BAB III
PERANCANGAN DAN IMPLEMENTASI SISTEM
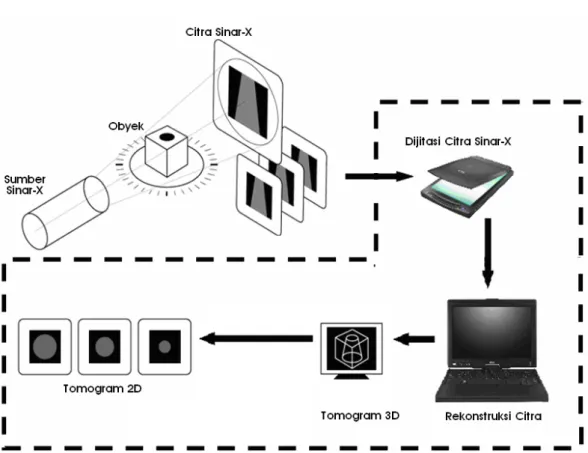
Pada bab ini akan dijelaskan aplikasi dan implementasi dari rancangan sistem, metoda, operasi dan algoritma yang digunakan dalam pengembangan sistem Sim CT. Teori dari metoda dan operasi pengolahan data pada sistem telah dijelaskan pada bab studi literatur. Sistem yang dirancang bertujuan untuk mengkaji potensi sistem ultrasound computed tomography dalam menghasilkan citra penampang melintang suatu objek.Bab Perancangan dan Implementasi Sistem ini diawali dengan penjelasan umum mengenai sistem yang dirancang, yaitu berupa blok diagram keseluruhan sistem, lalu dilanjutkan dengan pembahasan implementasi sistem yang berisi penjelasan mengenai spesifikasi sistem serta metoda dan algoritma yang digunakan untuk mengimplementasikan masing-masing bagian sistem tersebut. Pada bagian pengolahan data diberikan penjelasan mengenai diagram alir proses yang dilakukan, serta M-file MATLAB apa saja yang digunakan baik yang sudah disediakan MATLAB maupun yang dibuat sendiri.
3.1
Perancangan Sistem
Sistem yang dirancang bertujuan untuk mengaplikasikan sistem Sim CT untuk menghasilkan citra tiga dimensi volumetrik. Masukan sistem adalah citra sinar-X obyek, serta keluaran dari sistem adalah citra volumetrik tiga dimensi obyek. Citra volumetrik tiga dimensi tidak hanya memberikan informasi bagian permukaan obyek, tetapi juga memberikan informasi bagian dalam obyek. Apabila citra volumetrik ini dibelah akan didapatkan irisan penampang melintang obyek. .
Spesifikasi sistem yang digunakan terdiri dari : 1. Sumber sinar-X
2. Film sinar-X 3. Meja putar obyek 4. Obyek percobaan
5. Komputer untuk pengolahan data dengan spesifikasi : a. Perangkat keras : • Prosesor Pentium IV 1.6 Ghz • RAM 640 MB • Hard Disk 40 GB b. Perangkat lunak : • Microsoft Windows XP • MATLAB 7.0
Gambar 3.1 Sistem Simulated CT (Sim CT) ysng dibangun dalam penelitian ini
3.2
Implementasi Sistem
Implementasi sistem yang dirancang menggunakan perangkat yang telah disebutkan pada sub bab 3.1. Pada sub bab ini akan dijelaskan proses, metoda dan algoritma pada setiap bagian yang terdapat pada sistem. Pada bagian pengolahan data dengan MATLAB disajikan nama M-file yang ditulis untuk proses tersebut.
3.2.1 Sumber Sinar-X
Pengambilan data Sumber sinar-X yang digunakan dalam penelitian ini adalah sumber sinar-X miliki PT Dirgantara Indonesia. Sumber sinar-X ini biasa digunakan untuk kepentingan uji tak merusak. Dalam penelitian ini obyek yang digunakan adalah obyek benda mati, sehingga dosis sinar-X yang digunakan tidak menjadi masalah.
Berikut ini adalah spesifikasi sumber sinar-X yang digunakan dalam percobaan :
à Tegangan tabung sumber x-ray: 100 KV à Arus tabung : 5mA
à Exposure time : 30 detik
Gambar 3.2 Unit Kontrol Sinar-X
Karena dalam percobaan ini berkas sinar-X yang diperlukan adalah berkas kerucut, kolimator tidak diperlukan dalam percobaan.
3.2.2 Film Sinar-X
Dalam percobaan ini film sinar-X berfungsi sebagai detektor sinar-X. Film sinar-X disediakan bersama sumber sinar-X oleh PT Dirgantara Indonesia. Film ini berbentuk persegi panjang dengan ukuran kira-kira 40x10 cm. Satu lembar film dapat digunakan untuk beberapa kali penyinaran obyek yang kecil.
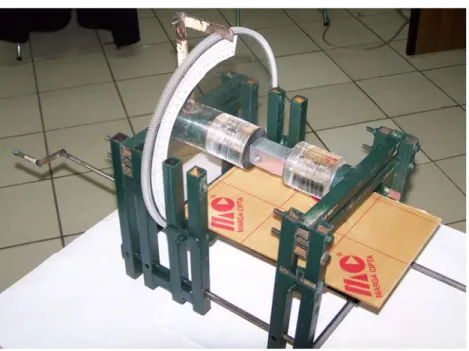
3.2.3 Meja Putar Obyek
Meja putar obyek merupakan perangkat yang dirancang untuk mengambil data redaman sinar-X yang melalui obyek. Metode pengambilan data umumnya bergantung pada jenis tomography yang digunakan. Dalam penelitian ini digunkan tomogaphy transmisi berkas kerucut. Teknik transmisi digunakan karena secara komputasi data hasil pemindaian lebih mudah untuk diolah. Umumnya tomography dengan sinar-X menggunakan. Parameter yang digunakan dalam CBCT ini adalah parameter redaman sinar-X. Seperti yang telah dijelaskan pad bab sebelumnya, tomography berkas kerucut memberikan kelebihan-kelebihan diantaranya kecepatan pengambilan data, pengurangan waktu radiasi, tidak membutuhkan dan tidak membutuhkan kolimator.
Meja putar ini dirancang oleh Herry Setiawan, ST. M.Si, (rekan peneliti dari Teknik Penerbangan). Meja putar ini dirancang sedemikina rupa agar mampu untuk memutarkan obyek dari sudut 00 hingga 3600 dengan kenaikan sudut minimum 10. Pergerakan meja putar ini diatur secara manual. Ke depannya meja putar ini diharapkan bisa diatur secara otomatis melalui sebuah work station yang juga berperan sekaligus sebagai perangkat keras rekonstruksi citra.
Gambar 3.3 Meja Putar Obyek
1. Penjepit obyek
Penjepit obyek ini dibuat dari bahan akrilik. Bahan ini dipilih karena koefisien redamnnya yang cukup kecil. Artinya, apabila sinar-X menembus akrilik, hanya sedikit sinar-X yang mengalami redaman. Penjepit obyek didesain berbentuk tabung dengan luas permukaan alas dan tutup yang cukup besar. Gunanya agar mampu menjepit obyek dengan baik. Disamping berperan sebagai penjepit obyek, komponen ini pun berperan sebagai pemutar obyek. Salah satu penjepit obyek, alasnya terhubung dengan meter pengukur rotasi. 2. Meter pengukur sudut rotasi
Meter pengukur rotasi ini memiliki dua peran : aktuator rotasi dan pengkukur sudut rotasi. Pengguna memutarkan obyek dengan memutar meter penguur rotasi ini. Pada meter pengukur rotasi terdapat gerigi yang merupakan skala sudut rotasi. Meter ini pun terbuat dari bahan akrilik yang sedikit meredam sinar-X.
3. Dudukan film
Dudukan film ini digunakan untuk meletakkan film-film sinar-X. Dudukan film ini memiliki slider agar mudah untuk memindahkan film yang telah teradiasi. Seperti pada kamera analog, film sinar-X yang digunakn di sini cukup panjang. Sebuah film dapat digunakan untuk beberapa kali penembakan. Film yang sudah terkena sinar-X digeser dengan bantuan slider. Hasilnya bagian film yang belum terkena sinar-X berada pada posisi tepat di bawah obyek dan siap diradiasi dengan sinar-X. Bagian film lain yang sudah atau belum tersinari ditutup dengan timbal dengan tujuan untuk melindungi film tersebut dari radiasi sinar-X.
3.2.4 Scanner
Untuk kepentingan digitasi sinar-X diperlukan sebuah scanner. Dalam percobaan ini digunakan scanner merk Canon 9900F. Scanner ini memiliki sensor 3200x6400 dpi dan warna 48 bit.
Gambar 3.4 Scanner
3.2.5 Obyek
Ada dua macam obyek yang digunakan dalam percobaan ini : obyek simulasi dan obyek phantom. Obyek simulasi yang digunakan berjumlah enam buah (gambar 3.5. (a)-(f)), sedangkan obyek phantom berjumlah satu buah (gambar 3-11).
Enam buah obyek pemindaian digunakan dalam simulasi pemindaian memiliki spesifikasi umum sebagai berikut:
1. Obyek diasumsikan berada di dalam ruang pemindaian tiga dimensi sebesar 63x63x31 voksel
2. Obyek diasumsikan homogen dengan intensitas voksel sebesar 1 3. Latar belakang diasumsikan memiliki intensitas voksel 0.1 4. Tebal obyek 11 voksel
(a) (b) (c)
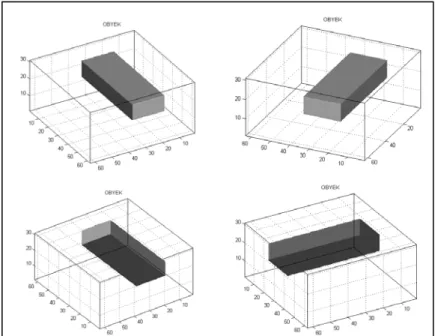
Gambar 3.5 Obyek Simulasi
Gambar 3.6 Obyek 1 dilihat dari berbagai perspektif
Obyek 1 ini merupakan obyek berbentuk balok padat. Bentuk balok pada mudah diketahui perkiraan hasil pemindaiannya. Dalam proses pembuatan simulasi pemindaian, perlu dipastikan bahwa simulasi tersebut menghasilkan citra Sinar-X yang benar. Dengan bentuk sederhana seperti ini, kesalahan dalam simulasi pemindaian dapat dideteksi dengan mudah.
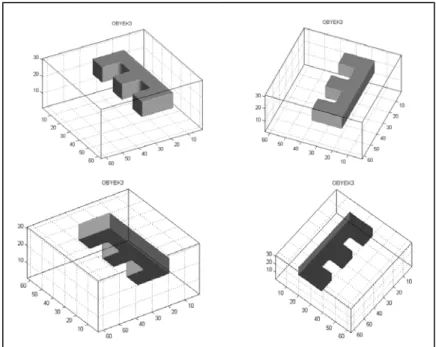
Gambar 3.8 Obyek 3 dilihat dari berbagai perspektif
Obyek 2 sedikit lebih kompleks daripada obyek 1. Obyek 2 merupakan modifikasi dari obyek 1. Pada obyek 2 juga merupakan balok sederhana padat yang memiliki lubang berbentuk balok.
Obyek 3 merupakan bentuk huruf E tiga dimensi. Dasar dari bentuk huruf E ini merupakan bentuk balok pada obyek 1.
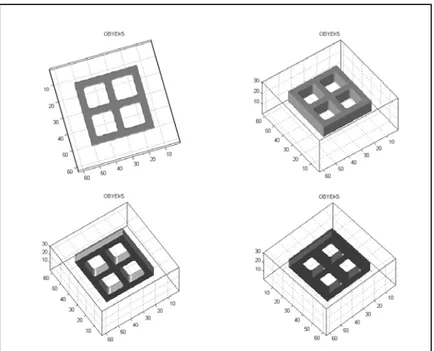
Gambar 3.10 Obyek 5 dilihat dari berbagai perspektif
Obyek 4 juga sama sederhananya dengan obyek 1. Bentuk cincin memudahkan untuk memverifikasi citra Sinar-X simulasi yang dihasilkan.
Obyek 5 adalah obyek berbentuk balok dengan panjang dan lebar yang sama. Pada bagian tengah obyek terdapat empat buah lubang.
Gambar 3.11 Obyek 6 dilihat dari berbagai perspektif
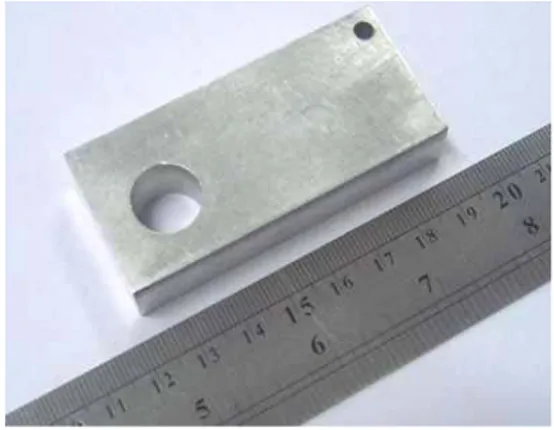
Obyek yang digunakan dalam percobaan pemindaian dengan sumber sinar-X,meja putar dan film sinar-X adalah digunakan sebuah blok uji alumunium, dengan dimensi 73 mm × 33 mm × 14 mm. Diameter lingkaran besar sebesar 15,5 mm. Diameter lingkaran kecil 5mm.
Gambar 3.12 Obyek phantom pemindaian
3.2.6 Simulasi Pemindaian
Pemindaian pada dasarnya adalah pengambilan bayangan dari obyek yang ditembak dengan sinar-X. Bayangan benda merupakan penjumlahan dari properti sinar-X sepanjang lintasan yang dilalui berkas sinar-X. Umumnya properti yang digunakan dalam pencitraan tomography adalah redaman yang dialami sinar-X saat melalui lintasan antara sumber sinar-X dengan detector.
Simulasi ini dibuat berdasarkan definisi ini dengan beberapa asumsi di bawah ini:
1. Sinar-X membentuk berkas kerucut diantara sumber dan detektor 2. Sumber sinar-X diasumsikan sebagai sumber berbentuk titik 3. Detektor sinar-X diasumsikan sebagai detektor datar dua dimensi 4. Detektor merupakan detektor maya yang diletakkan di pusat rotasi 5. Jarak antara sumber dan pusat rotasi adalah 252 voksel
6. Pemindaian dilakukan dari sudut 0-360 derajat
7. Pemindaian dilakukan dengan resolusi angular 1,3, 5, dan 10 derajat
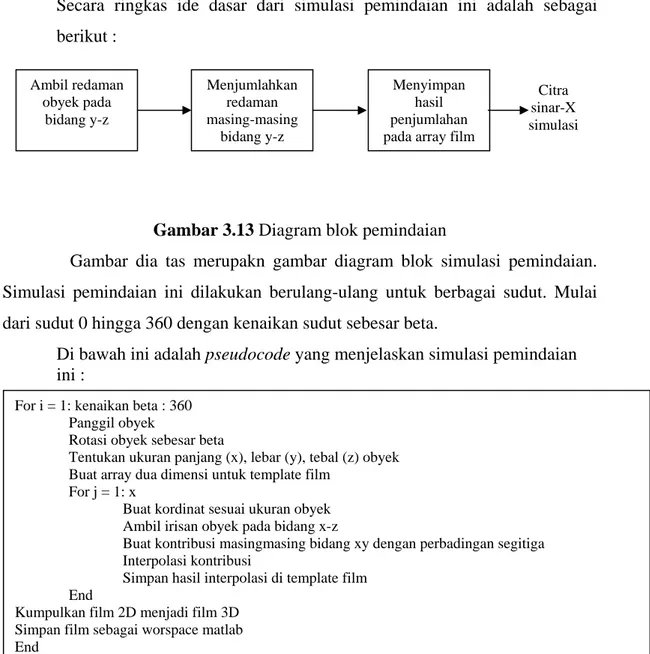
Secara ringkas ide dasar dari simulasi pemindaian ini adalah sebagai berikut :
Gambar 3.13 Diagram blok pemindaian
Gambar dia tas merupakn gambar diagram blok simulasi pemindaian. Simulasi pemindaian ini dilakukan berulang-ulang untuk berbagai sudut. Mulai dari sudut 0 hingga 360 dengan kenaikan sudut sebesar beta.
Di bawah ini adalah pseudocode yang menjelaskan simulasi pemindaian ini :
Gambar 3.14 Pseudocode simulasi pemindaian
Pertama-tama, obyek simulasi diletakkan ke dalam ruang pemindaian maya dengan posisi sedemikian rupa sehingga sumbu rotasi pemindaian berada tepat pada garis tengah obyek. Garis tengah ini terbentuk dari titik tengah sisi atas dan sisi bawah obyek. Dengan demikian titik tengah obyek berimpit dengan titik origin sistem kordinat xyz. Sumber sinar-X diasumsikan berimpit dengan titik x = 252 piksel. Detektor diasumsikan berada pada sumbu rotasi pemindaian.
Meletakkan sumbu rotasi di garis tengah obyek dilakukan dengan teknik sebagai berikut : Ambil redaman obyek pada bidang y-z Menjumlahkan redaman masing-masing bidang y-z Menyimpan hasil penjumlahan pada array film
Citra sinar-X simulasi
For i = 1: kenaikan beta : 360 Panggil obyek
Rotasi obyek sebesar beta
Tentukan ukuran panjang (x), lebar (y), tebal (z) obyek Buat array dua dimensi untuk template film
For j = 1: x
Buat kordinat sesuai ukuran obyek Ambil irisan obyek pada bidang x-z
Buat kontribusi masingmasing bidang xy dengan perbadingan segitiga Interpolasi kontribusi
Simpan hasil interpolasi di template film End
Kumpulkan film 2D menjadi film 3D Simpan film sebagai worspace matlab End
a. Mengukur panjang, lebar, dan tebal ruang pemindaian maya
b. Membuat tiga buah jaring/grid dari dengan kordinat sebagai berikut :
i. Grid 1 : 1- panjang ii. Grid 2 : 1- lebar iii. Grid 3 : 1- tebal
c. Mencari titik tengah panjang, lebar dan tebal obyek d. Menggeser grid 1,2, dan 3 dengan cara sebagai berikut :
i. Grid 1 – titik tengah panjang ii. Grid 2 – titik tengah lebar iii. Grid 3 – titik tengah tebal
Dengan berakhirnya langkah ini, pemidaian siap untuk dilaksanakan.
Obyek kemudian dirotasikan sesuai dengan sudut pemindaian yang diinginkan. Setelah itu template citra sinar-X (film) kosong dibuat. Film ini berupa array dua dimensi berisi zero. Panjang array film disebut sebagai a. Tinggi array film disebut sebagai b.
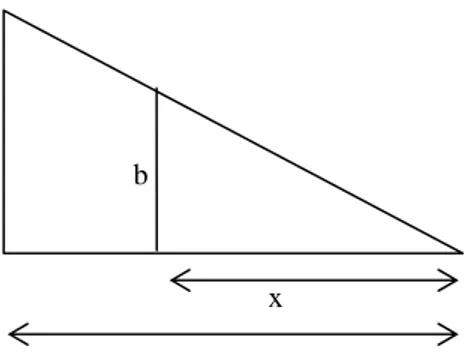
Langkah pertama dalam pemindaian adalah menetukan kontribusi redaman yang dialami oleh sinar-X pada masing-masing bidang x-z. Penentuan kontribusi masing-masing bidang ini dihitung dengan perbandingan segitiga sebagai berikut:
Gambar 3.15 Perbandingan segitiga untuk mencari tinggi array film b
dalam rangka mencari kontribusi redaman pada masing-masing bilang x-z
x z
R b
Gambar 3.16 Perbandingan segitiga untuk tinggi mencari tinggi array
film a dalam rangka mencari kontribusi redaman pada masing-masing bilang x-z
y R x R a= − (3-1) z R x R b= − (3-2) Dalam proses penentuan kontribusi ini terdapat nilai-nilai a dan b yang tidak bulat. Oleh karena itu perlu dilakukan interpolasi untuk mengisi array kontribusi ini dengan nilai yang tepat. Interpolasi yang digunakan adalah interpolasi bilinear. Hasil kontribusi ini kemudian disimpan pada template film (citra Sinar-X)
Proses ini terus dilakukan hingga sudut 360 derajat.
Rekonstruksi Citra
Tahapan berikutnya setelah simulasi pemindaian obyek adalah rekonstruksi hasil simulasi menjadi citra tiga dimensi. Proses rekonstruksi akan dijelaskan pada bagian ini.
Rekonstruksi citra ini dapt dijelaskan dengan tahapan sebagai berikut :
Gambar 3.17 Diagram blok algoritma rekonstruksi citra FDK x y R a Modifikasi citra Sinar-X dengan faktor pembobot Citra Sinar-X terbobot Penapisan Sinar-X terbobot Citra Sinar-X terbobot terfilter Proyeksi balik citra Sinar-X terbobot terfilter Tomogram tiga dimensi
Algoritma Rekonstruksi
Ide dasar dari rekonstruksi adalah mengembalikan intensitas piksel pada citra ronsen kepada masing-masing voksel pada ruang pemindaian. Proses ini disebut proyeksi balik. Jika ada 360 buah citra ronsen, proyeksi balik dilakukan sebanyak 360 kali. Setelah dilakukan proyeksi balik dilakukan penjumlahan hasil proyeksi balik untuk masing-masing sudut pemindaian. Dalam rekonstruksi citra dua matra, metode ini sering disebut metode filtered backprojection. Untuk rekonstruksi citra tiga matra dari proyeksi berkas kerucut digunakan metode Feldkamp-Davis-Kress (FDK). Sistem rekonstruksi citra dalam penelitian ini merupakan implementasi dari metode FDK.
Beberapa batasan yang digunakan dalam sistem rekonstruksi citra ini adalah sebagai berikut:
1. Filter yang digunakan adalah filter Shepp-Logan
2. Untuk memisahkan latar belakang digunakan teknik pengambangan citra dengan parameter pengambang sebesar 0.5
3. Teknik interpolasi yang digunakan adalah teknik interpolasi bilinear Sebagai pembandingnya, dalam penelitian ini teknik rekonstruksi FDK dibandingkan dengan teknik rekonstruksi parallel dan teknik rekonstruksi fan beam.
Berikut ini adalah pseudocode dari kedua teknik rekonstruksi di atas:
Gambar 3.18 pseudocode rekonstruksi citra invers radon dan invers fan beam
Panggil Film Hitung tinggi film Hitung lebar film
For ii = 1 : tinggi
Sinogram = film(:,ii,:);
RekonRadon(:,:,ii)=Rekonstruksi sinogram dengan invers radon RekonFanBeam(:,:,ii)=Rekosntruksi sinogram dengan invers fanbeam End
Tampilkan RekonRadon Tampilkan RekonFanbeam Panggil Obyek
Hitung PSNR
Pertama-tama dilakukan tahapan persiapan. Film-film yang telah dikumpulkan menjadi arrray tiga dimensi dipanggil. Setelah itu tinggi dan lebar film diukur/dihitung.
Tahapan berikutnya adalah pembuatan sinogram dan rekonstruksi citra. Sinogram merupakan susunan proyeksi objek pada seluruh sudut untuk satu irisan Sinogram dibuat dengan untuk masing-masing irisan obyek pada bidang x-y. Proses pembuatan sinogram dapat dijelaskan dengan gambar di bawah ini :
Gambar 3.19 Ilustrasi pembuatan sinogram
Citra Sinar-X terdiri dari beberapa baris dan kolom. Citra Sinar-X ini merupakan proyeksi obyek pada satu sudut tertentu. Satu baris pada citra Sinar-X merupakan proyeksi objek pada irisan ke-n. Dengan demikian sinogram dibuat dengan mengambil satu baris pada masing-masing citra Sinar-X dijital dan menyusunnya berurutan berdasarkan sudutnya. Axis x pada sinogram merupakan sudut dan axis y merupakan proyeksi objek
Sinogram ini menjadi masukan proses berikutnya, yaitu proses rekonstruksi. Dengan metode invers radon dan invers fan-beam yang telah dijelaskan pada bab sebelumnya siboram direkonstrukrsi. Hasil rekonstruksi ini adalah irisan melintang/tomogram dua dimensi obyek.
Sinogram irisan ke-n
Citra ronsen pada berbagai orientasi sudut
Irisan ke-n
Untuk mendapatkan tomogram tiga dimensi obyek pembuatan sinogram dilakukan untuk masing-masing baris pada citra Sinar-X. Sinogram kemudian direkonstruksi. Tomogram hasil rekonstruksi disusun sedemikian rupa (seperti pada gambar 2.10) menjadi tomogram tiga dimensi.
Terakhir tomogram hasil rekonstruksi invers radon dan invers fan-beam dievaluasi kualitasnya dengan perhitungan PSNR dan perhitungan kesalahan rekonstruksi voksel.
Berikut ini adalah pseudocode sistem rekonstruksi citra yang dibangun dalam penelitian ini
Gambar 3.20 pseudocode FDK % =====pembobotan====
Panggil film Panggil obyek
Tentukan jarak sumber dengan pusat rotasi (R), tinggi film, lebar film Buat kordinat sesuai tinggi, dan lebar film
Buat array pembobotan untukmasing-masing titik di film Kopi array pembobotan menjadi array 3D
FilmBobot=film*Bobot
% ===== pemfilteran ===== Tentukan jenis filter
FilmBobotTrans=FFT(FilmBobot)
FilmBobotTerfilterTrans=FilmBobotTrans*Filter FilmBobotTerfilterIFFT=(FilmBobotTerfilterTrans)
%====== proyeksi balik ====== Tomo=0;
Tentukan ukuran tomogram Buat kordinat irisan tomogram For ii=0:beta:360
Cari nilai a Cari nilai b
Ambil film (yang telah terfilter fan telah terbobot) per sudut beta Proyeksi balik film
Tomogram= Interpolasi hasil proyeksi balik Tomo = Tomo+Tomogram
End
Tampilkan Hitung PSNR
Hitung kesalahan rekonstruksi
%===========fungsi filter============ Tentukan orde
Buat filter ramp
Rumusan mengenai algoritma FDK sudah dijelaskan pada bab studi literatur. Pada sub bab ini dijelaskan mengenai implementasi numerik dari algoritma ini.
Pembobotan data film/citra Sinar-X proyeksi, mengacu pada studi literatur pada Bab II, rumus nomor 2-34.
Pada perumusan ini pembobotan bergantung pada tiga buah parameter yaitu parameter a,b, dan beta. Di mana a menunjukkan kordinat horizontal pada film, sedangkan b menujukkan kordinat vertikal pada film. Beta merupakan sudut berkas kerucut atau sudut rotasi yang dialami oleh sumber sinar-X relatif terhadap aksis x. Berdasarkan pemahaman ini dapat kita simpulkan bahwa faktor pembobtan tidak tergantung pada aksis z atau posisi elevasi bidang rekonstruksi.
Kondisi ini memberikan kemudahan dalam implementasi numerik proses pembobotan. Faktor pembobotan daoat dibuat menjadi sebuah array khusus yang dinamakan sebagai array faktor pembobot.
Dalam kasus cone-beam tomography, terdapat sejumlah besar citra sinar-X yang menjadi input proses rekonstruksi citra. Ada dua alternatif cara untuk melakukan pembobotan pada citra Sinar-X yang berjumlah banyak: Teknik looping dan perkalian titik tiga dimensi.
Seperti pada teknik looping pada umumnya dilakukan dengan mengalikan masing-masing piksel pada citra Sinar-X dikalikan dengan faktor pembobot. Proses ini dilakukan untuk seluruh citra Sinar-X. Loop dilakukan sebanyak jumlah citra Sinar-X yang tersedia. pseudocode sebagai berikut :
Gambar 3.21 Pseudocode Pembobotan Teknik Loop
Teknik perkalian titik tiga dimensi ini dilakukan dengan membuat array tiga dimensi dari faktor pembobot. Bebeda dengan teknik looping, langkah awal
%pembuatan faktor pembobot FaktorPembobot
%loop pembobotan for i=1:jumlah film
film terbobot= film*.faktor pembobot end
teknik ini adalah membuat sebuah kordinat tiga dimensi. Nilai-nilai kordinat ini dikalikan dengan parameter-parameter untuk membentuk faktor pembobot film. Film-film Sinar-X yang dipersiapkan menjadi film-film tiga dimensi. Film-film ini disusun rangkap
Penapisan dilakukan pada domain frekuensi. Di mana kernel tapis yang di desain pun sudah merupakan kernel filter dalam domain frekuensi. Kernel tapis yang dirancang merupakan kernel filter ramp. Di samping kernel filter ramp, kernel filter ini dapat dikalikan dengan window penghalus citra. Dalam tesis ini digunakan window Shepp–Logan.
Tahapan terakhir dari algoritma rekonstruksi FDK adalah proyeksi balik data film yang telah difilter dan telah dibobot. Pertama-tama dibuat variabel tomo yang berisi zero. variabel tomo ini yang akan menjadi hasil akhir rekonstruksi.
Setelah tomogram terbentuk, tomogram dievaluasi dengan parameter PSNR. PSNR adalah peak signal to noise ratio. Nilai ini menunjukkan perbandingan antara sinyal dan derau yang ada dalam suatu citra. Parameter PSNR biasanya digunakan dalam menentukan kualitas suatu rekosntruksi citra yang terkompresi dibandingkan dengan citra originalnya.
Rumusan PSNR adalah sebagai berikut :
∑
− = N M M N n m I n m I MSE , 2 1 * )] , ( ) , ( [ (3-3) ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = MSE R PSNR 2 10 log 10 (3-4)Di mana MSE merupakan Mean Square Error dari tomogram dibandingkan dengan obyek.
Perhitungan jumlah voksel yang mengalami kesalahan rekonstruksi dilakukan dengan menghitung dua parameter :
eO, menyatakan jumlah voksel obyek simulasi yang mengalami
kesalahan rekonstruksi (direkonstruksi sebagai ruang kosong).
eX, menyatakan jumlah voksel ruang kosong yang mengalami kesalahan
3.2.9 Koreksi Tomogram Hasil Rekonstruksi
Koreksi tomogram hasil rekonstruksi dilakukan untuk menghilangkan kesalahan rekonstruksi yang terjadi pada daerah latar belakang citra.
Koreksi ini terdiri dari tiga tahap yaitu : 1. Median filtering
Median filtering yang dilakukan pada proses ini menggunakan kernel 5x5. Ukuran kernel ini memberikan hasil yang terbaik diantara ukuran-ukuran yang lainnya. Median filtering mengubah setiap intensitas piksel pada citra menjadi intensitas piksel median diantara piksel-piksel tetangganya. Piksel tetangga yang dipertimbangkan dalam proses median filter ini adalah daerah berukuran 5x5 dengan piksel yang akan digantikan sebagai pusatnya.
2. Thresholding
Thresholding merupakan proses pemisahan piksel-piksel berdasarkan derajat keabuan yang dimilikinya. Piksel yang memiliki derajat keabuan lebih kecil dari nilai batas yang ditentukan akan diberikan nilai 0, sementara piksel yang memiliki derajat keabuan yang lebih besar dari batas akan diubah menjadi bernilai 1. Threshold yang yang digunakan dalam koreksi ini sebesar 0.25 dari intensitas maximum.
3. Opening
Teknik opening merupakan salah satu teknik untuk melakukan segmentasi citra. Teknik opening adalah melakukan erosi citra diikuti dengan dilasi pada citra yang telah dierosi menggunakan structruring element yang sama. Erosi adalah proses menghilangkan piksel pada wilayah di sekitar pinggiran batas citra. Dilasi adalah proses menambahkan piksel pada pada pinggiran batas citra.
Proses opening ini dilakukan menggunakan structuring element 2D berjenis disc dengan radius 3 piksel. Proses ini dikerjakan pada seluruh bidang xy, yz, dan xz.