukan sistem sensor untuk memonitor lower limb joint angles sebagai feedback. Pada paper ini kami mengusulkan penggunaan sensor akselerometer dan giroskop untuk mengukur lower limb
joint angles, yaitu sudut sendi heap, knee dan ankle.
Pengunaan sensor berteknologi MEMSs dengan ukuran yang kecil bertujuan agar sistem sensor mudah dipakai dan nyaman bagi pasien. Dijabarkan bagaimana penentuan persamaan lower limb joint angles berdasar vektor akselerasi akselerometer yang terpasang pada segmen tubuh, paha, betis dan telapak kaki, untuk mengukur sudut tilt tiap segmen. Pengujian dilakukan dengan menggunakan model kaki dari seorang subyek dengan skala 1:1 didapat hasil yang linier dengan nilai RMSE sudut heap = 0,96o, RMSE sudut knee = 1,25o dan RMSE sudut ankle = 1,81o. Dengan metode yang diusulkan peletakan posisi sensor lebih mudah dilakukan. Berdasar hasil penelitian ini, kedepan akan dilanjutkan penelitian tentang penentuan lower limb joint angles pada subyek yang berjalan dengan normal gait.
Kata Kunci— lower limb joint angles, akselerometer,
sudut tilt, normal gait, FES.
I. PENDAHULUAN
unctional electrical stimulation (FES) telah banyak
diteliti untuk digunakan dalam restorasi kemampuan motorik pasien yang mengalami kerusakan susunan syaraf pusat yang diakibatkan oleh spinal cord injury (SCI) maupun stroke. Untuk tungkai bawah (lower
limb), FES dapat memperbaiki gaya berjalan (gait)
dengan mengontrol fase berayun gait dan mencegah jatuhnya kaki secara tiba-tiba pada lantai (foot drop) [1]. Untuk merealisasikan sistem closed-loop FES sebagai fungsi dari gait, salah satu metode yang digunakan adalah memonitor secara kontinyu besar sudut persendian lower limb untuk digunakan sebagai
feedback. Diperlukan sistem pengukuran lower limb joint angles yang mudah dipakai, tidak membatasi gerak
pasien yang berakibat negatif pada psikologis pasien sehingga menghambat proses rehabilitasi.
Telah banyak penelitian mengenai pengukuran lower
limb joint angles, sebagian besar menggunakan resistor
variabel [5][6] sebagai sensor posisi sudut (goniometer) yang terpasang pada engsel pelana kaki (leg harness). Struktur goniometer ini dapat menggangu kebebasan gerak pasien dan konstruksi mekaniknya rawan terhadap kerusakan karena sering digerakkan. Penggunaan tilt
sensor, menurut forum analog dialoque, Analog
Devices, Inc. 1995, disebutkan: penggunaan liquid tilt
sensor untuk mendeteksi posisi sudut kaki akan terjadi
masalah sloshing cairan di dalam sensor, sehingga hanya kecepatan berjalan lambat saja yang bisa diukur dengan baik. Sedangkan penggunaan ball-bearing
switches tilt sensor pada medan perbukitan atau naik
tangga akan menghasilkan data yang acak. Penggunaan akselerometer dan giroskop dalam pengukuran sudut sendi kaki dengan berbagai metode telah dilakukan [2][3][4], namun belum mencakup keseluruhan sendi pada kaki.
Pada penelitian ini kami mengusulkan sistem pengukuran lower limb joint angles berbasis sensor inersia yaitu akselerometer dan giroskop. Sebagai tahap pertama dari penelitian akan dicari persamaan untuk menentukan sudut sendi pinggang (heap), lutut (knee) dan sendi telapak kaki (ankle) berdasar respon akslerometer dalam mengukur kemirigan (tilt) segmen tubuh, paha, betis dan telapak kaki terhadap vektor gravitasi.
II. PENGUKURAN DAN SENSOR
A. Pengukuran Lower Limb Joint Angles
Sudut heap didefinisikan sebagai sudut antara antara
pelvis (pinggul) dan femur (paha), sudut lutut adalah
sudut antara femur dan tibia (betis). Sudut engkel kaki didefinisikan sebagai sudut antara tibia dan garis mendatar pada telapak kaki. Meski sudut ini biasanya sekitar 90°, namun didefinisikan sebagai 0°.
Secara umum, gerakan flexion (menekuk angota gerak) adalah gerakan sudut ke arah nilai positif dan gerakan extension (memanjangkan angota gerak) adalah gerakan sudut ke arah nilai negatif. Sudut 0° untuk semua sendi didefinisikan sebagai sudut saat tubuh posisi berdiri tegak [6].
Benedictus Indrajaya*, Rachmad Setiawan, Achmad Arifin Bidang Keahlian Teknik Elektronika, Program Pascasarjana Teknik Elektro
Institut Teknologi Sepuluh Nopember Surabaya *Email : [email protected] / [email protected]
Penentuan Lower Limb Joint Angles Berdasar
Respon Akselerometer dalam Pengembangan
Wearable Sensor untuk FES
B. Pemilihan Sensor
Sensor yang digunakan adalah akselerometer 3-sumbu MMA7361L dengan skala ±1.5 g atau ±6 g buatan Freescale Semiconductor, Inc. Untuk mengukur gerakan kaki manusia yang relatif lambat, maka akan dipilih skala ±1.5 g (1 g = 9.81 m/detik2).
Digunakan pula sensor giroskop 2-axis LPY510AL dengan skala ±400°/s buatan STMicroelectronics. Pada analisa respon statis sudut sendi kaki, giroskop digunakan sebagai penentu orientasi sudut tilt.
Sensor akselerometer dan giroskop yang digunakan menggunakan teknologi micro-electro-mechanical
system (MEMS) dengan ukuran yang kecil, bertujuan
agar sistem sensor mudah dipakai dan nyaman bagi pasien. Kedua sensor dijadikan satu PCB menjadi sensor inersia (Inertial Measurement Unit / IMU) dengan arah vektor sumbu seperti pada Gambar 1. Dibutuhkan empat unit sensor inersia yang ditempatkan pada segmen body, paha, betis dan telapak kaki.
C. Penempatan Sensor
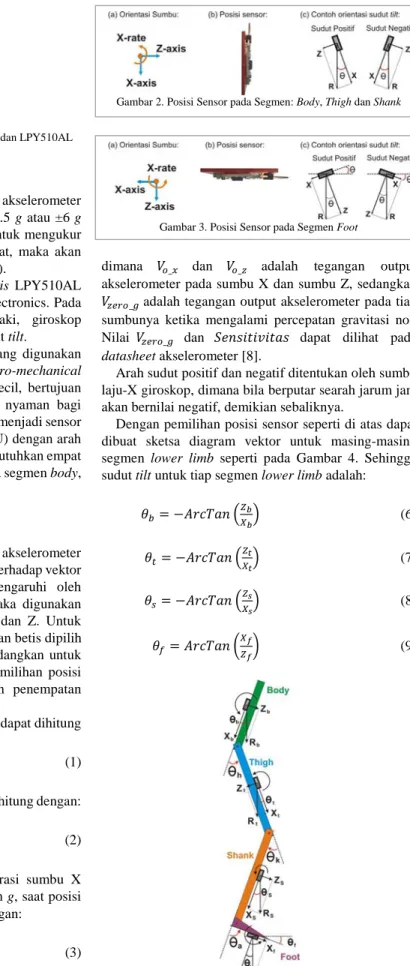
Untuk mendapatkan respon linier akselerometer dalam mengukur sudut tilt suatu segmen terhadap vektor gravitasi, hasil pengukuran tidak dipengaruhi oleh variasi suhu ruangan dan catu daya, maka digunakan dua axis akselerometer yaitu sumbu X dan Z. Untuk mengukur sudut tilt segmen body, paha dan betis dipilih posisi sensor seperti pada Gambar 2, sedangkan untuk segmen foot seperti pada Gambar 3. Pemilihan posisi sensor ini berguna untuk memudahkan penempatan sensor pada tubuh pasien.
Sudut tilt segmen body, paha dan betis dapat dihitung dengan:
ߠǡ௧ǡ௦ൌ െܣݎܿܶܽ݊ ቀೌೌቁ (1)
Sedangkan sudut tilt segmen foot dapat dihitung dengan: ߠൌ ܣݎܿܶܽ݊ ቀೌೌቁ (2)
dimana ܺ dan ܼ adalah vektor akselerasi sumbu X dan sumbu Z akselerometer dalam satuan g, saat posisi sudut tilt sensor sebesar ߠo , dihitung dengan: ܺൌௌ௦௧௩௧௦̴ೣିೝ̴ (3)
ܼൌௌ௦௧௩௧௦̴ିೝ̴ (4)
dimana ̴ܸ௫ dan ̴ܸ௭ adalah tegangan output akselerometer pada sumbu X dan sumbu Z, sedangkan ܸ௭̴ adalah tegangan output akselerometer pada tiap sumbunya ketika mengalami percepatan gravitasi nol. Nilai ܸ௭̴ dan ܵ݁݊ݏ݅ݐ݅ݒ݅ݐܽݏ dapat dilihat pada datasheet akselerometer [8]. Arah sudut positif dan negatif ditentukan oleh sumbu laju-X giroskop, dimana bila berputar searah jarum jam akan bernilai negatif, demikian sebaliknya. Dengan pemilihan posisi sensor seperti di atas dapat dibuat sketsa diagram vektor untuk masing-masing segmen lower limb seperti pada Gambar 4. Sehingga sudut tilt untuk tiap segmen lower limb adalah: ߠൌ െܣݎܿܶܽ݊ ቀ್್ቁ (6)
ߠ௧ൌ െܣݎܿܶܽ݊ ቀቁ (7)
ߠ௦ൌ െܣݎܿܶܽ݊ ቀೞೞቁ (8)
ߠൌ ܣݎܿܶܽ݊ ൬൰ (9)
Gambar 1. Inertial Measurement Unit: MMA7361L dan LPY510AL
Gambar 2. Posisi Sensor pada Segmen: Body, Thigh dan Shank
Gambar 3. Posisi Sensor pada Segmen Foot
Gambar 4. Sketsa Diagram Vektor Akselerasi Akselerometer pada Tiap Segmen Lower Limb
dimana ߠ, ߠ௧, ߠ௦ dan ߠ adalah sudut tilt segmen: body,
thigh, shank dan foot tehadap vector gravitasi, semua
dalam satuan derajad. Sedangkan ܺ, ܼ, ܺ௧, ܼ௧, ܺ௦, ܼ௦,
ܺ dan ܼ adalah vektor akselerasi sumbu X dan Z
untuk masing-masing akselerometer yang terpasang pada segmen body, thigh, shank dan foot, semua dalam satuan g.
III. PENENTUAN LOWER LIMB JOINT ANGLES
Dari sketsa diagram vektor akselerasi akselerometer pada Gambar 4 dapat disusun persamaan untuk penentuan lower limb joint angles sebagai berikut:
ߠൌ ߠ௧െ ߠ (10)
ߠൌ ߠ௧െ ߠ௦ (11)
ߠൌ െߠ௦െ ߠെ Ͷͷ (12)
dimana ߠ adalah sudut sendi heap, ߠ= sudut sendi
knee dan ߠ= sudut sendi ankle, semua dalam satuan derajad. Sedangkan ߠ, ߠ௧, ߠ௦dan ߠ adalah sudut tilt segmen: body, thigh, shank dan foot tehadap vektor gravitasi.
Persamaan (10) sampai dengan Persamaan (12) didapat dari sketsa diagram vektor tiap akselerometer pada lower limb (Gambar 4) dengan bentuk permukaan kontur segmen body, thigh, shank dan foot yang lurus. Bila sensor-sensor dipasang pada tubuh manusia dengan kontur permukaan segmen yang tidak lurus dan rata, maka persamaan perlu disesuaikan. Penyesuaian dilakukan dengan menghitung simpangan tiap sudut sendi terhadap posisi zero (0o), yaitu posisi sudut tiap sendi subyek saat berdiri tegak. Sehingga Persamaan (10) sampai dengan Persamaan (12) disesuaikan menjadi:
οߠൌ ሺߠ௧െ ߠሻ െ οߠ (13)
οߠൌ ሺߠ௧െ ߠ௦ሻ െ οߠ (14)
οߠൌ ሺെߠ௦െ ߠെ Ͷͷሻ െ οߠ (15)
Notasi ‘ο’ digunakan untuk menyatakan bahwa yang diukur adalah simpangan dari posisi zero, dimana οߠ,
οߠ, dan οߠ adalah besar sudut sendi pada heap, knee
dan ankle. Sedangkan οߠ, οߠ, dan οߠ adalah besar sudut sendi pada heap, knee dan ankle pada saat posisi zero, dihitung dengan:
οߠൌ ߠ௧െ ߠ (16)
οߠൌ ߠ௧െ ߠ௦ (17)
οߠൌ െߠ௦െ ߠെ Ͷͷ (18)
dimana ߠ, ߠ௧, ߠ௦ dan ߠ adalah sudut tilt segmen
body, thigh, shank dan foot saat berdiri tegak (posisi zero / 0o).
IV. PENGUJIAN DENGAN MODEL STATIS
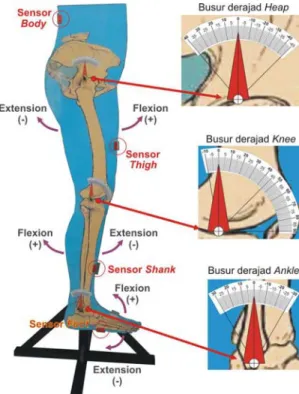
Untuk menguji Persamaan (13) sampai dengan Persamaan (15) dibuat sebuah model kaki statis yang diambil dari seorang subyek dengan skala 1:1 seperti pada Gambar 5. Pada tiap sendi dipasang busur derajad untuk mengukur besar sudut tiap sendi dengan jangkah pengukuran berdasar range gerakan sudut sendi pada manusia yang berjalan dengan normal gait.
Range sudut sendi heap untuk normal gait berkisar
antara -10o sampai +40o, sedangkan sudut sendi knee berkisar antara 0o sampai +70o dan range untuk sudut sendi ankle berkisar antara -20o sampai +40o [6].
Untuk menguji persamaan sudut sendi heap, Persamaan (13), sudut heap digerakan mulai dari -40o sampai +40o sedangkan sudut knee dan ankle dibuat tetap, dalam hal ini sendi knee dan ankle dikunci agar tidak berubah (pada posisi zero) ketika sudut heap digerakan. Hasil vektor output akselerometer dan perhitungan sudut heap seperti pada Gambar 6.
Pengujian persamaan sudut sendi knee, yaitu Persamaan (14), dilakukan dengan menggerakan sudut
knee mulai dari -10o sampai +75o, untuk sudut heap dan
ankle dibuat tetap. Vektor output akselerometer dan
perhitungan sudut heap seperti pada Gambar 7.
Sedangkan untuk menguji persamaan sudut sendi
ankle, Persamaan (15), sudut ankle digerakan mulai dari
-30o sampai +30o sedangkan sudut heap dan knee dibuat tetap. Hasil vektor output akselerometer dan perhitungan sudut ankle seperti pada Gambar 8.
Gambar 5. Model Statis Lower Limb untuk Pengujian Persamaan
V. HASIL EKSPERIMEN DAN DISKUSI
Pada Gambar 6 terlihat bahwa saat sudut heap digerakan dari sudut -40o sampai dengan +40o, didapat hasil perhitungan sudut heap (sumbu tegak grafik Perhitungan Sudut Sendi) dengan Persamaan (13), linier terhadap hasil pembacaan busur derajad heap (sumbu datar grafik). Hasil perhitungan sudut knee dengan Persamaan (14) dan perhitungan sudut ankle dengan Persamaan (15) cenderung bernilai sekitar 0o, hal ini sesuai dengan kondisi bahwa sendi pada knee dan ankle dibuat tetap pada nilai zero-nya.
Saat sudut knee digerakan dari -10o sampai dengan +70o pada Gambar 7 terlihat bahwa hasil perhitungan sudut knee dengan Persamaan (14), linier terhadap hasil pembacaan busur derajad knee. Sedangkan hasil perhitungan sudut heap dengan Persamaan (13) dan perhitungan sudut ankle dengan Persamaan (15) bernilai sekitar 0o, sesuai dengan kondisi bahwa sendi pada heap dan ankle dibuat tetap pada nilai zero-nya.
Demikian pula saat sudut ankle digerakan dari -10o sampai dengan +70o pada Gambar 8 terlihat bahwa hasil perhitungan dengan Persamaan (15), sudut ankle linier terhadap hasil pembacaan busur derajad ankle. Hasil perhitungan sudut heap dengan Persamaan (13) dan perhitungan sudut knee dengan Persamaan (14) bernilai sekitar 0o.
Pada pengujian persamaan sudut sendi heap, didapat nilai root mean square error (RMSE) sudut sendi heap terhadap pembacaan busur derajad heap = 1,11o. RMSE sudut sendi knee = 2,14o dan RMSE sudut sendi ankle = 3,56o.
Untuk pengujian persamaan sudut sendi knee didapat nilai RMSE sudut sendi knee = 0,67o, RMSE sudut sendi
heap = 0,79o dan RMSE sudut sendi ankle = 1,46o. Pengujian persamaan sudut sendi ankle didapat nilai RMSE sudut sendi ankle = 1,09o, RMSE sudut sendi
heap = 0,83o dan RMSE sudut sendi knee = 0,41o. Dari keseluruhan eksperimen didapat rata-rata nilai RMSE untuk sudut heap = 0,96o, RMSE sudut knee = 1,25o dan RMSE untuk sudut ankle = 1,81o.
Terlihat bahwa hasil pengukuran lower limb joint
angles tidak terpengaruh oleh akurasi peletakan sensor
pada posisi tertentu pada lower limb pasien, sehingga memudahkan pemasangan sistem sensor oleh terapis pada tubuh pasien.
Dari hasil RMSE pada tiap uji persamaan sudut sendi di atas, cukup memberikan prospek untuk penelitian lanjutan tentang penentuan besar lower limb joint angles pada kondisi dinamik, jika sensor terpasang pada pasien yang bergerak dengan gaya berjalan normal. Respon dinamik dari sensor yang terpasang pada segmen body,
thigh, shank dan foot untuk menentukan besar joint angles dapat diturunkan dari Persamaan (13) sampai
dengan Persamaan (15).
Banyak penelitian menyebutkan penggunaan akselerometer sebagai pengukur sudut tilt suatu segmen pada kondisi dinamik/begerak, akan terganggu oleh percepatan translasi segmen tersebut [7]. Penggunaan akselerometer untuk mengukur sudut tilt segmen body,
thigh, shank dan foot saat subyek berjalan akan
terganggu pula oleh getaran yang ditimbulkan oleh benturan kaki dan lantai [2].
Sebagai alternatif pengukur sudut tilt suatu segmen pada kondisi dinamik/begerak dapat digunakan sensor giroskop karena output sensor ini tidak terpengaruh oleh percepatan translasi dan getaran. Dengan melakukan integral pada kecepatan sudut yang dihasilkan giroskop akan didapat posisi sudut tilt dari segmen yang diukur [3][4][5][7]. Namun karena sifat alami giroskop pasti terdapat DC bias error, maka jika dilakukan integral terhadap terhadap waktu akan terjadi akumulasi bias
error yang mengakibatkan hasil pengukuran posisi
sudut giroskop cenderung melayang (drift) dari waktu ke waktu.
Kedepan penelitian akan dilanjutkan untuk menentukan besar lower limb joint angles pada kondisi subyek berjalan normal. Besar sudut tilt segmen body,
thigh, shank dan foot akan diestimasi dengan Kalman Filter untuk menggabungkan (fusi) output dari
akselerometer dan giroskop (sensor inersia) yang terpasang pada tiap segmen. Besar lower limb joint
angles akan dihitung menggunakan Persamaan (13)
sampai Persamaan (15) dengan input hasil estimasi
Kalman Filter untuk sudut tilt segmen body, thigh, shank dan foot.
Gambar 8. Output Vektor Akselero dan Perhitungan Sudut Sendi Saat Sudut Angkel Digerakan dari Sudut -30o
sampai dengan +30o
Gambar 7. Output Vektor Akselero dan Perhitungan Sudut Sendi Saat Sudut Knee Digerakan dari Sudut -10o
sampai dengan +75o
Gambar 6. Output Vektor Akselero dan Perhitungan Sudut Sendi Saat Sudut Heap Digerakan dari Sudut -40o
VI. KESIMPULAN
Penentuan besar sudut persendian untuk tungkai bawah dengan menggunakan sensor inersia (akselerometer dan giroskop) dapat diturunkan berdasar vektor akselerasi sensor-sensor akselerometer yang terpasang pada tiap segmen tungkai bawah tubuh manusia.
Pada pengujian persamaan sudut sendi heap, Persamaan (13), didapat rata-rata nilai RMSE untuk sudut heap 0,96o. Untuk pengujian persamaan sudut sendi knee, Persamaan (14), didapat RMSE sudut knee 1,25o. Sedangdan pengujian persamaan sudut sendi
ankle, Persamaan (15), didapat RMSE sudut ankle
1,81o. Dari hasil evaluasi RMSE tersebut memberikan prospek untuk melanjutkan penelitian tentang penentuan besar lower limb joint angles untuk respon dinamik.
Hasil pengukuran lower limb joint angles dengan metode yang diusulkan tidak terpengaruh oleh akurasi peletakan sensor pada posisi tertentu pada lower limb pasien, sehingga memudahkan pemasangan sistem sensor oleh terapis pada tubuh pasien.
Kedepan penelitian akan dilanjutkan untuk menentukan besar lower limb joint angles pada kondisi subyek berjalan normal. Kalman Filter digunakan untuk estimasi untuk sudut tilt segmen body, thigh, shank dan
foot.
Hasil estimasi Kalman Filter digunakan sebagai input Persamaan (13) sampai dengan Persamaan (15) akan didapat nilai lower limb joint angles.
DAFTAR PUSTAKA
[1] “Materi Mata Kuliah Pengenalan Bidang Riset”, A. Arifin, Pascasarjana Teknik Elektro, Institut Teknologi Sepuluh Nopember Surabaya, 2010.
[2] H. Saito, T. Watanabe, A. Arifin, "Ankle and Knee Joint Angle Measurements during Gait with Wearable Sensor System for Rehabilitation“, O. Dössel and (Eds.): WC 2009, IFMBE Proceedings 25/IX, pp. 506–509
[3] SJ. Morris Bamberg, dkk., "Gait Analysis Using a Shoe-Integrated Wireless Sensor System", IEEE Ttransaction on
Information Technology in Biomedicine, VOL. 12, NO. 4, JULY
2008
[4] H. Lau, K. Tong, "The reliability of using accelerometer and gyroscope for gait event identification on persons with dropped foot", Gait & Posture 27 (2008) 248–257, ©2007 Elsevier B.V. [5] "Gait Analysis, Leg Harness and BodyLAB“, Robotic Systems
Ltd, 2007. Availabel: http://www.robotic-systems.co.uk [6] J. Perry, "Gait Analysis Normal and Pathological Function",
SLACK Incorporated, NJ, 1992
[7] YS. Suh, “Attitude Estimation Using Low Cost Accelerometer and Gyroscope”, in Proc. IEEE, 2003, Korea-Russia International Symposium, pp 423-427.
[8] "MMA7361L ±1.5g, ±6g Three Axis Low-g Micromachined Accelerometer" Data sheet. Freescale Semiconductor, Inc., 2008.