1) Mahasiswa Jurusan Teknik Elektro UNDIP 2) Staf Pengajar Jurusan Teknik Elektro UNDIP
Sistem Regulasi Sudut Pitch dan Roll
pada Sistem Kamera Berbasis Kontrol PI
Duta Ardhana
1, Iwan Setiawan,S.T.,M.T.
2, Budi Setiyono,S.T.,M.T.
3 Jurusan Teknik Elektro, Universitas DiponegoroJalan Prof.H. Soedarto,S.H. Tembalang, Semarang
1[email protected];2[email protected];3[email protected]
Abstract — Visual monitoring system using camera is being used
in many fields such as building security system (bank/school/mall), movie industry, even military. Due to its wide applications comes needs of reliable and easy camera position control system. Accelerometer as a sensor that is able to measure an object acceleration, gives great opportunity in automatic camera tilt controlling and aslo camera position controlling through motion sensing.
Using earth gravity acceleration, we can calculate the tilt of an object by using Direct Cosine Matrix (DCM) method. In this research, DCM is applied in pitch and roll angle calculation to know and control tilt of camera. Accelerometer that is needed to do this sensing has low level acceleration range measurement about -3g to 3g. Through the tilt angle measured, the controlling of camera tilt is executed by servo motor which is embedded mechanically to pitch and to roll in range of -900 until 900. This system use proportional integration (PI) controller.
The research show good result whether the camera position can be maintained on the horizontal position when it’s getting a nuisance, a certain tilt angle. When pitch angle nuisance is given, servo motor can maintain camera on the horizontal position with average value of recovery time=0.925 second. When roll angle nuisance is given, servo motor can maintain camera on the horizontal position with average value of recovery time=0.975 second. When pitch and roll angle nuisance is given simultaneously, servo motor can maintain camera on the horizontal position with average value of pitch recovery time = 1.0625 second and roll recovery time roll = 1.1625 second. The controller system show best performance on Kp=0,5 and Ki=0.005.
Keywords
—
accelerometer, DCM, pitch, roll, Proportional Integral (PI).I. PENDAHULUAN
Kebutuhan akan sistem monitoring visual dengan menggunakan kamera sekarang ini sangat dibutuhkan di berbagai bidang. Keamanan gedung public seperti bank, sekolah, atau mal tidak luput dari peranan kamera CCTV. Kemudian industri perfilman yang sudah pasti menggunakan kamera untuk menghasilkan gambar-gambar berkualitas. Di samping itu, militer juga menggunakan kamera sebagai alat pengintai. Dengan aplikasinya yang begitu luas, dibutuhkan pula sistem kendali posisi kamera yang handal dan mudah digunakan. Sistem kendali yang umum dipakai pada kamera biasa disebut dengan Pan Tilt Zoom (PTZ). Pan merupakan pengendalian sudut yaw kamera. Tilt merupakan pengendalian kemiringan kamera baik berupa sudut pitch maupun roll.
Zoom merupakan pengendalian perbesaran gambar pada
kamera.
Accelerometer sebagai sensor yang mampu mengukur
percepatan benda memberikan peluang besar dalam pengendalian kemiringan (tilt) kamera secara otomatis dan juga pengendalian posisi kamera melalui pengindraan gerak (motion sensing). Hal itu dapat dilakukan dengan perhitungan percepatan gravitasi bumi dengan aturan DCM (Direct Cosine Matrix). Untuk mengukur kemiringan benda terhadap bumi, kita akan fokus pada perhitungan sudut gulung (roll) dan sudut angguk (pitch) suatu kamera.
Tujuan dari penelitian tugas akhir ini adalah merancang sistem regulasi sudut pitch dan roll pada sistem kamera berbasis kontrol PI. Hasil pengujiannya akan didapatkan dari seberapa baik kamera tetap bertahan dalam kondisi mendatar atau horizontal dan pada konstanta Kp dan Ki berapa dapat dihasilkan performa sistem yang terbaik.
II. DASAR TEORI
A. Accelerometer untuk Mengukur Sudut Kemiringan
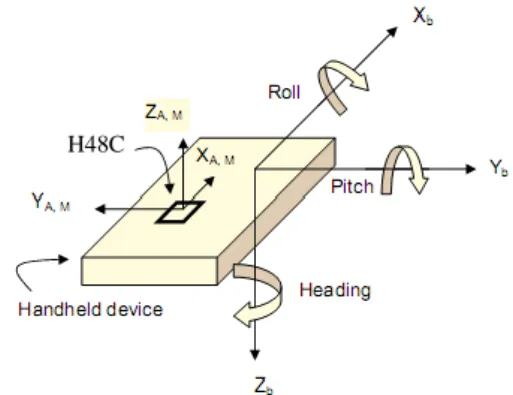
Dengan asumsi bahwa chip sensor accelerometer sudah tertanam pada suatu alat, seperti handphone, PDA atau pada papan PCB sebagaimana ditampilkan gambar 1.
Gambar 1 Sensor accelerometer Hitachi H48C Tertanam
Xb, Yb, dan Zb adalah aksis badan alat dengan konfigurasi maju-kanan-bawah. XA,M, YA,M, dan ZA,M merupakan aksis
pengindraan percepatan dan medan magnet sensor. Perlu dicatat bahwa tanda YA,M, dan ZA,M dari pengukuran sensor
butuh dibalik untuk membuat aksis pengindraan memiliki arah yang sama dengan aksis badan alat.
Sudut pitch/roll/heading disesuaikan kepada wahana horisontal lokal yang tegak lurus terhadap gravitasi bumi.
Heading ( ψ ) atau azimuth didefinisikan sebagai sudut berkenaan dengan gaya magnet kutub utara. Nilainya selalu positif dari 0 º hingga +359 º saat berotasi di sekeliling aksis Zb searah jarum jam tampak atas dengan kaidah tangan kanan. Jika heading berkenaan dengan utara
geografis dibutuhkan, maka sudut deklinasi pada lokasi geografis pemakai saat itu harus ditambahkan atau dikurangkan dari heading gaya magnet.
Pitch (ρ) didefinisikan sebagai sudut antara aksis Xb dan wahana horizontal. Dimulai dari 0 º hingga +90 º saat berotasi di sekeliling aksis Yb dengan aksis Xb bergerak naik. Saat akasis Xb bergerak turun, sudut pitch berubah mulai 0º hingga +90º.
Roll (γ) didefinisikan sebagai sudut antara aksis Yb dan wahana horizontal. Dimulai dari 0º to +90º saat berotasi di sekeliling aksis Xb dengan aksis Yb bergerak turun. Saat aksis Yb bergerak naik, sudut roll berubah mulai 0º hingga +90 º . Ax, Ay, Az merupakan hasil pengukuran mentah accelerometer. Tabel 1 menunjukkan definisi tanda data mentah sensor pada 6 posisi. Contohnya, pada gambar 1, Xb dan Yb sejajar, Zb menunjuk ke bawah. Oleh karena itu, Ax = Ay = 0, Az = +1g.
TABELI
DEFINISI TANDA PADA PENGUKURAN MENTAH SENSOR ACCELEROMETER
Stationary position
Accelerometer (signed integer)
Ax Ay Az Zb down 0 0 +1g Zb up 0 0 -1g Yb down 0 +1g 0 Yb up 0 -1g 0 Xb down +1g 0 0 Xb up -1g 0 0 Perhitungan pitch/roll
Saat alat berada pada posisi 3D X'b, Y'b, dan Z'b, ada sedikit prodesur rotasi untuk merotasikan alat dari bingkai tingkat lokal Xb, Yb, dan Zb, ditunjukkan pada gambar 1, kepada posisi 3D. Prosedur rotasi yang berbeda akan menghasilkan matriks rotasi yang berbeda pula. Konvensi pesawat terbang sudut rotasi digunakan pada catatan aplikasi ini.
Pertama, rotasikan alat genggam di sekeliling aksis Zb searah jarum jam pada sudut ψ dengan pandangan dari asal ke bawah. Lalu rotasikan alat genggam di sekeliling aksis Yb pada sudut ρ dengan Xb bergerak naik. Lalu rotasikan alat genggam di sekeliling aksis Xb pada sudut γ dengan Yb bergerak naik. Aksis badan alat yang baru menjadi X'b, Y'b, dan Z'b sebagaimana ditunjukkan gambar 2.
Gambar 2 Prosedur Rotasi
Kemudian masing-masing matriks rotasinya sebagai berikut:
1 0 0 0 cos sin 0 sin cos
R
cos 0 sin 0 1 0 sin 0 cos R
cos
sin
0
sin
cos
0
0
0
1
R
Dan hubungan antara X'b/Y'b/Z'b dan Xb/Yb/Zb adalah:
b b b I b I b I bZ
Y
X
R
R
R
Z
Y
X
b b b Z Y X cos cos sin cos sin cos sin sin sin cos sin cos sin cos sin sin sin cos cos sin cos sin sin cos sin sin cos cos cosPada wahana horizontal lokal, sebagaimana gambar 1, Xb = Yb = 0, Zb = +1g. Pada X'b/Y'b/Z'b, pengukuran mentah accelerometer adalah Ax, Ay, dan Az yang bertanda bilangan bulat dalam kaitannya dengan LSBs. Ax1, Ay1, dan Az1
menjadi nilai normalisasi setelah menerapkan parameter kalibrasi accelerometer pada Ax, Ay, dan Az. Jadi Ax1, Ay1,
dan Az1 menjadi nilai titik apung kurang dari 1 dalam
kaitannya dengan g (gravitasi bumi), dan akar kuadrat jumlah nilai kuadrat harus sama dengan 1 saat accelerometer diam. Kemudian persamaan di atas menjadi persamaan berikut:
1 0 0 cos cos sin cos sin cos sin sin sin cos sin cos sin cos sin sin sin cos cos sin cos sin sin cos sin sin cos cos cos 1 1 1 z y x A A A
Oleh karena itu, sudut pitch dan roll dapat dihitung sebagai berikut:
Pitch = ρ = arcsin(-Ax1)
Roll = γ = arcsin(Ay1/cos ρ)
Catatan:
Saat pitch = ±90º, roll harus di-set 0º untuk menghindari singularitas. Fungsi arcsin memiliki linieritas yang bagus antara -45º hingga +45º, jadi keakuratan derajat perhitungan pitch dan roll saat sudut kemiringan melebihi range ini. Pengukuran accelerometer ternormalisasi Az1 tidak digunakan
untuk perhitungan pitch dan roll. Tapi ini dapat digunakan untuk mengecek jika magnitude sama dengan 1. Jika tidak, maka artinya percepatan linier atau percepatan sudut terdeteksi.
B. Proportional Integral (PI) Controller
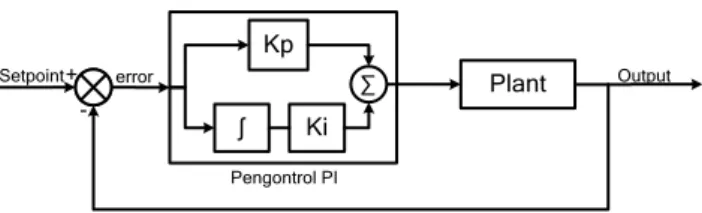
Suatu sistem dengan pengontrol PI diperlihatkan pada Gambar 3. Input suatu pengontrol PI adalah kesalahan (error) yaitu perbedaan antara variabel output dengan nilai variabel yang inginkan (setpoint). Sinyal kontrol dari pengontrol ini merupakan hasil kali suatu penguatan terhadap error, perubahan error dan hasil penjumlahan error dari proses.
.……...(1) .……...(2) .……...(3) .……...(4) ..(5) .………....(6) …..………....(7)
Plant Pengontrol PI Kp Ki ∫ ∑ Setpoint+ -error Output
Gambar 3 Blok Diagram Kontrol PI
Suatu pengontrol PI dapat dituliskan sebagai persamaan berikut, p
tedt T e K u 0 1 . 1dengan u adalah sinyal kontrol, e adalah kesalahan (error), de/dt adalah perubahan kesalahan dan Kp dan Ti berturut-turut adalah penguatan proporsional dan konstanta waktu integral.
Pengontrol PI merupakan gabungan dari 2 jenis pengontrol yaitu pengontrol proporsional dan integral. Penggabungan ini didasarkan atas perbedaan karakteristik dari tiap-tiap pengontrol sehingga diperoleh performansi pengontrol yang lebih baik.
Suatu pengontrol proporsional yang memberikan aksi kontrol proporsional dengan error akan mengakibatkan efek pada pengurangan rise time dan pengurangan pada kesalahan keadaan tunak (steady state error). Suatu pengontrol integral yang memberikan aksi kontrol sebanding dengan jumlah kesalahan akan mengakibatkan efek yang baik dalam mengurangi kesalahan keadaan tunak tetapi dapat mengakibatkan respon transien yang memburuk.
Pengetahuan tentang efek yang diakibatkan oleh masing-masing pengontrol tersebut yang nantinya akan digunakan dalam penentuan nilai-nilai penguatan proporsional (Kp), dan integral (Ki). Tabel basis pengetahuan hubungan antara penguatan dan efeknya pada pengontrol PI diperlihatkan pada Tabel 2.
TABELII EFEK PENGONTROL P DAN I Penguatan Rise
Time
Overshoot Setling Time Steady State Error Kp turun meningkat perubahan kecil menurun Ki turun meningkat meningkat menghilangkan
Dalam bentuk diskrit dengan menggunakan aproksimasi numerik integral error, e(k)=(e(k-1)+2e(k-1)+e(k-2))T, persamaan u di atas dapat ditulis menjadi
n i I I Pek K T i K k u 1 ) ( ) ( ) ( T k e k e k e T K k e K k u P I I ) 2 ( ) 1 ( 2 ) ( ) ( ) ( Dalam bentuk fungsi alih
s
T
Kp
s
G
1 01
1
)
(
dengan Kp adalah penguat proporsional dan Ti= Kp/K adalah konstanta waktu integral.
Penalaan pada pengontrol PI adalah penentuan besaran penguatan-penguatan P dan I sehingga diperoleh karakteristik sistem yang baik. Ada beberapa cara penalaan kontroler PID diatantaranya yaitu metode respon frekuensi Ziegler-Nichols,
trial-error, optimasi, pole placement, atau autotuning.
C. Accelerometer Hitachi H48C
Gambar 4 Sensor accelerometer H48C
Hitachi H48C adalah modul sensor accelerometer terintegrasi yang dapat merasakan gaya gravitasi dalam tiga buah sumbu angular (X, Y, dan Z). Chip ini berbahan silicon menggunakan teknologi MEMS(Micro Electro-Mechanical
System) yang memungkinkannya untuk digunakan secara
langsung tanpa perlu dikalibrasi. Pada modul ini terdapat regulator tegangan untuk mensuplai tegangan 3.3 volt untuk chip H48C, 12-bit ADC jenis MCP3204 untuk membaca tegangan keluaran dari chip H48C dan pengkodisi sinyal analog.
Gambar 5 Konfigurasi pin modul H48C
Data dari ketiga axis bisa didapatkan dengan cara melihat
channel .pada ADC internal yang digunakan untuk
menyimpan data tegangan masing-masing sumbu (axis). Pada modul sensor ini diketahui bahwa data dari masing-masing sumbu X, Y, dan Z terdapat pada channel 0, 1, dan 2. Selain ketiga sumbu tersebut pada modul ini juga terdapat data tegangan referensi (Vref), terdapat pada channel 3, yang digunakan sebagai perbandingan oleh masing-masing sumbu untuk mendapatkan nilai G.
Dari data sumbu (axis) dan Vref tadi bisa didapatkan. Besar nilai G dengan menggunakan persamaan dibawah ini:
G = ((axis – Vref) / 4095) x (3,3 / 0,3663)
Dimana nilai axis dan Vref didapatkan dari pembacaan data ADC, 4095 merupakan output maksimal dari 12 bit ADC, 3.3 adalah tegangan supplai H48C, dan 0,3363 adalah output tegangan untuk 1G (ketika beroperasi pada tegangan 3.3V). Persamaan tersebut dapat disederhanakan menjadi:
G = (axis – Vref) x 0.0022
D. Motor Servo
Berbeda dengan motor DC dan motor Stepper, motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol.
Gambar 6 Motor Servo
Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1.5 mS pada .………...……....(8)
.……..…....(9)
.………….…....(10)
……..(11)
periode selebar 2 mS maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam
Gambar 7 Teknik PWM untuk mengatur sudut motor servo
Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak kontinyu seperti motor DC maupun motor stepper. Walau demikian, untuk beberapa keperluan tertentu, motor servo dapat dimodifikasi agar bergerak kontinyu.
Gambar 8 Pin Out kabel Motor Servo
Pada robot, motor ini sering digunakan untuk bagian kaki, lengan atau bagian-bagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi cukup besar.
HS-325HB Standard Heavy Duty Servo memiliki gerigi-gerigi Karbon, yang setelah ratusan ribu siklus tidak akan menunjukkan tanda-tanda aus. Dengan torsi 49 in./oz. pada tegangan 6 Volts, HS-325HB merupakan pilihan yang bagus untuk pilot sport.
III. PERANCANGAN ALAT
Perancangan alat sistem regulasi sudut pitch dan roll ini dapat digambarkan dengan diagram blok sebagai berikut.
Plant Servo Sensor Accelerometer Pengontrol PI Kp Ki ∫ ∑ Ref=00 + -error Output Gangguan
Gambar 9 Diagram blok sistem regulasi sudut pitch dan roll
Nilai referensi yang diinginkan adalah 00. Ketika plant servo diberikan gangguan dengan dimiringkan baik dalam sudut pitch maupun sudut roll. Maka sensor accelerometer akan mendeteksi perbedaan nilai percepatan gravitasi pada tiap sumbunya, kemudian dengan menggunakan persamaan Direct
Cosine Matrix (DCM) akan diketahui sudut kemiringan sistem.
Nilai sudut kemiringan tersebut diumpanbalikkan, selisih antara nilai referensi dan sudut kemiringan yang dideteksi menghasilkan nilai error. Nilai error menjadi masukan bagi
pengontrol PI untuk memberikan sinyal control plant servo untuk melakukan gerakkan sehingga kamera kembali dalam kondisi datar.
A. Perancangan Perangkat Keras (Hardware)
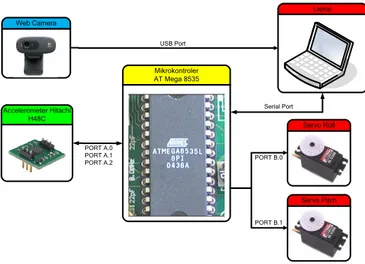
Secara umum perancangan Tugas Akhir ini meliputi perancangan sistem minium mikrokontroler ATMega 8535 dan perancangan sensor accelerometer Hitachi H48C. Perancangan perangkat kerasnya dapat dilihat pada gambar 10.
Laptop Accelerometer Hitachi H48C Servo Roll Mikrokontroler AT Mega 8535 Servo Pitch Web Camera PORT A.0 PORT A.1
PORT A.2 PORT B.0
PORT B.1 USB Port
Serial Port
Gambar 10 Diagram blok perancangan perangkat keras.
Tiap-tiap bagian dari diagram blok sistem pada gambar 10 dapat dijelaskan sebagai berikut :
1. Sensor accelerometer Hitachi H48C digunakan untuk mengetahui besarnya percepatan yang kemudian akan dikirim ke mikrokontroler.
2. Mikrokontroler ATMega 8535 digunakan untuk menerima data dari sensor, memproses data secara digital dan melakukan komunikasi serial antar mikrokontroler dan laptop.
3. Laptop digunakan menampilkan data percepatan, sudut kemiringan dan juga streaming gambar yang ditangkap webcam dengan menggunakan visual C#.
4. Webcam digunakan untuk menghasilkan video streaming dari objek yang direkamnya pada monitor laptop.
5. Motor Servo Roll merupakan plant untuk melakukan sudut gulung (roll)
6. Motor Servo Pitch merupakan plant untuk melakukan sudut angguk (pitch)
Detail perancangan sistem minimum mikrokontroler ATmega8535 dapat digambarkan sebagai berikut.
CLK DIO Vss Zero G CS Vdd +5 P A.0 P A.1 P A.2 A TM EG A 8 53 5 H 48 C P D.4 P D.5 +5 Accelerometer M M Roll Pitch RJ 11 USB Port
Sistem Minimum USB to RS232 Serial Converter RS232
Gambar 11 Alokasi port pada sistem minimum mikrokotroler ATmega 8535
Sensor accelerometer dihubungkan dengan 3 pin pada mikrokontroler, yaitu pada PINA.0, PINA.1, dan PINA.2 yang masing-masing berfungsi sebagai CLK, DIO, dan CS.
Motor servo memiliki 3 pin, pin pertama dihubungkan pada supply +5v, pin kedua dihubungkan pada ground, pin ketiga sebagai penerima sinyal untuk mengatur lebar pulsa, dihubungkan pada pin mikrokontroler. Servo yang berfungsi untuk melakukan gerak rolling dihubungkan pada PIN D.4, sedangkan servo yang berfungsi untuk melakukan gerak
pitching dihubungkan pada PIN D.5.
Untuk penghubungan serial dengan laptop/komputer digunakan USB to RS232 serial converter sebagai penyambung antara port RJ11 pada sistem minimum mikrokontroler dengan port USB pada laptop.
A. Perancangan Perangkat Lunak (Software)
Perangkat lunak yang digunakan pada penelitian ini terdiri atas 2 bagian, yaitu perangkat lunak pada mikrokontroler dan perangkat lunak pada komputer. Gambaran umum perangkat lunak sistem dapat dilihat dari diagram alir berikut.
Start
Ya Tidak
Inisiasi program
Menerima nilai Kp dan Ki yang baru Pembacaan Sensor Accelerometer H48C
Perhitungan Sudut Pitch dan Roll Memperoleh nilai error dari perbandingan sudut pitch dan roll
terukur dengan referensi (00)
Perhitungan sinyal kontrol (PI)
Motor servo bekerja Nilai Kp dan Ki tetap Nilai Kp dan Ki berubah Menerima protokol 0xFE Tidak Ya Matikan Sistem Stop Ya Tidak
Gambar 12 Diagram alir perangkat lunak sistem
Perangkat lunak pada mikrokontroler merupakan program yang ditanam untuk menjalankan fungsi utama alat ini mulai dari pembacaan sensor, perhitungan sudut kemiringan, pengontrolan sistem dengan kontroler PI, pengiriman data ke komputer untuk menampilkan data-data, hingga penerimaan perubahan nilai Kp dan Ki dari komputer secara serial. Adapun perangkat lunak pada komputer, fokus pada fungsi untuk menampilkan data sudut kemiringan secara grafik dan tabel angka, serta pengiriman perubahan nilai Kp dan Ki secara serial.
IV. PENGUJIAN DAN ANALISIS A. Pengujian Pengontrolan Posisi
Pengujian dilakukan dengan menguji kemampuan servo untuk mempertahankan posisi datar kamera ketika diberi gangguan dengan dimiringkan.
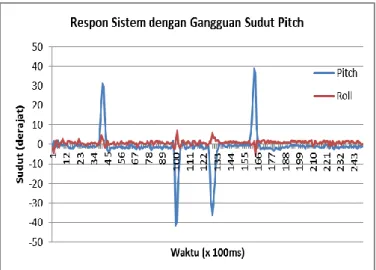
1) Pengujian Pengontrolan Posisi dengan Gerak Pitching
Pengujian dilakukan dengan memberikan gangguan berupa kemiringan sudut pitch dengan gerakan (1) posisi datar, (2) posisi sudut pitch positif, (3) posisi datar, (4) posisi sudut pitch negatif, (5) posisi datar. Dengan pengujian tersebut didapatkan hasil sebagaimana grafik berikut.
Gambar 13 Grafik Respon Sistem dengan Gangguan Sudut Pitch
Berdasarkan data yang didapat, maka dapat diamati bahwa alat ini mampu menjaga kestabilan kamera agar tetap dalam posisi datar dengan recovery time rata-rata = 0.925 detik.
2) Pengujian Pengontrolan Posisi dengan Gerak Rollling
Pengujian dilakukan dengan memberikan gangguan berupa kemiringan sudut roll dengan gerakan (1) posisi datar, (2) posisi sudut roll positif, (3) posisi datar, (4) posisi sudut roll negatif, (5) posisi datar. Dengan pengujian tersebut didapatkan hasil sebagaimana grafik berikut.
Gambar 14 Grafik Respon Sistem dengan Gangguan Sudut Roll
Berdasarkan data yang didapat, maka dapat diamati bahwa alat ini mampu menjaga kestabilan kamera agar tetap dalam posisi datar dengan recovery time rata-rata = 0.975 detik.
3) Pengujian Pengontrolan Posisi dengan Gerak Pitching dan Rollling sekaligus
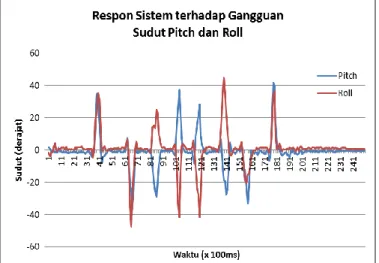
Pengujian dilakukan dengan memberikan gangguan berupa kemiringan sudut pitch dan roll dengan gerakan (1) posisi datar, (2) posisi sudut pitch positif dan roll positif, (3) posisi datar, (4) posisi sudut pitch negatif dan roll positif, (5) posisi datar, (6) posisi sudut pitch positif dan roll negatif, (7) posisi datar, (8) posisi sudut pitch negatif dan roll negatif. Dengan pengujian tersebut didapatkan hasil sebagaimana grafik berikut.
Gambar 15 Grafik Respon Sistem dengan Gangguan Sudut Pitch dan Roll
Berdasarkan data yang didapat, maka dapat diamati bahwa alat ini mampu menjaga kestabilan kamera agar tetap dalam posisi datar dengan recovery time pitch rata-rata = 1.0625
detik dan recovery time roll rata-rata = 1.1625 detik.
B. Pengujian Proportional Integral (PI) Controller
Pengujian Proportional Integral (PI) Controller dilakukan untuk mencari konstanta Kp dan Ki terbaik pada alat ini. Konstanta yang terbaik adalah yang mampu memberikan respon yang cepat, dengan overshoot yang kecil, dan error steady yang kecil.
1) Pengujian Nilai Kp Terbaik
Pada pengujian ini, dicari nilai konstanta Kp yang terbaik sehingga alat dapat mencapai set point dengan cepat dan overshoot yang kecil. Pengujian dilakukan dengan memberikan gangguan sudut positif roll 600. Kemudian dilakukan pengamatan pada grafik dengan variasi nilai Kp sebanyak 20 kali dari 0,1 hingga 2. Berikut adalah hasil respon sistem pada nilai Kp terbaik ketika diberi gangguan.
Gambar 16 Grafik Respon Sistem untuk Kp=0.5
Berdasarkan pengamatan grafik-grafik di atas, dapat diketahui bahwa nilai konstanta Kp terbaik dicapai pada nilai Kp=0.5, dimana responnya dalam mengembalikan posisi datar cukup cepat, recovery time rata-rata = 0.9 detik. Sedangkan overshootnya relatif kecil dan dapat diabaikan. Settling time tercapai lebih cepat karena tidak terjadi osilasi. Nilai error steady kecil dengan nilai error steady rata-rata=1,04710.
2) Pengujian Nilai Ki Terbaik
Pada pengujian ini, dicari nilai konstanta Ki yang terbaik sehingga alat dapat mencapai set point dengan cepat dan overshoot yang kecil. Pada pengujian ini, dicari nilai konstanta Ki yang terbaik sehingga alat dapat mencapai set point dengan cepat dan overshoot yang kecil. Pengujian dilakukan dengan memberikan gangguan sudut positif roll 600. Kemudian dilakukan pengamatan pada grafik dengan variasi nilai Ki sebanyak 20 kali dari 0,02 hingga 0,001 sedangkan nilai Kp tetap yaitu 0.5. Berikut adalah hasil respon sistem pada nilai Ki terbaik ketika diberi gangguan.
Berdasarkan pengamatan grafik-grafik di atas, dapat diketahui bahwa nilai konstanta Ki terbaik dicapai pada nilai Ki=0.005, dimana recovery time relatif cepat, mencapai nilai
recovery time rata-rata=1,8 detik namun overshoot kecil
dengan nilai overshoot rata-rata=14,350 dan error steady
relatif kecil dan dapat diabaikan. V. KESIMPULAN
Berdasarkan pengujian dan analisis yang telah dilakukan, maka dapat disimpulkan beberapa hal sebagai berikut: 1. Dari pengujian dengan gangguan sudut pitch, menunjukkan
bahwa alat ini mampu mempertahankan sudut pitch pada nilai 00 dengan recovery time rata-rata = 0.925 detik.. Ditunjukkan dengan kemampuannya memberikan gerak berlawanan arah dari sudut pitch yang dideteksi sensor accelerometer.
2. Dari pengujian dengan gangguan sudut roll, menunjukkan bahwa alat ini mampu mempertahankan sudut roll pada nilai 00 dengan recovery time rata-rata = 0.975 detik. Ditunjukkan dengan kemampuannya memberikan gerak berlawanan arah dari sudut roll yang dideteksi sensor accelerometer.
3. Dari pengujian dengan gangguan sudut pitch dan roll sekaligus, menunjukkan bahwa alat ini mampu mempertahankan sudut pitch dan roll pada nilai 00 dengan recovery time pitch rata-rata = 1.0625 detik dan recovery time roll rata-rata = 1.1625 detik. Ditunjukkan dengan kemampuannya memberikan gerak berlawanan arah dari sudut pitch dan roll yang dideteksi sensor accelerometer 4. Berdasarkan pengujian nilai Kp terbaik, dapat diketahui
bahwa nilai konstanta Kp terbaik dicapai pada nilai Kp=0.5, dimana responnya dalam mengembalikan posisi datar cukup cepat, recovery time rata-rata = 0.9 detik. Sedangkan overshootnya relatif kecil dan dapat diabaikan. Settling time tercapai lebih cepat karena tidak terjadi osilasi. Nilai error steady kecil dengan nilai error steady rata-rata=1,04710. 5. Semakin besar nilai Kp maka respon sistem semakin cepat
namun overshootnya relatif besar dan terjadi osilasi. Semakin kecil nilai Kp maka respon sistem lambat, error steady cukup besar, namun tidak terjadi overshoot dan osilasi yang signifikan.
6.Berdasarkan pengujian nilai Ki terbaik, dapat diketahui bahwa nilai konstanta Ki terbaik dicapai pada nilai Ki=0.005, dimana recovery time relatif cepat, mencapai nilai recovery time rata-rata=1,8 detik namun overshoot kecil dengan nilai overshoot rata-rata=14,350 dan error steady relatif kecil dan dapat diabaikan.
7. Semakin besar nilai Ki maka settling time semakin singkat, namun overshoot dan osilasi semakin besar. Semakin kecil nilai Ki maka settling time semakin lama, namun overshoot dan osilasi semakin kecil. Dengan adanya kontrol integrator ini, error steady yang dibentuk oleh nilai Kp sebelumnya dapat direduksi, hal ini dapat dilihat dari hasil grafik di mana menunjukan bahwa error steady ketika hanya menggunakan kontrol proposional lebih besar daripada ketika ditambahkan kontroler integral.
SARAN
Untuk pengembangan sistem lebih lanjut, maka ada beberapa saran yang dapat dilakukan yaitu sebagai berikut: 1. Penggunaan magnetometer untuk mengetahui derajat
kemiringan sudut yaw, sehingga ke depan alat ini dapat pula berotasi terhadap sumbu-Z.
2. Penggunaan filter-filter agar alat ini ke depan dapat digunakan dalam objek bergerak.
3. Penggunaan gyroscope untuk mengukur kecepatan sudut pada alat agar pembacaan percepatan dinamis pada alat dapat lebih akurat dan tidak terpengaruh dengan rotasi ekstrim yang terjadi pada alat. Sehingga hasil pengontrolan tetap baik meski dalam sudut ekstrim.
4. Penggunaan wireless untuk komunikasi data antara mikrokontroler dengan komputer, sehingga alat bisa digunakan lebih fleksibel dan penggunaannya dapat lebih jauh.
DAFTAR PUSTAKA
[1] Tuck, Kimberly, Tilt Sensing Using Linear Accelerometers, Freescale Semiconductor, 2007.
[2] Clifford, Michelle & Leticia Gomez, Measuring Tilt with Low-g Accelerometers, Freescale Semiconductor, 2007.
[3] Susilo, Tri Bagus, Pengukuran Sudut Kemiringan Benda dengan Sensor Percepatan, Teknik Elektro Undip, Semarang, 2011.
[4] Goh, A. H. W., Y. S. Yong, C. H. Chan, S. J. Then, L. P. Chu, S. W. Chau, and H. W. Hon, Interactive PTZ Camera Control System Using Wii Remote and Infrared Sensor Bar, World Academy of Science, Engineering and Technology 46, 2008.
[5] Chaturvedi, Abhishek, Accelerometer Supported Tilt as Input Method for Mobile Devices.
[6] Bejo, Agus, C & AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroler ATmega8535, Graha Ilmu, Yogyakarta, 2008.
[7] ---, Atmega8535 Data Sheet, http://www.ATmel.com, September 2010.
[8] ---, AN3192 Application Note, http://www.pololu.com/file/download/LSM303DLH-compass-app-note.pdf?file_id=0J434 , September 2010.
BIODATA PENULIS
Duta Ardhana (L2F007026), lahir di Semarang, 15 Juni 1990. Menempuh pendidikan di SD Pedurungan Tengah 02, SMP 2 Semarang, SMA 3 Semarang dan pada tahun 2007 melanjutkan studi strata 1 di Jurusan Teknik Elektro Universitas Diponegoro, Semarang, dan mengambil konsentrasi Teknik Kontrol.
Mengetahui dan mengesahkan, Dosen Pembimbing I Iwan Setiawan, S.T.,M.T. NIP.197309262000121001 Tanggal:____________ Dosen Pembimbing II Budi Setiyono, S.T.,M.T. NIP.197005212000121001 Tanggal:____________