61
PENGGAMBARAN SISTEM KENDALI
Dalam bab ini akan dijelaskan penggambaran sistem kendali, yang meliputi fungsi alih (transfer function), korelasi antara fungsi alih dengan persamaan ruang keadaan, diagram blok, SFG, serta mencari fungsi alih dari suatu diagram blok (dengan cara reduksi diagram blok) maupun dari SFG (dengan dalil Mason).
3.1. Fungsi Alih
Fungsi alih digunakan untuk memudahkan melihat karakteristik suatu sistem, mengingat karakterisitik suatu sistem tak dipengaruhi oleh jenis input. Meskipun demikian, perlu diingat bahwa fungsi alih hanya berlaku untuk sistem linear, invariant waktu. Fungsi alih didefinisikan sebagai perbandingan antara fungsi Laplace output dengan fungsi Laplace input dengan semua kondisi mula dianggap nol.
Misalkan dinamika suatu sistem dinyatakan dalam persamaan differensial orde-n sbb:
) ( 1 ) 1 ( 1 ) ( 0 1 ) 1 ( 1 ) ( 0 y a y a y a y b x b x b x a x n m a n n m m n n n n (3-1) Semua kondisi mula sistem = 0, atau:
0 ) 0 ( ) 0 ( ) 0 ( ) 0 ( ) 0 ( ) 0 ( ) 1 ( ) ( ) 1 ( ) ( x x x y y y m m n n (3-2)
Maka fungsi Laplace Persamaan 3-1 dengan mengambil semua kondisi mula =0 adalah sbb: ) ( ] ... [ ) ( ] ... [ 1 1 1 0 1 1 1 0s as a s a Y s b s bs b s b X s a m m m m n n n n (3-3)
Dengan menganggap input = X(s), output = Y(s), maka fungsi alihnya adalah :
n n n n m n m m a s a s a s a b s b s b s b 1 1 1 0 1 1 1 0 0 mula kondisis semua X(s) Y(s) | [masukan] [keluaran] G(s) : Alih Fungsi L L (3-4)
Dalam penyederhanaan fungsi alih beberapa komponen yang terhubung secara seri, perlu diperhatikan apakah ada faktor pembebanan atau tidak. Bila komponen-komponen tersebut tidak saling membebani, maka fungsi alih total adalah perkalian dari masing-masing fungsi alih komponen-komponennya sebagaimana ditunjukkan pada Gambar 3-1.
Gambar 3-1: Fungsi alih 2 komponen yang terhubung seri tanpa terbebani
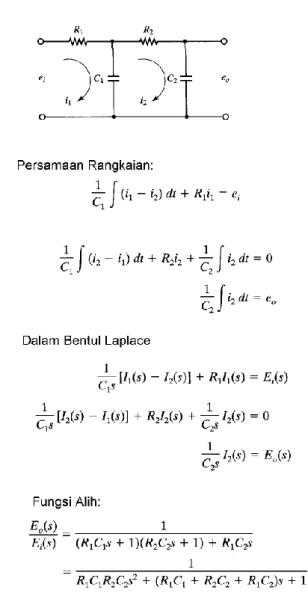
Pada rangkaian-rangkaian yang bersifat pasif, misalnya rangkaian elektrik pasif R,L dan C, masukan suatu rangkaian akan dirasakan sebagai beban oleh keluaran rangkaian sebelumnya yang terhubung pada masukan tersebut sebagaimana terlihat pada Gambar 3-2. Tingkat kedua rangkaian (R2C2) membebani tingkat pertama (R1C1). Pada kondisi seperti ini, maka fungsi alih keseluruhan tidak sama dengan perkalian fungsi alih kedua tingkat rangkaian, tetapi harus dihitung sebagai satu komponen.
Gambar 3-2: Fungsi alih 2 komponen yang terhubung seri dan terbebani
3.1.1. Sistem Mekanis Translasi
M f(t) D x(t) K M D x(t) f(t) K
Gambar 3-3: Dua sistem mekanis translasi.
f(t) = gaya (masukan)
Menurut hukum Newton dan hukum Hooke, maka dalam keadaan seimbang : f(t) Md x(t) dt D dx(t) dt K(t) 2 2 ... (3-5) Fungsi alih : TF X(s) F(s) ... (3-6) Transformasi Laplace dari Persamaan (3-5) adalah :
F(s) Ms X(s) DsX(s) KX(s) (Ms Ds K)X(s) 2 2 ... (3-7) Sehingga diperoleh: TF X(s) F(s) 1 Ms2 Ds K ... (3-8)
3.1.2. Sistem Mekanis Rotasi
J
T K
D
m
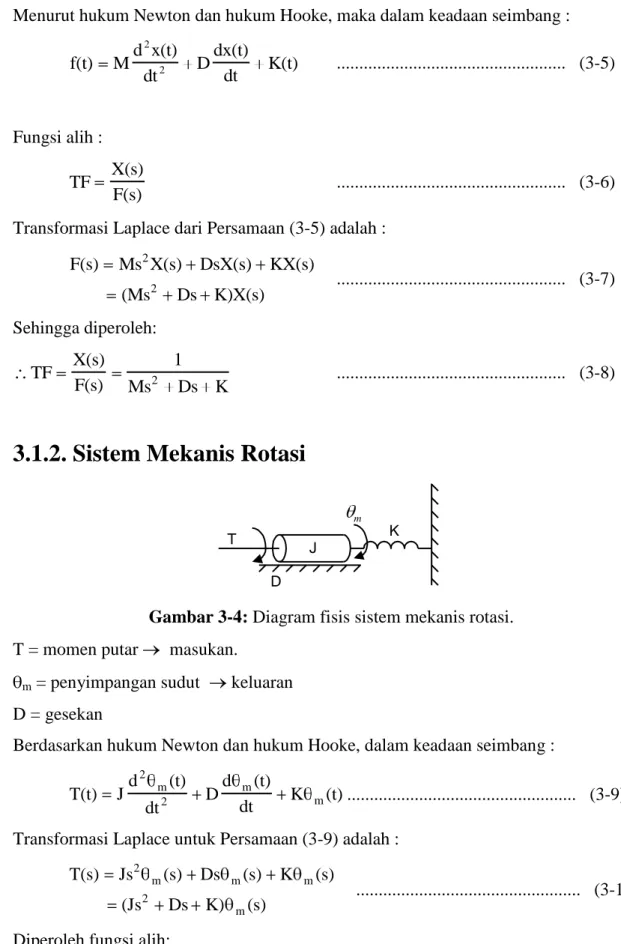
Gambar 3-4: Diagram fisis sistem mekanis rotasi.
T = momen putar masukan.
m = penyimpangan sudut keluaran D = gesekan
Berdasarkan hukum Newton dan hukum Hooke, dalam keadaan seimbang : T(t) Jd (t) dt D d (t) dt K (t) 2 m 2 m m ... (3-9)
Transformasi Laplace untuk Persamaan (3-9) adalah :
T(s) Js (s) Ds (s) K (s) (Js Ds K) (s) 2 m m m 2 m ... (3-10) Diperoleh fungsi alih:
TF (s) T(s) 1 Js Ds K m 2 ... (3-11)
3.1.3. Roda Gigi Mekanis
Roda gigi mekanis digunakan untuk menghubungkan antara motor dan beban dan untuk mengatur konstanta waktu , dari motor dan beban.
Motor D J T1 K N1 N2 Jm Dm T ,2 2 T ,m m masukan keluaran gir mekanis
Gambar 3-5: Sistem roda gigi mekanis.
Roda gigi mekanis mempunyai perbandingan gigi roda gigi :
N N
N 1 2
T1 = momen putar motor T2 = momen putar beban N1 = jumlah gigi roda gigi 1 N2 = jumlah gigi roda gigi 2 Jm = momen enersia motor J = momen enersia beban Dm = koefisien gesekan motor D = koefisien gesekan beban K = koefisien pegas beban Dalam keadaan seimbang :
Tm T1 (J sm 2 D s)m m ... (3-12) T2 (Js2 Ds) 2 ... (3-13) Misalkan jari-jari roda gigi 1 = r1 dan roda gigi 2 = r2, maka karena penyimpangan linier m r1 2 r2
Bila jumlah gigi berbanding lurus dengan jari-jari, maka
m N N m m N N N 1 2 1 2 2 2 2 ... (3-14)
Kerja yang dilakukan kedua roda gigi sama, maka
T1 m T2 2 T1 m T2 N m T1 NT 2 ... (3-15) Substitusikan persamaan (3-13), (3-14) dan (3-15) ke persamaan (3-12), didapat :
Tm [(Js2 Ds K)N2 (J sm 2 D sm )] m Sehingga fungsi alihnya:
TF Tm Js2 Ds K)N2 J sm D s) 2 m 2 1 2 N N ( ( ... (3-16)
3.1.4 Motor Arus Searah (DC) dengan Medan Konstan
beban mekanis rotasi K D m J Ia Ra La If konstan E i keluaran masukan
Gambar 3-6: Motor arus searah (DC) dengan medan konstan.
Medan : magnet permanen.
Medan konstan : arus konstan dengan tegangan jangkar variabel.
Ei = tegangan jangkar (masukan) If = arus medan (konstan)
Ra = tahanan jangkar (stator) m = posisi sudut beban (keluaran) La = induktansi jangkat (stator)
Ia = arus jangkar (stator)
Pada rangkaian jangkar (stator), didapat persamaan : Ei (Ra sL )Ia a e b
(Ra sL )Ia a Kb
(Ra sL )Ia a Kb s m ... (3-17)
Catatan : eb = back emf =Kb. Kb = konstanta back emf
Momen putar yang dihasilkan motor ideal :
Td Km I ; Ka m konstanta motor
Momen putar yang digunakan untuk menggerakkan beban yang terdiri dari J dan D serta K (mekanis rotasi),
Ta (Js2 Ds K) m
Dalam keadaan seimbang : Td Ta Km Ia (Js2 Ds K) m I (Js Ds K) K a 2 m m ... (3-18) Substitusikan persamaan (3-18) ke persamaan (3-17), didapat :
E (R sL )(Js Ds K) K K s (R sL )(Js Ds K K K K s K i a a 2 m m b m a a 2 m m b m m m ) TF = E K (R sL )(Js Ds K) + K K s m i m a a 2 b m ... (3-19) Dalam servo : K <<, R >> L sehingga E = K R Js Ds K bila K << E K R Js Ds K R s(Js D) sebut : K' K (R D) b a a m i m a 2 m i m a 2 m a m a dan m J D , maka E = K R D(J D K' m i m a m s 1)s s( s 1) ... (3-20)
3.1.5. Generator Arus Searah
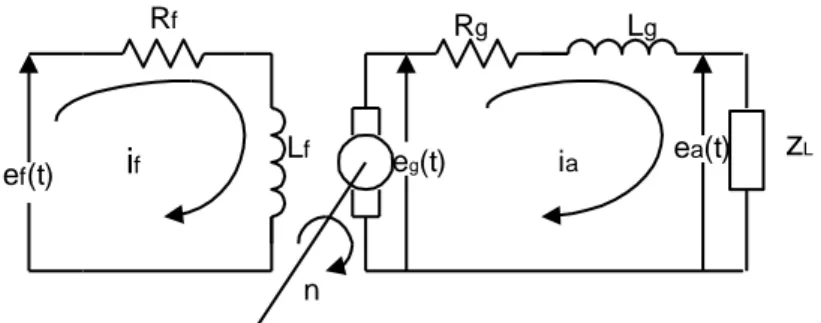
Generator DC sering digunakan dalam sistem kendali untuk penguatan daya. Jangkar, yang bergerak dengan putaran yang konstan memungkinkan untuk menghasilkan suatu arus jangkar ia yang relatif besar (yang dapat dikendalikan), dengan arus medan if yang berubah.
Rf Lf if eg(t) ea(t) Lg Rg ia ef(t) n zL
Gambar 3-7: Generator arus serah (DC).
Nilai ia tergantung pada impedansi rangkain beban ZL. Tegangan induksi dalam jangkar (eg(t)) adalah fungsi dari kecepatan putaran n dan fluks yang dihasilkan oleh medan, , sehingga
e (t)g K n1
Fluks tergantung pada arus medan dan karakteristik besi yang digunakan dalam medan, dan hubungannya dapat diekspresikan (dalam keadaan jenuh) sebagai berikut :
K2 if sehingga
e (t)g K K n i1 2 f
Bila diasumsikan kecepatan putaran jangkar konstan, maka
e (t)g Kg i f ... (3-21) dengan : Kg = K1K2n = konstantan generator [V/A]
Persamaan yang menghubungkan eg(t) dan if(t) adalah
e (t) R i L di dt f f f f f ... (3-22) dari persamaan (3 -12) i e (t) K f g g ... (3-23)
Substitusikan persamaan (3-23) ke persamaan (3-22), maka e (t) R K e (t) L K de (t) dt f f g g f g g Transformasi Laplacenya : E (s) R K E (s) L K sE (s) 1 K (R sL )E (s) f f g g f g g g f f g Fungsi alih : E (s) E (s) K R sL g f g f f K R L R s g f f f 1 bila K = K R g f dan g f f = L R , maka E (s) E (s) K 1 + s g f g ... (3-24)
3.1.6. Potensiometer
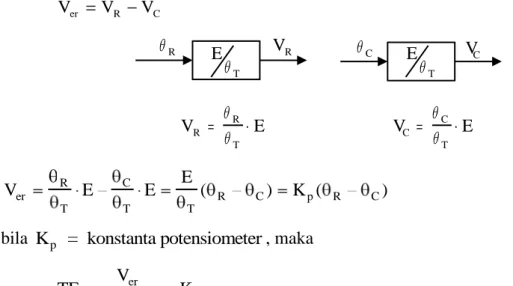
Mencari selisih posisi mekanis antara keluaran dan masukan.
E C VC R VR keluaran masukan Gambar 3-8: Potensiometer. R = simpangan masukan C = simpangan keluaran E = sumber tegangan DC
Ver = tegangan listrik yang dihasilkan karena adanya perbedaan simpangan masukan dan keluaran. Ver VR VC R T E T E R V C V C R R T V E C C T V E Ver R E E E Kp T C T T R C R C ( ) ( )
bila K = konstanta potensiometerp , maka
TF Ver Kp
R C
... (3-25)
3.1.7. Rangkaian Fasa Mundur (Phase Lag)
C e (t)o e (t)i R2 R1 i(t)
Gambar 3-9: Rangkaian fasa tertinggal.
Dalam Laplace : i(t) I(s) e (t) E (s) e (t) E (s) i i o o E (s) (R R 1 sC)I(s) E (s) (R 1 sC)I(s) i 1 2 o 2 TF E (s) E (s) o i
TF E (s) E (s) sCR 1 (R R )sC 1 o i 2 1 2 ... (3-26)
3.1.8 Rangkaian Fasa Maju (Phase Lead)
C
e (t)o
e (t)i R2
R1 i(t)
Gambar 3-10: Rangkaian fasa maju.
E (s) 1 sC 1 R R I(s) E (s) R I(s) i 1 2 o 2 TF = E (s) E (s) o i E (s) E (s) R R R 1 sCR 1 R R R R C o i 2 1 2 1 2 1 2 1 ... (3-27)
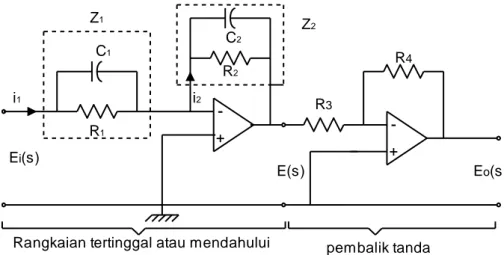
3.1.9.Rangkaian Elektronik Fasa Mundur/ Maju
-+ -+ Eo(s) E(s) Ei(s) R1 C1 R2 C2 R3 R4 i2 i1 Z1 Z2Rangkaian tertinggal atau mendahului pembalik tanda
Gambar 3-11: Rangkaian elektronik fasa mundur/ maju.
Fungsi alih rangkaian di atas dapat diperoleh seperti berikut. Sebut impedansi masukan Z1 dan impedansi Z2 sebagai
Z R R C s 1 dan Z R R C s 1 1 1 1 1 2 2 2 2
Arus yang mengalir ke penguat diabaikan, sehingga arus i1 i2 atau
E (s) E (s) Z E (s) E(s) Z i 1 2 karena E (s) 0, maka E(s) E (s) Z Z R R R C s 1 R C s 1 C C s 1 R C s 1 R C i 2 1 2 1 1 1 1 1 1 2 1 1 2 2
Tanda minus pada fungsi alih di atas memperlihatkan bahwa rangkaian di atas memiliki beda fasa antara input dan output sebesar 180o.
Fungsi alih dari pembalik fasa adalah E (s) E (s) R R o i 4 3
Fungsi alih keseluruhan adalah E (s) E (s) E (s) E(s) E(s) E (s) E (s) E (s) R R R R R C s 1 R C s 1 R C R C s 1 R C s 1 R C o i o i o i 2 4 1 3 1 1 2 2 4 1 3 2 1 1 2 2 E (s) E (s) K Ts 1 Ts 1 K s 1 T s 1 T o i c c ...……….. (3-28) dengan T R C ; T R C ; K R C R C 1 1 2 2 c 4 1 3 2 Perhatikan bahwa K R C R C R C R C R R R R ; = R C R C c 4 1 3 2 2 2 1 1 2 4 1 3 2 2 1 1 Rangkaian ini mempunyai penguatan dc, yaitu
K R R
R R c
2 4
1 3
Berdasarkan persamaan (3-19), rangkaian ini adalah rangkaian fasa maju jika R C1 1 R C2 2 atau < 1; dan rangkaian fasa mundur bila R C1 1 R C2 2.
3.2. Korelasi Antara Fungsi Alih dan Persamaan Ruang Keadaan
Fungsi alih : Y(s)
U(s) G(s) ... (3-29) Persamaan keadaan dan persamaan keluaran :
x Ax Bu ... (3-30) y= Cx+ u D ... (3-31) Transformasi Laplace dari persamaan (3-30) dan persamaan (3-31) :
Y(s) =CX(s) + U(s)D ... (3-33) bila x(0) =0, maka s (s) (s) U(s (s ) (s) U(s X AX B I A X B ) ) X(s) = (sI A)-1BU(s ) ... (3-34) Substitusikan persamaan (3-34) ke persamaan (3-33), maka
Y(s) = (s ) U(s U(s
= [ (s ) ]U(s) -1 -1 C B D C B D I A I A ) ) Fungsi alih : (s) U(s) = G(s) = (s ) -1 Y C I A B D ... (3-35)
Contoh 3-1 :
Perhatikan kembali contoh motor DC dengan arus medan If konstan sebelumnya. Persamaan keadaannya : x x 0 1 0 0 - B J K J -K L -R L + 0 0 1 L e (t) m m i m b a a a a a 0 Persamaan keluarannya : y = 1 0 0 x x x 1 2 3
G(s) =C I A(s - )-1 = 1 0 0 s 0 0 0 s 0 0 0 s 0 1 0 0 -B J K J -K L -R L + 0 0 1 L = 1 0 0 s - 1 0 0 s +B J K J m m i m b a a a a m m i B D 0 0 1 m b a a a a K L s + R L 0 0 1 L 0 1 sebut : x] = s - 1 0 0 s +B J K J K L s + R L = Adj[x] det[x] m m i m b a a a [ 1 1 0 x ( 1) s B J s R L K J K L x ( 1) x ( 1) x ( 1) s R L x ( 1) s s R L x ( 1) K L s 11 2 m m a a i m b a 12 3 13 4 21 3 a a 22 4 a a 23 5 b a 0 0 0 0 0 ( ) ( ) x ( 1) K J 0 31 4 i m
x ( 1) -K J s 0 x ( 1) s(s B J 32 5 i m 32 6 m m ) 0 0 det [x] = det s - 1 0 0 s + B J -K J K L s + R L = s s +B J s + R L K K J L s m m i m b a a a m m a a i b m a 0 [x] = s + B J s + R L + K K J L s + R L K J 0 s s + R L K J s K L s s + B J s s + B J s + R L K m m a a i b m a a a i m a a i m b a m m m m a a i 1 0 K J L s b m a G(s) = 1 0 0 s + B J s + R L + K K J L s + R L K J 0 s s + R L K J s K L s s + B J s s + B J s + R L K K m m a a i b m a a a i m a a i m b a m m m m a a i b 0 J L s 1 L m a a 0 0
G(s) = 1 s s + B J s + R L K K J L s s + B J s + R L K K J L s + R L K J 1 L G(s) = 1 s s + B J s + R L K K J L s K J L m m a a i b m a m m a a i b m a a a i m a m m a a i b m a i m a 0 0 ( ) ( ) ( ) G(s) = K s R L B J s B R K K J L s J L G(s) = K J L s J R B L s B R K K s i 3 a a m m 2 m a i b m a m a i m a 3 m a m a 2 m a i b
G(s) adalah fungsi alih dari sistem di atas.
Terlihat bahwa sistem di atas tidak memiliki zero, tetapi memiliki tiga buah pole, yaitu s = 0 s = J R B L 2J L J L B R J L K K 2J L s = J R B L 2J L J L B R J L K K 2J L m a m a m a m a m a m a i b m a m a m a m a m a m a m a i b m a ( ) ( ) J R J R m a m a 2 2 2 2 2 4 2 4
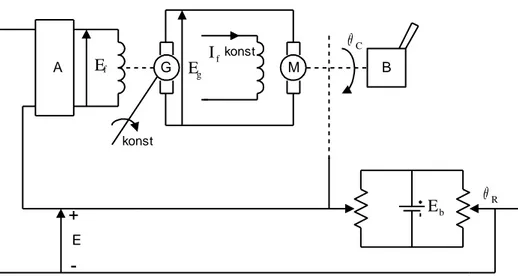
3.3. Diagram Blok
Diagram blok digunakan untuk menunjukkan gambar suatu sistem secara
lengkap, di mana fungsi masing-masing komponen masih tetap tampak. Tiap-tiap komponen digambarkan oleh sebuah blok (kotak) yang mempunyai masukan dan keluaran, sesuai dengan masukan dan keluaran dari komponen yang digambarkan. Di dalam kotak tersebut dituliskan fungsi alih dari komponennya. Hubungan dari beberapa blok dapat menggambarkan suatu sistem. Pada pembuatan blok, blok-blok dapat saja saling digabungkan untuk penyederhanaan, tetapi sifat sistem semula harus tetap.
A + -R b E M G f B I konst C g E Ef E konst
Gambar 3-12: Diagram fisis sistem kendali posisi laras meriam.
E +
-Motor DC Generator DC Amp Potensio-meter Detektor galat K s g g 1 C R E g Ef Kp K s(s m m 1) KaE +
-Detektor galat C R p K C TF : E R p K E K Ef a TF : E E K f a pada frekuensi rendah K s g g 1 Eg Ef TF : E E K s g f g g 1 C Eg K s(s m m 1) TF : E K s(s m g m m 1)Gambar 3-14: Blok-blok fungsional sistem kendali posisi laras meriam.
3.4. Signal Flow Graph
Diagram blok sangat berguna untuk menyederhanakan penggambaran dari suatu sistem kendali. Sedangkan signal flow graph (SFG) akan lebih menyederhanakannya lagi. SFG adalah sebuah jaringan yang terdiri dari simpul-simpul yang dihubungkan oleh cabang. Simpul menggambarkan variabel dari persamaan dan cabang-cabang menunjukkan arah mengalirnya sinyal dan besarnya penguatan (gain atau fungsi alih) sinyal dari satu simpul ke simpul lainnya, sehingga SFG ini merupakan diagram yang menggambarkan suatu kumpulan persamaan aljabar.
Contoh 3-2:
y c x1 x2 a b wGambar 3-15: SFG suatu sistem sederhana.
Dari Gambar 3-15, dapat diturunkan persamaan-persamaan berikut ini. w = ax1 + bx2
y = cw. ... (3-36)
dengan : x1, x2, w, dan y = variabel-variabel input output a, b, c = bilangan konstan atau fungsi alih
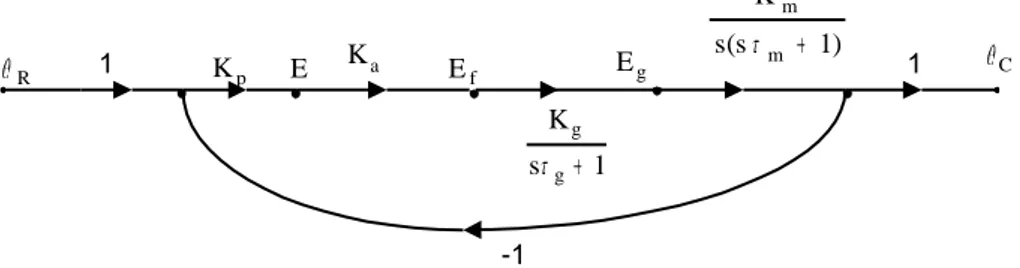
Sistem kendali posisi yang mempunyai diagram blok seperti Gambar 3-13, SFG-nya ditujukkan pada Gambar 3-16.
E K s g g 1 C R Kp Ka Ef Eg K s(s m m 1) 1 1 -1
Gambar 3-16: SFG sistem kendali posisi laras meriam.
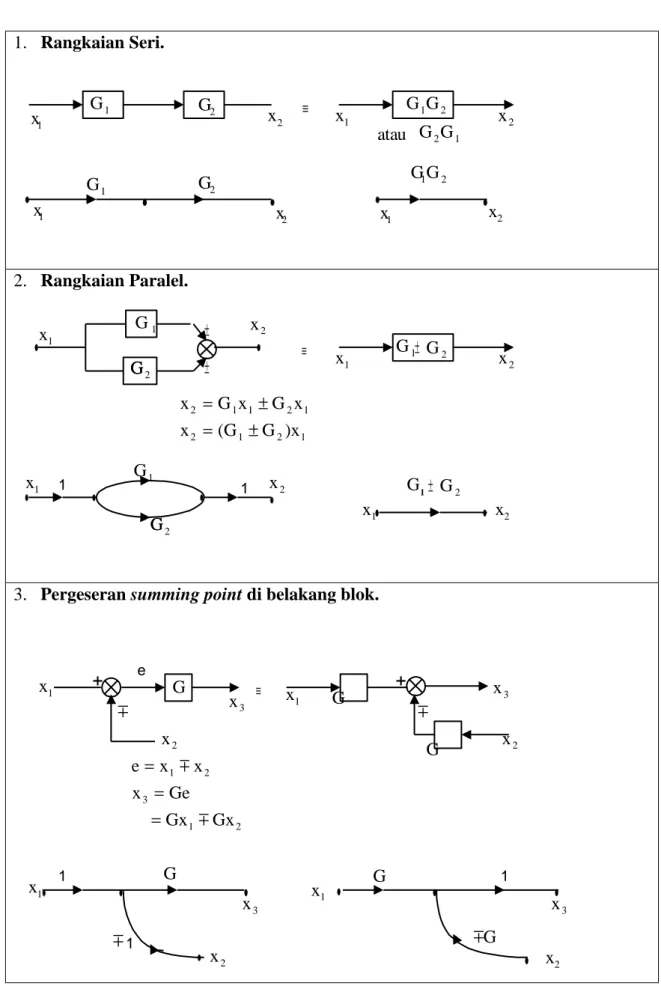
3.5. Penyederhanaan Diagram Blok dan SFG
Seringkali dijumpai diagram blok maupun SFG dari suatu sistem masih terlalu rumit untuk dianalisis secara langsung. Untuk memudahkan analisis, diagram blok maupun SFG harus disederhanakan lebih dahulu. Berbagai teknik penyederhanaan diagram blok / SFG dapat dilihat pada Tabel 3-1 berikut ini..
Tabel 3-1: Penyederhanaan Diagram Blok / SFG 1. Rangkaian Seri. G1 G2 G1 G G1 2 G2 atau G G2 1 G G1 2 x1 x2 x1 x2 x1 x2 x1 x2 2. Rangkaian Paralel. G x2 G1 1 1 x1 x2 G1 G2 G1 x G x G x x (G G )x 2 1 1 2 1 2 1 2 1 x1 x1 x2 x2 x1 G G2 G G2 G2 1
3. Pergeseran summing point di belakang blok.
G 1 1 3 x x1 x2 G G G 3 x 3 x + + e G x2 1 3 x e x x x Ge Gx Gx 1 2 3 1 2 G x1 x 1 x1 x2 x2
4. Pergeseran summing point di muka blok. x1 x1 G x2 1 1 x3 x1 x2 x1 x2 G 3 x 3 x + G x2 1 3 x + G 1 G x Gx x G x Gx 3 1 2 1 2 1 ( ) 1 G
5. Pergeseran pick-off point di belakang blok.
x1 G x2 1 x1 x2 x1 G G x1 x2 1 G x1 -1 x1 G x2 1 1 G -x Gx x 1 Gx 2 1 1 2
6. Pergeseran pick-off point di muka blok.
x1 G x2 x2 Gx1 x2 G G x1 x2 x2 x1 G x2 x1 G x2 1 G +1 1
7. Rangkaian umpan balik. x1 x2 G + e x2 H G 1 1 H x1 x1 x1 x2 x2 G GH 1 G GH 1 e x Hx x Ge G x Hx Gx GHx GH x Gx x G GH x 1 2 2 1 2 1 2 2 1 2 1 1 1
Contoh 3-3:
Reduksikan diagram blok berikut, bila :
a. blok K diisolasikan dalam arah maju (forward path), b. blok K tidak diisolasikan dalam arah maju.
Dan tentukan C(s)
R(s) dalam keadaan seperti itu.
0,1 s K C(s) R(s) 1 s 4 + +
-
-Gambar 3-17: Sistem dengan lup ganda Jawab :
a. K diisolasikan :
C(s) R(s) 1 s 4 +
s s 4 0,1 s 4 + K --K C(s) R(s) 1 s 4 + -+ s s 4 0,1 s 4 + K C(s) R(s) 1 s 4 + s 0,1 s 4 C(s) R(s) 1 s 4 K 1 s 4 K(s 0,1) R(s) K (1 K)s (4 0,1K) C(s) TF C(s) R(s) K (1 K)s (4 0,1K)Gambar 3-18: Tahapan penyederhanaan diagram blok untuk Gambar 3-17 dengan K
b. K tidak diisolasi : C(s) R(s) 0,1 + +
-
-
s 4 K s C(s) R(s) + -K (1 K)s 4 0,1 C(s) R(s) K (1 K)s (4 0,1K) TF C(s) R(s) K (1 K)s (4 0,1K)Gambar 3-19: Tahapan penyederhanaan diagram blok untuk Gambar 3-17 dengan K
tidak diisolasi.
Contoh 3-4:
Diketahui diagram blok seperti berikut. Tentukan outputnya C(s).
+ + +
-C(s) R(s) D(s) G (s)2 G (s)1Gambar 3-20: Diagram blok suatu sistem dengan sinyal gangguan
Jawab :
Untuk menentukan C(s) dalam sistem masukan banyak (multiple input), dilakukan dengan cara superposisi, yaitu membuat satu masukan aktif untuk satu saat tertentu, sedang yang lain dibuat = 0. Dari contoh ini, maka
Diasumsikan hanya ada R(s), sedang D(s) =0, +
-R(s) G (s)2 G (s)1 C (s)RGambar 3-21: Penyederhanaan diagram Blok Gambar 3-20 dengan mengabaikan
sinyal gangguan. C (s) R(s) G (s)G (s) 1 G (s)G (s) C (s) G (s)G (s) 1 G (s)G (s)R(s) R 1 2 1 2 R 1 2 1 2
Asumsikan hanya ada D(s), sedang R(s) = 0, maka :
+ + D(s) G (s)2 G (s)1 -1 C (s)D + D(s) G (s)1 G (s)2 -C (s)D
Gambar 3-22: Penyederhanaan diagram blok Gambar 3-20 dengan mengabaikan sinyal
masukan. + D(s) -1 G (s)1 G (s)2 C (s)D +
C (s) D(s) G (s) 1 G (s)G (s) C (s) = G (s) 1 G (s)G (s) D(s) C(s) = C s) C (s) = G (s)G (s) 1 G (s)G (s) R(s) G (s) 1 G (s)G (s) D(s) C(s) = G (s) 1 G (s)G (s) G (s)R(s) + D(s)) D 2 1 2 D 2 1 2 R D 1 2 1 2 2 1 2 2 1 2 1 ( (
3.6. Dalil Mason
Untuk menghitung penguatan sistem lup tertutup secara mudah dari sebuah SFG dipakai dalil Mason, sebagai berikut :
T
Tn n n 1
... (3-37) dengan :
Tn = fungsi alih dari arah maju ke-n. n = 1, 2, 3, ...
= determinan dari SFG, ditentukan sebagai berikut,
= 1 L1 L2 L3 L4 ertutup. lintasan t dari penguatan = L1 sebuah
L1 jumlah penguatan dari lintasan-lintasan tertutup .
L2 perkalian penguatan dari dua lintasan tertutup yang tidak saling bersinggungan ( tidak mempunyai titik persekutuan).
L2 jumlah semua kombinasi perkalian penguatan dari dua lintasan tertutup yang tidak saling bersinggungan.
L3 perkalian penguatan dari tiga lintasan tertutup yang tidak saling bersinggungan. …….dan seterusnya.
n kofaktor dari Tn.
yang menghasilkan Tn dihilangkan, termasuk lintasan tertutup yang menyinggungnya.
Contoh 3-5:
Tentukan fungsi alih C(s)
R(s) sistem dengan SFG berikut ini.
G5 G6 G4 G3 G2 G1 G7 G8 H7 H6 H3 H2 C(s) R(s)
Gambar 3-23: SFG suatu sistem kompleks
Jawab: T G G G G T G G G G L G H G H G H G H L G H G H G H G H L G H G H G H G H G H G H G H G H L G G H H G G H H G G H H G G H H L L 1 1 2 3 4 2 5 5 7 8 1 2 2 3 3 6 6 7 7 1 2 2 3 3 6 6 7 7 2 2 2 6 6 2 2 7 7 3 3 6 6 3 3 7 7 2 2 6 2 6 2 7 2 7 3 6 3 6 3 7 3 7 3 3 ; ; ; ; ; ; 0 0 1 2 1 1 2 2 1 1 1 1 1 ( ) ( ) ( ) ( ) ( ) ( G H G H G H G H G H G H G H G H G G H H G G H H G G H H G G H H C(s) R(s) T(s) T T G G G G G H G H G G G G G H G 6 6 7 7 2 2 3 3 2 2 3 3 6 6 7 7 2 6 2 6 2 7 2 7 3 6 3 6 3 7 3 7 1 2 3 4 6 6 7 7 5 5 7 8 2 2 3H G H G H G H G H G G H H G G H H G G H H G G H H 3 2 2 3 3 6 6 7 7 2 6 2 6 2 7 2 7 3 6 3 6 3 7 3 7 ) 1
Contoh 3-6:
Tentukan fungsi alih dari fungsi berikut :
G8 G7 G6 G5 G4 G3 G2 G1 C(s) R (s) - H3 - H4 - H2 - H1 1
Gambar 3-24: SFG suatu sistem dengan banyak lup
Jawab: 3 3 2 2 1 1 2 1 3 4 4 4 4 2 1 3 3 2 1 8 7 2 4 3 7 6 4 2 1 4 2 7 4 2 2 2 7 2 1 8 3 6 7 2 1 4 4 2 7 2 4 4 2 3 8 4 3 2 1 2 7 2 1 8 3 6 7 2 1 1 6 5 4 4 2 5 4 3 2 3 6 5 4 3 2 1 1 3 8 4 3 2 1 2 7 2 1 8 6 3 7 2 1 1 6 5 4 4 2 5 4 3 2 3 6 5 4 3 2 1 1 8 4 3 2 1 3 6 7 2 1 2 6 5 4 3 2 1 1 T T T R(s) C(s) T(s) L L 1 1 0 1 H G 1 ) H G ( 1 1 0 1 0 L 0 L H H G G G H H G G G G G H H G G G L H G G H G ; H G G G G H G ; H G G H G L H G G G G G H G G H G H G G G G H G G H G H G G G G H G G G G G G L H G G G G G ; H G G ; H G ; G H G G G ; H G G ; H G ; H G G G G ; H G G G G G G L G G G G G T G G G G T G G G G G G T
Contoh 3-7:
Carilah fungsi alih sistem dengan diagram blok berikut melalui: a. reduksi diagram blok
b. signal flowgraph. H3 G1 C(s) R(s) G2 G3 G4 H1 H2 a b + + +
-+-Gambar 3-25: Diagram Blok suatu sistem yang memiliki 3 lup
C(s) = G4.a a = C(s) G4 b = H2.a H2 . C(s) G4 = H G 2 4 C(s) a. Cara reduksi : H3 G1 C(s) R(s) G2 H1 + + +
-+ -G4 H2/
G4 G3 G3G4H3 G1 C(s) R(s) G2 +
-+ H2/
G4 G G3 4 1 G G H3 4 1 2 3 4 G G G 1 G G H3 4 1 H3 G1 C(s) R(s) + -G -G -G (1 G G H ) 1 ( G G G 1 G G H ) H G 2 3 4 3 4 1 2 3 4 3 4 1 2 4 G G G (1 G G H ) 1 G G H G G H 1 G G H G G G 1 G G H G G H 2 3 4 3 4 1 3 4 1 2 3 2 3 4 1 2 3 4 3 4 1 2 3 2 H3 C(s) R(s) + -G -G -G -G 1 G G H G G H 1 2 3 4 3 4 1 2 3 2Gambar 3-26: Tahapan reduksi diagram blok sistem pada Gambar 3-25.
C(s) R(s) G G G G 1 G G H G G H 1 ( G G G G 1 G G H G G H )H C(s) R(s) G G G G 1 G G H G G H G G G G H 1 2 3 4 3 4 1 2 3 2 1 2 3 4 3 4 1 2 3 2 3 1 2 3 4 3 4 1 2 3 2 1 2 3 4 3
b. Dengan signal flowgraph : b H2 H3 4 G G3 G2 G1 C(s) R(s) 1 1 H1
Gambar 3-27: SFG sistem pada Gambar 3-25
3 4 3 2 1 2 3 2 1 4 3 4 3 2 1 1 1 3 4 3 2 1 2 3 2 1 4 3 1 2 2 3 4 3 2 1 2 3 2 1 4 3 1 3 4 3 2 1 1 4 3 2 3 2 1 4 3 2 1 1 H G G G G H G G H G G 1 G G G G T R(s) C(s) H G G G G H G G H G G 1 1 0 1 0 L 0 L H G G G G H G G H G G L H G G G G ; H G G ; H G G L G G G G T