TUGAS AKHIR
STUDI KASUS UNBALANCE PADA POMPA
SENTRIFUGAL BERDASARKAN SINYAL GETARAN
Diajukan Guna Melengkapi Sebagian Syarat Dalam Mencapai Gelar Sarjana Strata Satu (S1)
Disusun Oleh :
Nama : Nur Kholis Setiawan NIM : 41305120021 Fakultas : Teknik Industri
Jurusan : Teknik Mesin
PROGRAM STUDI TEKNIK MESIN
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCU BUANA
JAKARTA
LEMBAR PERNYATAAN
Yang bertanda tangan di bawah ini,
N a m a : Nur Kholis Setiawan
NIM : 41305120021
Jurusan : Teknik Mesin
Fakultas : Teknik Industri
Judul Skripsi : Studi Kasus Unbalance pada Pompa
Sentrifugal Berdasarkan Sinyal Getaran
Dengan ini menyatakan bahwa hasil penulisan Skripsi yang telah saya buat
ini merupakan hasil karya sendiri dan benar keasliannya. Apabila ternyata di
kemudian hari penulisan skripsi ini merupakan hasil plagiat atau penjiplakan
terhadap karya orang lain, maka saya bersedia mempertanggungjawabkan
sekaligus bersedia menerima sanksi berdasarkan aturan tata tertib di Universitas
Mercu Buana.
Demikian pernyataan ini saya buat dalam keadaan sadar dan tidak
dipaksakan.
Penulis,
LEMBAR PENGESAHAN
STUDI KASUS UNBALANCE PADA POMPA
SENTRIFUGAL BERDASARKAN SINYAL GETARAN
Disusun Oleh :
Nama : Nur Kholis Setiawan NIM : 41305120021 Fakultas : Teknik Industri
Jurusan : Teknik Mesin
Mengetahui,
Pembimbing Koordinator TA / KaProdi
ABSTRAK
Studi kasus unbalance pada pompa sentrifugal berdasarkan sinyal getaran
telah dianalisa oleh penulis dengan obyek hasil getaran yang tinggi sekali yaitu
7,918 mm/s yang bisa mengakibatkan resonansi pada semua bagian antara lain
bantalan, poros, impeller dan lain-lain.
Penulis menganalisa permasalahan tersebut dengan menggunakan software
Machinery Health Manager dan dengan data kolektor CSi 2120A yang berbasis
analisa Fast Fourrier Transform.
Dari studi diatas didapat hasil pompa yang sebelumnya beroperasi dengan
vibrasi tinggi yaitu 7,918 mm/s yang disebabkan oleh unbalance menjadi 2,018
mm/s setelah dilakukan perbaikan dengan penggantian poros dan impeller.
KATA PENGANTAR
Segala puji dan syukur penulis panjatkan kehadirat Allah SWT. Karena
dengan rahmat-Nyalah penulis dapat menyelesaikan Tugas Akhir ini .
Tugas Akhir ini disusun sebagai salah satu syarat kelulusan untuk
mendapatkan gelar sarjana pada Jurusan Teknik Mesin Universitas Mercu Buana
Jakarta. Tugas Akhir ini dilakukan dengan tujuan mengamati, mengenal dan
menyimpulkan suatu proses atau kejadian dan membandingkan dengan teori yang
ada.
Berbagai kesulitan dan rintangan yang penulis hadapi Alhamdulillah
dengan keinginan yang kuat dan berkat bantuan berbagai pihak baik moril
maupun materiil maka akhirnya penulisan dapat diselesaikan .
Pada kesempatan ini penulis ingin menyampaikan ucapan terima kasih yang
sebesar – besarnya kepada :
1. Bapak Dr. H. Abdul Hamid M.Eng, selaku pembimbing yang telah bersedia
memberikan bimbingan dan mendiskusikan masalah yang dibahas dalam
tugas akhir ini .
2. Bapak Ir. Ruli Nutranta M. Eng, sebagai Kaprodi Teknik Mesin yang telah
memberikan dorongan dalam penyelesaian tugas akhir ini .
3. Staff Pengajar Jurusan Teknik Mesin yang telah menyumbangkan ilmu
pengetahuan bagi kemajuan penulis.
4. Bapak dan Ibu tercinta yang telah memberikan begitu banyak dorongan
5. Rekan – rekan sekerja yang telah memberikan kesempatan dan dukungan
sehingga penelitian Tugas Akhir bisa selesai.
6. Serta rekan – rekan Teknik Mesin untuk semua dukungan dan bantuan yang
tidak dapat disebutkan disini .
Semoga Allah SWT membalas segala kebaikan yang telah mereka berikan.
.Akhinya dengan segala kerendahan hati, penulis berharap semoga tulisan ini
dapat bermanfaat.
Jakarta , September 2007
DAFTAR ISI
Halaman Judul ………...……..………. i
Halaman Pernyataan ………...……... ii
Halaman Pengesahan ………...… iii
Abstraksi ………....……..………... iv
Kata Pengantar ………....………...……… ….. v
Daftar Isi ………...…….. vii
Daftar Tabel ……….………. x
Daftar Gambar ………...……..…...… xi
Daftar Simbol ………...……….……….… xiii
BAB I PENDAHULUAN 1.1 Latar Belakang ………..……... 1 1.2 Perumusan Masalah ……….………... 2 1.3 Pembatasan Masalah…….………….………...…… 2 1.4 Tujuan Penelitian.……… 3 1.5 Metodologi Penelitian.………...………..…… 3 1.6 Sistematika Penulisan.……….. 3
BAB II TINJAUAN PUSTAKA 2.1 Teori Getaran... 5
2.1.1 Fungsi Harmonik... 6
2.1.2 Analisa Harmonik... 7
2.1.4 Pengukuran Sinyal Getaran... 14
2.1.4.1 Langkah-langkah Pengukuran Sinyal Getaran... 16
2.1.4.2 Analisa Vibrasi... 19
2.2 Pompa Sentrifugal... 20
2.2.1 Ciri-ciri Pompa Sentrifugal... 19
2.2.2 Prinsip Kerja... 21
2.2.3 Bagian-bagian Pompa Sentrifugal... 21
2.2.4 Masalah pada Pompa Sentrifugal…………...……… 24
BAB III PENGUMPULAN DAN PENGOLAHAN DATA 3.1 Diagram Alir Pengukuran Getaran... 25
3.2 Pengambilan Data Getaran... 26
BAB IV PEMBAHASAN 4.1 Analisa Trending Data... 42
4.2 Analisa Spektrum... 43
4.3 Analisa Waveform... 45
4.4 Rekomendasi Perbaikan... 47
4.5 Data Setelah Perbaikan... 48
4.5.1 Trending Data... 48
4.5.2 Spektrum... 48
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan... 49
Daftar Pustaka... 51
DAFTAR TABEL
Halaman
Tabel 2.1 Masalah pada Pompa dan Penyebabnya... 24
DAFTAR GAMBAR
Halaman
1. Gambar 2.1 Fungsi Periodik... 5
2. Gambar 2.2 Fungsi Sebarang... 7
3. Gambar 2.3 Sinyal Sinus x1 dan x2………...….. 10
4. Gambar 2.4 Penjumlahan dari Dua Sinyal Sinus x1 dan x2… …….……. 10
5. Gambar 2.5 FFT dari Penjumlahan Dua Sinyal Sinus x1 dan x2..……... 11
6. Gambar 2.6 Sensor Simpangan Getar... 11
7. Gambar 2.7 Sensor Kecepatan Getaran... 12
8. Gambar 2.8 Sensor Percepatan Getaran... 13
9. Gambar 2.9 Alat-alat Pengolah Sinyal Getaran... 15
10. Gambar 2.10 Spektrum Frekuensi untuk Diagnosis Kerusakan... 16
11. Gambar 2.11 Lokasi Penempatan Sensor... 17
12. Gambar 2.12 Spektrum dengan Resolusi 0,625 Hz... 18
13. Gambar 2.13 Spektrum dengan Resolusi 0,0625 Hz... 18
14. Gambar 2.14 Proses Pengambilan Data dengan 4 Kali Averaging... 19
15. Gambar 2.15 Waveform Ketidakseimbangan... 19
16. Gambar 2.16 Spektrum Ketidakseimbangan... 20
17. Gambar 2.17 Pompa Sentrifugal... 20
18. Gambar 2.18 Bagian-bagian Pompa Sentrifugal………...……….. 23
19. Gambar 3.1 Diagram Alir Pengukuran Getaran... 25
20. Gambar 3.2 Pompa Sentrifugal... 26
22. Gambar 4.1 Trending Amplitudo Posisi PIH... 42
23. Gambar 4.2 Spektrum PIH Agustus 2005 sampai Oktober 2005... 43
24. Gambar 4.3 Spektrum PIH Oktober 2005 sampai Agustus 2006... 43
25. Gambar 4.4 Spektrum... 44
26. Gambar 4.5 Perbesaran Spektrum... 44
27. Gambar 4.5 Waveform PIH Agustus 2005 sampai Oktober 2006... 45
28. Gambar 4.6 Waveform PIH November 2005 sampai Agustus 2006... 46
29. Gambar 4.7 Waveform... 46
30. Gambar 4.8 Waktu Tiap Gelombang pada Waveform... 47
31. Gambar 4.9 Trending Data Setelah Perbaikan... 48
DAFTAR SIMBOL
Simbol Keterangan Satuan
A Amplitudo mm
f Frekuensi Hz
fn Frekuensi natural Hz
k Konstanta kekakuan N/m
T Periode s
ω Kecepatan sudut rad/s
BAB I
PENDAHULUAN
1.1 Latar Belakang
Tuntutan permintaan produk yang besar membuat sebagian besar
perusahaan tersebut menjalankan proses produksinya dengan kontinyu (continues
production), sehingga dituntut kemampuan fasilitas produksi yang baik. Fasilitas
produksi yang gagal beroperasi tidak hanya menghambat proses produksi tetapi
juga dapat membahayakan ataupun hal-hal lain yang merugikan (misalnya :
kekecewaan konsumen, tidak memenuhi standar kualitas dan sebagainya), yang
pada gilirannya akan mengurangi keuntungan yang seharusnya dapat diraih
perusahaan jika fasilitas dapat berfungsi dengan baik.
Kegiatan merawat mesin untuk selalu dapat melakukan proses produksi
menjadi tugas bagian perawatan, perencanaan perawatan (maintenance planning)
harus disusun sebaik mungkin sehingga dapat meminimalisasi kerusakan yang
terjadi tiba-tiba (break down).
Kerusakan suatu sistem alat akan menghabiskan waktu dan biaya yang
besar, sementara kerusakan sistem alat tersebut tentu disebabkan oleh
kerusakan-kerusakan subsistemnya atau elemen-elemen kecilnya yang tidak segera
teridentifikasi. Untuk mencegah hal tersebut maka dilakukan kegiatan
mengetahui perubahan yang terjadi karena suatu gejala kerusakan sehingga dapat
diketahui secara dini (predictive maintenance philosophy).
Mesin-mesin yang dikenal dalam kehidupan sehari hari merupakan suatu
struktur yang memiliki massa dan kekakuan. Dengan demikian mesin tersebut
memiliki kemampuan untuk bergetar. Analisa getaran merupakan salah satu
parameter analisa dalam predictive maintenance khususnya digunakan untuk
mendeteksi sumber dan gejala kerusakan.
Dalam kaitannya dengan hal tersebut diatas, penelitian ini dilakukan untuk
menganalisis kerusakan mesin secara dini dan merekomendasikan perbaikan yang
tepat sasaran yang pada akhirnya dapat meminimalisasi biaya perawatan.
1.2 Perumusan Masalah
Bagaimana mendeteksi dini kasus unbalance pada pompa sentrifugal
sehingga kerusakan yang parah dapat dihindari.
1.3 Pembatasan Masalah
Dalam tugas akhir ini yang dibahas adalah analisa unbalance pada
pompa sentrifugal berdasarkan sinyal getaran khususnya di PT. AMOCO Mitsui
PTA Indonesia.
Pembatasan dalam tugas akhir ini adalah sebagai berikut :
a. Penelitian dilakukan menggunakan software Machinery Health Manager dari CSi (Computational System Incorporated)
b. Menggunakan Portable data collector CSI 2115 dan 2120 A untuk
pengambilan data di lapangan
c. Data pompa yang dikumpulkan dari pompa Ebara jenis sentrifugal
yaitu BG-106-A (Reactor Feed Pump) di PT. Amoco Mitsui PTA
Indonesia.
1.4 Tujuan Penulisan
Untuk memberikan gambaran mengenai penggunaan sinyal getaran untuk
mendeteksi unbalance pada pompa dan memberikan rekomendasi perbaikan yang
tepat.
1.5 Metodologi Penelitian
Menggunakan studi pustaka dan studi lapangan.
1.6 Sistematika Penulisan
Penyajian penulisan adalah sebagai berikut :
BAB I PENDAHULUAN
Menjelaskan latar belakang masalah, perumusan masalah, kerangka
pemecahan masalah, mengemukakan pentingnya pemecahan masalah,
melakukan pembatasan masalah, dan merancang sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Menguraikan teori-teori yang berhubungan dengan masalah getaran dan
teori yang menjadi dasar pemecahan masalah, serta teori-teori penunjang
BAB III PENGUMPULAN DAN PENGOLAHAN DATA
Berisi kegiatan pengumpulan dan pengolahan data getaran yang
digunakan untuk memberikan rekomendasi penyelesaian pada kerusakan
suatu pompa sentrifugal khususnya untuk kasus unbalance.
BAB IV PEMBAHASAN
Pada bab ini akan dilakukan pembahasan terhadap permasalahan
unbalance yang terjadi pada pompa sentrifugal dan cara mengatasinya
berdasarkan data yang diperoleh dari pengukuran getaran.
BAB V KESIMPULAN DAN SARAN
Pada bab ini diuraikan kesimpulan yang diperoleh dari hasil penelitian dan
menguraikan saran-saran yang mungkin berguna untuk diterapkan dimasa
BAB II
TINJAUAN PUSTAKA
2.1 Teori Getaran
Getaran ditandai dengan perubahan secara periodik dari suatu besaran.
Getaran dapat dilihat dimana-mana seperti ayunan, piston motor bakar yang
bergerak maju mundur dan lain sebagainya.
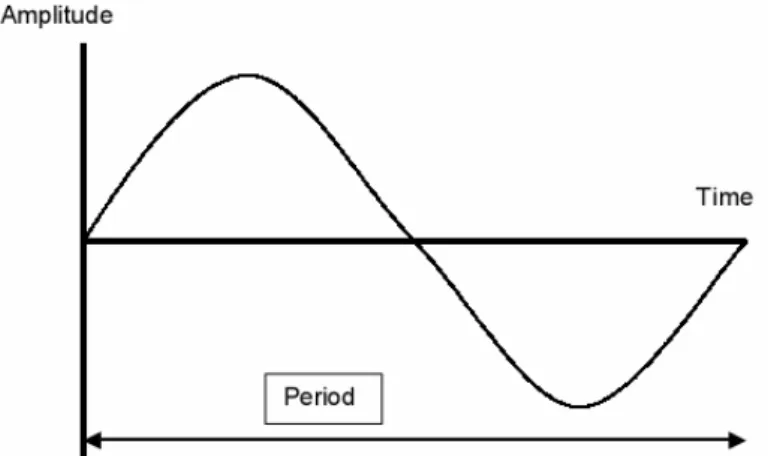
Secara umum, gerak getaran merupakan suatu fungsi periodik, fungsi
periodik dapat dinyatakan sebagai :
x(t) = x(t + T) (2.1)
dimana t adalah waktu dan T merupakan konstanta yang bersatuan waktu dan
disebut sebagai periode. Contoh fungsi periodik digambarkan dalam gambar 2.1.
Gambar 2.1 Fungsi Periodik
Nilai kebalikan dari T disebut frekuensi yaitu
Frekuensi menyatakan jumlah getaran per satuan waktu. Satuan frekuensi adalah
Hertz (Hz). Misalnya, getaran dengan frekuensi 20 Hz berarti bahwa getaran
tersebut bergetar 20 siklus dalam 1 sekon.
Di samping frekuensi f dikenal pula frekuensi sudut dengan lambang ω.
Satuan frekuensi sudut adalah rad/s. Hubungan antara f dan ω dapat dituliskan
sebagai :
ω = 2 π f = 2 π / T (2.3)
2.1.1 Fungsi Harmonik
Fungsi harmonik sederhana dapat dituliskan sebagai :
x = A sin ω t (2.4)
A merupakan amplitudo (m)
ω merupakan frekuensi sudut (rad/s)
Periode atau waktu getar T dapat dinyatakan sebagai
T = 2 π / ω (2.5)
Dan frekuensinya
f = 1 / T = ω / 2 π (2.6)
Jika fungsi harmonik persamaan (2.4) menyatakan simpangan, maka
kecepatannya adalah
t A
x= ωcosϖ (2.7) dan percepatannya adalah
t A x=− ω2sinω atau x x=−ω2 (2.8)
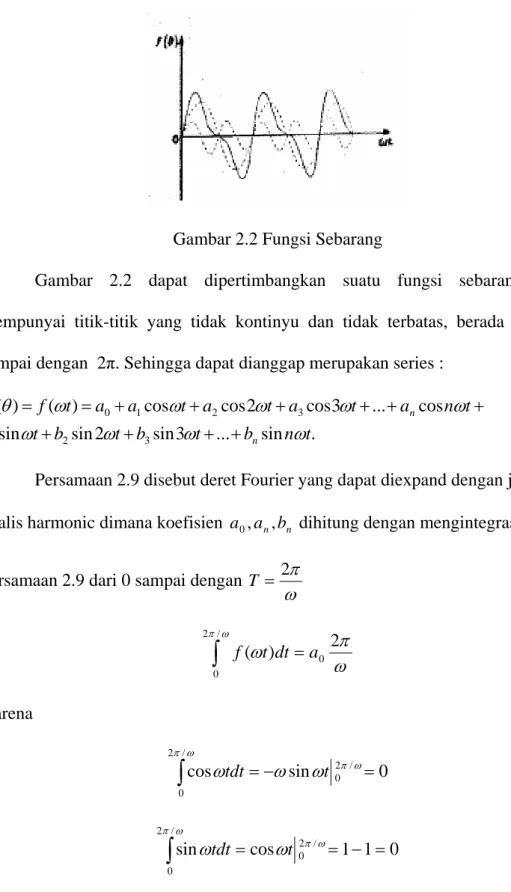
2.1.2 Analisa Harmonik
Gambar 2.2 Fungsi Sebarang
Gambar 2.2 dapat dipertimbangkan suatu fungsi sebarang f(ωt)
mempunyai titik-titik yang tidak kontinyu dan tidak terbatas, berada antara 0
sampai dengan 2π. Sehingga dapat dianggap merupakan series :
. sin ... 3 sin 2 sin sin cos ... 3 cos 2 cos cos ) ( ) ( 3 2 1 3 2 1 0 t n b t b t b t b t n a t a t a t a a t f f n n ω ω ω ω ω ω ω ω ω θ + + + + + + + + + + = = (2.9)
Persamaan 2.9 disebut deret Fourier yang dapat diexpand dengan jalan
analis harmonic dimana koefisien dihitung dengan mengintegrasikan
persamaan 2.9 dari 0 sampai dengan
n n b a a0, , ω π 2 = T
∫
ω = π ω π ω / 2 0 0 2 ) ( t dt a f Karena 0 sin cos 20 / / 2 0 = − =∫
ω π ω π ω ω ωtdt t 0 1 1 cos sin 02 / / 2 0 = − = =∫
ω π ω π ω ωtdt tAnalog masing-masing untuk , cos , 2 cos / 2 0 / 2 0 dt t n tdt
∫
ω∫
π π ω ω ω , sin , 2 sin / 2 0 / 2 0 dt t n tdt∫
ω∫
π π ω ω ω Sehingga∫
= π ω ω π ω 2 / 0 0 ( ) 2 f t dt a (2.10)Bila persamaan 2.9 dikalikan sinωtkemudian diintegrasikan untuk satu periode maka :
(
tdt x t b t b t a t a a tdt t f ω ω ω ω ω ω ω ω π π ω sin ...) 2 sin sin ... 2 cos cos sin ) ( 2 / 2 0 / 2 0 1 2 1 0 + + + + + + =∫
∫
(2.11)Karena dalam persamaan 2.11 diatas :
∫
ω = π ω / 2 0 0 sin tdt∫
ω = π ω ω / 2 0 1cos tsin tdt 0 a(
)
∫
ω = π ω π ω / 2 0 1 2 1 sin t dt b b∫
ω = π ω ω / 2 0 2cos tsin tdt 0 a∫
ω = π ω ω / 2 0 2 sin2 tsin tdt 0 bMaka :
∫
= π ω ω ω π ω2 / 0 1 f( t)sin tdt b (2.12)Hal sama untuk menghitung b2, dikalikan dengan sinnω sehingga secara umum t,
didapat :
∫
= π ω ω ω π ω2 / 0 cos ) ( t n tdt f bn (2.13)Juga bila kedua sisi persamaan 2.9 dikalikan dengan berturut-turut cos tω,
t n
t ω
ω ,...,cos 2
cos , yang secara umum dirumuskan :
∫
= π ω ω ω π ω2 / 0 cos ) ( t n tdt f an (2.14)Dari persamaan 2.9 jumlah dari ancos(nωt)danbnsin(nωt)adalah :
) cos( ) cos( ) sin( ) cos( n n2 n2 n n n n n t b n t a b n t C n t a ω + ω = + ω +ϕ = ω +ϕ
Sehingga persamaan 2.9 dapat ditulis :
) cos( ... ) 2 cos( ) cos( ) ( ) ( f t a0 C1 t 1 C2 t 2 Cn n t n f θ = ω = + ω +ϕ + ω +ϕ + + ω +ϕ (2.15) Disini : n n n a b − = ϕ tan
Menurut analisis Fourrier, setiap fungsi periodik selalu dapat dinyatakan sebagai
penjumlahan dari beberapa fungsi harmonik dengan frekuensi yang merupakan
kelipatan dari frekuensi dasarnya.
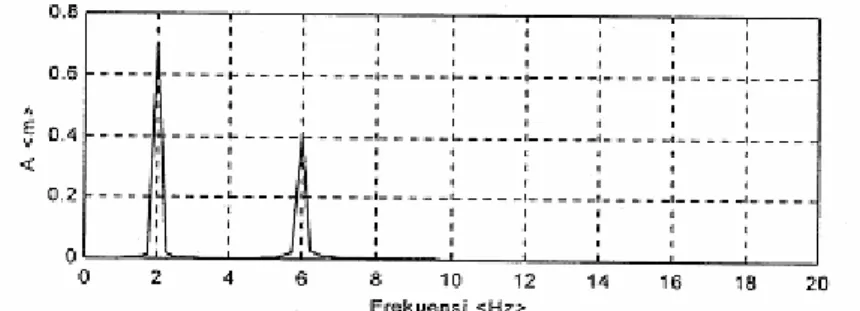
Dua sinyal sinus dijumlahkan menjadi x=x1+x2 kemudian di FFT
Gambar 2.3 Sinyal Sinus x1 dan x2
Uraian suatu fungsi periodik dengan deret Fourrier
Gambar 2.5 FFT dari Penjumlahan Dua Sinyal Sinus x1 dan x2
2.1.3 Dasar-dasar Sinyal Getaran
Gejala getaran pada umumnya dijumpai pada mesin-mesin yang sedang
bekerja atau berputar. Getaran tersebut dapat dirasakan dengan menyetuhkan jari
pada permukaan yang bergetar atau dapat diukur dengan menggunakan sensor
getaran yang diletakkan pada permukaan tersebut.
Dalam pembahasan sinyal getaran secara kuantitatif, ada tiga hal yang
perlu diperhatikan, yaitu :
a. Parameter getaran
Besaran ini dapat diukur dengan menggunakan sensor getaran yang
tersedia di pasaran dan sensor ini dibedakan menjadi :
1. Sensor simpangan getar (displacement)
Mengukur perpidahan poros (shaft) terhadap housing bearing
menggunakan prinsip eddy current. Sensor ini efektif digunakan
pada mesin besar dan menggunakan journal bearing seperti pada
generator, kompresor, turbin, motor-motor besar dan lain-lain.
2. Sensor kecepatan getaran (velocity)
Gambar 2.7 Sensor Kecepatan Getaran
Sensor dipasang pada rumah bantalan yang bergetar, getaran pada
rumah bantalan menyebabkan sensor ikut bergetar, sedangkan
massa pemberat yang dililiti kabel koil cenderung
mempertahankan posisi sehingga mengalami perubahan medan
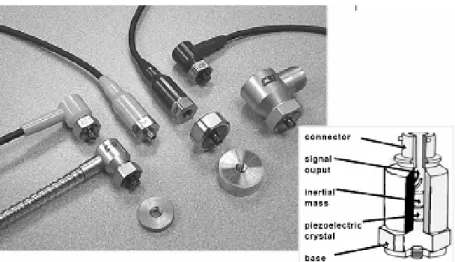
3. Sensor percepatan getaran (Accelorometer)
Gambar 2.8 Sensor Percepatan Getaran
Sensor jenis ini digunakan pada mesin yang porosnya ditopang
oleh rolling element bearing, rolling element bearing mentransfer
hampir semua getaran poros ke rumah bearing, dimana sensor
diletakkan.
Parameter sinyal getaran ini terdiri atas amplitudo dan frekuensi. Untuk
analisis getaran yang efektif perlu dipilih parameter getaran yang tepat.
b. Impedansi mekanik
Dalam pengukuran sinyal getaran maka yang diukur adalah respon
sruktur karena adanya stimulus getaran (misalnya gaya eksitasi getaran,
cacat pada elemen rotasi dan lain-lainnya). Respon getaran ini sangat
dipengaruhi oleh karakteristik dinamik struktur mekanik tempat
pengukuran getaran berlangsung.
Suatu poros ringan berputar pada lapisan minyak dalam bantalan
luncur yang rumahnya berat, hanya sebagian kecil saja getaran poros yang
menggunakan sensor simpangan getaran yang diletakkan dekat dengan
poros.
Untuk bantalan bola, maka elemen bola jauh lebih kaku
dibandingkan dengan lapisan minyak pada bantalan luncur. Hal ini
mengakibatkan baik getaran poros maupun elemen rotasinya diteruskan
pada rumah bantalan.
c. Frekuensi pribadi
Suatu struktur mekanik yang mengalami gaya eksitasi kejut
(impact atau shock) akan bergetar pada salah satu atau pada beberapa
frekuensi pribadinya. Bila frekuensi dari gaya eksitasi getarn sama dengan
frekuensi pribadi struktur maka terjadi resonansi yang mengakibatkan
amplitudo getaran yang besar.
Frekuensi pribadi suatu sitem getaran teegantung pada kekakuan
dan massanya. Hubungan tersebut terlihat dalam rumus berikut :
m k fn π 2 1 = (2.16) k = Koefisien kekakuan [N/m] m = massa [kg]
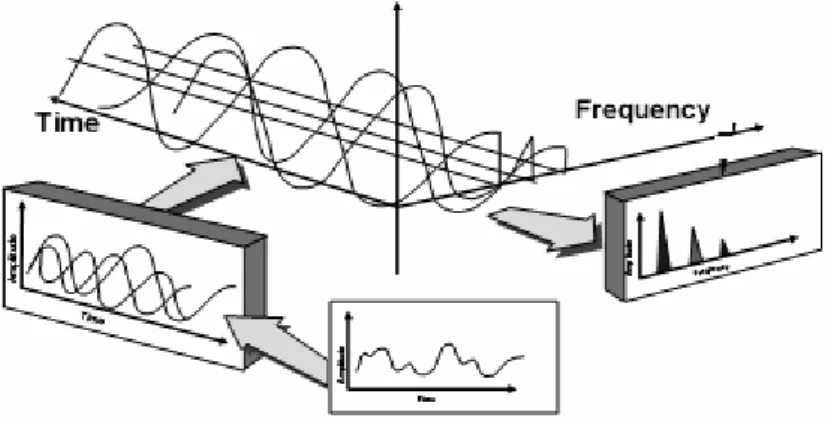
2.1.4 Pengukuran Sinyal Getaran
Untuk memahami perilaku dinamik suatu struktur dilakukan pengukuran
sinyal getaran dalam domain waktu. Sinyal yang terukur adalah amplitudo atau
Pada umumnya pemantauan sinyal getaran tidak dilakukan dalam besaran
mekanik tetapi sinyal getaran tersebut dikonversikan dalam besaran listrik agar
pengolahan sinyal bisa dilakukan lebih mudah. Untuk keperluan tersebut maka
digunakan sensor getaran dan alat pengolah sinyal getaran. Proses analisis sinyal
getaran ditujukan untuk komponen sinyal yang menyusun sinyal yang terukur
dalam domain waktu tersebut.
Di pasaran ada beberapa alat pengolah sinyal getaran, seperti pada gambar
dibawah :
Gambar 2.9 Alat-alat Pengolah Sinyal Getaran
Instrumentasi untuk analisis sinyal getaran ini bisa melakukan
proses konversi sinyal dari domain waktu ke dalam domain frekuensi. Dengan
menggunakan metode analisis tertentu, kumpulan spektrum frekuensi yang
disusun dalam betuk peta spektrum frekuensi dapat dimanfaatkan untuk
kepentingan diagnosis adanya kerusakan yang terjadi pada elemen-elemen rotasi
Gambar 2.10 Spektrum Frekuensi untuk Diagnosis Kerusakan
2.1.4.1 Langkah-Langkah Pengukuran Sinyal Getaran
Untuk memperoleh hasil pengukuran getaran yang baik, ada beberapa hal
yang harus diperhatikan antara lain :
a. Pemilihan sensor getaran yang tepat
Kesalahan dalam pemilihan sensor akan berpengaruh besar pada hasil
analisa sinyal getarannya. Untuk bantalan luncur (journal bearing) sensor
yang tepat adalah sensor simpangan getar (Eddy current probe) dan untuk
bantalan gelinding menggunakan sensor kecepatan atau percepatan.
b. Posisi peletakan sensor
Sensor diletakkan sedekat mungkin dengan bagian yang mentransmisikan
getaran, misalnya pada bearing housing sensor diletakkan seperti pada
Gambar 2.11 Lokasi Penempatan Sensor
c. Pemrosesan sinyal
Alasan yang utama untuk memahami pemrosesan sinyal adalah
diperlukannya data yang akurat untuk menjamin kesuksesan analisis
vibrasi dengan mengetahui hal-hal seperti : resolution, averaging,,
frequency range.
Resolusi (resolution) dari data spektrum dipengaruhi oleh Fmax
dan Number of Lines.
Resolution = Fmax / Number of Lines (2.17)
Fmax adalah frekuensi maksimum dan Number of Lines adalah jumlah
segmen yang membagi frequency range dengan besar segmen yang sama.
Resolusi digunakan pada saat proses FFT. Semakin tinggi number of lines
akan menghasilkan akurasi yang lebih baik tetapi memerlukan waktu
pengambilan data yang lebih lama. Gambar spektrum di bawah
S-OX - DRYER SCRUBBER BLOWER B BC-302 B -MIH MOTOR INBOARD HORIZONTAL
Route Spectrum 10-May-07 09:12:50 OVERALL= 1.07 V-DG RMS = 1.06 LOAD = 100.0 RPM = 2989. (49.82 Hz) 0 30 60 90 120 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Frequency in Hz R M S V elo ci t y i n m m /S e c Freq: Ordr: Spec: 100.00 2.007 .431
Gambar 2.12 Spektrum dengan Resolusi 0,625 Hz
S-OX - DRYER SCRUBBER BLOWER B BC-302 B -MIR MOTOR INBOARD HORIZONTAL HiRes
Route Spectrum 10-May-07 09:13:01 OVERALL= 1.07 V-DG RMS = 1.06 LOAD = 100.0 RPM = 2983. (49.72 Hz) 0 30 60 90 120 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Frequency in Hz R M S V elo ci t y in m m /S e c Freq: Ordr: Spec: 100.06 2.013 .397
Gambar 2.13 Spektrum dengan Resolusi 0,0625 Hz
Karena vibrasi tidak bisa terbebas dari gangguan atau noise maka
diperlukan beberapa kali pengambilan data kemudian merata-ratanya.
Gambar 2.14 Proses Pengambilan Data dengan 4 Kali Averaging
2.1.4.2 Analisa Vibrasi
Masalah pada suatu peralatan yang sering ditemukan antara lain masa tak
seimbang (unbalance). Unbalance atau ketidaksembangan adalah kondisi dimana
pusat masa tidak sesumbu dengan sumbu rotasi. Ketidakseimbangan ini
diakibatkan oleh beberapa faktor antara lain kesalahan proses permesinan, korosi
atau keausan yang tidak merata, komponen yang bengkok atau patah,
penumpukan material misalnya debu pada sudu kompresor dan sebagainya. Pada
time waveform sinyalnya sangat sinusoidal dan pada spektrum sangat didominasi
oleh 1X RPM.
Gambar 2.16 Spektrum Ketidakseimbangan
2.2 Pompa Sentrifugal.
Gambar 2.17 Pompa Sentrifugal
2.2.1 Ciri-ciri Pompa Sentrifugal
• Umumnya memiliki rumah/casing berbentuk volute (rumah keong). • Untuk suction head negative harus dipriming/dipancing.
• Bentuk secara umum lebih besar dan lebih kompleks dibanding dengan pompa positive displacement.
• Umumnya digunakan untuk kapasitas besar dengan head yang sedang.
2.2.2 Prinsip Kerja
Fluida dihisap oleh impeller yang berputar, pada impeller terdapat
sudu-sudu atau blade dan fluida saat masuk dan melewati sudu-sudu/blade yang berputar
akan terlempar sehingga fluida akan mengalami kenaikan kecepatan dan
diarahkan ke volute.
2.2.3 Bagian-bagian Pompa Sentrifugal
Secara umum pompa sentrifugal mempunyai bagian-bagian utama sebagai berikut :
1. Rotor.
Yaitu bagian pompa yang berputar dan terdiri dari : a. Impeller.
Adalah bagian pompa yang berfungsi untuk menaikkan kecepatan dan tekanan fluida.
b. Shaft.
Adalah bagian pompa yang berfungsi sebagai pusat atau sumbu gerakan rotasi dan juga merupakan tempat kedudukan impeller.
2. Stator.
Yaitu bagian pompa yang diam dan terdiri dari :
a. Casing (rumah pompa)
Adalah bagian pompa yang berfungsi sebagai rumah dan pelindung
impeller. Casing ini umumnya berupa barang cetakan (casting).
Adalah bagian pompa yang berfungsi sebagai tempat/kedudukan bearing/
bantalan.
3. Alat penunjang.
Terdiri dari :
1. Bearing/bantalan.
Adalah bagian yang berfungsi sebagai tumpuan beban pada pompa dan
merupakan tempat bergeseknya bagian yang berputar dan diam.
Berdasarkan fungsinya bantalan ada dua macam yaitu :
a. Bantalan radial.
Bantalan yang berfungsi menumpu beban radial.
b. Bantalan axial.
Bantalan yang berfungsi menunpu beban axial.
Berdasarkan besar kecilnya beban bantalan konstruksi bantalan dibedakan
menjadi dua yaitu :
a. Bantalan sleeve (journal bearing)
b. Bantalan gelinding (ball bearing, roller bearing), bantalan akan
berfungsi dengan bila ditunjang dengan pelumasan yang cukup dan
sempurna. Untuk itu baik saat menjalankan pompa maupun kondisi
running pelumasan harus selalu dikontrol.
2. Perapat /sealing.
Didalam pompa clearence (gap) antara bagian yang diam dan berputar
selalu ada, sehingga dengan demikian kebocoran akan selalu ada. Adapun
langkah yang kita ambil hanyalah berusaha meminimkan clearence dan
mendesain atau memilih perapat yang cukup handal.
2.2.4 Masalah pada Pompa Sentrifugal
Permasalahan yang sering terjadi pada pompa sentrifugal seperti pada
tabel dibawah :
Tabel 2.1 Masalah pada Pompa dan Penyebabnya
No Masalah/Indikasi Penyebab
1. Level vibrasi naik. • Bearing damage • Misalligment • Kavitasi
• Unbalance (kekendoran, shaft bengkok, impeller cacat)
• Coupling. 2. Flow berkurang pada
putaran yang sama.
• Kavitasi
• Over size pada wearing ring (bertahap) • Suction strainer buntu
• Bukaan valve pada suction dan discharge tidak sempurna
• Buntu pada line discharge. 3. Sistem perapat bocor • Seal flush terlambat masuk
• Seal flush kotor
• Damage pada sistem perapatnya. 4. Noice/suara • Kavitasi
BAB III
PENGUMPULAN DAN PENGOLAHAN DATA
3.1 Diagram Alir Pengukuran Getaran
Kegiatan pengukuran data getaran mengikuti diagram alir seperti pada
gambar 3.1. Pengambilan data dilakukan berkala sesuai tingkat kekritisan pompa,
semakin kritis pompa interval pengambilan data semakin cepat. Jika data yang
diperoleh mencapai nilai alarm maka akan diadakan analisa untuk menerbitkan
rekomendasi perbaikannya. Apakah hasil pengukuran melewati batas alarm ? N Y Persiapan : - Database - Penjadwalan Identifikasi masalah Perbaikan Pengukuran sebagai referensi awal Pengukuran berkala Perencanaan perbaikan
3.2 Pengambilan Data Getaran
Kegiatan kajian kasus unbalance dimulai dengan mengumpulkan data-data
getaran pada pompa yang kemungkinan terjadi kasus unbalance. Persiapan
pengambilan data dimulai dengan pembuatan database pada software. Database
dibuat dengan memperhatikan data sheet pompa yang akan diukur dan
posisi-posisi pengukuran. Data pompa yang analisa adalah sebagai berikut :
1. Data pompa • Pompa : Ebara • Jenis : Sentrifugal • Size/type : 150 x 100 UCWM-40 • Putaran : 2980 rpm Motor penggerak • Motor : Toshiba • Daya : 280 KW
Gambar 3.2 Pompa Sentrifugal
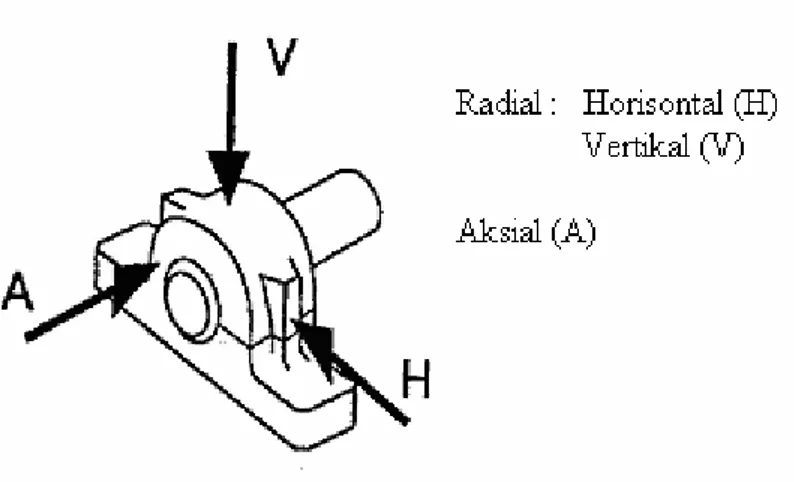
2. Posisi Pengukuran
Seperti pada pembahasan di BAB II, posisi pengukuran harus sedekatmungkin
dengan sumber getaran, dalam hal ini efek getaran dari unbalance yang
diakibatkan oleh poros ataupun impeller ditranfer melalui bantalan ke rumah
bantalan. Pada pompa sentrifugal mempunyai dua buah bantalan, maka
pengukuran dilakukan pada posisi bantalan dari arah horisontal, vertikal dan
aksial. Pada gambar 3.2 menunjukkan posisi-posisi pengambilan data getaran,
M = motor, P = pompa, H = horisontal, V = vertikal, A = aksial, B = bearing,
I = inboard (dekat kopling) dan O = outboard (jauh dari kopling).
Contoh : PIH = Pompa inboard horisontal
Base plate motor Base plate pump
MA MIV/MIB MOV/MOB MIH MOH POV/POB PIV/PIB POH PIH PA
Gambar 3.3 Posisi Pengukuran
Pengukuran data getaran dilakukan secara berkala seminggu sekali dengan
tujuan untuk mengetahui perubahan nilainya. Data dapat di proses ke dalam
dikeluarkan status pompa tersebut, apakah masih layak beroperasi atau harus
dilakukan perbaikan.
Data yang peroleh dalam periode Agustus 2005 sampai Agustus 2006 seperti pada
tabel 3.1 berikut :
Tabel 3.1 Hasil Pengukuran Periode Agustus 2005 sampai Agustus 2006
DATE TIME OVERALL ---- ---- ---
BG-106 A - MOH-MOTOR OUTBOARD HORIZONTAL mm/sec 30-Aug-05 10:04 1.031 05-Sep-05 08:39 1.086 06-Sep-05 16:10 1.098 13-Sep-05 09:11 .977 20-Sep-05 14:36 1.086 04-Oct-05 10:05 1.068 11-Oct-05 10:39 .994 18-Oct-05 14:59 .961 25-Oct-05 14:29 .960 26-Oct-05 13:29 1.014 01-Nov-05 10:56 1.078 08-Nov-05 10:43 1.114 15-Nov-05 10:49 1.000 13-Dec-05 16:11 .851 20-Dec-05 09:07 .946 27-Dec-05 09:39 1.100 03-Jan-06 10:28 1.029 10-Jan-06 10:01 1.103 17-Jan-06 13:59 1.123 24-Jan-06 11:04 1.000 31-Jan-06 12:59 .997 07-Feb-06 13:05 .997 16-Feb-06 08:59 1.089 21-Feb-06 14:12 1.052 28-Feb-06 09:03 .957 07-Mar-06 10:35 1.043 14-Mar-06 09:13 1.082 16-Mar-06 13:48 1.014 25-Aug-06 16:36 .821
BG-106 A - MOV-MOTOR OUTBOARD VERTICAL mm/sec 30-Aug-05 10:05 .226 05-Sep-05 08:39 .273 06-Sep-05 16:11 .289 13-Sep-05 09:11 .257 20-Sep-05 14:36 .267 04-Oct-05 10:05 .248 11-Oct-05 10:39 .254 18-Oct-05 14:59 .236 25-Oct-05 14:29 .284 26-Oct-05 13:30 .292 01-Nov-05 10:57 .249 08-Nov-05 10:43 .261 15-Nov-05 10:49 .284 13-Dec-05 16:11 .157 20-Dec-05 09:07 .247 27-Dec-05 09:39 .265 03-Jan-06 10:28 .255 10-Jan-06 10:01 .260 17-Jan-06 13:59 .287 24-Jan-06 11:04 .322 31-Jan-06 12:59 .279 07-Feb-06 13:05 .267 16-Feb-06 08:59 .280 21-Feb-06 14:12 .295 28-Feb-06 09:03 .272 07-Mar-06 10:35 .305 14-Mar-06 09:14 .302 16-Mar-06 13:48 .300 25-Aug-06 16:37 .178 BG-106 A - MA -MOTOR AXIAL mm/sec 30-Aug-05 10:05 .250 05-Sep-05 08:40 .251 06-Sep-05 16:11 .273 13-Sep-05 09:12 .236 20-Sep-05 14:36 .248 04-Oct-05 10:05 .238 11-Oct-05 10:39 .252 18-Oct-05 14:59 .248 25-Oct-05 14:30 .238 26-Oct-05 13:30 .293 01-Nov-05 10:57 .343 08-Nov-05 10:43 .444 15-Nov-05 10:49 .497
13-Dec-05 16:11 .255 20-Dec-05 09:07 .246 27-Dec-05 09:39 .344 03-Jan-06 10:29 .272 10-Jan-06 10:01 .284 17-Jan-06 13:59 .288 24-Jan-06 11:04 .290 31-Jan-06 12:59 .276 07-Feb-06 13:06 .263 16-Feb-06 08:59 .320 21-Feb-06 14:12 .286 28-Feb-06 09:03 .277 07-Mar-06 10:36 .341 14-Mar-06 09:14 .281 16-Mar-06 13:49 .293 25-Aug-06 16:37 .239
BG-106 A - MIH-MOTOR INBOARD HORIZONTAL mm/sec 30-Aug-05 10:05 1.080 05-Sep-05 08:40 1.119 06-Sep-05 16:11 1.147 13-Sep-05 09:12 1.058 20-Sep-05 14:36 1.087 04-Oct-05 10:06 1.133 11-Oct-05 10:39 1.067 18-Oct-05 15:00 1.037 25-Oct-05 14:30 .997 26-Oct-05 13:30 1.109 01-Nov-05 10:57 1.186 08-Nov-05 10:43 1.174 15-Nov-05 10:50 1.069 13-Dec-05 16:12 .893 20-Dec-05 09:08 1.044 27-Dec-05 09:39 1.073 03-Jan-06 10:29 1.050 10-Jan-06 10:01 1.127 17-Jan-06 14:00 1.050 24-Jan-06 11:04 .995 31-Jan-06 13:00 1.091 07-Feb-06 13:06 1.036 16-Feb-06 08:59 1.105 21-Feb-06 14:12 1.100 28-Feb-06 09:04 1.017 07-Mar-06 10:36 1.059 14-Mar-06 09:14 1.043 16-Mar-06 13:49 1.064
25-Aug-06 16:37 .827
BG-106 A - MIV-MOTOR INBOARD VERTICAL mm/sec 30-Aug-05 10:05 .244 05-Sep-05 08:40 .282 06-Sep-05 16:11 .288 13-Sep-05 09:12 .257 20-Sep-05 14:37 .290 04-Oct-05 10:06 .249 11-Oct-05 10:40 .265 18-Oct-05 15:00 .246 25-Oct-05 14:30 .231 26-Oct-05 13:30 .259 01-Nov-05 10:57 .255 08-Nov-05 10:43 .277 15-Nov-05 10:50 .296 13-Dec-05 16:12 .163 20-Dec-05 09:08 .262 27-Dec-05 09:39 .242 03-Jan-06 10:30 .269 10-Jan-06 10:01 .290 17-Jan-06 14:00 .316 24-Jan-06 11:05 .275 31-Jan-06 13:00 .339 07-Feb-06 13:06 .267 16-Feb-06 09:00 .285 21-Feb-06 14:12 .312 28-Feb-06 09:04 .274 07-Mar-06 10:36 .283 14-Mar-06 09:15 .268 16-Mar-06 13:49 .276 25-Aug-06 16:37 .190 26-Aug-06 22:38 6.593
BG-106 A - PIH-PUMP INBOARD HORIZONTAL mm/sec 30-Aug-05 10:06 2.596 02-Sep-05 10:07 2.475 05-Sep-05 08:40 2.713 06-Sep-05 16:12 2.867 13-Sep-05 09:12 2.587 20-Sep-05 14:37 2.973 04-Oct-05 10:06 2.651 11-Oct-05 10:40 2.549 18-Oct-05 15:00 2.810 25-Oct-05 14:30 2.599
26-Oct-05 13:31 2.750 01-Nov-05 10:58 3.150 08-Nov-05 10:44 2.827 15-Nov-05 10:50 2.470 13-Dec-05 16:15 2.896 14-Dec-05 08:37 3.309 15-Dec-05 09:22 3.053 16-Dec-05 09:00 3.029 17-Dec-05 15:18 3.385 18-Dec-05 09:57 3.295 19-Dec-05 09:32 3.033 20-Dec-05 09:08 2.956 21-Dec-05 08:56 3.093 22-Dec-05 09:11 3.379 23-Dec-05 09:01 2.785 24-Dec-05 09:03 3.064 26-Dec-05 09:38 3.272 27-Dec-05 09:40 2.943 28-Dec-05 10:16 2.923 30-Dec-05 10:08 2.983 01-Jan-06 09:28 2.922 03-Jan-06 10:30 2.876 06-Jan-06 08:52 2.970 08-Jan-06 08:46 2.950 10-Jan-06 10:02 2.957 13-Jan-06 08:54 2.778 17-Jan-06 14:00 3.106 24-Jan-06 11:05 2.834 31-Jan-06 13:01 2.841 07-Feb-06 13:06 2.977 16-Feb-06 09:00 2.855 21-Feb-06 14:13 3.285 28-Feb-06 09:04 3.187 07-Mar-06 10:36 3.029 14-Mar-06 09:15 2.970 16-Mar-06 13:49 3.261 20-Mar-06 16:45 3.627 26-Mar-06 09:56 3.403 26-Mar-06 12:56 5.599 26-Mar-06 13:29 4.455 26-Mar-06 14:02 4.490 26-Mar-06 16:03 4.973 26-Mar-06 19:50 5.190 26-Mar-06 22:59 5.184 25-Aug-06 16:37 5.940 25-Aug-06 16:53 5.979 25-Aug-06 17:01 6.084
25-Aug-06 18:39 5.940 26-Aug-06 08:16 5.967 26-Aug-06 15:15 5.558 26-Aug-06 15:40 5.618 26-Aug-06 16:12 6.757 26-Aug-06 16:43 6.064 26-Aug-06 22:38 6.735
BG-106 A - PIV-PUMP INBOARD VERTICAL mm/sec 30-Aug-05 10:06 .557 02-Sep-05 10:08 .527 05-Sep-05 08:41 .562 06-Sep-05 16:12 .546 13-Sep-05 09:13 .526 20-Sep-05 14:37 .555 04-Oct-05 10:06 .494 11-Oct-05 10:40 .582 18-Oct-05 15:00 .547 25-Oct-05 14:31 .595 26-Oct-05 13:31 .624 01-Nov-05 10:58 .570 08-Nov-05 10:44 .542 15-Nov-05 10:50 .521 13-Dec-05 16:12 .508 14-Dec-05 08:37 .628 15-Dec-05 09:22 .623 16-Dec-05 09:00 .549 17-Dec-05 15:18 .560 18-Dec-05 09:58 .582 19-Dec-05 09:33 .549 20-Dec-05 09:08 .550 21-Dec-05 08:57 .554 22-Dec-05 09:11 .581 23-Dec-05 09:01 .561 24-Dec-05 09:03 .562 26-Dec-05 09:38 .626 27-Dec-05 09:40 .549 28-Dec-05 10:16 .568 30-Dec-05 10:08 .572 01-Jan-06 09:28 .591 03-Jan-06 10:30 .570 06-Jan-06 08:52 .595 08-Jan-06 08:46 .570 10-Jan-06 10:02 .626 13-Jan-06 08:55 .583
17-Jan-06 14:01 .653 24-Jan-06 11:05 .671 31-Jan-06 13:01 .682 07-Feb-06 13:06 .739 16-Feb-06 09:00 .702 21-Feb-06 14:13 .726 28-Feb-06 09:04 .687 07-Mar-06 10:36 .741 14-Mar-06 09:15 .715 16-Mar-06 13:49 .691 20-Mar-06 16:42 1.263 26-Mar-06 09:56 1.019 26-Mar-06 12:53 1.569 26-Mar-06 13:20 1.223 26-Mar-06 14:02 .923 26-Mar-06 16:03 1.002 26-Mar-06 22:56 1.074 25-Aug-06 16:38 1.052 25-Aug-06 16:53 .909 25-Aug-06 17:01 1.000 25-Aug-06 18:31 3.131 26-Aug-06 08:16 .687 26-Aug-06 14:58 .843 26-Aug-06 15:41 .698 26-Aug-06 16:12 .629 26-Aug-06 16:41 .618 26-Aug-06 22:20 .781
BG-106 A - PIB-PUMP INBOARD VERTICAL BRG. G 30-Aug-05 10:06 .271 02-Sep-05 10:08 .250 05-Sep-05 08:41 .260 06-Sep-05 16:12 .208 13-Sep-05 09:13 .221 20-Sep-05 14:37 .215 04-Oct-05 10:07 .239 11-Oct-05 10:40 .238 18-Oct-05 15:01 .210 25-Oct-05 14:31 .253 26-Oct-05 13:31 .200 01-Nov-05 10:58 .224 08-Nov-05 10:44 .199 15-Nov-05 10:50 .412 13-Dec-05 16:12 .250 14-Dec-05 08:37 .231 15-Dec-05 09:22 .222
16-Dec-05 09:00 .199 17-Dec-05 15:19 .200 18-Dec-05 09:58 .207 19-Dec-05 09:33 .296 20-Dec-05 09:08 .180 21-Dec-05 08:57 .209 22-Dec-05 09:11 .250 23-Dec-05 09:01 .467 24-Dec-05 09:03 .218 26-Dec-05 09:39 .246 27-Dec-05 09:40 .219 28-Dec-05 10:16 .324 30-Dec-05 10:08 .512 01-Jan-06 09:28 .220 03-Jan-06 10:30 .317 06-Jan-06 08:52 .268 08-Jan-06 08:46 .207 10-Jan-06 10:02 .250 13-Jan-06 08:55 .193 17-Jan-06 14:01 .234 24-Jan-06 11:05 .241 31-Jan-06 13:01 .300 07-Feb-06 13:06 .245 16-Feb-06 09:00 .272 21-Feb-06 14:13 .215 28-Feb-06 09:04 .208 07-Mar-06 10:37 .211 14-Mar-06 09:15 .226 16-Mar-06 13:49 .196 20-Mar-06 16:42 .262 26-Mar-06 09:56 .319 26-Mar-06 12:53 .342 26-Mar-06 13:20 .278 26-Mar-06 14:02 .236 26-Mar-06 16:03 .274 26-Mar-06 22:56 .279 25-Aug-06 16:38 .205 25-Aug-06 16:54 .202 25-Aug-06 17:02 .226 25-Aug-06 18:32 .246 26-Aug-06 08:17 .240 26-Aug-06 14:58 .239 26-Aug-06 15:41 .248 26-Aug-06 16:13 .232 26-Aug-06 16:41 .229 26-Aug-06 22:21 .248
BG-106 A - POH-PUMP OUTBOARD HORIZONTAL mm/sec 30-Aug-05 10:07 2.181 02-Sep-05 10:08 2.055 05-Sep-05 08:42 2.272 06-Sep-05 16:12 2.426 13-Sep-05 09:13 2.159 20-Sep-05 14:38 2.366 04-Oct-05 10:07 2.300 11-Oct-05 10:41 2.282 18-Oct-05 15:01 2.417 25-Oct-05 14:31 2.279 26-Oct-05 13:31 2.280 01-Nov-05 10:58 2.721 08-Nov-05 10:44 2.365 15-Nov-05 10:51 2.219 13-Dec-05 16:12 2.670 14-Dec-05 08:38 2.841 15-Dec-05 09:23 2.717 16-Dec-05 09:01 2.640 17-Dec-05 15:19 2.926 18-Dec-05 09:58 2.745 19-Dec-05 09:33 2.570 20-Dec-05 09:09 2.565 21-Dec-05 08:57 2.557 22-Dec-05 09:11 2.813 23-Dec-05 09:01 2.356 24-Dec-05 09:04 2.428 26-Dec-05 09:39 2.826 27-Dec-05 09:40 2.470 28-Dec-05 10:16 2.580 30-Dec-05 10:09 2.526 01-Jan-06 09:29 2.519 03-Jan-06 10:30 2.356 06-Jan-06 08:52 2.541 08-Jan-06 08:46 2.422 10-Jan-06 10:03 2.446 13-Jan-06 08:55 2.356 17-Jan-06 14:01 2.580 24-Jan-06 11:05 2.271 31-Jan-06 13:01 2.306 07-Feb-06 13:07 2.430 16-Feb-06 09:00 2.323 21-Feb-06 14:13 2.684 28-Feb-06 09:05 2.602 07-Mar-06 10:37 2.494 14-Mar-06 09:15 2.486
16-Mar-06 13:50 2.510 20-Mar-06 16:43 3.081 26-Mar-06 09:56 2.841 26-Mar-06 13:20 3.723 26-Mar-06 14:02 3.733 26-Mar-06 16:03 4.508 26-Mar-06 22:57 4.018 25-Aug-06 16:38 5.542 25-Aug-06 16:55 6.782 25-Aug-06 17:02 5.668 25-Aug-06 18:33 5.235 26-Aug-06 08:17 5.101 26-Aug-06 14:59 6.567 26-Aug-06 15:41 5.199 26-Aug-06 16:13 5.963 26-Aug-06 16:41 5.654 26-Aug-06 22:21 4.679
BG-106 A - POV-PUMP OUTBOARD VERTICAL mm/sec 30-Aug-05 10:07 .651 02-Sep-05 10:09 .659 05-Sep-05 08:42 .635 06-Sep-05 16:13 .613 13-Sep-05 09:13 .615 20-Sep-05 14:38 .704 04-Oct-05 10:07 .571 11-Oct-05 10:41 .736 18-Oct-05 15:01 .437 25-Oct-05 14:31 .590 26-Oct-05 13:32 .754 01-Nov-05 10:59 .606 08-Nov-05 10:44 .695 15-Nov-05 10:51 .641 13-Dec-05 16:13 .608 14-Dec-05 08:38 .601 15-Dec-05 09:23 .548 16-Dec-05 09:01 .589 17-Dec-05 15:19 .760 18-Dec-05 09:59 .830 19-Dec-05 09:33 .525 20-Dec-05 09:09 .718 21-Dec-05 08:57 .675 22-Dec-05 09:12 .563 23-Dec-05 09:02 .791 24-Dec-05 09:04 .508 26-Dec-05 09:39 .775
27-Dec-05 09:40 .635 28-Dec-05 10:16 .610 30-Dec-05 10:09 .631 01-Jan-06 09:29 .646 03-Jan-06 10:31 .530 06-Jan-06 08:53 .684 08-Jan-06 08:47 .551 10-Jan-06 10:03 .601 13-Jan-06 08:55 .593 17-Jan-06 14:01 .530 24-Jan-06 11:06 .568 31-Jan-06 13:02 .809 07-Feb-06 13:07 .645 16-Feb-06 09:01 .803 21-Feb-06 14:13 .682 28-Feb-06 09:05 .689 07-Mar-06 10:37 .727 14-Mar-06 09:16 .631 16-Mar-06 13:50 .666 20-Mar-06 16:43 1.856 26-Mar-06 09:57 1.144 26-Mar-06 13:20 1.543 26-Mar-06 14:03 1.235 26-Mar-06 16:03 2.381 26-Mar-06 22:57 2.084 25-Aug-06 16:38 1.642 25-Aug-06 16:56 1.684 25-Aug-06 17:02 1.713 25-Aug-06 18:33 1.524 26-Aug-06 08:17 1.122 26-Aug-06 14:59 1.819 26-Aug-06 15:42 1.194 26-Aug-06 16:13 1.288 26-Aug-06 16:42 1.190 26-Aug-06 22:21 .970
BG-106 A - POB-PUMP OUTBOARD VERTICAL BRG. G 30-Aug-05 10:07 .187 02-Sep-05 10:09 .173 05-Sep-05 08:42 .188 06-Sep-05 16:13 .255 13-Sep-05 09:14 .219 20-Sep-05 14:38 .197 04-Oct-05 10:07 .183 11-Oct-05 10:41 .196
18-Oct-05 15:02 .171 25-Oct-05 14:32 .175 26-Oct-05 13:32 .207 01-Nov-05 10:59 .178 08-Nov-05 10:44 .210 15-Nov-05 10:51 .176 13-Dec-05 16:13 .191 14-Dec-05 08:38 .193 15-Dec-05 09:23 .215 16-Dec-05 09:01 .189 17-Dec-05 15:19 .242 18-Dec-05 09:59 .198 19-Dec-05 09:34 .181 20-Dec-05 09:09 .206 21-Dec-05 08:58 .214 22-Dec-05 09:12 .174 23-Dec-05 09:02 .245 24-Dec-05 09:04 .177 26-Dec-05 09:40 .240 27-Dec-05 09:41 .196 28-Dec-05 10:17 .189 30-Dec-05 10:09 .185 01-Jan-06 09:29 .182 03-Jan-06 10:31 .180 06-Jan-06 08:53 .204 08-Jan-06 08:47 .187 10-Jan-06 10:03 .221 13-Jan-06 08:55 .182 17-Jan-06 14:01 .195 24-Jan-06 11:06 .268 31-Jan-06 13:02 .197 07-Feb-06 13:07 .302 16-Feb-06 09:01 .210 21-Feb-06 14:13 .202 28-Feb-06 09:05 .178 07-Mar-06 10:37 .208 14-Mar-06 09:16 .242 16-Mar-06 13:50 .205 20-Mar-06 16:43 .325 26-Mar-06 09:57 .296 26-Mar-06 13:21 .251 26-Mar-06 14:03 .229 26-Mar-06 16:03 .401 26-Mar-06 22:57 .368 25-Aug-06 16:38 .260 25-Aug-06 16:56 .254 25-Aug-06 17:02 .282
25-Aug-06 18:33 .286 26-Aug-06 08:17 .269 26-Aug-06 14:59 .304 26-Aug-06 15:42 .246 26-Aug-06 16:14 .257 26-Aug-06 16:42 .265 26-Aug-06 22:22 .740
BG-106 A - POA-PUMP OUTBOARD AXIAL mm/sec 30-Aug-05 10:07 .774 02-Sep-05 10:09 .704 05-Sep-05 08:42 .661 06-Sep-05 16:13 .731 13-Sep-05 09:14 .655 20-Sep-05 14:38 .667 04-Oct-05 10:08 .580 11-Oct-05 10:41 .590 18-Oct-05 15:02 .661 25-Oct-05 14:32 .753 26-Oct-05 13:32 .656 01-Nov-05 10:59 .684 08-Nov-05 10:45 .658 15-Nov-05 10:51 .635 13-Dec-05 16:13 .709 14-Dec-05 08:38 .734 15-Dec-05 09:24 .722 16-Dec-05 09:01 .734 17-Dec-05 15:20 .730 18-Dec-05 09:59 .681 19-Dec-05 09:34 .699 20-Dec-05 09:09 .673 21-Dec-05 08:58 .770 22-Dec-05 09:12 .732 23-Dec-05 09:02 .724 24-Dec-05 09:04 .686 26-Dec-05 09:40 .776 27-Dec-05 09:41 .684 28-Dec-05 10:17 .689 30-Dec-05 10:09 .717 01-Jan-06 09:29 .715 03-Jan-06 10:31 .726 06-Jan-06 08:53 .759 08-Jan-06 08:47 .781 10-Jan-06 10:03 .760 13-Jan-06 08:56 .806
17-Jan-06 14:02 .762 24-Jan-06 11:06 .773 31-Jan-06 13:02 .848 07-Feb-06 13:07 .792 16-Feb-06 09:01 .756 21-Feb-06 14:14 .800 28-Feb-06 09:05 .714 07-Mar-06 10:37 .744 14-Mar-06 09:16 .742 16-Mar-06 13:50 .833 20-Mar-06 16:43 1.059 26-Mar-06 09:57 .982 26-Mar-06 13:21 1.492 26-Mar-06 14:03 .871 26-Mar-06 16:04 1.445 26-Mar-06 22:58 1.345 25-Aug-06 16:39 .898 25-Aug-06 16:56 .879 25-Aug-06 17:02 .946 25-Aug-06 18:33 .862 26-Aug-06 08:18 .809 26-Aug-06 14:59 1.000 26-Aug-06 15:42 .836 26-Aug-06 16:14 .874 26-Aug-06 16:42 .883 26-Aug-06 22:22 1.052
BAB IV
PEMBAHASAN
4.1 Analisa Trending Data
Hasil pembacaan data overall pada BAB II menunjukkan posisi PIH
(pompa inboard horizontal) mempunyai nilai yang tertinggi dan sudah melewati
limit alarm berdasarkan ISO 10816 – 1995, pompa class III alarm 1 : 4,5 mm/s
dan alarm 2/Danger = 11.2 mm/s. Dengan demikian cukup posisi PIH yang di
analisa untuk mengetahui indikasi apa yang terjadi pada pompa tersebut meskipun
tidak menutup kemungkinan posisi-posisi yang lain juga dapat dianalisa.
Kecenderungan kenaikan amplitudo overall posisi PIH dapat dilihat dari
trend data periode Agustus 2005 sampai dengan Agustus 2006 seperti terlihat
pada gambar 3.5.
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
Trend Display of Overall Value -- Baseline -- Value: 1.495 Date: 06-Jul-01 0 50 100 150 200 250 300 350 400 2 3 4 5 6 7 8
Days: 30-Aug-05 To 26-Aug-06
RMS Velocity in m m /Sec Date: Time: Ampl: 26-Aug-06 22:38:39 6.735
4.2 Analisa Spektrum
Untuk mengetahui indikasi apa yang terjadi pada pompa tersebut, data
posisi PIH diubah ke dalam bentuk spektrum seperti pada gambar 4.2 dan 4.3
R M S V elo ci t y in m m /S ec Frequency in Hz
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
0 100 200 300 400 500 0 1 2 3 4 5 Max Amp 2.59 10:40:23 11-Oct-05 09:12:52 13-Sep-05 10:06:12 30-Aug-05 09:35:17 21-Aug-05 10:41:22 19-Aug-05 08:49:20 16-Aug-05 13:46:12 13-Aug-05
Gambar 4.2 Spektrum PIH Agustus 2005 sampai Oktober 2005
R M S Ve loc it y in mm/Se c Frequency in Hz
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
0 100 200 300 400 500 0 1 2 3 4 5 Max Amp 5.28 10:58:11 01-Nov-05 08:37:28 14-Dec-05 10:30:11 03-Jan-06 13:06:35 07-Feb-06 13:49:33 16-Mar-06 08:16:28 26-Aug-06
Untuk mengetahui puncak spektrum pada frekuensi berapa, maka data
spektrum tersebut dipetakan ke dalam frekuensi-frekuensinya seperti terlihat pada
gambar 4.4
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
Route Spectrum 26-Aug-06 08:16:28 OVERALL= 5.97 V-DG RMS = 5.97 LOAD = 100.0 RPM = 2984. (49.74 Hz) 0 100 200 300 400 500 0 1 2 3 4 5 6 7 Frequency in Hz R M S Ve lo ci t y in m m /Se c A A=1XRPM Freq: Ordr: Spec: 49.74 1.000 5.849 Gambar 4.4 Spektrum
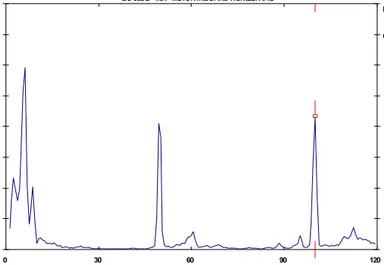
Gambar di bawah menujukkan perbesaran dari pemetaan spektrum gambar 4.4
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
Route Spectrum 26-Aug-06 08:16:28 OVERALL= 5.97 V-DG RMS = 5.92 LOAD = 100.0 RPM = 2984. (49.74 Hz) 0 30 60 90 120 0 1 2 3 4 5 6 7 Frequency in Hz R M S V elo ci t y in m m /S ec A A=1XRPM Freq: Ordr: Spec: 49.74 1.000 5.849
Perbesaran pemetaan spektrum bertujuan untuk memastikan frekuensi
yang membentuk puncak spektrum. Pada spektrum diatas terlihat jelas puncak
spektrum pada frekuensi 49,74 Hz (2964 Rpm) atau dalam istilah analisa getaran
disebut 1X Rpm.
Berdasarkan teori pada BAB II, unbalance membentuk spektrum pada 1X
Rpm maka dapat disimpulkan bahwa pada pompa tersebut mengalami kasus
unbalance.
4.3 Analisa Waveform
Dalam analisa getaran selain melihat dari trending data dan spektrum juga
perlu analisa waveform. Analisa waveform bertujuan untuk mengklarifikasi dari
data spektrum yang ada atau dalam kata lain untuk crosscheck data. Data
waveform periode agustus 2005 sampai Agustus 2006 seperti ditunjukkan pada
gambar 4.5 dan 4.6
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
Time in mSecs Velocity in mm/Sec 0 100 200 300 400 500 600 700 800 5.82 -5.08 13-Aug-05 13:46 6.25 -6.91 23-Aug-05 08:51 5.62 -6.05 13-Sep-05 09:12 4.68 -5.82 11-Oct-05 10:40 5.45 -6.08 26-Oct-05 13:31
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
Time in mSecs Ve loc it y in mm/Se c 0 100 200 300 400 500 600 700 800 5.58 -6.69 08-Nov-05 10:44 6.70 -6.49 24-Dec-05 09:03 7.51 -6.09 13-Jan-06 08:54 7.95 -7.58 21-Feb-06 14:13 9.77 -9.16 26-Mar-06 14:02 11.4 -10.9 26-Aug-06 16:43
Gambar 4.6 Waveform PIH November 2005 sampai Agustus 2006
Analisa waveform dilakukan dengan mengambil salah satu waveform
yang terbesar amplitudonya dan diperbesar dengan memperpendek waktu, dengan
demikian bentuk gelombangnya menjadi lebih jelas seperti pada gambar 4.7
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
Route Waveform 26-Aug-06 08:16:28 RMS = 6.02 LOAD = 100.0 RPM = 2984. (49.74 Hz) PK(+) = 12.27 PK(-) = 10.82 CRESTF= 2.05 0 30 60 90 120 150 180 210 -12 -8 -4 0 4 8 12 Time in mSecs V e lo c it y in m m /S e c Time: Ampl: .789 6.760 Gambar 4.7 Waveform
Kemudian waveform tersebut dipetakan menurut waktu tiap terjadinya
satu gelombangnya. Pada gambar 4.8 menunjukkan bahwa gelombang terjadi
setiap 1X Rpm atau 49,74 Hz, hal ini menandakan terjadi kasus unbalance pada
pompa tersebut
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
Route Waveform 26-Aug-06 08:16:28 RMS = 6.02 LOAD = 100.0 RPM = 2984. (49.74 Hz) PK(+) = 12.27 PK(-) = 10.82 CRESTF= 2.05 0 30 60 90 120 150 180 210 -12 -8 -4 0 4 8 12 Time in mSecs V el o cit y i n m m /S ec Time: Ampl: 22.10 8.402 A=1XRPM A A A A A A A A A A A
Gambar 4.8 Waktu Tiap Gelombang pada Waveform
4.4 Rekomendasi Perbaikan
Berdasarkan analisa getaran dari data-data yang ada baik analisa trending,
spektrum maupun waveform, dapat ditetapkan bahwa pompa tersebut mengalami
unbalance. Perbaikan dilakukan dengan :
1. Cek kondisi impeller
2. Cek kelurusan poros
4.5 Data Setelah Perbaikan 4.5.1 Trending data
Setelah perbaikan amplitudo mengalami penurunan yang signifikan yaitu
dari 7,918 mm/s menjadi 2.018 mm/s seperti pada trending data pada gambar 4.9.
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
Trend Display of Overall Value -- Baseline -- Value: 1.495 Date: 06-Jul-01 0 10 20 30 40 50 60 1 2 3 4 5 6 7 8 9
Days: 12-Oct-06 To 08-Dec-06
R M S V e lo c it y in m m /S ec Date: Time: Ampl: 19-Oct-06 09:17:51 7.918
Gambar 4.9 Trending Data Setelah Perbaikan
4.5.2 Spektrum
Data spektrum menunjukkan penurunan yang signifikan
R M S V el o ci t y i n m m /S ec Frequency in Hz
G-OX - REACTOR FEED PUMP A BG-106 A -PIH PUMP INBOARD HORIZONTAL
0 100 200 300 400 500 0 1 2 3 4 5 Max Amp 4.37 11:39:18 24-Oct-06 08:26:38 22-Oct-06 15:58:26 12-Oct-06 14:21:00 12-Oct-06
BAB V
KESIMPULAN
5.1 Kesimpulan
Analisa getaran mempunyai peranan yang sangat penting dalam perawatan
suatu mesin, dengan demikian akan berpengaruh juga terhadap efisiensi produksi.
Kerusakan suatu mesin akan menghabiskan waktu dan biaya yang besar jika
kerusakan tersebut tidak dideteksi lebih awal. Kasus unbalance atau masa tak
seimbang merupakan penyebab terbesar dalam kerusakan pompa sentrifugal.
Dari hasil pengambilan data vibrasi periode Agustus 2005 sampai dengan
Agustus 2006, diperoleh data terbesar yaitu 6,735 mm/s pada posisi PIH (Pump
Inboard Horizontal) dan sesuai dengan standar ISO 10816 – 1995 sudah masuk
dalam zona alarm. Setelah dilakukan analisa dari data yang diperoleh dengan
analisa spektrum dan analisa waveform maka dapat disimpulkan bahwa penyebab
kenaikan amplitudo vibrasi adalah unbalance ( masa tak seimbang).
Setelah dilakukan penggantian bagian- bagian yang mempunyai pengaruh
terhadap unbalance yaitu poros dan impeller, maka amplitudo vibrasinya turun
sangat signifikan dari 7,918 mm/s pada 19 Oktober 2006 menjadi 2.018 mm/s
pada 22 Oktober 2006. Dengan demikian pompa dapat dioperasikan kembali.
5.1 Saran
Dalam perawatan suatu peralatan, selain menggunakan metode preventive
dilakukan dengan predictive maintenance sehingga bisa diketahui kondisi
peralatan aktual dari hari ke hari sehingga jika terjadi ketidaknormalan peralatan
dapat di deteksi lebih dini. Salah satu sarana predictive maintenance adalah
analisa vibrasi.
Beberapa hal yang perlu diperhatikan dalam kegiatan analisa getaran
antara lain :
1. Menentukan tingkat kekritisan pompa untuk menetapkan jadwal
pengambilan data.
2. Menentukan sensor getaran yang dipakai
3. Pembuatan data base berdasarkan data sheet peralatan
4. Menentukan posisi pengambilan data pada setiap peralatan
5. Melakukan analisa dari data yang sudah diambil berdasarkan penyebab
dan tingkat keparahannya berdasarkan standar yang ada
DAFTAR PUSTAKA
1. Machinery Inspection and Evaluation. 2004. Jakarta : PT. Skefindo
Primatama.
2. Basic Vibration Training. 2005. Jakarta : PT. Tiara Vibrasindo Pratama
3. Advanced Vibration Training. 2007. Jakarta : PT. Tiara Vibrasindo Pratama
4. Dan B. Marghitu. 2001. Mechanical Engineer’s Handbook. Alabama :