BAB II
BAB II
LANDASAN TEORI
LANDASAN TEORI
II.1. Dasar
II.1. Dasar
–
–
Dasar Teori Dasar Teori PengukuranPengukuranPada pekerjaan pemetaan, salah satu tahap pekerjaan yang sangat penting Pada pekerjaan pemetaan, salah satu tahap pekerjaan yang sangat penting adalah pengukuran kerangka peta. Kerangka peta di lapangan pada umumnya adalah pengukuran kerangka peta. Kerangka peta di lapangan pada umumnya ditandai dengan patok, baik patok yang permanen ataupun patok sementara dari ditandai dengan patok, baik patok yang permanen ataupun patok sementara dari kayu. Kerangka dasar peta dapat dibagi menjadi dua macam, yakni kerangka kayu. Kerangka dasar peta dapat dibagi menjadi dua macam, yakni kerangka horizontal (planimetris) dan kerangka vertikal (tinggi).
horizontal (planimetris) dan kerangka vertikal (tinggi).
Kegunaan dari kerangka peta adalah sebagai pengikat detil yang berada di Kegunaan dari kerangka peta adalah sebagai pengikat detil yang berada di sekitarnya, sehingga bisa dipresentasikan menjadi sebuah peta. Ada beberapa cara sekitarnya, sehingga bisa dipresentasikan menjadi sebuah peta. Ada beberapa cara atau metode pengadaan kerangka peta, antara lain :
atau metode pengadaan kerangka peta, antara lain : 1.
1. metode poligon,metode poligon, 2.
2. metode triangulasi atau trilaterasi,metode triangulasi atau trilaterasi, 3.
3. metode pemotongan (ke muka dan ke belakang),metode pemotongan (ke muka dan ke belakang), 4.
4. GPS (GPS (Global Positioning SystemGlobal Positioning System), yang paling modern dengan bantuan), yang paling modern dengan bantuan satelit.
satelit.
Metode poligon, sampai saat ini merupakan yang paling sering digunakan, hal Metode poligon, sampai saat ini merupakan yang paling sering digunakan, hal ini disebabkan poligon paling mudah menyesuaikan dengan keadaan lapangan dan ini disebabkan poligon paling mudah menyesuaikan dengan keadaan lapangan dan mudah dalam persiapan maupun pelaksanaan pengukurannya.
mudah dalam persiapan maupun pelaksanaan pengukurannya.
II.1.1. Pengukuran kerangka kontrol horisontal (KKH) II.1.1. Pengukuran kerangka kontrol horisontal (KKH)
Pengukuran kerangka kontrol horizontal (KKH) ini mengukur jarak dan sudut. Pengukuran kerangka kontrol horizontal (KKH) ini mengukur jarak dan sudut. Dalam Praktek Kerja Lapangan ini, kerangka peta yang digunakan dalam pemetaan Dalam Praktek Kerja Lapangan ini, kerangka peta yang digunakan dalam pemetaan horisontal adalah poligon. Kegiatan yang dilakukan pada pengukuran poligon adalah horisontal adalah poligon. Kegiatan yang dilakukan pada pengukuran poligon adalah pengukuran sudu
pengukuran sudut, jarak, dan azimuth.t, jarak, dan azimuth.
II.1.1.1. Poligon. Poligon berasal dari kata
II.1.1.1. Poligon. Poligon berasal dari kata poli poli yang berarti banyak danyang berarti banyak dan gonos gonos yang berarti sudut. Poligon dapat diartikan sebagai sudut banyak, namun arti yang berarti sudut. Poligon dapat diartikan sebagai sudut banyak, namun arti sebenarnya adalah sebagai suatu rangkaian dari titik-titik secara berurutan sebagai sebenarnya adalah sebagai suatu rangkaian dari titik-titik secara berurutan sebagai kerangka pemetaan. Sebagai kerangka dasar pemetaan, posisi atau koordinat kerangka pemetaan. Sebagai kerangka dasar pemetaan, posisi atau koordinat
titik-titik poligon harus diketahui atau ditentukan secara teliti karena akan digunakan sebagai ikatan detil (Basuki, 2011).
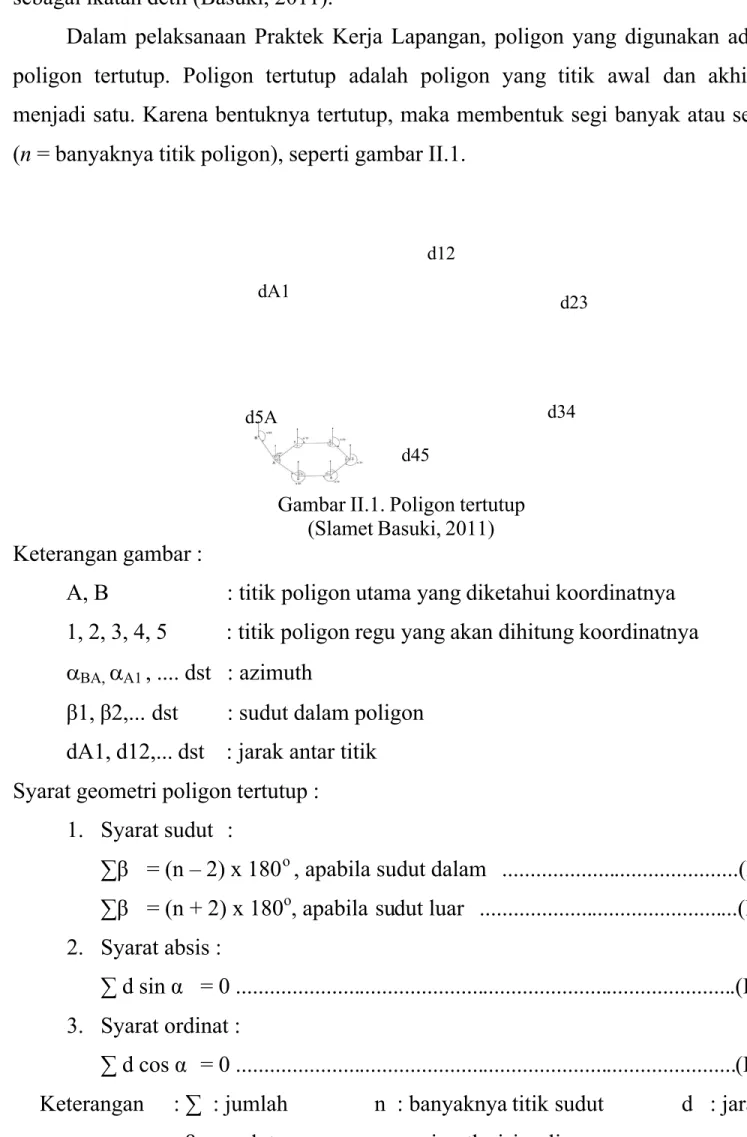
Dalam pelaksanaan Praktek Kerja Lapangan, poligon yang digunakan adalah poligon tertutup. Poligon tertutup adalah poligon yang titik awal dan akhirnya menjadi satu. Karena bentuknya tertutup, maka membentuk segi banyak atau segi n (n = banyaknya titik poligon), seperti gambar II.1.
Gambar II.1. Poligon tertutup (Slamet Basuki, 2011)
Keterangan gambar :
A, B : titik poligon utama yang diketahui koordinatnya 1, 2, 3, 4, 5 : titik poligon regu yang akan dihitung koordinatnya
BA,A1, .... dst : azimuth
β1, β2,... dst : sudut dalam poligon dA1, d12,... dst : jarak antar titik Syarat geometri poligon tertutup :
1. Syarat sudut :
∑β = (n – 2) x 180o, apabila sudut dalam ...(II.1) ∑β = (n + 2) x 180o, apabila sudut luar ...(II.2) 2. Syarat absis :
∑ d sin α = 0 ...(II.3) 3. Syarat ordinat :
∑ d cos α = 0 ...(II.4) Keterangan : ∑ : jumlah n : banyaknya titik sudut d : jarak
β : sudut α : azimuth sisi poligon
dA1 d5A d12 d23 d34 d45
Dalam kenyataannya, pengukuran yang terjadi di lapangan yaitu :
1. ∑β = ( n – 2 ) x180° ± fβ ...(II.5) dimana fβ : kesalahan penutup sudut. Kesalahan ini dikoreksikan ke setiap sudut ukuran dengan prinsip bagi rata dengan rumus :
∆
=
...(II.6)Keterangan : n merupakan jumlah titik sudut.
2. ∑ d sin α = 0 ± fx ...(II.7) dimana fx : kesalahan penutup absis. Kesalahan ini dikoreksikan kepada masing-masing sisi poligon dengan rumus :
∆
...(II.8)3. ∑ d cos α = 0 ± fy ...(II.9) diman fy : kesalahan penutup ordinat. Kesalahan ini dikoreksikan kepada masing-masing sisi poligon dengan rumus :
∆
... (II.10)Keterangan : di : jarak sisi tiap poligon
∑d : jumlah jarak semua titik poligon
Dengan harga d sin dan d cos yang telah dikoreksi, maka untuk menghitung koordinat titik poligon dengan rumus :
X1 = XA + d sin A1... (II.11)
Y1 = YA + d cos A1... (II.12)
Untuk ketelitian poligon, dinyatakan dalam kesalahan linear yang didapat yaitu perbandingan antara kesalahan penutup dan jarak total dari sisi poligon, misal
1:7500.
Kesalahan linear dirumuskan =
... (II.13)dimana,
√
... (II.14) ∑d = jumlah jarak.II.1.1.2.Sudut horizontal. Sudut horizontal adalah selisih dua arah. Sudut horizontal pada suatu titik lapangan dapat dibagi dalam sudut tunggal dan sudut yang lebih dari satu sehingga teknik pengukurannya juga berbeda (Basuki,2011). Dapat juga diperoleh dengan mengurangkan azimuth dua buah sisi pembentuk sudut. Pengukuran sudut dengan kedudukan teropong biasa dan luar biasa dari sebuah sudut tunggal disebut satu seri rangkap pengukuran.
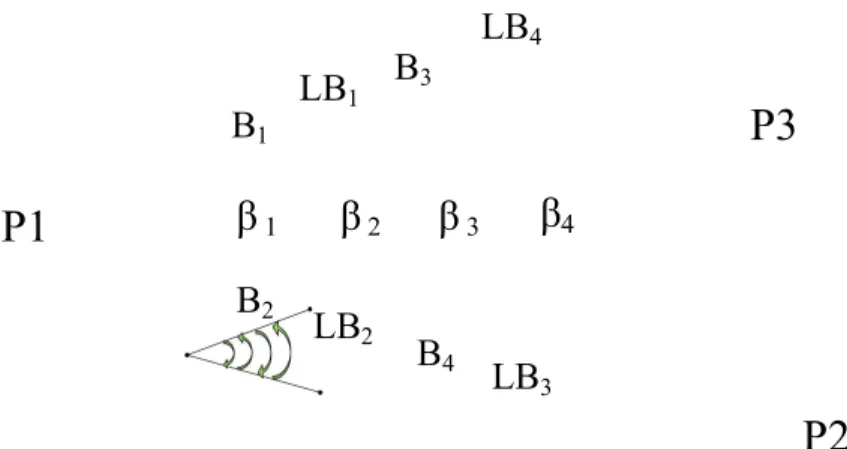
Dalam pelaksanaan Praktek Kerja Lapangan, metode yang digunakan untuk pengukuran sudut horizontal adalah dua seri rangkap. Untuk lebih jelasnya dapat
dilihat pada gambar II.2.
Gambar II.2. Metode pengukuran sudut dua seri rangkap
Keterangan :
P1, P2, P3 : titik poligon
B1,B2,B3,B4 : bacaan horizontal posisi teropong biasa
LB1,LB2,LB3,LB4 : bacaan horizontal posisi teropong luar biasa
β 1, β2, β3, β4 : sudut horizontal (sudut dalam)
Sehingga sudut dapat dihitung dengan rumus :
β terukur = bacaan β titik P2 – bacaan β titik P3 ...(II.15) a. β 1(biasa) = B2 – B1
b. β 2(luar biasa) = LB2 – LB1
c. β 3(biasa) = B4 – B3
d. β 4(luar biasa) = LB4 – LB3
Maka besarnya sudut horizontal dalam dapat dihitung dengan rumus :
{
()
( )
}
/ 2 ...(II.16) P1 P2 P3 β 1 β 2 β 3 β4 B1 B2 B3 B4 LB1 LB2 LB4 LB3II.1.1.3. Pengukuran jarak. Jarak adalah panjangan terpendek antara dua titik di lapangan pada bidang horizontal. Pengukuran jarak dapat dilakukan dengan metode secara langsung dan tidak langsung.
Pengukuran jarak langsung adalah pengukuran dengan menggunakan pita ukur, dibantu alat lainnya seperti jalon, unting-unting, dan pen ukur. Apabila pengukuran tidak dapat dilakukan dengan sekali bentangan pita ukur karena jarak yang melebihi pita ukur perlu dilakukan pelurusan dengan membuat penggal-penggal terlebih
dahulu seperti gambar II.3.
Gambar II.3. Pengukuran jarak langsung
(http://geomaticsandsurveying.blogspot.com/2012/12/kerangka-kontrolhorizontal.html)
Pengukuran jarak tidak langsung adalah pengukuran yang dapat dilakukan dengan metode jarak optis, elektro optis, dan elektronis. Pada praktek kerja lapangan, pengukuran yang dilakukan menggunakan metode jarak elektronis yaitu menggunakan EDM ( Electric Distance Measurement ). Kelebihannya adalah jarak yang di ukur lebih cepat dan teliti dan jarak yang ditunjukkan dalam bentuk digital dalam feet atau meter.
Konsep dasar pengukuran jarak elektronik adalah suatu sinyal gelombang elektromagnetik yang dipancarkan dari suatu alat yang dipasang pada stasiun di ujung suatu garis yang akan diukur jaraknya, kemudian di ujung lain dari garis tersebut dipasang pemantul atau reflector . Sinyal tersebut dipantulkan kembali ke pemancar, waktu lintas perjalanan sinyal pulang-pergi diukur oleh pemancar
(Basuki,2011). Seperti terlihat pada Gambar II.4.
Gambar II.4. Pengukuran jarak elektronik dengan EDM
(http://surveyorcommunity.wordpress.com/2011/02/09/electronic-total-station/)
Pengukuran jarak dilakukan secara pengukuran pergi dan pulang. Untuk mengetahui jarak rata-rata setiap sisi poligon, dapat dihitung dengan rumus :
d rata-rata
...(II.17)dimana d pergi dan d pulang juga diperoleh dari hasil rata-rata sebanyak data ukuran jarak pergi dan pulang.
Perbandingan selisih jarak pergi-pulang dengan jarak reratanya dapat dihitung dengan rumus :
...(II.18)atau standar deviasi pengukuran jarak setiap sisi poligon lebih kecil atau sama dengan 5 mm ± 5 ppm D ( D dalam milimeter) ...(II.19)
II.1.1.4. Azimuth. Azimuth adalah sudut arah yang dimulai dari arah utara berputar searah putaran jarum jam. Arah utara yang sebenarnya adalah arah kutub
utara bola bumi atau arah meridian.
1. Mencari azimuth dari titik tetap
Gambar II.5. Azimuth dari titik tetap
Azimuth dari A ke B dapat dihitung dengan rumus :
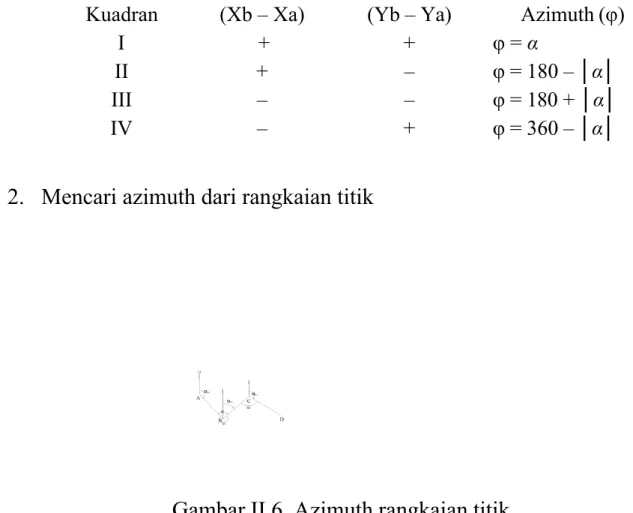
Untuk menghitung azimuth, perlu dilihat terlebih dahulu arahnya terletak dikuadran berapa. Letak kuadran dapat dilihat pada tabel II.1.
Tabel II.1. Kuadran Azimuth
Kuadran (Xb – Xa) (Yb – Ya) Azimuth (φ)
I + + φ =
α
II + – φ = 180 –
│α│
III – – φ = 180 +
│α│
IV – + φ = 360 –
│α│
2. Mencari azimuth dari rangkaian titik
Gambar II.6. Azimuth rangkaian titik
Apabila azimuth AB (αAB) diketahui dan sudut S1 dan S2 telah diukur, maka
azimuth BC (αBC) dapat dicari dengan rumus sebagai berikut :
αBC =αAB + 180° - S2 atau αBC =αAB - 180° + S1 ...(II.21)
Apabila nilai azimuth BC negatif maka harus ditambah 360°, demikian juga apabila nilainya lebih dari 360° harus dikurangi 360°.
II.1.2. Pengukuran kerangka kontrol vertikal (KKV)
Pengukuran kerangka kontrol vertikal (KKV) ini mengukur tinggi. Pengukuran tinggi adalah menentukan beda tinggi antara dua titik. Beda tinggi antara dua titik dapat ditentukan dengan metode pengukuran sipat datar atau dengan metode trigonometrik dan metode takhimetrik. Pengukuran kerangka kontrol vertikal yang dilakukan pada saat PKL menggunakan metode sipat datar.
diarahkan pada rambu-rambu yang berdiri secara vertikal. Sedangkan alat ukurnya dinamakan penyipat datar atau waterpass, dibantu alat lainnya seperti rambu ukur dan sepatu rambu.
Gambar II.7. Prinsip pengukuran beda tinggi
(http://aryadhani.blogspot.com/2012/03/alat-ukur-waterpas-dalam-ilmu-ukur.html)
Keterangan :
A dan B : titik yang akan diukur beda tinggi
a dan b : bacaan rambu (bt) atau tinggi garis mendatar titik ΔH : beda tinggi antara titik A dan B
Beda tinggi antara titik A dan B dapat dirumuskan :
ΔHAB = a – b ...(II.22)
Pengukuran beda tinggi tidak dapat dilakukan dengan sekali berdiri alat apabila jarak antar titik kontrol pemetaan relatif jauh. Oleh karena itu antara dua buah titik kontrol dibuat beberapa slag dan pengukurannya dibuat secara berantai. Pengukuran beda tinggi juga dibuat pengukuran pergi-pulang yang pelaksanaannya dapat dilakukan dalam satu hari (dinamakan seksi), serta dimulai dan diakhiri pada titik tetap. SEKSI A B 2 db1 dm1 db2 dm2 db3 dm3 ∆h12 1 B ∆hA1 ∆h2B Slag 2 Slag 3 A Slag 1 b1 m1 b2 m2 b3 m3
Keterangan :
A,B = titik awal dan akhir pengukuran
1,2 = titik bantu pengukuran (tempat berdiri sepatu rambu) b1,b2,b3 = bacaan benang tengah di rambu belakang
m1,m2,m3 = bacaan benang tengah di rambu muka
db1,db2,db3 = jarak antar alat ke rambu belakang
dm1,dm2,dm3 = jarak antar alat ke rambu muka
∆h1, ∆h2, ∆h3 = beda tinggi setiap slag
Beda tinggi antara A dan B adalah kumulatif dari beda tinggi semua slag, dengan rumus:
hA1 = b1 - m1
h12 = b2 – m2
h2B = b3 – m3
hAB = h = b - m ... (II.23)
Dalam hal ini :
b = jumlah pembacaan rambu belakang
m = jumlah pembacaan rambu muka
h = beda tinggi setiap slag
Pengukuran beda tinggi dalam satu seksi dilakukan pergi pulang, akan didapat beda tinggi pergi (∆h pg) dan beda tinggi pulang (∆h pl) yang besarnya tidak selalu sama.
Beda tinggi definitif adalah rata-rata dari ∆h pg dan ∆h pl atau secara sistematis :
Δhrata-rata =
( )
... (II.24)Salah satu syarat pengukuran beda tinggi adalah jumlah beda tinggi rata-rata harus sama dengan nol,
∑ Δh = 0 ...(II.25) Dalam kenyataannya, pengukuran yang terjadi di lapangan yaitu :
∑ Δh = 0 ± fh ...(II.26) dimana fh : kesalahan penutup beda tinggi. Kesalahan ini kemudian dikoreksikan ke masing – masing sisi poligon dengan rumus :
dimana dhi: koreksi beda tinggi
di : jarak sisi poligon yang sudah diketahui beda tingginya
∑d : jumlah jarak semua sisi poligon
Persamaan untuk mengitung tinggi titik B apabila titik A diketahui tingginya, maka tinggi titik B dapat dihitung dengan :
HB = HA+ ∆hAB ± dhi ...(II.28)
dimana HA , HB : tinggi titik A dan B
∆hAB : beda tinggi AB
II.1.3. Pengukuran detil situasi
Detil adalah segala obyek yang ada di lapangan, baik yang bersifat alamiah seperti sungai, lembah, bukit, alur, dan rawa maupun hasil budaya manusia seperti jalan, jembatan, gedung, lapangan, stasiun, selokan, dan batas-batas pemilikan tanah yang dijadikan isi dari peta yang dibuat (Basuki, 2011). Pengukuran detil ini dimaksudkan untuk mendapatkan gambaran permukaan tanah dan bentukan alam atau manusia, agar dapat disajikan dalam suatu peta situasi.
Penentuan posisi dari titik-titik detil, diikatkan pada titik-titik kerangka pemetaan yang terdekat dalam hal ini titik poligon yang telah diukur sebelumnya. Metode yang digunakan untuk penentuan posisi pada Praktek Kerja Lapangan ini adalah metode ekstrapolasi dengan koordinat kutub yang terikat pada titik kontrol perapatan. Sedangkan untuk penentuan beda tinggi menggunakan metode
trigonometrik.
Gambar II.9. Pengukuran detil metode ekstrapolasi koordinat kutub (http://lmronsolihin.blogspot.com/)
Keterangan :
II.1.4. Penggambaran peta digital
Peta digital merupakan peta yang menggambarkan permukaan bumi yang diolah dengan bantuan perangkat keras komputer. Penggambaran ini dilakukan setelah dilakukan pengolahan data ukuran, seperti melakukan perhitungan karena proses ini untuk mendapatkan informasi dari data (mentah). Data yang digunakan untuk penggambaran peta digital adalah data koordinat X, Y, dan Z (elevasi). Penggambaran peta digital ini menggunakan software Surpac Vision V4.0-L dan ArcGIS 10. Surpac digunakan untuk mengolah data dan editing data, sedangkan ArcGIS digunakan untuk pembuatan layout peta.
II.1.5. Uji peta
Pengujian peta dilakukan dengan maksud untuk menguji kualitas peta dengan mengecek kelengkapan detil, kebenaran arah, skala, dan elevasi. Pengujian kelengkapan detil dilakukan dengan pengecekan lapangan langsung yaitu dengan cara membandingkan kesesuaian hasil gambar peta dengan kondisi di lapangan. Pengujian kebenaran arah, skala, dan elevasi dilakukan dengan pengecekan secara langsung di lapangan dengan cara :
1. Pengecekan sudut : pengukuran sudut suatu obyek atau detil terhadap garis referensi yang telah ditetapkan.
2. Pengecekan skala : pengukuran jarak dari obyek yang satu terhadap obyek yang lain.
3. Pengecekan elevasi : pengukuran beda tinggi antara obyek yang satu dengan obyek yang lain.
II.2. Spesifikasi Teknis (TOR)
Dalam pelaksanaan Praktek Kerja Lapangan diberikan TOR (Term of Reference). TOR merupakan ketentuan dan ketelitian yang diminta dalam proses pelaksanaan suatu pengukuran. TOR dibuat untuk menentukan tata cara dalam
kegiatan pengukuran agar hasil yang didapatkan sesuai dengan yang diharapkan. Penjelasan tentang TOR dalam kegiatan Praktek Kerja Lapangan dapat dilihat pada lampiran B.