BAB 2
LANDASAN TEORI
Pada bab ini, akan dibahas mengenai teori-teori yang berkenaan tentang proses penanganan noise data dengan menggunakan Algoritma Kalman Filtering dan pergerakan dalam game dengan menggunakan Algoritma PID.
2.1. Robotika
Kata robot diambil dari kata robota, yang mempunyai arti pekerja, dipopulerkan oleh Isaac Asimov pada tahun 1950 dalam sebuah karya fiksinya. Robot biasanya digunakan untuk tugas berat, bahaya, pekerjaan berulang dan kotor. Biasanya, robot industri digunakan dalam garis produksi. Penggunaan lainnya termasuk pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, cari dan tolong, dan pencarian tambang. Belakangan ini robot mulai memasuki pasaran konsumen di bidang hiburan, penyedot debu, dan pendeteksi kebocoran gas.
Robot pertama kali dikembangkan oleh Computer Aided Manufacturing-International (CAM-1), “Robot adalah peralatan yang mampu melakukan fungsi-fungsi yang biasa dilakukan oleh manusia, atau peralatan yang mampu bekerja dengan intelegensi yang mirip dengan manusia”. Definisi kedua, dikembangkan oleh Robotics Institute of America (RIA), perkumpulan pembuat robot yang lebih menitik beratkan terhadap kemampuan nyata yang dimiliki oleh robotterhadap kemiripannya dengan manusia.
hidraulik, atau pneumatik) dan mereka dikendalikan melalui urutan-urutan yang telah dikendalikan melalui program, yang memungkinkan mesin tersebut pada posisi yang diinginkan. Lingkungan seperti ini didefinisikan sebagai lingkungan Dalam perkembangan mesin yang terotomatisasi ini akan menjadi bermacam-macam spesifikasi tergantung kebutuhan aktifitas manusia terhadap otomatisasi industri dan robotika.
Robotika merupakan bidang dinamis yang perkembangannya maju pesat. Perkembangan ini selain melibatkan komputasi, permesinan, dan elektronika juga menyangkut perkembangan teknologi terapan. Penelitian dibidang ini biasanya berakar dari industri, untuk memecahkan masalah dengan teknologi yang ada. Misalnya, pengembangan perangkat lunak untuk mendapatkan algoritma baru bagi pengendalian robot, pengembangan sistem penglihatan dengan sistem resolusi yang lebih tinggi, perbaikan kemampuan sensor dan pengembangan protokol komunikasi untuk komunikasi dengan komputer dan peralatan pabrik, sehingga robot diasumsikan sebagai gabungan antara perangkat mekanik dan perangkat elektronik yang berfungsi untuk menggantikan pekerjaan manusia yang beresiko tinggi, seperti pekerjaan pada temperatur yang tinggi, zat kimia, ruang hampa udara, dan pada kondisi yang tidak mungkin dikerjakan oleh manusia. Ada juga robot yang bertugas sebagai alat hiburan, pengganti pekerjaan yang menuntut keahlian (accurary), kecepatan, dan lain-lain. Robot juga berfungsi untuk mengerjakan pekerjaan yang rutin seperti robot pemintalan benang. Pada bidang pertahanan keamanan (Hankam), robot digunakan sebagai penjinak bom. Saat ini robot dikembangkan agar dapat berpikir sendiri dengan logika-logika yang telah ditanamkan pada software dalam robot tersebut.
dan Evolution Robotics. Ketika para teknisi siap untuk mencoba robot berjalan kembali, mereka mulai dengan hexapod dan platform berkaki banyak lainnya. Robot-robot tersebut meniru serangga dan arthropod dalam bentuk dan fungsi. Trend menuju jenis badan tersebut menawarkan fleksibilitas yang besar dan terbukti dapat beradaptasi dengan berbagai macam lingkungan, tetapi biaya dari penambahan kerumitan mekanik telah mencegah pengadopsian oleh para konsumer. Dengan lebih dari empat kaki, robot-robot ini stabil secara statis yang membuat mereka bekerja lebih mudah. Tujuan dari riset robot berkaki dua adalah mencapai gerakan berjalan menggunakan gerakan pasif-dinamik yang meniru gerakan manusia.
2.2. Mikrokontroler
Mikrokontroler (pengedali mikro) pada suatu rangkaian elektronik yang berfungsi sebagai pengendali yang mengatur jalannya proses kerja dari rangkaian elektronik. Di dalam sebuah IC mikrokontroler terdapat CPU, memori, timer, saluran komunikasi serial dan paralel, port input/output, ADC, cll. Mikrokontroler digunakan dalam sistem elektronik seperti: Sistem manajemen mesin mobil, keyboard computer, instrumen pengukur elektronik ( seperti multimeter digital, synthesizer frekuensi, dan osiloskop), televisi,radio, telepon digital, mobile phone, microwave oven, IP phone, printer, scanner, kulkas, pendingin ruangan, CD/DVD player, kamera, mesin cuci, PLC(Progammable Logic Controller), Robot, sistem otomasi, sistem akuisisi data, sistem keamanan, peralatan medis (MRI, CT SCAN, ECG, EEG, USG), sistem EDC (Electronic Data Capture), mesin ATM, modem, router, dll (Andrianto, H & Darmawan, A, 2016).
2.3. Arduino
Arduino pada awalnya dikembangkan di Ivrea, Italia. Nama Arduino memiliki arti teman yang kuat. Platform Arduino terdiri dari Arduino board, Arduino shield, bahasa pemrograman Arduino, dan ArduinoIDE (Integrated Development Environment). Arduino board biasanya memiliki sebuah chip dasar mikrokontroler Atmel AVR ATmega8 berikut turunannya. Arduino shield adalah sebuah papan yang dapat dipasang diatas Arduino board untuk menambah kemampuan dari Arduino board (Andrianto, H & Darmawan, A, 2016).
Bahasa pemrograman Arduino adalah bahasa pemrograman yang umum digunakan untuk membuat perangkat lunak yang ditanamkan pada Arduino board. Bahasa pemrograman Arduino mirip dengan bahasa pemrograman C++.
Arduino IDE adalah perangkat lunak yang digunakan untuk menulis dan meng-compile program untuk Arduino. Arduino IDE juga digunakan untuk meng-upload program yang sudah di-compile memori program Arduino board (Andrianto, H & Darmawan, A, 2016).
2.3.1. Arduino Nano
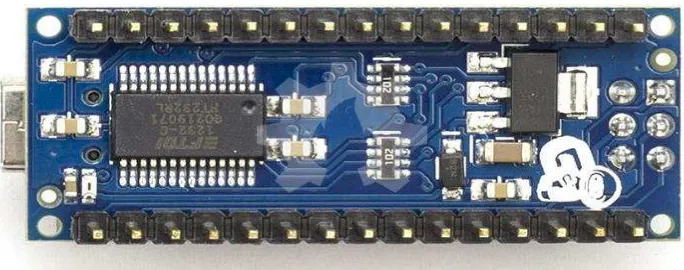
Arduino Nano adalah salah satu papan pengembangan mikrokontroler yang berukuran kecil, lengkap dan mendukung penggunaan breadboard. Arduino Nano diciptakan dengan basis mikrokontroler ATmega328 (untuk Arduino Nano versi 3.x) atau ATmega 168 (untuk Arduino versi 2.x). Arduino Nano kurang lebih memiliki fungsi yang sama dengan Arduino Duemilanove, tetapi dalam paket yang berbeda. Arduino Nano tidak menyertakan colokan DC berjenis Barrel Jack, dan dihubungkan ke komputer menggunakan port USB Mini-B. Arduino Nano dirancang dan diproduksi oleh perusahaan Gravitech (Arduino, 2016). Arduino Nano dapat dilihat pada gambar 2.1(a) dan 2.1(b).
Gambar 2.1 (b). Arduino Nano Tampak Belakang
spesifikasi dari Arduino Nano adalah sebagai berikut :
Mikrokontroler Atmega 328 Tegangan Operasi : 5V
Tegangan Input (rekomendasi) : 7 – 12 V
Pin digital I/O : 14 (6 diantaranya pin Pulse Width Modulation (PWM)) Pin Analog input : 8
Arus DC per pin I/O : 40 mA
Flash Memory : 16 KB dengan 2 KB digunakan untuk bootloader SRAM : 1 KB
EEPROM : 512 Bytes
Kecepatan Pewaktuan : 16 Mhz Ukuran : 1.85cm x 4.3cm
2.3.2. Pin Masukan dan Keluaran Arduino
Komunikasi serial: pin 0 Receiver (RX) dan pin 1 Transmistter (TX), digunakan
untuk menerima (RX) dan mengirim (TX) Serial TTL .
Interupsi Eksternal: pin 2 dan pin 3, pin ini dapat dikonfigurasi untuk memicu
sebuah interupsi pada nilai rendah, sisi naik atau turun, atau pada saat terjadi perubahan nilai.
Pulse-width modulation (PWM): pin 3,5,6,9,10 dan 11, menyediakan keluaran PWM 8-bit dangan menggunakan fungsi analogWrite().
Komunikasi Serial Peripheral Interface (SPI): pin 10 Slave Select (SS), 11 Master Output Slave Input (MOSI), 12 Master Input Slave Output (MISO) dan 13 Serial Clock (SCK), pin ini mendukung komunikasi SPI dengan menggunakan SPI library.
LED: pin 13, Arduino Pro Mini memiliki LED yang terhubung ke pin digital 13.
Ketika pin bernilai HIGH maka LED menyala, sebaliknya ketika pin bernilai LOW maka LED akan padam.
Arduino Nano memiliki 8 masukan analog, setiap pin menyediakan resolusi 10 bit (1024 nilai yang berbeda). Sebagai tambahan beberapa pin masukan analog memiliki fungsi khusus yaitu :
Komunikasi Inter Integrated Circuit (I2C): pin A4 Serial data (SDA) dan A5
Serial Clock (SCL) berkomunikasi menggunkan wire library.
2.4 Game Engine
Gambar 2.2. Aristektur Game Engine (Reodavan, R, 2014).
2.4.1. Unity
Unity Technologies dibangun di tahun 2004 oleh David Helgason Nicholas Francis dan Joachim Ante. Game engine ini di bangun atas dasar kepedulian mereka terhadap indie sdeveloper yang tidak bisa membeli game engine karena terlalu mahal. Fokus perusahaan ini adalah membuat sebuah perangkat lunak yang bisa digunakan oleh semua orang, khususnya untuk membangun sebuah game. Ditahun 2009, Unity diluncurkan secara gratis dan di april 2012. Unity mencapai popularitas tertinggi dengan lebih dari 1 juta developer terdaftar di seluruh dunia (Reodavan, R, 2014).
2.5. Gyroscope
Sensor gerak seperti giroskop berguna untuk memantau gerakan alat. Perkembangan giroskop MEMS (mikro-elektromekanis) giroskop adalah dengan menggunakan konsep pendulum dan elemen getar. Gerakan yang merupakan tindakan langsung
Developer Team Software Development (Delphi,C#,Java)
GAME
Game Engine
Assets Artwork
Image (Photoshop,Gimp), Movie (Ulead,Pinacle),
Sound (SoundForge, Audacity),
3D Model & Animation (3Dmax,Blender)
Function Artwork
mengendalikan input tapi juga bisa menjadi tindakan lingkungan fisik yang bergerak dan posisinya (Mon, Y. 2015)
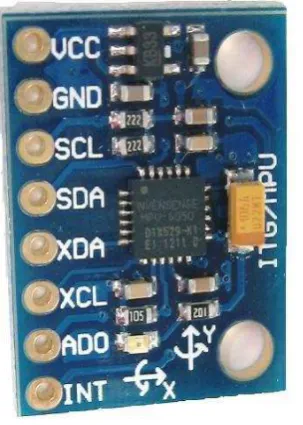
MPU-6050 mengandung sensor accelerometer MEMS dan gyro MEMS dalam satu chip. Hal ini sangat akurat, karena mengandung 16-bit analog ke hardware konversi digital untuk setiap saluran. Maka ia menangkap x, y, dan saluran z pada waktu yang sama. sensor menggunakan I2C-bus untuk antarmuka dengan Arduino.
MPU-6050 tidak mahal, terutama mengingat kenyataan bahwa ia menggabungkan kedua accelerometer dan gyro.Tampilan GyroScope dapat dilihat pada Gambar 2.3 di bawah ini.
.
Gambar 2.3. CY-521 (GyroScope)
Spesifikasi MPU-6050
Chip: MPU-6050 Power Supply : 3-5 v
Jarak Gyroscope : +250 500 1000 2000/s Kisaran Percepatan : 2 4 8 16 g
Mode komunikas : IIC komunikasi protocol
2.6. Bluetooth
Bluetooth adalah sebuah teknologi komunikasi nirkabel yang beroperasi pada pita frekuensi 2,4 Ghz unlicensed ISM (Industrial, Scientific and Medical), Bluetooth dapat dipakai untuk melakukan komunikasi data di antara peralatan dengan jarak jangkauan yang cukup jauh. Besarnya jarak jangkauan tergantung pada kelas Bluetooth. Dalam transceiver Bluetooth ada tiga kelas pembagian daya yaitu:
Daya kelas 1 beroperasi antara 100 mW (20dBm) dan 1Mw (0dBm), dirancang
untuk perangkat dengan jangkauan yang jauh hingga mencapai 100 m.
Daya kelas 2 beroperasi antara 2,5 mW (4dBm) dan 0,25Mw (-6dBm), dirancang
untuk perangkat dengan jangkauan yang jauh hingga mencapai 10 m.
Daya kelas 3 beroperasi antara 1 mW (0dBm), dirancang untuk perangkat dengan jangkauan yang pendek atau sekitar 1 m.
2.6.1. HC-05
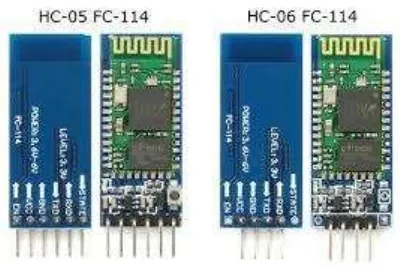
HC-05adalah sebuah modul Bluetooth SPP (Serial Port Protocol) yang mudah digunakan untuk komunikasi serial wireless (nirkabel) yang mengkonversi port serial ke bluetooth. HC-05 menggunakan modulasi bluetooth V2.0 + EDR (Enchanced Data Rate) 3 Mbps dengan memanfaatkan gelombang radio berfrekuensi 2,4 GHz.
Modul ini dapat digunakan sebagai slave maupun master. HC-05 memiliki 2 mode konfigurasi, yaitu AT mode dan Communication mode. AT mode berfungsi untuk melakukan pengaturan konfigurasi dari HC-05. Sedangkan communication mode berfungsi untuk melakukan komunikasi bluetooth dengan piranti lain.
Dalam penggunaannya, HC-05 dapat beroperasi tanpa menggunakan driver khusus. Untuk berkomunikasi antar bluetooth, minimal harus memenuhi dua kondisi berikut :
1. Komunikasi harus antara master dan slave. 2. Password harus benar (saat melakukan pairing).
Jarak sinyal dari HC-05 adalah 30 meter, dengan kondisi tanpa halangan. Adapun spesifikasi dari HC-05 adalah :
Hardware:
– Sensitivitas -80dBm (Typical)
– Daya transmit RF sampai dengan +4dBm.
– Kontrol PIO.
– Antarmuka UART dengan bandrate yang dapat diprogram.
– Dengan antena terintegrasi.
Tampilan Bluetooth HC-05, dapat dilihat pada Gambar 2.4.
Gambar 2.4. Sensor Bluetooth (Andrianto, H, 2016)
Bluetooth Low Energy (BLE): Energi rendah Bluetooth adalah teknologi jaringan area
pribadi nirkabel yang dirancang dan dipasarkan oleh Bluetooth Special Interest Group
yang ditujukan untuk aplikasi baru di industri perawatan kesehatan, kebugaran, suaka,
keamanan, dan hiburan rumah. Dibandingkan dengan Bluetooth Klasik, Bluetooth
Smart dimaksudkan untuk memberikan konsumsi daya dan biaya yang jauh berkurang
sambil mempertahankan jangkauan komunikasi yang serupa. Mobile (Cotta, A. &
Devidas, N. T. 2016)
2.7. Kalman Filtering
R.E Kalman mempublikasikan tulisannya pada tahun 1960 berjudul ”A New Approach
to Linear Filtering andPrediction Problems”. R.E Kalman menjelaskan solusinya atas
masalah filter linear pada data diskrit. Sekarang Kalman filter itu sendiri sudah sering digunakan dikontrol sistem embedded dan sistem navigasi.
An Introduction to the Kalman Filter. Dijelaskan bahwa kalman filter dapat digunakan untukmengilangkan noise dari sensor.
Proses atau sistem harus di modelkan dalam sistem linear. Sistem linear dapat direpresentasikan menjadi dua persamaan yang dapat dilihat pada Gambar 2.5 di bawah ini:
Gambar 2.5. Persamaan Kalman Filter (Rudiyanto, 2006)
Pertama-tama filterakan mengestimasi keadaan sistem pada suatu waktu lalu mendapatkan pengukuran yangber-noise untuk dijadikan feedback. Setelah itu, persamaannya terpecah menjadi dua, yaitu persamaan time update dan measurement update. Time update bisa juga disebut persamaan prediksi dan measurement update disebut persamaan pengoreksi. Di bawah ini dapat dilihat skema algoritma Kalman Filtering dan Persamaannya pada Gambar 2.6 dan Gambar 2.7.
Gambar 2.6. Skema Algoritma Kalman Filtering (Kalane, P. & Loni, P.
2012)
Gambar 2.7.Persamaan Algoritma Kalman Filtering (Kalane, P. & Loni, P. 2012)
N sebagai masukkan banyak iterasi yang diinginkan. Q sebagai matriks kovarians.
Rk = R sebagai matriks kovarians. a00 sebagai masukkan nilai awal a00. a10 sebagai masukkan nilai awal a10.
penggunaan algoritma Filter Kalman mempunyai pengaruh baik terhadap perbaikan hasil prediksi terbukti dari nilai MAPE pada data suhu udara dengan ARIMA adalah 2,20288828 sedangkan nilai MAPE dengan Filter Kalman mempunyai nilai yang lebih kecil yaitu 1,935357143. Hal yang sama juga belaku pada data kecepatan angin dimana penggunaan algoritma Filter Kalman mempunyai pengaruh baik terhadap perbaikan hasil prediksi terbukti dari nilai MAPE dengan ARIMA adalah 28,90889689 sedangkan nilai MAPE dengan Filter Kalman mempunyai nilai yang lebih kecil yaitu 18,73821429. (Kurniawan, T., Hanafi, L. & Apriliani, E. 2013)
2.8. PID
Tujuan penyetelan PID controller adalah untuk menentukan parameter yang memenuhi spesifikasi kinerja sistem loop tertutup, dan untuk memperbaiki kinerja loop kontrol yang kuat pada berbagai kondisi operasi. Praktis, seringkali sulit untuk sekaligus meraih semua (Bassi, S.J,. Mishra, M.K,. & Omizegba, E.E. 2011)
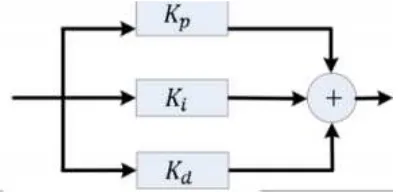
PID. PID sudah teruji oleh banyak komunitas engineer.Lebih dari 70 tahun setelah ditemukannya PID, PID masih digunakan sebagai kontroler utama pada industri. Pada Gambar 2.8 dan Gambar 2.9 di bawah, dapat dilihat proses kerja PID kontroler dan diagram blok PID.
Gambar 2.8. PID kontroler (Royyan, 2015)
Gambar 2.9. Diagram Blok PID (Royyan, 2015)
Berikut ini merupakan penjelasan singkat dari parameter-parameter yang ada pada kontrol PID :
Kontrol Proportional
Kontrol proportional umumnya dinyatakan dengan sebuah gain tanpa memberikan efek dinamik kepada kinerja kontroler. Adanya kontroler proportional ini mengakibatkan sinyal errorakansemakin besar sehingga memperbesar kemungkinan terjadinya overshoot. Namun kontrol proportional dapat mengakibatkan keluaran sistem lebih cepat mencapai set point. Kontrolproportional memperbaiki rise time dan settling time dari sebuah sistem.
Kontrol Integral
integral ini juga akan membuat respon dari sistem menjadi lambat. Oleh sebabitu maka dalam implementasinya kontrol integral dikombinasikan dengan kotrol proportional.
Kontrol Derivative
Keuntungan dari menggunakan kontrol derivative yaitu dapat merespon perubahan error aktuatordan dapat menghasilkan koreksi yang signifikan sebelum magnitude dari error aktuatornya menjadisangat besar. Seakan-akan kontrol derivative ini mampu memprediksi error yang akan terjadisebagai efek dari perhitungan error yang sebelumnya. Karena kontrol derivative ini bekerja. Berdasarkan laju perubahan error aktuatornya dan bukan pada error aktuator itu sendiri maka kontrolderivative ini tidak dapat berdiri sendiri. Kontrol derivative biasanya dikombinasikan dengan kontrolproportional atau dengan kontrol proportional sekaligus integral. Persamaan rumus PID (Propostional Integral Deriaive) dapat dilihat pada Gambar 2.10.
2.9. Penelitian yang Relevan
Berikut ini beberapa penelitian tentang robotika yang berkaitan dengan Algoritma PID dan Kalman Filtering :
No Nama/Tahun Judul Hasil Penelitian
1 Nur Hidayat
Berdasarkan hasil yang didapat, gabungan sistem navigasi dan pengendali yang diusulkan mampu
Mengendalikan quadrotor sehingga sudut sistem dapat dikendalikan.
2 Nando Kusmanto
(2009)
Rancang bangun sistem navigasi inersia dengan kalman filter pada mikrokontroler AVR