Fakultas Ilmu Komputer
8305
Sistem Pengendalian Kecepatan Pada
Quadcopter
Dengan Menggunakan
Metode
Linear Quadratic Regulator (LQR)
Mesra Diana Tamsar1, Gembong Edhi Setyawan 2, Wijaya Kurniawan3
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Unmanned Aerial Vehicle (UAV) merupakan pesawat tanpa awak yang banyak digunakan oleh kalangan masyarakat. Salah satu jenis UAV adalah quadcopter. Quadcopter sering digunakan dalam berbagai bidang yaitu militer, industri dan lain-lain. Quadcopter memiliki empat buah rotor dengan kecepatan yang berbeda-beda untuk setiap rotor. Salah satu masalah yang ada pada quadcopter adalah mengendalikan kecepatan. Kecepatan quadcopter pada saat melakukan pergerakan tidak sama dengan kecepatan yang di tetapkan oleh pengguna. Hal ini dapat menyebabkan adanya keterlamabatan dan adanya kecelakan pada quadcopter. Penggunaan Linear Quadratic Regulator (LQR) diharapkan mampu untuk menstabilkan kecepatan. Langkah pertama yang dilakukan pada penelitian ini adalah melakukan perhitungan LQR yaitu dengan menentukan matriks A, B, C, D yang akan diimplementasikan pada
quadcopter. Tahap selanjutnya adalah melakukan input jarak pada untuk ditempuh oleh quadcopter.
Pengujian ini dilakukan dengan menguji kestabilan kecepatan untuk setiap jarak yang di input oleh user, serta tingkat ketepatan jarak yang ditempuh quadcopter. Jarak yang digunakan oleh user adalah 1m, 1.5m, 2m, 2.5m, dan 3m. Hasil pengujian yang telah dilakukan diperoleh hasil dengan tingkat ketepatan jarak yang ditempuh yaitu sesuai dengan jarak yang digunakan oleh pengguna dan untuk kecepatan juga tetap terlihat stabil untuk setiap jarak yang ditempuh. Waktu rata-rata yang dibutuhkan oleh quadcopter
untuk mencapai setiap jarak secara berurutan yaitu
1.2 detik, 2.43 detik, 2.07 detik, 3.35 detik dan
4.07 detik.
Kata kunci: quadcopter, linear quadratic regulator, kecepatan, jarak.
Abstract
Unmanned Aerial Vehicle (UAV) is an unmanned aircraft that is widely used by the community. One type of UAV is a quadcopter. Quadcopter is often used in various fields namely military, industry and others. Quadcopter has four rotor with different speed for each rotor. One of the problems on the quadcopter is controlling speed. The speed of the quadcopter at the time of movement is not the same as the speed assigned by the user. This can lead to the occurrence of friendship and the presence of accidents on quadcopter. Use of Linear Quadratic Regulator (LQR) to stabilize speed. The first step done in this research is to calculate LQR that is by determining matrix A, B, C, D which will be implemented in quadcopter. The next stage is to input the distance on to be taken by the quadcopter. This test is done by testing the stability of the speed for each distance in the input by the user, as well as the accuracy of the distance traveled quadcopter. The distance used by the user is 1m, 1.5m, 2m, 2.5m, and 3m. The results of the tests that have been done to obtain the results with the accuracy of the distance traveled is in accordance with the distance used by the user and for speed also remain stable for every distance traveled. The average time required by the quadcopter to reach any distance in sequence is 1.2 seconds, 2.43 seconds, 2.07 seconds, 3.35 seconds and 4.07 seconds.
Keywords: quadcopter, linear quadratic regulator, speed, distance.
1. PENDAHULUAN
Unmanned Aerial Vehicle (UAV) atau pesawat tak berawak yang banyak digunakan
oleh masyarakat. Salah satu jenis UAV adalah
industri, dan dibidang entertainment. Selain memiliki kelebihan quadcopter juga memiliki kekurangan atau kelemahan. Salah satu kelemahan yang dimiliki oleh quadcopter adalah pada pengendalian kecepatan, karena kecepatan yang ditetapkan pada quadcopter tidak sesuai atau tidak sama dengan yang ditetapkan.
Masalah ini dapat menimbulkan resiko yang fatal pada quadcopter yaitu adanya keterlambatan waktu dan kecelakan yang dapat merusak quadcopter. Salah satu penelitian yang berhubungan dengan sistem kendali kecepatan adalah pada robot inverted pendulum dengan menggunakan metode Linear Quadratic Regulator (LQR) yang dilakukan oleh (Ahmadi, 2018). Masalah yang ada pada penelitian ini adalah ketidakstabilan pada percepatan robot. Hasil yang diperoleh dari penelitian ini yaitu, metode LQR mampu mengatasi permasalahan yang dialami oleh robot. Penelitian kedua yang berhubungan dengan kecepatan adalah yang dilakukan oleh (Parlina, 2016) yaitu pengendalian kecepatan pada robot inverted pendulum dengan menggunakan metode fuzzy. Hasil yang diperoleh dari penelitian ini adalah metode fuzzy dapat mempertahankan keadaan seimbang pada robot, tetapi respon kecepatan robot yang dihasilkan mengalami overshoot atau keadaan ketika robot melakukan proses menyeimbangkan batang pendulum. Pada Ar Drone ada beberapa sensor yang akan digunakan untuk menghasilkan data yang dibutuhkan, salah satu sensor yang digunakan pada penelitian ini adalah sensor Interial Measurement Unit (IMU).
Sensor ini berfungsi sebagai sensor untuk menghitung percepatan dan arah pergerakan pada quadcopter.Tujuan dari penelitian ini adalah untuk mengendalikan kecepatan pada
quadcopter menggunakan metode LQR dan untuk mengetahui tingkat ketepatan jarak yang digunakan oleh user. Metode LQR ini merupakan suatu metode optimasi yang mampu meminimalkan suatu indeks untuk performa kerja sistem, dalam kondisi awal menuju suatu kondisi akhir (Sumanti, 2014)
2. MODEL QUADCOPTER
Model matematika pada quadcopter ini merupakan persamaan yang akan digunakan untuk kebutuhan pada sistem. Model matematik yang digunakan untuk quadcopter adalah menggunakan persamaan yang dikembangkan oleh kardono (2012) dan tomasso (2008), yaitu
Berdasarkan model persamaan diatas, persamaan berikutnya akan diubah menjadi sebuah fungsi. Persamaannya akan berubah menjadi fungsi sebagai berikut ini:
𝑥 = [𝜙 𝜙̇ 𝜃 𝜃̇ 𝜓 𝜓 ̇ 𝑥 𝑥̇ ]𝑇
Persamaan 1 dilakukan subsitusi dengan persamaan 6 akan menghasilkan matrik seperti dibawah ini:
3.
SISTEM
KONTROL
LINEAR
QUADRATIC REGULATOR (LQR)
Linear Quadratic Regulator (LQR) ini merupakan suatu sistem kendali yang digunakan sebagai metode dalam penelitian ini.
Untuk menganalisa suatu sistem, terlebih dahulu harus didapatkan persamaan (model matematika) dari sistem yang akan mewakili untuk kerja dari sistem tersebut. Dari persamaan tersebut kemudain akan direpresentasikan ke dalam persamaan ruang keadaan (state space) ( Novi, 2005).
Persamaan yang digunakan untuk mengendalikan sistem ini adalah sebagai berikut ini:
𝑥 = 𝐴𝑥 + 𝐵𝑢 𝑦 = 𝐶𝑥 + 𝐷𝑢
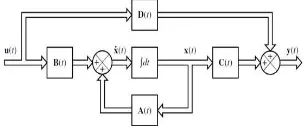
Persamaan diatad dapat dijadikan menjadi sebuah diagram blok seperti pada gambar 1 berikut ini:
Gambar 1 Diagram blok Persamaan ruang keadaan
Pada gamab 1 diatas merupakan
Prinsip metode LQR adalah memperoleh sinyal kendali optimal dari umpan balik keadaan (state feedback), dan hukum
pengendalian optimal
adalah:
𝑢(𝑡) = −𝐾𝑥(𝑡) (7)
Umpan balik 𝐾 adalah konstanta yang dihitung menggunakan persamaan aljabar Riccati, dari persamaan state space sistem dan untuk memeperoleh nilai K digunaka persamaan berikut:
Dan untuk meminimalkan cost function maka digunakan persamaan berikut ini:
𝐽 = ∫ (𝑥0 𝑡𝑄𝑥 + 𝑢𝑡𝑢𝑅)𝑑𝑡
∞ (9)
Di mana Q adalah matriks semi definit positif dan R adalah vektor variabel kontrol atau matriks definit positif, berdasarkan persamaan tersebut variasi parameter dari masalah perancangan LQR dapat di tentukan.
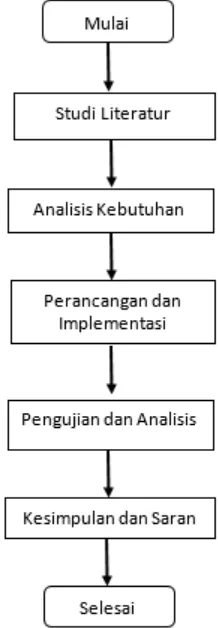
Gambar 2. Diagram Blok Metodologi Penilitian
Pada Gambar 2 dijelaskan tahapan metodologi yang akan digunakan pada penelitian ini yang meliputi studi literatur bertujuan untuk teori pendukung pada penelitian, analisis kebutuhan menejelaskan mengenai gambaran umum sistem, dan analisis kebutuhan sistem yaitu adanya kebutuhan perangkat keras, kebutuhan perangkat lunak, kebutuhan fungsional dan kebutuhan non- fungsional. Perancangan pada sistem ini dibagi perancangan komunikasi sistem dan perancangan Linear Quadratic Regulator (LQR). Pada perancangan komunikasi sistem dibagi menjadi 2 bagian yaitu perancangan antara ROS, Ubuntu dan gazebo dan perancangan antara ROS dan quadcopter AR Drone. Pada perancangan LQR akan dijelaskan mengenai perhitungan LQR untuk mengendalikan kecepatan pada quadcopter.
4.1.Perancangan Komuinikasi Sistem
Pada perancangan sistem ini, untuk memudahkan pemahaman terhadap perancangan sistem secara keseluruhan. Pada perancangan komunikasi sistem terdapat 2 jenis yang digunakan dalam penelitian ini, yaitu perancangan antara ROS, gazebo, Ubuntu dan perancangan antara ROS dan quadcopter. maka
dijelaskan dalam bentuk diagram blok sistem. Perancangan ROS, gazebo dan Ubuntu dapat dilihat seperti pada gambar 3, dan gambar 4.
Gambar 3. Perancangan ROS, gazebo, Ubuntu
Gambar 4. Perancangan ROS, Quadcopter
Pada gambar 3 merupakan perancangan antara ROS, Gazebo dan Ubuntu. ROS akan terhubung dengan gazebo melalui driver yang ada. Ubuntu digunakan sebagai platform untuk menjalankan ROS, Gazebo. Untuk komputer digunakan untuk menampilkan input dan outputyang ada melalui monitor. Sedangkan pada gambar 4 merupakan hubungan antara ROS dan
quadcopter. Untuk dapat mengirim data antara ROS dan quadcopter harus terhubung terlebih dahulu dengan menggunakan wi-fi. Quadcopter
4.2. Perancangan Linear Quadratic Regulator (LQR)
.
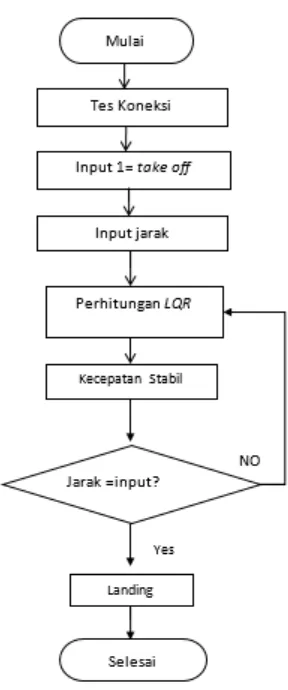
Gambar 5. Diagram Perancangan LQR
Seperti yang terlihat pada Gambar 5
quadcopter akan terlebih dahulu melakukan tes koneksi, selanjutnya dengan memberikan input
angka 1, quadcopter akan melakukan take off.
Setelah melakukan take off, user akan diberikan perintah untuk input jarak yang akan ditempuh oleh quadcopter. Tahap selanjutnya adalah adanya perhitungan LQR yaitu dengan melakukan inisialisai matriks yang akan digunakan pada sistem dan melakukan perhitungan matriks A, B, C, D, Q, dan R. Untuk memilih matriks Q, dan matriks R diperoleh
dengan menggunakan Bryon’s Rule berikut ini,
dengan melakukan trial and error dengan menguji 5 nilai yang berbeda.
𝑄𝑖𝑖 =
max 𝑎𝑐𝑐𝑒𝑝𝑡𝑎𝑏𝑙𝑒 𝑣𝑎𝑙𝑢𝑒 𝑜𝑓 𝑥
1
𝑖2
𝑅𝑖𝑖 =
1
max 𝑎𝑐𝑐𝑒𝑝𝑡𝑎𝑏𝑙𝑒 𝑣𝑎𝑙𝑢𝑒 𝑜𝑓 𝑈
𝑖25. PENGUJIAN DAN HASIL
Untuk menguji performa dari sistem ini, maka akan dilakukan pengujian terhadap ketepatan jarak yaitu dengan menggunakan jarak 1m, 1.5m, 2m, 2.5m, dan 3m dengan kecepatan yang stabil yaitu 1m/s.
5.1.
Pengujian Matriks Q Dan Matriks R
Pada Matlab.
Tujuan dari pengujian ini adalah untuk memperoleh nilai matriks Q dan matriks R.
Matriks Q dan matriks R diperoleh dengan melakukan trial and error berdasarkan persamaan (10). Untuk matriks Q dan matriks R
adalah sebagai berikut:
𝑄 = [
0.0005 0 0 0 0 0 0 0
0 0.0005 0 0 0 0 0 0
0 0 0.0005 0 0 0 0 0
0 0 0 0.0005 0 0 0 0
0 0 0 0 0.0005 0 0 0
0 0 0 0 0 0.0005 0 0
0 0 0 0 0 0 0.0625 0
0 0 0 0 0 0 0 0.0625]
𝑅 = [
0.1 0 0 0
0 0.1 0 0
0 0 0.1 0
0 0 0 0.1
]
Untuk hasil trial and error yang ada pada matlab adalah seperti gambar 6 berikut ini.
Gambar 6. Respon sinyal pada matriks Q dan matriks R
5.2.
Hasil Pengujian Ketepatan Jarak Tanpa menggunakan Linear Quadratic Regulator (LQR)Tujuan dilakukan pengujian ini untuk mengetahui apakah sistem sudah mencapai kesesuaian dengan perancangan yang telah dibuat dan quadcopter dapat memberikan output
yaitu ketepatan jarak sesuai dengan yang telah di
input oleh pengguna dengan kecepatan yang sesuai dengan yang digunakan oleh pengguna.
Untuk melihat hasil grafik kecepatan pada
quadcopter
dapat kita lihat p
ada Gambar 7,jarak yang telah digunakan. Jarak yang ditempuh oleh quadcopter selalu melebihi jarak yang diinginkan oleh pengguna. Dan untuk kecepatan terlihat tidak sesuai dengan kecepatan yang ditetapkan pengguna yaitu 1m/s.
Gambar 7. Pengujian seluruh jarak pada
quadcopter tanpa LQR.
Hasil dari persentase kecepatan pada
quadcopter tanpa menggunakan LQR tersebut dapat dilihat pada Tabel 1.
Tabel 1. Analisis ketepatan jarak tanpa LQR
5.3.
Hasil Pengujian Ketepatan Jarak Dengan Menggunakan Linear Quadratic Regulator (LQR)Tujuan dilakukannya pengujian ini adalah untuk mengetahui seberapa tepat jarak yang dicapai oleh quadcopter dengan menggunakan metode LQR dengan melakukan pengkuruan jarak pada quadcopter.
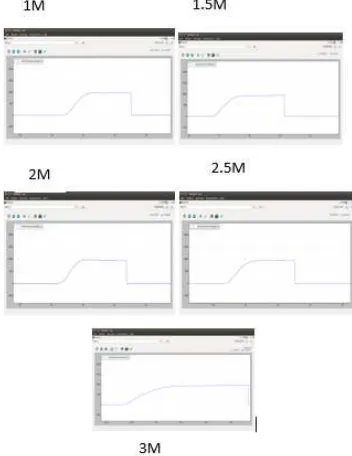
Untuk hasil grafik hasil pengujian kecepatan dengan menggunakan metode LQR
dapat kita lihat seperti pada gambar 8. Yang dimana pada gambar 8 terlihat bahwa
quadcopter dapat mencapai hasil yang sesuai
dengan perancangan. Tingkat ketepatan jarak yang ditempuh oleh quadcopter sesuai dengan jarak yang telah digunakan. Jarak yang ditempuh oleh quadcopter. Dan untuk kecepatan terlihat sesuai dengan kecepatan yang ditetapkan pengguna yaitu 1m/s.
Gambar 8. Pengujian seluruh jarak pada
quadcopter dengan menggunakan LQR
Hasil dari persentase ketepatan dan kecepatan yang telah dilakukan dalam pengujian dapat dilihat seperti table 2.
Tabel 2. Analisis ketepatan jarak dan kecepatan dengan LQR
6. KESIMPULAN
Berdasarkan berbagai analisis dari hasil yang diperoleh melalui pengujian yang dilakukan pada penelitian ini, maka dapat disimpulkan bahwa quadcopter dapat mencapai jarak yang ditentukan oleh pengguna dengan menggunakan metode Linear Quadratic Regulator(LQR), dan dengan kecepatan yang selalu sama untuk setiap pengujian yang dilakukan. Pada pengujian ini diperoleh hasil persentasi yang baik dalam setiap percobaan
yaitu dengan tingkat keberhasilan 100% untuk setiap jarak. Sedangkan untuk kecepatan yang ada juga terlihat persentasi yang sesuai dengan keinginan pengguna yaitu 100%.
7. DAFTAR PUSTAKA
Ahmadi. 2015. Sistem kestabilan robot inverted pendulum menggunakan metode linear quadratic regulator. Politeknik Negri Malang
Anggraini, Novi. 2005. “Desain Kontroler Menggunakan Metode Linear Quadratic Regulator (LQR) untuk Pengontrolan Suhu Uap pada Solar Boiler Once Through Mode”. Skripsi. Jurusan Tekinik Elektro, Fakultas Teknik, Universitas Brawijaya Malang. Kardono, Rusdhianto, EAK. Fatoni, A. 2012.
Perancangan dan Implementasi Sistem Pengaturan Optimal LQR untuk Menjaga Kestabilan Hover pada Quadcopter. JURNAL TEKNIK ITS. 1 (1):F7-F13.