4
Di Indonesia pengaturan rambu lalu lintas jalan raya diatur dalam undang undang nomor 22 Tahun 2009. Undang undang tersebut mengatur tentang semua aspek di jalan raya. Salah satunya adalah tentang pengaturan jalan raya di persimpangan jalan, yaitu dengan diberlakukanya lampu lalu lintas. Mengikuti perkembangan dunia teknologi dewasa ini, banyak dilakukan upaya modernisasi pengaturan lampu lalu lintas.
Adistya dan Muslim (2016), melakukan penelitianya dengan berjudul Deteksi dan Klasifikasi Kendaraan Menggunakna Algoritma Backpropagation dan Sobel. Pengenalan objek kendaraan adalah topik yang sangat menarik untuk dijadikan bahan penelitian yang tak ada habisnya. Penggunaan algoritma yang tepat memberikan dampak yang signifikan dalam proses pengenalan dan perhitungannya Sistem dalam jurnal ini dirancang dan diimplementasikan menggunakan java. Sistem ini mewujudkan sebuah aplikasi yang mana dapat mengklasifikasikan kendaraan berdasarkan golongan yang melintas pada ruas tol surabaya-malang km 34 dengan menggunakan Backpropagation untuk learning dan Sobel dalam Pengenalan objek. Pada proses image processing, data yang digunakan 10x10 kemudian dibinerisasi untuk dijadikan nilai input pada jaringan syaraf tiruan menggunakan 3 layer,leraning rate 0.3. Training proses berhenti dengan nilai maksimal 10.000 MSE (Mean Square Error) 0.0001. Tingkat pengujian sistem pada pagi, siang, malam secara rata-rata adalah 94,63% , 93,85% , dan 68,32%.
Budi (2015), melakukan penelitian dengan judul Pemodelan Sistem Kontrol Traffic Light Berdasarkan Kepadatan Kendaraan dengan Teknik Edge Detection dan Logika Fuzzy. Secara umum pengendalian lalu-lintas selama ini menggunakan pengatur lampu lalu lintas (Trafic Light). Penggunaan Trafic Light memiliki kelemahan yaitu pengaturan kendaraan tidak berdasarkan kondisi real-time dari jumlah kendaraan tetapi berdasarkan waktu. Pemafaatan teknologi pengolahan citra digital dapat diterapkan pada sistem trafic light yaitu dengan mendeteksi jumlah
kendaraan dari setiap sisi jalan. Pendeteksian jumlah kendaraan menggunakan metode deteksi tepi (edge detection) merupakan cara untuk mendeteksi kepadatan kendaraan. Metode ini merupakan metode pemfilteran objek untuk mengambil informasi bagian tepi objek berupa data biner. Sedangkan untuk menghasilkan lama waktu yang akan diberikan pada setiap sisi traffic light maka digunakan logika Fuzzy dengan metode Min-Max, sebagai parameter yaitu berdasarkan perbandingan padat kendaran dari setiap sisi jalan. Hasil yang didapatkan yaitu jumlah waktu nyala lampu traffic light pada tiap-tiap ruas berdasarkan kepadatan kendaran, semakin padat kendaraan, maka waktu menyala lampu hijau semakin lama.
Hadi dan Samara (2012), melakukan penelitian dengan judul Deteksi Objek Kendaraan Pada Citra Dijital Jalan Raya Menggunakan Metode Visi Komputer. Pada penelitian ini konsep dan metode visi komputer dieksplorasi dan diterapkan untuk mendeteksi keberadaan kendaraan pada citra digital jalan raya. Konsep utama proses pendeteksian yang dilakukan merupakan gabungan dua metode yakni Hough Transform (HT) dan Connected Component Labeling (CCL). HT digunakan untuk mendeteksi garis tepi jalan raya dengan bantuan beberapa proses lainnya seperti segmentasi dan deteksi tepi. Garis-garis yang diperoleh menjadi batas bagi Region of Interest (ROI) jalan raya sehingga dapat digunakan sebagai acuan bagi proses selanjutnya. CCL adalah metode yang sudah teruji untuk mendeteksi objek yang memiliki karakteristik khusus. CCL merupakan suatu proses pemberian label yang sama pada sekumpulan piksel pembentuk obyek yang saling berdekatan pada suatu citra. Obyek yang berbeda ditandai dengan label yang berbeda. Kendaraan roda empat atau lebih pada suatu citra dapat dideteksi melalui metode ini. Metode CCL pada penelitian ini dikombinasikan dengan beberapa proses lain seperti substraksi, grayscaling, pengambangan, juga proses morfologi opening dan closing sebelum akhirnya dilakukan proses CCL. Dengan metode ini, maka obyek-obyek yang ada di jalan raya seperti mobil dan kendaraan roda empat lainnya dapat dideteksi. Pengujian metode dilakukan dengan menggunakan sebuah citra jalan raya kosong sebagai citra dasar dan 36 buah citra yang berisi objek kendaraan dalam berbagai variasi yang memenuhi segala kemungkinan. Dari hasil eksperimen dihitung parameter ROC berupa sensitivitas dan spesifisitas, hasilnya menunjukkan bahwa
akurasi pendeteksian kendaraan berada pada tingkatan 79.46% berdasarkan tingkat sensitivitas dari metode yang digunakan adalah 96.43%, sedangkan tingkat spesifisitasnya adalah 62.50%.
Prasetyo dan Sutisna (2014), melakukan penelitian dengan judul Implementasi Algoritma Logika Fuzzy untuk Sistem Pengaturan Lampu Lalu Lintas Menggunakan Mikrokontroler. Pada umumnya sistem pengaturan lampu lalu-lintas hanya melakukan pengaturan berdasarkan waktu yang tetap. Pada kenyataanya tingkat kedatangan kendaraan pada persimpangan jalan tidak selalu sama sehingga tentu saja tingkat kemacetan pada persimpangan jalan tidak dapat dikendalikan dengan baik. Pada penelitian ini dibuat simulasi sistem kendali otomatis yang dapat melakukan pengaturan lampu lalu lintas berdasarkan tingkat kedatangan kendaraan dimana sistem pengaturannya tidak konstan tetapi mengikuti tingkat kedatangan kendaraan. Metode yang digunakan untuk mengatur lamanya waktu ini adalah algoritman logika Fuzzy dengan penalaran Fuzzy metode Mamdani. Metode ini dapat memenuhi tujuan pengaturan lalu lintas secara optimal dengn durasi waktu yang diberikan didasarkan pada tingkat kedatangan kendaraan. Semakin tinggi tingkat kedatangan kendaraan makan semakin besar durasi waktu yang diberikan.
Romadhon dan Murinto (2014), melakukan penelitian dengan judul Aplikasi Pengenalan Citra Rambu Lalu Lintas Berbentuk Lingkaran Menggunkan Metode Jarak City-Block. Dalam penelitian ini dilakukan perancangan aplikasi pengenalan citra rambu lalu lintas berbentuk lingkaran. Tujuan dari penghitungan jarak adalah untuk menentukan kesamaan atau ketidaksamaan dua vektor fitur. Tingkat kesamaan dinyatakan dengan suatu skor atau rangking. Semakin kecil nilai rangking, semakin dekat kesamaan kedua vektor tersebut. Pengukuran jarak dilakukan dengan beberapa cara, diantaranya adalah metode Euclidean, City-Block, Minknowski, Chebyshev, Sorensen, Gower, Kulczynski, Intersection, Wave Hedges, Inner Product, Harmonic Mean, Cosine, Jaccard, Dice, One Minus Correlation Coefficient dan lain-lain. Metode yang dipakai dalam penelitian ini adalah city-block. Proses identifikasi citra rambu lalu lintas meliputi: Pengambilan citra digital, Pemrosesan awal (Pre – Processing), Segmentasi (cropping), Resize citra, Penajaman citra (sharpening), Penghitungan Vektor Citra, Klasifikasi,
Pengambilan keputusan dan Hasil Identifikasi. Proses akusisi data citra rambu lalu lintas memanfaatkan kamera digital. Ekstraksi ciri yang dipakai adalah perhitungan vektor. Data yang digunakan sebanyak 90 citra terdiri dari 15 citra acuan dan 75 citra uji. Untuk masing-masing rambu larangan parkir, larangan berhenti, larangan berbelok, larangan melebihi kecepatan 40km/jam dan larangan masuk bagi semua kendaraan data acuan yang digunakan sebanyak 3 citra sedangkan untuk citra uji sebanyak 15 sampel untuk masing-masing jenis rambu lalu lintas. Dari penelitian yang dilakukan menghasilkan sebuah apilkasi pengenalan citra rambu lalu lintas berbentuk lingkaran menggunakan metode jarak city-block. Pengujian untuk kerja sistem dilakukan dengan melakukan variasi ukuran citra 50 piksel x 50 piksel, 75 piksel x 75 piksel, 100 piksel x 100 piksel. Tingkat akurasi pada ukuran 50 piksel x 50 piksel adalah 88 %, ukuran 75 piksel x 75 piksel adalah 86,67 % serta ukuran 100 piksel x 100 piksel adalah 85,33 %. Hasil eksperimen dari pengujian sistem menunjukkan tingkat akurasi yang baik yaitu 88 % pada ukuran citra 50 piksel x 50 piksel.
2.2. Landasan Teori 2.2.1. Lampu Lalu Lintas
Kepadatan kendaraan di jalan dapat berakibat adanya kemacetan di ruas jalan tertentu. Penggunaan lampu lalu lintas (traffic light) di persimpangan jalan merupakan salah satu solusi yang di gunakan untuk mengendalikan arus lalu lintas. Pengendalian sistem lampu lalu lintas mengambil peran penting dalam memberikan kualitas arus lalu lintas yang lebih baik. Strategi yang lebih baik dalam mengendalikan arus lalu lintas memberikan dampak pengurangan polusi, penghematan bahan bakar, serta meningkatkan pergerakan kendaraan dengan mempersingkat waktu perjalanan. Parameter yang digunakan untuk menentukan durasi pada sistem lampu lalu lintas adalah kepadatan kendaraan disuatu sisi persimpangan yang dipengaruhi arus kendaraan di sisi tersebut. Nilai parameter ini tidak dapat diketahui secara pasti, karena berubah terhadap waktu dan kondisi lainnya. Penentuan durasi lampu dapat dilakukan dengan model matematis berdasarkan data historis arus lalu lintas atau dengan kecerdasan buatan. Penelitian
mengenai model matematis untuk memoerkirakan dan mengendalikan arus lalu lintas telah dilakukan sejak tahun 1935. Namun demikian penggunaan data historis sebagai dasar penentuan durasi pada sistem lampu lalu lintas sangat rentang terhadap kesalahan manusia (human error).
Menurut Kamus Besar Bahasa Indonesia (KBBI) lampu lalu lintas berarti lampu berwarna merah, kuning, dan hijau yang dipasang di perempatan atau persimpangan jalan untuk mengatur lalu lintas. Lampu berwarna merah mengisyaratkan kendaraan tidak boleh bergerak. Lampu berwarna kuning, mengisyaratkan kendaraan bersiap-siap untuk berhenti (sesudah lampu hijau) atau mengurangi kecepatan (jika berkedip-kedip), isyarat untuk berhati-hati, isyarat untuk bersiap-siap untuk melakukan kegiatan. Lampu berwarna hijau mengisyaratkan kendaraan boleh jalan.
2.2.2. Citra Digital
Citra adalah gambar dua dimensi yang dihasilkan dari gambar analog dua dimensi yang continue menjadi gambar diskrit melalui proses sampling. Gambar analog dibagi menjadi N baris dan M kolom sehingga menjadi gambar diskrit. Persilangan antara baris dan kolom tertentu disebut dengan piksel. Suatu citra dapat didefinisikan sebagai fungsi f(x,y) berukuran M baris dan N kolom, dengan x dan y adalah koordinat spasial, dan amplitudo f di titik koordinat (x,y) dinamakan intensitas atau tingkat keabuan dari citra pada titik tersebut. Apabila nilai x,y dan nilai amplitudo f secara keseluruhan berhingga (finite) dan bernilai diskrit maka dapat dikatakan bahwa citra tersebut adalah citra digital.
Sebuah citra mengandung informasi tentang obyek yang presentasikan, kemiripan, atau imitasi dari suatu obyek atau benda. Citra dapat dikelompokkan menjadi citra tampak dan citra tak tampak. Untuk dapat dilihat mata manusia, citra tidak tampak harus dirubah menjadi citra tampak, misalnya dengan menampilkannya di monitor, dicetak di kertas dan sebagainya. Salah satu contoh citra tidak tampak adalah citra digital. citra digital ditunjukkan pada Gambar 2.1.
Gambar 2. 1 Koordinat Citra Digital (Putra, 2010)
Citra digital agar dapat diolah dengan dengan komputer, maka harus direpresentasikan secara numerik dengan nilai-nilai diskrit. Representasi citra dari fungsi malar (kontinu) menjadi nilai-nilai diskrit disebut digitalisasi (Munir, 2004). Ada beberapa tahapan yang dilakukan dalam pembentukan citra digital yaitu akuisisi citra, sampling dan kuantisasi. Tahapan pertama yaitu proses akuisisi citra adalah pemetaan suatu pandangan (scene) menjadi citra kontinu dengan menggunakan sensor. Ada beberapa macam sensor untuk akuisisi citra, yaitu sensor tunggal, sensor garis dan sensor larik.
Tahap selanjutnya setelah menjadi citra kontinu yaitu proses sampling, yang merupakan proses untuk menentukan warna pada piksel tertentu pada citra dari sebuah gambar yang kontinu. Pada proses sampling biasanya dicari warna rata-rata dari gambar analog yang kemudian dibulatkan. Proses sampling sering juga disebut proses digitisasi. Kemudian tahap terakhir adalah proses kuantisasi,yang merupakan perubahan nilai amplitudo kontinu menjadi nilai baru yang berupa nilai diskrit. Nilai amplitudo yang dikuantisasi adalah nilai-nilai pada koordinat diskrit hasil proses sampling.
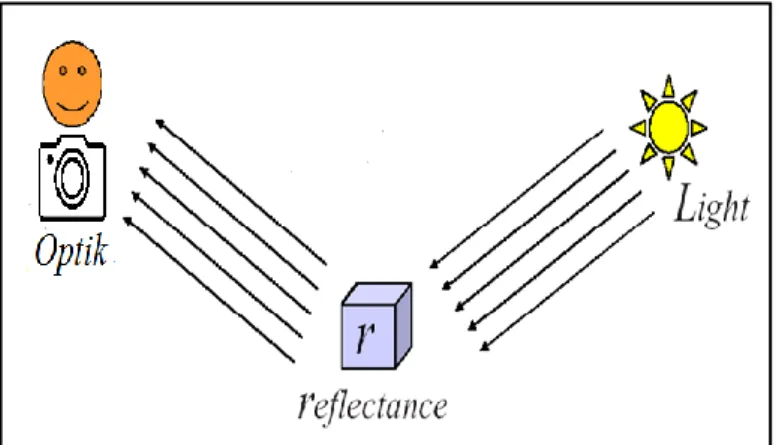
Terjadinya proses citra berawal dari sumber cahaya menerangi obyek, obyek memantulkan kembali sebagian dari berkas cahaya tersebut. Pantulan cahaya
ini ditangkap oleh alat-alat optik, misalnya mata pada manusia, kamera, pemindai (scanner), dan sebagainya, sehingga bayangan obyek yang disebut citra tersebut terekam. Seperti yang ditunjukkan pada Gambar 2.2.
Gambar 2. 2 Proses Pembentukan Citra (Putra, 2010).
2.2.3. Pra-Proses
Pra-proses adalah proses pengolahan data citra asli sebelum data tersebut diproses berikutnya. Beberapa pra-proses yang sering digunakan adalah proses cropping dan proses grayscale (aras keabuan), resize.
Cropping adalah proses pemotongan citra pada koordinat tertentu pada area citra. Proses ini dilakukan untuk mengambil bagian yang dirasa penting atau bagian yang mempunyai paling banyak informasi untuk diolah menggunakan jaringan syaraf tiruan. Selain itu proses ini juga dapat mengubah ukuran citra menjadi lebih kecil, sehingga akan mempercepat proses komputasi.
Selain dengan melakukan cropping, untuk mempercepat proses komputasi dapat melakukan proses grayscale. Grayscale adalah warna-warna piksel yang berada pada rentang gradasi hitam dan putih yang akan menghasilkan efek warna abu-abu. Pada citra ini warna dinyatakan dengan intensitas, dimana intensitas berkisar antara 0 sampai dengan 225, dimana 0 dinyatakan warna hitam dan 225 dinyatakan warna putih (Kadir & Susanto, 2013). Proses grayscale dilakukan dengan mengubah citra 3 layer citra yaitu: red, green dan blue (RGB) menjadi citra 1 layer gray.
Resize adalah proses mengubah ukuran data digital dengan cara mengubah jarak setiap titik pada data terhadap titik acuan. Data dapat diskalakan dengan arah horizontal maupun vertical dengan cara mengalikan koordinat tiap data dengan factor konstanta. Resize keukuran yang lebih kecil akibatnya dapat mengurangi informasi yang terkandung dalam data tersebut.
Citra dapat diperbaiki kualitasnya dan dapat diperhalus dengan melakukan beberapa cara, salah satunya adalah dengan menggunakan masking dengan filter median. Pada filter median, suatu “jendela” (windows) memuat sejumlah piksel (ganjil). Jendela digeser titik demi titik pada seluruh daerah citra. Pada setiap pergeseran dibuat jendela baru. Titik tengah dari jendela ini diubah dengan nilai median dari jendela tersebut (Munir, 2004).
2.2.4. Deteksi Tepi
Deteksi tepi adalah proses yang dijalankan untuk mendeteksi garis tepi (edge) yang membatasi duawilayah citra homogen yang memiliki tingkat kecerahan yang berbeda (pitas. 1993). Edge merupakan tempat-tempat yang memiliki perubahan intensitas yang besar dalam jarak yang pendek.
Edge Detection bertujuan untuk menandai bagian yang menjadi detail gambar/citra untuk memperbaiki detail dari gambar/citra yang blur, atau edge sengaja dikuatkan untuk memperoleh ciri suatu data. Suatu titik (x,y) dikatakan sebagai tepi (edge) dari suatu citra bila titik tersebut mempunyai perbedaan yang tinggi dengan tetangganya dan berikut pengertian dari beberapa metode Sobel, Prewitt, Laplace, Robert, dan Canny.
a. Sobel
Metode ini mengambil prinsip dari fungsi Laplace dan Gaussian yang dikenal sebagai fungsi untuk membangkitkan HPF, dan kelebihan dari metode sobel ini adalah mengurangi noise sebelum melakukan perhitungan deteksi tepi.
b. Prewitt
Metode Prewitt merupakan pengembangan metode Robert dengan menggunakan filter HPF yang diberi satu angka nol penyangga. Metode ini
mengambil prinsip dari fungsi laplacian yang dikenal sebagai fungsi untuk membangkitkan HPF.
c. Laplace
Metode Laplace adalah metode transformasi yang digunakan untuk penyelesaian persamaan diferensial.
d. Robert
Metode Robert adalah nama lain dari teknik differensial pada arah horisontal dan differensial pada arah vertikal, dengan ditambahkan proses konversi biner setelah dilakukan differensial. Maksud konversi biner adalah meratakan distribusi warna hitam dan putih.
e. Canny
Metode Canny merupakan deteksi tepi yang optimal. Operator Canny menggunakan Gaussian Derivative Kernel untuk menyaring kegaduhan dari citra awal untuk mendapatkan hasil deteksi tepi yang halus.
Contoh hasil dari 5 metode deteksi tepi diatas ditunjukkan pada Gambar 2.3.
Gambar 2. 3 Proses Edge Detection
2.2.5. Jaringan Syarat Tiruan
Jaringan syaraf tiruan (neural network) adalah sebuah alat pemodelan data statistik nonlinier. Neural network dapat digunakan untuk memodelkan hubungan
yang kompleks antara input dan output untuk menemukan pola-pola pada data (Widodo, 2005).
Secara garis besar Neural Network mengadopsi dari kemampuan otak manusia yang mampu memberikan stimulasi/rangsangan, melakukan proses, dan memberikan output. Output diperoleh dari variasi stimulasi dan proses yang terjadi di dalam otak manusia. Kemampuan manusia dalam memproses informasi merupakan hasil kompleksitas proses di dalam otak. Misalnya, yang terjadi pada anak-anak, mereka mampu belajar untuk melakukan pengenalan meskipun mereka tidak mengetahui algoritma apa yang digunakan. Kekuatan komputasi yang luar biasa dari otak manusia ini merupakan sebuah keunggulan di dalam kajian ilmu pengetahuan.
Model pada JST pada dasarnya merupakan fungsi model matematika yang mendefinisikan fungsi 𝑓: 𝑥 → 𝑦. Istilah "jaringan" pada JST merujuk pada interkoneksi dari beberapa neuron yang diletakkan pada lapisan yang berbeda. Secara umum, lapisan pada JST dibagi menjadi tiga bagian:
a. Lapis masukan (input layer) terdiri dari neuron yang menerima data masukan dari variabel X. Semua neuron pada lapis ini dapat terhubung ke neuron pada lapisan tersembunyi atau langsung ke lapisan luaran jika jaringan tidak menggunakan lapisan tersembunyi.
b. Lapisan tersembunyi (hidden layer) terdiri dari neuron yang menerima data dari lapisan masukan.
c. Lapisan luaran (output layer) terdiri dari neuron yang menerima data dari lapisan tersembunyi atau langsung dari lapisan masukan yang nilai luarannya melambangkan hasil kalkulasi dari X menjadi nilai Y.
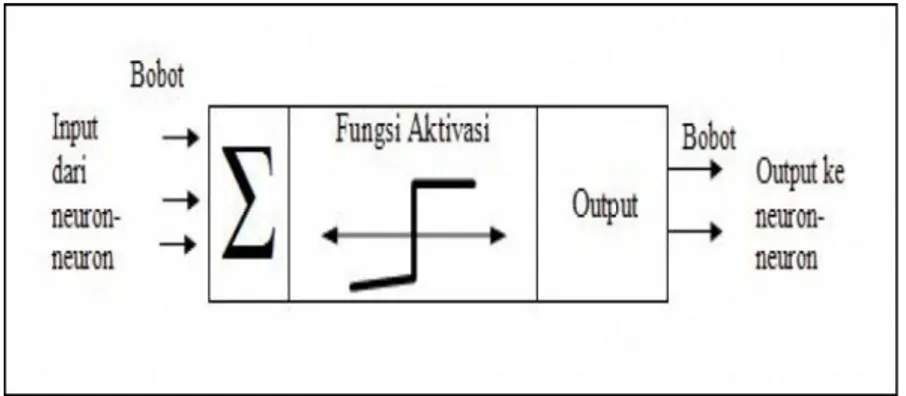
Secara matematis, neuron merupakan sebuah fungsi yang menerima masukan dari lapisan sebelumnya 𝒈𝒊(𝒙) (lapisan ke-𝒊). Fungsi ini pada umumnya mengolah sebuah vektor input untuk kemudian diubah ke nilai skalar melalui komposisi nonlinear weighted sum, dimana𝑓(𝑥) = 𝐾(∑ 𝑤𝑖 𝑖. 𝑔𝑖(𝑥)).
K, merupakan fungsi khusus yang sering disebut dengan fungsi aktivasi dan 𝑤 merupakan beban atau weight.
Keberhasilan perceptron dalam pengklasifikasian pola tertentu ini tidak sepenuhnya sempurna, masih ditemukan juga beberapa keterbatasan di dalamnya. Perceptron tidak mampu untuk menyelesaikan permasalahan XOR (exclusive-OR). Namun demikian, perceptron berhasil menjadi sebuah dasar untuk penelitian-penelitian selanjutnya di bidang neural network. Saat ini neural network dapat diterapkan pada beberapa task, diantaranya classification, recognition, approximation, prediction, clusterization, memory simulation dan banyak task-task berbeda yang lainnya, dimana jumlahnya semakin bertambah seiring berjalannya waktu.
Learning Vector Quantization (LVQ) merupakan salah satu terapan dari neural network. LVQ melakukan proses pemetaan vektor yang berjumlah banyak menjadi vektor dengan jumlah tertentu (Kusumadewi, 2004). Pada pengenalan citra, berupa vektor ciri dari masing-masing citra, yang diperoleh dari proses ekstraksi ciri. Untuk lebih jelasnya ditunjukkan pada Gambar 2.4.
Gambar 2. 4 Jaringan Syaraf Tiruan (Kusumadewi, 2004)
2.2.6. Learning Vector Quaitization
Berdasarkan fungsinya LVQ cocok digunakan untuk klasifikasi dan pengenalan pola. Learning Vector Quantization merupakan bagian dari Jaringan Syaraf Tiruan untuk melakukan pembelajaran pada lapisan kompetitif yang terawasi. Suatu lapisan kompetitif akan secara otomatis belajar untuk mengklasifikasikan vektor-vektor input. Kelas-kelas yang didapatkan sebagai hasil dari lapisan kompetitif ini hanya tergantung pada jarak antara vektor-vektor input.
Jika dua vektor input mendekati sama, maka lapisan kompetitif akan meletakkan kedua vektor input tersebut ke dalam kelas yang sama (Kusumadewi, 2003).
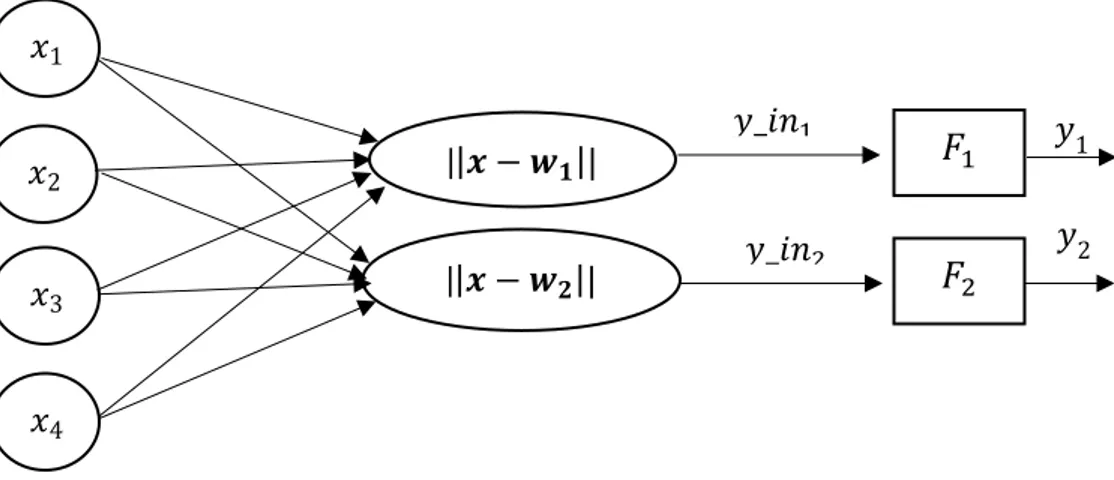
Dalam hal ini diberikan sehimpunan pola yang klasifikasinya diketahui diberikan bersama distribusi awal vektor referensi. Setelah pelatihan jaringan LVQ mengklasifikasikan vektor masukan dalam kelas yang sama dengan unit keluaran yang memiliki vektor bobot (referensi) yang paling dekat dengan vektor masukan. Arsitektur dari LVQ ditunjukkan pada Gambar 2.5.
Gambar 2. 5 Arsitektur Learning Vector Quantization (Kusumadewi, 2004)
Keterangan:
X = Vektor masukan (X1, X2, ..., Xn) F = Lapisan Kompetitif
y_in = Masukan lapisan kompetitif y = Keluaran
W = Vektor bobot untuk unit keluaran
||X-W|| = Selisih nilai jarak Euclidean antara vektor input
Contohnya adalah Klasifikasi Buah Garcia Mangostaba L. Menggunakan Metode Learning Vector Quantization. Terdapat tiga kelas yaitu mutu super, mutu 1, dan mutu 2. Terdapat dua proses dalam metode LVQ, yang pertama adalah proses pelatihan dan yang kedua adalah proses pengujian. Data masukan yang digunakan dalam proses pelatihan dan pengujian merupakan ekstraksi fitur citra buah Garcia
𝑦2 𝐹1 𝑥1 𝑥2 𝑥3 𝑥4 | 𝒙 − 𝒘𝟏 | 𝒙 − 𝒘𝟐 𝑦_𝑖𝑛1 𝑦_𝑖𝑛2 𝑦1 𝐹2
yang diambil dengan menggunakan kamera digital yang terdiri dari mean, standard deviation, kurtosis, skewness dan entropy. Ekstraksi fitur yang digunakan pada penelitian ini didapatkan dari histogram warna, histogram grayscale, histogram tingkat saturasi dan histogram metode Sobel. Metode LVQ akan secara otomatis mengklasifikasikan citra buah manggis ke dalam kelasnya masing-masing. Hasil klasifikasi pada pengujian 1 mendapatkan akurasi sebesar 85 % untuk mutu super, 55 % untuk mutu 1 dan 60 % untuk mutu 2, pada pengujian 2 mendapatkan akurasi sebesar 30 % untuk mutu super, 80 % untuk mutu 1 dan 80 % untuk mutu 2, pada pengujiaan 3 mendapatkan akurasi sebesar 70 % untuk mutu super, 20 % untuk mutu 1 dan 40 % untuk mutu 2.