SISTEM HELM PINTAR UNTUK PESEPEDA
Berlin Susanto1, Meirista Wulandari2 dan Fahraini Bacharuddin3 1Jurusan Teknik Elektro, Universitas Tarumanagara, Jl. Let. Jend S. Parman No.1 Jakarta 11440
Email: [email protected]
2Jurusan Teknik Elektro, Universitas Tarumanagara, Jl. Let. Jend S. Parman No.1 Jakarta 11440
Email: [email protected]
3Jurusan Teknik Elektro, Universitas Mercu Buana, Jl. Meruya Selatan No.1 Jakarta
Email: [email protected]
ABSTRAK
ABSTRAK Sepeda adalah salah satu kendaraan yang cukup digemari untuk berolahraga. Minimnya jalur khusus sepeda di Jakarta membuat para pesepeda harus berbagi jalur dengan kendaraan lain. Alat ini mampu memberikan sistem lampu penerangan, pengereman dan indikator arah kepada pesepeda serta mendeteksi kendaraan yang berada di belakang pesepeda. Alat ini terdiri dari sebuah aplikasi Android dan dua buah modul terpisah yang terhubung ke smartphone Android pengguna melalui koneksi Bluetooth. Alat tersebut berupa switch arah untuk menyalakan lampu sein seperti pada sepeda motor dan sebuah helm sebagai pelindung kepala dan tempat menampilkan lampu-lampu indikator arah mau pun pengereman. Lampu indikator tersebut dipasang di helm. Pada smartphone Android, pesepeda harus terlebih dahulu meng-instal program Android yang dirancang agar sistem dapat berjalan dan mengirimkan pesan lokasi ke nomor tertentu jika pesepeda mengalami kecelakaan. Aplikasi dibuat dengan menggunakan aplikasi MIT App Inventor 2. Modul pemroses pada perancangan ini menggunakan Arduino Nano berbahasa pemrograman C. Pengujian dilakukan dengan memberikan input berupa arah melalui switch arah, mengubah jarak benda di depan sensor sebagai bentuk pengereman yang terjadi, dan melakukakan simulasi pada kondisi-kondisi yang dianggap sebagai kondisi pesepeda terjatuh. Pengujian berjalan dengan baik karena modul dapat menyalakan dan mematikan lampu sesuai dengan input yang diberikan, mendeteksi pengereman serta mampu mengirimkan pesan lokasi ke nomor ponsel yang diberikan oleh pesepeda melalui aplikasi pada smartphone. Kesimpulan yang dapat diambil yaitu batas kemiringan sepeda 48omaka dianggap pesepeda terjatuh, jarak maksimal benda
untuk mengaktifkan lampu peringatan adalah 2,58 meter dan jarak high-power LED untuk lampu penerangan 1 meter.
Kata kunci: Android, Arduino Uno, helm, sepeda
1. PENDAHULUAN
Sepeda merupakan salah satu alat transportasi yang cukup banyak digunakan. Sepeda terbagi menjadi dua yaitu sepeda konvensional dan sepeda listrik (Ahmad A., 2010). Sepeda konvensional bergerak dengan cara dikayuh. Sepeda listrik memiliki motor dan aki sehingga dapat digerakkan dengan cara memutar handle gas atau dengan cara dikayuh.
Jalur khusus sepeda adalah jalan yang dikhususkan untuk pengguna sepeda. Jalur tersebut biasanya terpisah dari jalan umum yang digunakan mobil atau sepeda motor. Jalur khusus sepeda masih sangat minim di Jakarta dan masih terdapat banyak jalan yang minim penerangan. Kondisi tersebut sangat rawan bagi pesepeda karena kebanyakan sepeda yang terdapat di Jakarta tidak dilengkapi dengan lampu penerangan.
Hal lain yang dapat memicu kecelakaan pada pesepeda adalah tidak adanya indikator yang diberikan ketika pesepeda akan berpindah jalur atau berbelok. Biasanya pesepeda memberikan isyarat dengan cara melambaikan tangan. Cara tersebut kurang efektif karena akan mengurangi keseimbangan sepeda dan dapat memperbesar kemungkinan terjadinya kecelakaan.
Untuk mengurangi faktor-faktor yang dapat menyebabkan kecelakaan bagi peseped, diperlukan suatu sistem untuk membantu pesepeda memberikan indikator arah dan sebagai lampu penerangan. Sistem tersebut digunakan untuk mengurangi kemungkinan terjadinya kecelakaan
yang diakibatkan oleh kondisi gelap dan tidak adanya indikator atau kurang efektifnya indikator yang diberikan ketika pesepeda akan berbelok atau berpindah jalur.
2. KAJIAN PUSTAKA
Sistem helm pintar bagi para pesepeda bertujuan untuk membantu pesepeda memberikan indikator bagi pengguna yang lain, sebagai lampu penerangan ketika pesepeda berada pada jalan yang minim pencahayaan dan bertujuan untuk mengirimkan pesan lokasi ke nomor tertentu ketika terjadi kecelakaan saat pengemudi dan sepeda terjatuh. Sistem ini juga dapat digunakan untuk mengukur intensitas cahaya, memberi masukan arah yang diberikan oleh pesepeda, memberitahu keberadaan objek di belakang pesepeda dan kecelakaan. Beberapa sensor digunakan untuk membaca nilai-nilai yang terdeteksi. Nilai tersebut digunakan sebagai parameter suatu kondisi.
Sensor cahaya digunakan untuk membaca intensitas cahaya yang terdeteksi kemudian merubahnya menjadi tegangan listrik. Sensor jarak digunakan untuk mendeteksi objek yang terdapat di belakang sepeda dan merubahnya menjadi data jarak untuk diproses. Input arah dideteksi dengan membaca nilai tegangan yang terhubung dengan modul pemroses. Sensor pengukur kemiringan sepeda dan sensor pendeteksi posisi helm digunakan untuk mendeteksi kecelakaan. Parameter yang digunakan untuk mendeteksi keadaan tersebut adalah kemiringan sepeda dan nilai pada sumbu x,y dan z yang terbaca pada sensor pendeteksi posisi helm. Sensor pengukur kemiringan sepeda harus dipasangkan pada handlebar sepeda sedangkan sensor pendeteksi posisi helm harus dipasangkan pada helm.
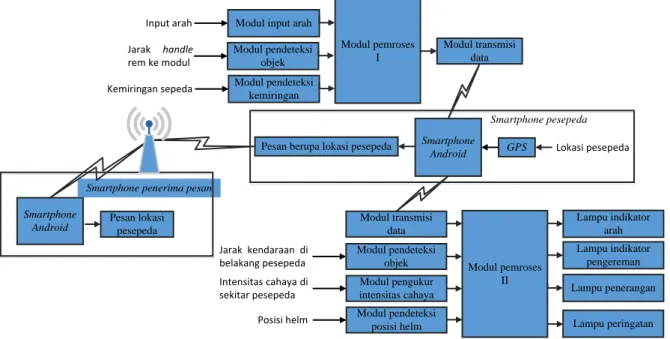
Jika pesepeda memberikan input arah, maka lampu indikator arah yang terdapat pada helm akan dinyalakan sesuai dengan input pesepeda. Lampu peringatan akan berkedip jika terdapat objek yang berada pada jarak tertentu di belakang pesepeda. Kecelakaan dideteksi ketika modul pendeteksi kemiringan sepeda dan modul pendeteksi posisi helm mendeteksi kondisi jatuh. Jika kedua kondisi terpenuhi, smartphone pesepeda akan mengirimkan pesan lokasi ke nomor tujuan yang telah ditentukan pesepeda. Hubungan antara sensor-sensor tersebut, aplikasi android smartphone dan lampu-lampu indikator dapat dilihat pada Gambar 1.
Modul pendeteksi objek Modul pemroses I Modul transmisi data Modul transmisi data Modul pemroses II Smartphone Android Pesan berupa lokasi pesepeda
Smartphone
Android Pesan lokasi pesepeda Lampu indikator arah
Modul pendeteksi objek
Lampu indikator pengereman Modul pengukur
intensitas cahaya Lampu penerangan Smartphone pesepeda
Smartphone penerima pesan
Modul pendeteksi posisi helm Modul pendeteksi
kemiringan Modul input arah
Lampu peringatan Input arah Jarak handle rem ke modul Kemiringan sepeda Lokasi pesepeda Posisi helm Intensitas cahaya di sekitar pesepeda Jarak kendaraan di belakang pesepeda GPS
Gambar 2. Arduino Nano v.3
Gambar 3. Logo Versi Android Sejak Awal Rilis Hingga Marshmallow
Arduino
Arduino adalah suatu papan yang memiliki mikrokontroler yang berukuran hampir sama dengan kartu kredit dan dilengkapi sejumlah pin yang dapat digunakan untuk berkomunikasi dengan perangkat lain. Arduino terdiri dari dua bagian utama yaitu board Arduino dan sebuah perangkat lunak atau Integrated Development Environment (IDE) yang dapat dioperasikan pada computer (Pratik D., 2015). Gambar Arduino (Arduino Nano v.3) dapat dilihat pada Gambar 2.
Bluetooth
Bluetooth merupakan salah satu media transmisi nirkabel yang dikembangkan untuk melengkapi kekurangan yang terdapat pada infrared. Bluetooth beroperasi di frekuensi 2,4 GHz unlicensed ISM (Industrial, Scientific, and Medical) dengan menggunakan frequency hopping transceiver yang mampu menyediakan layanan komunikasi data secara real-time. Bluetooth menyediakan koneksi point-to-point, point-to-multipoint dan mesh (Rau H., 2008).
MIT App Inventor 2
MIT App Inventor 2 adalah aplikasi yang awalnya dikembangkan oleh Google, namun saat ini dikelola oleh Massachusetts Institute of Technology (MIT). Aplikasi ini merupakan tools yang digunakan untuk membuat aplikasi Android yang berbasis web open source sehingga tidak diperlukan proses instalasi program tertentu. Aplikasi ini berbasis visual block programming sehingga user tidak diwajibkan menguasai suatu bahasa pemrograman tertentu untuk menggunakannya. Sebagai pengganti baris program, user melakukan pemrograman dengan melakukan drag-drops blok yang merupakan perintah dan fungsi event-handler tertentu (Derek W., 2014).
Android
Android adalah sebuah sistem operasi yang berbasis Linux yang awalnya dirancang untuk perangkat mobile seperti smartphone dan tablet yang bersifat open source. Android awalnya dikembangkan oleh Android.Inc. yang kemudian dibeli oleh Google. Bahasa pemrograman Java adalah bahasa pemrograman yang digunakan untuk membuat aplikasi Android (Creative Project, 2011). Android menggunakan logo robot berwarna hijau sebagai trademark-nya.
Sejak dirilis hingga sekarang, Android telah dirilis dalam beberapa versi dan yang terbaru adalah Android versi enam dengan codename Marsmallow dan yang masih dalam tahap pengujian adalah Android dengan codename Android N. Penamaan sistem operasi Android mengikuti abjad yang dimulai dari huruf C dan setiap nama sistem operasinya menggunakan nama dessert dan
memiliki logo yang berbeda-beda. Logo setiap sistem operasi Android dari versi awal hingga sekarang (Marshmallow) dapat dilihat pada Gambar 3.
Sensor Kemiringan
Sensor kemiringan adalah suatu sensor yang digunakan untuk mendeteksi kemiringan suatu objek. Sensor ini memiliki output yang berubah sesuai dengan nilai kemiringan yang terdeteksi oleh sensor. Salah satu jenis sensor kemiringan adalah roll ball switch. Switch ini memiliki dua buah bola yang digunakan sebagai penyambung dan pemutus tegangan. Kedua bola tersebut berada pada sebuah tabung silinder yang pada bagian bawahnya terdapat dua buah kutub elemen. Sensor akan menghasilkan nilai tertentu saat kedua bola dalam tabung mengenai kedua kutub elemen, sedangkan jika sensor dimiringkan hingga kemiringan tertentu dan mengakibatkan kedua bola tidak mengenai kedua kutub elemen, maka output sensor akan menjadi kebalikan dari nilai sebelumnya.
Sensor Jarak
Sensor jarak adalah sensor yang digunakan untuk mendeteksi jarak suatu objek terhadap sensor. Sensor jarak terbagi dua kelompok, yaitu sensor ultrasonik dan sensor infrared. Sensor ultrasonik mengukur jarak suatu benda dengan cara memancarkan kemudian menerima kembali gelombang ultrasonik yang dipancarkannya. Pada sensor ultrasonik terdapat transmitter dan receiver. Tranmitter digunakan untuk memancarkan gelombang ultrasonik secara berkala. Ketika gelombang yang dipancarkan menabrak suatu objek, maka gelombang tersebut akan dipantulkan kembali ke receiver yang terdapat pada sensor. Waktu pengiriman hingga penerimaan gelombang ultrasonik tersebut kemudian diolah oleh mikrokontroler pada sensor untuk menghasilkan jarak antara sensor dan objek. Gambar sensor jarak ultrasonik dapat diliihat pada Gambar 4.
Berbeda dengan sensor ultrasonik yang memanfaatkan pemancaran gelombang, sensor infrared bekerja dengan cara mendeteksi panas tertentu dari objek. Sensor infrared biasanya digunakan sebagai indra penglihatan pada robot.
Sensor Cahaya
Sensor cahaya adalah sebuah sensor yang digunakan untuk mendeteksi dan mengukur intensitas cahaya. Salah satu jenis sensor cahaya adalah Light Dependent Resistor (LDR) atau sering disebut fotoresistor. LDR adalah salah satu jenis resistor yang nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai resistansi LDR akan menurun saat terkena cahaya dan akan naik ketika pada kondisi yang kurang pencahayaan. LDR umumnya terbuat dari bahan semikonduktor cadmium sulfide.
Sensor Accelerometer
Sensor accelerometer adalah suatu sensor yang digunakan untuk mengukur percepatan suatu objek. Percepatan objek yang dimaksud dapat berupa percepatan dinamis maupun percepatan statis. Percepatan dinamis adalah percepatan yang terjadi pada objek yang bergerak, sedangkan percepatan statis adalah percepatan yang terjadi pada objek yang tidak bergerak (relatif terhadap gravitasi bumi). Sensor accelerometer mengukur percepatan berdasarkan gerakan yang terjadi pada tiga sumbu gerakan benda di tempat sensor ini melekat. Selain percepatan, sensor accelerometer juga dapat digunakan untuk mendeteksi kemiringan ataupun getaran. Sensor accelerometer terbagi dua yaitu sensor accelerometer digital yang bekerja berdasarkan temperatur dan sensor accelerometer analog yang bekerja berdasarkan sistem mekanik. Namun saat ini yang lebih banyak ditemui adalah sensor accelerometer digital.
Switch
Switch adalah salah satu komponen elektronik yang berfungsi untuk menyambung atau memutuskan aliran listrik dari suatu sumber tegangan ke beban.
Gambar 4. Sensor Jarak Ultrasonik Gambar 5. Modul Pengukur Intensitas Cahaya
3. REALISASI RANCANGAN
Realisasi ini terdiri dari beberapa modul. Beberapa modul tersebut adalah modul pengukur intensitas cahaya, modul pendeteksi posisi helm, modul pendeteksi objek, modul input arah, modul pendeteksi kemiringan sepeda, aplikasi android dan keseluruhan sistem.
Modul Pengukur Intensitas Cahaya
Modul ini digunakan untuk menyalakan dan mematikan lampu depan pada helm. Modul ini menggunakan LDR yang dihubungan secara seri dengan sebuah resistor sehingga membentuk suatu rangkaian pembagi tegangan. Nilai tegangan antara kaki resistor dan LDR dibaca kemudian dijadikan sebagai nilai referensi pengatur nyala atau tidaknya lampu penerangan. Modul ini dapat dilihat pada Gambar 5.
Modul Pendeteksi Posisi Helm
Modul ini bertujuan untuk mendeteksi kecelakaan yang terjadi. Modul ini memberikan nilai-nilai pada sumbu x, y dan z agar pesepeda dapat dianggap terjatuh. Modul ini menghubungkan MPU6050 dengan pemroses.
Modul Pemroses
Modul ini dibuat menggunakan software Arduino IDE berbahasa pemrograman C. Modul ini digunakan untuk mendeteksi input yang diterima oleh modul pemroses kemudian memberikan output tertentu. Output yang dimaksud adalah menyalakan lampu indikator dan mengirimkan data melalui bluetooth.
Modul Input Arah
Modul input arah dilakukan dengan menghubungkan Vcc pada modul pemroses ke three state switch. Switch ini digunakan sebagai media untuk menyiapkan data lampu indikator yang diaktifkan pada helm.
Modul Pendeteksi Kemiringan Sepeda
Modul ini bertujuan untuk mendeteksi kemiringan sepeda. Modul ini menggunakan SW-520D sebagai sensor kemiringan.
Aplikasi Android
Aplikasi MIT App Inventor ini digunakan untuk meneruskan data dari modul switch arah ke modul helm dan sebagai media untuk mengirimkan pesan lokasi ke nomor ponsel tertentu.
Keseluruhan Sistem
Keseluruhan sistem terbagi menjadi 2 modul utama yaitu modul switch dan modul helm. Modul switch arah dilakukan dengan menghubungkan modul pengukur intensitas cahaya, modul input
arah, modul pendeteksi objek, modul pendeteksi kemiringan sepeda dan modul pemroses. Modul-modul ini menyiapkan data-data yang dikirimkan ke modul helm melalui koneksi bluetooth pada smartphone Android. Data-data itu berisi informasi lampu indikator arah yang ingin diaktifkan, pengereman dan kondisi sepeda.
Modul helm dilakukan dengan menghubungkan modul pendeteksi posisi helm, modul pengukur intensitas cahaya, modul lampu indikator dan modul pendeteksi objek. Modul lampu indikator akan menyalakan lampu indikator berdasarkan data yang dikirimkan oleh modul switch arah. Ketika sepeda berada pada kondisi yang minim pencahayaan maka modul helm akan menyala. Jika objek berada di belakang pesepeda pada jarak tertentu, maka lampu peringatan akan dinyalakan. Jika modul pendeteksi helm pada modul helm dan modul pendeteksi kemiringan pada sepeda mendeteksi kecelakaan maka smartphone mengirimkan pesan lokasi ke nomor tertentu yang telah diatur oleh pesepeda.
4. HASIL PENGUJIAN DAN ANALISIS
Pengujian dan Analisis Modul Pengukur Intensitas Cahaya
Pengujian ini bertujuan untuk mengetahui intensitas cahaya pada kondisi pencahayaan yang berbeda-beda kemudian mengetahui nilai tegangan yang diterima oleh modul pemroses. Kemudian nilai tersebut digunakan sebagai referensi untuk menyala dan mematikan lampu penerangan secara otomatis. Hasil pengujian dapat dilihat pada Tabel 1. Tabel tersebut menunjukkan bahwa nilai tegangan yang terbaca pada modul pemroses semakin besar jika intensitas cahaya semakin tinggi. Hal tersebut sesuai dengan sifat resistansi LDR yang nilai resistansinya menurun ketika terkena cahaya dan meningkat ketika tidak terkena cahaya yang mengakibatkan perbedaan teganan yang terbaca pada modul pemroses.
Pengujian dan Analisis Modul Pendeteksi Posisi Helm
Pengujian ini bertujuan untuk mendapatkan nilai referensi pada sumbu x, y dan z yang dianggap sebagai kondisi jatuh pesepeda. Pembacaan nilai-nilai tersebut membutuhkan pin special purpose pada modul pemroses dengan interface I2C.
Pengujian ini dilakukan dengan menguji 4 posisi yang berbeda sebagai referensi posisi jatuh. Keempat posisi tersebut dapat dilihat pada Gambar 6. Hasil pengujian dapat dilihat pada Tabel 2. Nilai pengujian ini berada antara nilai -32768 hingga + 32767.
Tabel 2 menunjukkan bahwa modul hanya efektif digunakan saat kemiringin objek dengan modul berada di bawah 19o. Jika melewati kemiringan tersebut maka gelombang ultrasonik yang digunakan sebagai pendeteksi objek oleh sensor tidak akan langsung terpantul kembali ke sensor melainkan terpantul dahulu ke beberapa bidang sebelum kembali diterima pada modul. Pemantulan tersebut mengakibatkan kesalahan yang cukup besar. Pada pembacaan 10*, kesalahan pembacaan yang terjadi cukup besar karena jarak tersebut berada di luar jangkauan efektif pembacaan modul seperti yang tertera pada datasheet dan telah dibuktikan pada percobaan 9 (jarak deteksi maksimal 4 m).
Tabel 1 Pengujian Modul Pengukur Intensitas Cahaya
Pengujian Intensitas Cahaya (lux) Tegangan yang Terbaca pada Modul Pemroses (ADC)
1 19.9 668
2 127.4 922
3 3.8 260
4 0.9 44
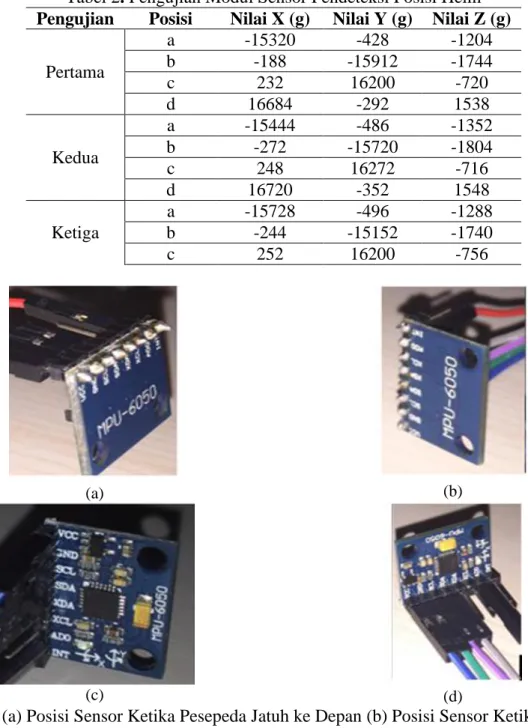
Tabel 2. Pengujian Modul Sensor Pendeteksi Posisi Helm
Pengujian Posisi Nilai X (g) Nilai Y (g) Nilai Z (g)
Pertama a -15320 -428 -1204 b -188 -15912 -1744 c 232 16200 -720 d 16684 -292 1538 Kedua a -15444 -486 -1352 b -272 -15720 -1804 c 248 16272 -716 d 16720 -352 1548 Ketiga a -15728 -496 -1288 b -244 -15152 -1740 c 252 16200 -756 (a) (b) (c) (d)
Gambar 6 (a) Posisi Sensor Ketika Pesepeda Jatuh ke Depan (b) Posisi Sensor Ketikan Pesepeda Jatuh ke Kanan (c) Posisi Sensor ketika Pesepeda Jatuh ke Kiri (d) Posisi Sensor ketika Pesepeda
Jatuh ke Belakang
Pengujian dan Analisis Modul Pemroses
Pengujian modul pemroses dilakukan dengan mengukur tegangan pada pin modul pemroses secara acak. Modul pemroses diprogram untuk menghasilkan kondisi HIGH atau LOW pada seluruh pin output. Pengukuran tegangan tersebut menggunakan multimeter dan sebuah LED sebagai indikator kondisi HIGH atau LOW. Hasil pengujian dapat dilihat pada Tabel 3 dan 4. Tabel 3 dan Tabel 4 menunjukkan bahwa modul dapat memberikan tegangan output yang mendekati tegangan yang tertera pada datasheet dengan resolusi ADC 10 bit. Setiap nilai dalam ADC 10 bit memiliki 5/(210-1) atau sama dengan 0.004887585532747 V. Jadi pada pengujian tersebut modul membaca nilai yang diberikan sebesar 3.52 V dengan kesalahan 0.22 V.
Tabel 3 Pengujian Pin Analog Input Modul Pemroses Pengujian Modul Pemroses Pin yang Diuji Tegangan yang Diberikan (Volt)
Tegangan yang Terbaca dalam Bentuk ADC
1 1 A7 5 1023 2 A3 5 1023 2 1 A1 0 0 2 A4 0 0 3 1 A2 3.3 720 2 A6 3.3 720 4 1 A5 5 1023 2 A0 0 0
Tabel 4 Pengujian Pin Digital Modul Pemroses
Pengujian Modul Pemroses Pin yang Diuji Kondisi yang Diberikan Tegangan yang Terbaca pada Multimeter (Volt) Kondisi LED 1 1 D1 HIGH 4.99 Menyala 2 D1 LOW 0 Padam 1 D1 HIGH 4.99 Menyala 2 D1 LOW 0 Padam 2 1 D6 HIGH 4.99 Menyala 2 D6 LOW 0 Padam 1 D6 HIGH 4.99 Menyala 2 D6 LOW 0 Padam 3 1 D8 HIGH 4.99 Menyala 2 D8 LOW 0 Padam 1 D8 HIGH 4.99 Menyala 2 D8 LOW 0 Padam 4 1 D12 HIGH 4.99 Menyala 2 D12 LOW 0 Padam 1 D12 HIGH 4.99 Menyala 2 D12 LOW 0 Padam 5 1 D13 HIGH 4.99 Menyala 2 D13 LOW 0 Padam 1 D13 HIGH 4.99 Menyala 2 D13 LOW 0 Padam
Pengujian dan Analisis Modul Input Arah
Pengujian modul input arah dilakukan dengan menghubungkan modul ini dengan modul pemroses. Terdapat 3 posisi tuas input yang diuji yaitu kiri, tengah dan kanan. Hasil pengujian modul input arah dapat dilihat pada Tabel 5. Tabel 5 menunjukkan bahwa data yang terdapat pada modul pemroses sama dengan data yagn seharusnya terbaca. Data L pada modul pemroses didapatkan jika posisi tuas berada pada posisi kiri sehingga salah satu pin pada modul pemroses yang terhubung dengan pin L modul input arah bernilai HIGH. Data R pada modul pemroses didapatkan jika posisi tuas berada pada posisi kanan sehingga salah satu pin pada modul pemroses yang terhubung dengan pin R modul input arah bernilai HIGH. Data N pada modul pemroses didapatkan jika posisi tuas berada pada posisi tengah sehingga pin pada modul pemroses yang terhubung dengan pin L maupun R pada modul input arah bernilai LOW.
Pengujian dan Analisis Modul Pendeteksi Kemiringan Sepeda
Modul ini diuji dengan menghubungkan pin output modul. Hasil pengujian modul sensor kemiringan untuk mengetahui nilai output modul pada kemiringan tertentu dapat dilihat pada Tabel 6.
Dari pengujian pada Tabel 6 dapat dikatakan modul sensor kemiringan bekerja dengan cukup baik. Hal ini dikarenakan output sensor relatif sama sampai dengan kemiringan 45o sesuai dengan spesifikasinya. Selain mendeteksi kemiringan, sensor ini juga mampu mendeteksi perubahan ketinggian. Dalam pengujian, ketika sensor mendapatkan guncangan secara vertikal, maka nilai output-nya berubah menjadi HIGH sejenak kemudian kembali menjadi LOW. Hal ini dikarenakan pergeseran bola logam yang terdapat pada sensor yang digunakan sebagai penyambung dan pemutus tegangan berdasarkan kena atau tidaknya kedua bola logam ke kedua kutub elemen pada sensor.
Tabel 5. Pengujian Modul Input Arah
Pengujian Posisi Tuas Modul
Input Arah Data yang Seharusnya Data pada Modul Pemroses 1 Kiri L L 2 Tengah N N 3 Kanan R R 4 Kiri L L 5 Tengah N N
Tabel 6. Pengujian Modul Pendeteksi Kemiringan Sepeda
Pengujian Kemiringan Bidang Output Modul 1 0o 0 2 15o 0 3 30o 0 4 45o 0 5 46 0 6 47 0 7 48 1 8 49 1 9 60o 1 10 75o 1 11 90o 1
Pengujian dan Analisis Keseluruhan Sistem
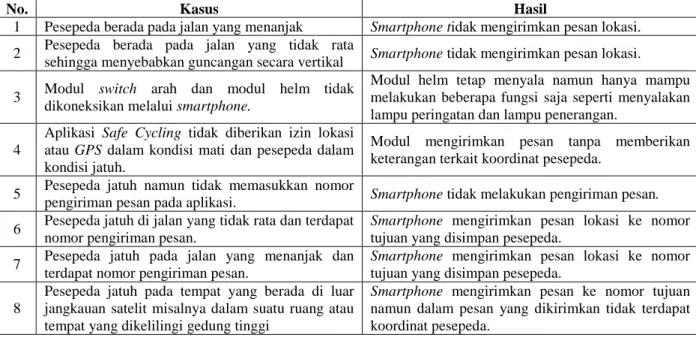
Pengujian keseluruhan sistem dilakukan untuk mengetahui kinerja keseluruhan sistem ketika seluruh modul yang digunakan telah diintegrasikan. Pengujian sistem dilakukan dalam bentuk kasus dan hasilnya dapat dilihat pada Tabel 10. Pengujian pertama dilakukan pada jalan yang menanjak sehingga helm seolah-olah berada pada posisi jatuh. Dalam kasus ini, hanya salah nilai saja yang terpenuhi yaitu posisi helm dalam kondisi jatuh, sedangkan posisi sepeda dalam keadaan normal sehingga sistem tidak mengirimkan pesan. Pengujian kedua dilakukan pada jalan yang tidak rata. Smartphone tidak mengirimkan pesan karena modul pendeteksi kemiringan pada sepeda hanya miring sesaat ketika terjadi guncangan vertikal. Pengujian ketiga dilakukan tanpa adanya komunikasi antara switch arah dengan modul helm. Modul helm hanya mampu menyalakan atau mematikan lampu penerangan dan lampu peringatan. Pengujian keempat
dilakukan dengan tidak memberikan izin lokasi. Hasil yang didapatkan adalah modul tetap dapat mengirimkan pesan tanpa memberikan keterangan terkait koordinat sepeda. Pengujian kelima, smartphone Android pesepeda mendapatkan perintah pengiriman pesan, namun pesan lokasi tersebut tidak dikirimkan. Hal ini dikarenakan pesepeda tidak memasukkan nomor pengiriman pesan pada aplikasi Android yang dibuat. Pengujian keenam dan ketujuh smartphone berhasil mengirimkan pesan lokasi ke nomor yang telah ditentukan. Hal ini dikarenakan baik sepeda maupun helm berada pada kondisi jatuh serta ada nomor pengiriman pesan pada aplikasi Android yang dibuat. Pengujian kedelapan, pesan lokasi berhasil dikirimkan ke nomor tujuan yang ditentukan oleh pesepeda. Koordinat pesan tidak disisipkan karena GPS sangat rentang terhadap interferensi. Umumnya, GPS efektif jika digunakan pada ruang yang terbuka. GPS pada ruang tertutup akan menyulitkan dalam penentuan koordinat.
Tabel 10. Pengujian Sistem Dalam Bentuk Kasus
No. Kasus Hasil
1 Pesepeda berada pada jalan yang menanjak Smartphone tidak mengirimkan pesan lokasi.
2 Pesepeda berada pada jalan yang tidak rata
sehingga menyebabkan guncangan secara vertikal Smartphone tidak mengirimkan pesan lokasi. 3 Modul switch arah dan modul helm tidak
dikoneksikan melalui smartphone.
Modul helm tetap menyala namun hanya mampu melakukan beberapa fungsi saja seperti menyalakan lampu peringatan dan lampu penerangan.
4
Aplikasi Safe Cycling tidak diberikan izin lokasi atau GPS dalam kondisi mati dan pesepeda dalam kondisi jatuh.
Modul mengirimkan pesan tanpa memberikan keterangan terkait koordinat pesepeda.
5 Pesepeda jatuh namun tidak memasukkan nomor
pengiriman pesan pada aplikasi. Smartphone tidak melakukan pengiriman pesan.
6 Pesepeda jatuh di jalan yang tidak rata dan terdapat nomor pengiriman pesan.
Smartphone mengirimkan pesan lokasi ke nomor
tujuan yang disimpan pesepeda. 7 Pesepeda jatuh pada jalan yang menanjak dan
terdapat nomor pengiriman pesan.
Smartphone mengirimkan pesan lokasi ke nomor
tujuan yang disimpan pesepeda. 8
Pesepeda jatuh pada tempat yang berada di luar jangkauan satelit misalnya dalam suatu ruang atau tempat yang dikelilingi gedung tinggi
Smartphone mengirimkan pesan ke nomor tujuan
namun dalam pesan yang dikirimkan tidak terdapat koordinat pesepeda.
5. KESIMPULAN
Kesimpulan yang dapat diambil dari sistem ini adalah:
a. Perintah pengiriman pesan ke smartphone Android pesepeda akan terlaksanakan jika kemiringan sepeda melebihi 48o dan pesepeda dalam kondisi terjatuh. Posisi jatuh pesepeda dideteksi ketika nilai yang terbaca sensor MPU6050 berada di luar rentang nilai -15000 hingga 16000 untuk sumbu X, 16000 hingga -15000 untuk sumbu Y.
b. Jarak maksimal benda atau kendaraan untuk mengaktifkan lampu peringatan adalah 258 cm dengan perbedaan sudut antara modul pendeteksi objek pada helm dengan benda harus lebih kecil dari 18o terhadap pesepeda agar tidak terjadi kesalahan pembacaan jarak.
c. Penggunaan high-power LED untuk menerangi objek dengan jarak di atas satu meter kurang direkomendasikan. Hal ini dikarenakan 20 lux merupakan intensitas penerangan minimum untuk ruang terbuka dan nilai tersebut hanya tercapai ketika high-power LED digunakan untuk menerangi objek yang berada satu meter di depannya.
DAFTAR PUSTAKA (DAN PENULISAN PUSTAKA)
Ahmad, A. Melihat Indonesia Dari Sepeda, Jakarta: Kompas, 2010.
Pratik D., Phyton Programing for Arduino, Birmingham: Packt Publishing Ltd, 2015. Rau H, Telecom Dictionary, Indianapolis: Wiley Publishing, Inc, 2008.
Derek W, “Learning MIT App Inventor”, Indiana: Pearson, 2014.